林業集材用牽引式搭載裝置整體設計及其性能分析與運動仿真1)
2021-07-30 08:07:06孟慶凱王立海劉鐵男張廣暉謝軍明許明賢
東北林業大學學報 2021年7期
關鍵詞:設計
孟慶凱 王立海 劉鐵男 張廣暉 謝軍明 許明賢
(東北林業大學,哈爾濱,150040) (黑龍江省森林工程與環境研究所) (東北林業大學)
集材機具有作業成本低、集采效率高、易操作等優點,成為世界重要的集材方式之一,對林業發展具有舉足輕重的影響[1-4]。1964年,我國首臺自主研發的集材拖拉機(J-50),其具有通過性能好、爬坡能力強的優點,但具有笨重,對林地土壤破壞嚴重的缺陷[5-6];后期,我國又研發了J-80、營林352L型等多種型號的集材拖拉機[7-8]。隨著“天保工程”的實施,采伐和集材方式也不斷發生改變。文獻[5]、[7]介紹的環保型多功能集材機,因為其良好的林區通過性、爬坡能力,逐漸成為現在集材機的重要代表。
以J-50為代表的老式集材機,采用的車尾固定式搭載板集材,存在弊端[9]。一方面,搭載板固定安裝在集材機尾部,集材過程中車輛轉彎半徑增大,對林地破環嚴重;另一方面,搭載板和集材機剛性連接,自由度低,若用于環保型多功能集材機,因為環保型多功能集材機體型小、自身質量輕,使其容易在沿橫坡行駛過程中發生工作事故。本研究結合環保型多功能集材機的特點,設計了一款可牽引式搭載裝置,并通過仿真,對牽引式搭載裝置進行穩定性分析和木材搭載分析,力求設計的牽引式搭載裝置能滿足環保型多功能集材機的集材需要。
1 牽引式搭載裝置設計
為了適應環保型多功能集材機“小而精”的工作特點,設計了牽引式搭載裝置。本設計主要有兩方面的突出優勢:一方面,牽引式搭載裝置通過懸掛式牽引架和集材機連接,但是兩者在一定程度上又相互獨立,增加了集材設備的自由度,使得集材設備在行走過程中靈活,減小轉彎半徑;另一方面,牽引式搭載裝置設置了承重輪胎,與直接安裝在集材機車尾的固定搭載版相比,牽引式搭載裝置不會對集材機產生較大的承重負擔,并且具有更大的載重能力。設計的牽引式搭載裝置(見圖1),采用雙液壓缸進行搭載板的舉升和回落,整體采用鋼結構,通過牽引架和牽引環連接在集材機尾部,牽引式搭載裝置的承重機架上安裝絞盤機,承重機架部分設置有加強筋,以滿足牽引式搭載裝置的集材工作需要。
1.1 裝置參數遴選
牽引式搭載裝置的設計,主要是根據環保型多功能集材機的參數進行設計,以環保型多功能集材機為參考。根據典型環保型多功能集材機的整體參數(見表1),牽引式搭載裝置的寬度需小于集材機的寬度(應小于1 600 mm),選取1 400 mm;牽引式搭載裝置離地間隙選取800 mm。

表1 典型環保型多功能集材機的整體參數
在使用牽引式搭載裝置進行集材過程中,牽引式搭載裝置會與地面產生2個夾角:1個夾角(α)是將木材拖拽到集材裝置上時的過程軌跡與地面產生的夾角;1個夾角(β)是木材被拖拽到搭載裝置上,牽引式搭載裝置在集材機的牽引下,拖拽著木材正常行走的過程中木材與地面產生的夾角[11]。根據文獻資料[8-9],選擇α=25°、β=52°。根據表1,牽引式搭載裝置在集材機的牽引下,拖拽著木材正常行走時,離地間隙應大于集材機的離地間隙(400 mm),現選取為450 mm(見圖2),計算搭載板的長度。
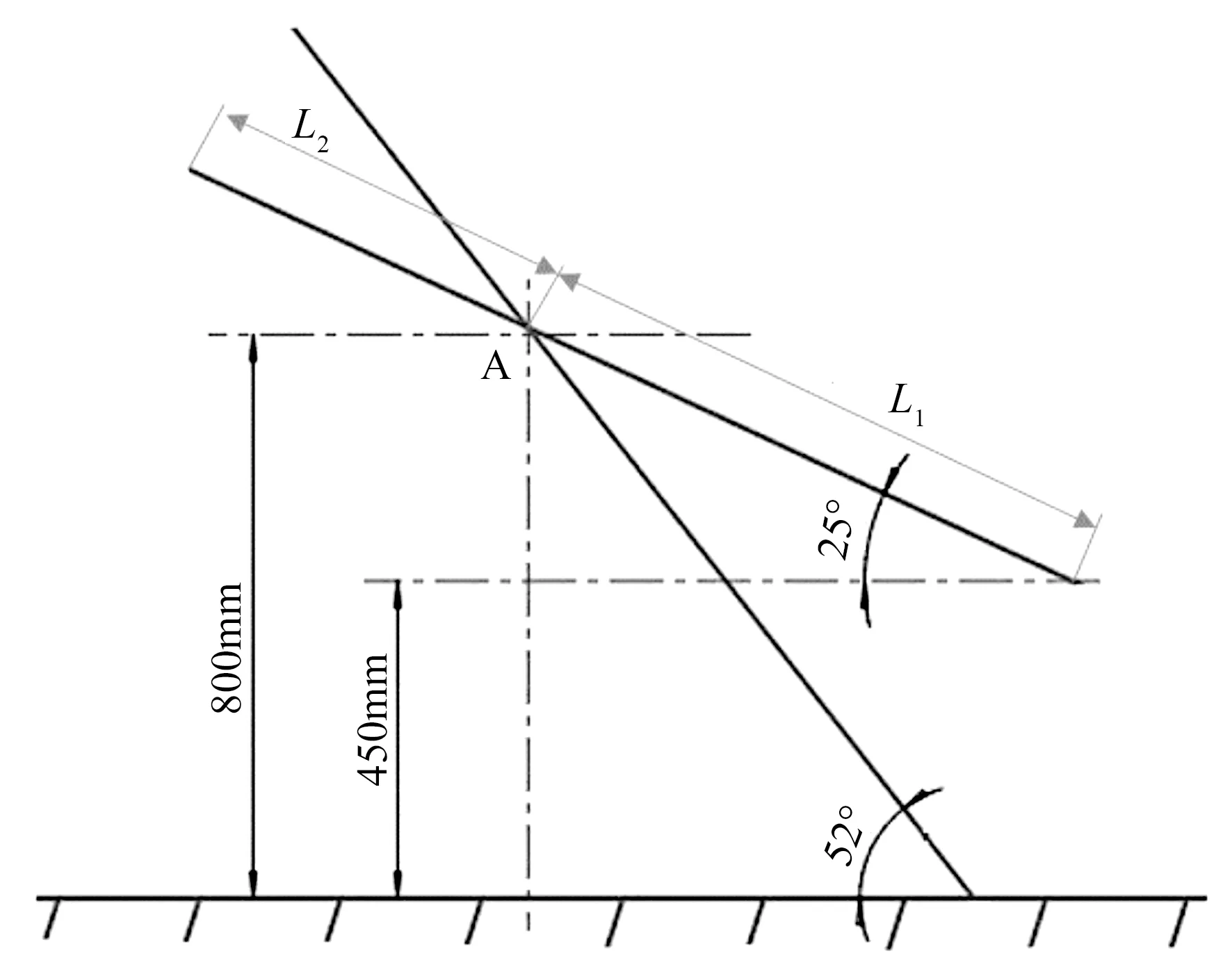
A為搭載板與承重機架鉸接處旋轉軸;L1為旋轉軸到搭載板尾部長度;L2為旋轉軸到搭載板前端長度。
由L1×sin 25°=350 mm或L1×sin 52°=800 mm得出,旋轉軸到搭載板尾部的長度L1=828 mm或1 015 mm。為了保證搭載板的靈活性和林內通過性,選取L1=828 mm,同時為了保證搭載板能滿足將木材拖拽到牽引式搭載裝置上,即L1≥1 015 mm的要求,本設計,在搭載板上設置伸縮式加長板,長度為200 mm>187 mm(1 015~828 mm),旋轉軸到搭載板前端的長度(L2)考慮搭載板的平衡性及液壓缸的安裝,選取L2=800 mm,即搭載板的長度L=L1+L2=1 628 mm。
1.2 液壓缸的選型
考慮布置、結構、工藝、成本等因素,設計選用直推式單級油缸進行舉升;根據牽引式搭載裝置的運動特點,選用2個雙作用單活塞桿液壓缸,在牽引式搭載裝置的左右兩側對稱分布。依據工作系統需要的舉升壓力,計算油缸直徑和工作行程,進行液壓缸的選型。
液壓油缸直徑計算:依據表1,典型環保型多功能集材機趟載量最大為3 m3;新伐木材平均密度為1 019 kg/m3,取1 000 kg/m3(見表2)。根據趟載量、新伐木材平均密度計算得,每個液壓缸推力Fmax=15 000 N。由公式Fmax=P(πD2/4)η得D=(4Fmax/Pπη)-1/2(η為液壓系統的效率,取0.8;P為液壓系統工作壓力,取16 MPa);經計算,液壓缸內徑D=38.6 mm,根據液壓缸選用原則,選D≥40 mm,活塞桿直徑選d=36 mm。

表2 新伐木材密度
液壓缸行程計算:S=Smax-S0(S為液壓缸行程;Smax為液壓缸達到最大行程時,液壓缸2個鉸接點之間的距離;S0為液壓缸沒有舉升時,2個鉸接點之間的距離)。由圖3可見,Smax=833 mm、S0=471 mm,經計算S=362 mm。

圖3 液壓缸極限位置示意圖
1.3 牽引力計算
由圖4可見,牽引式搭載裝置能正常集材,需要集材機施加給牽引式搭載裝置牽引力(F),F=Fm(牽引式搭載裝置與地面摩擦力)+Fn(原條與地面的摩擦力)。Fm、Fn計算公式[14-16]:
Fm=Nmμm±Gmsinγ=(Gm+KWg)(μmcosγ±sinγ);
Fn=Nnμn±Gnsinγ=(1-K)Wg(μncosγ±sinγ)。
式中:γ為斜坡角度(γ=25°);g為重力加速度(取9.8m/s2);Gm為牽引式搭載裝置所受重力(單位為N);Gn為原條所受重力(單位為N);Nm為牽引式搭載裝置所受支持力(單位為N);Nn為原條所受支持力(單位為N);μm為牽引式搭載裝置行走的阻力系數(μm=0.08);μn為木材的阻力系數(μn=0.4);K為原條分配系數(K=0.23);W為原條的質量(單位為kg)。
已知,牽引式搭載裝置的趟載量為3 m3、木材密度為1 000 kg/m3、牽引式搭載裝置的自身質量為300 kg,經計算,所需牽引力最大為F=14.2 kN。

F為牽引式搭載裝置所需牽引力;Nm為牽引式搭載裝置所受支持力;Fm為牽引式搭載裝置與地面摩擦力;Gm為牽引式搭載裝置所受重力;Nn為原條所受支持力;Fn為原條與地面的摩擦力;Gn為原條所受重力;γ為斜坡角度。
1.4 鉸接點受力分析
牽引架和承重支架之間的連接為鉸接(見圖5),為了保證工作的安全性,需要對鉸接點進行受力分析。本研究分析在最大載荷時牽引架和承重支架之間的鉸接點受力情況,根據受力平衡對鉸接點取距:
Ft·L3+Gn·L4=Nt·L5;
(1)
Gn-Ft·sinφ2-Nt=Ya;
(2)
Ft·cosφ2+Fn=Xa。
(3)
式中:Ft為液壓缸的推力(取Ft=Fmax=15 000 N);L3為搭載板與液壓缸鉸接點和搭載板與承重機架鉸接點之間的距離(取L3=310 mm);Gn為木材重量(取Gn=30 000 N);L4為搭載板與承重機架鉸接點到原條重心的水平距離(L4的取值范圍6 800~7 400 mm,為方便計算,取L4=7 000 mm);Nt為地面作用在原條尾端的支持力;L5為搭載板與承重機架鉸接點到原條尾端的距離(取L5=12 000 mm);φ2為液壓缸和斜坡的夾角;Ya為搭載板與承重機架鉸接點處垂直斜坡方向的分力;Fn為原條與地面的摩擦力(取Fn=17 000 N);Xa為搭載板與承重機架鉸接點處沿斜坡方向的分力。
由式(1)得Nt=17 887.5 N;由式(2)、式(3)可得,當φ2越小時,鉸接點受力越大,根據圖3的φ2最小為0,此時Ya=12 112.5 N、Xa=32 000 N的鉸接點所受的剪切合力為34 215.6 N。

搭載板采用45鋼結構,許用擠壓應力60 MPa;螺栓采用Q235鋼,許用擠壓應力160 MPa、許用切應力為180 MPa,計算得d0≥22 mm。
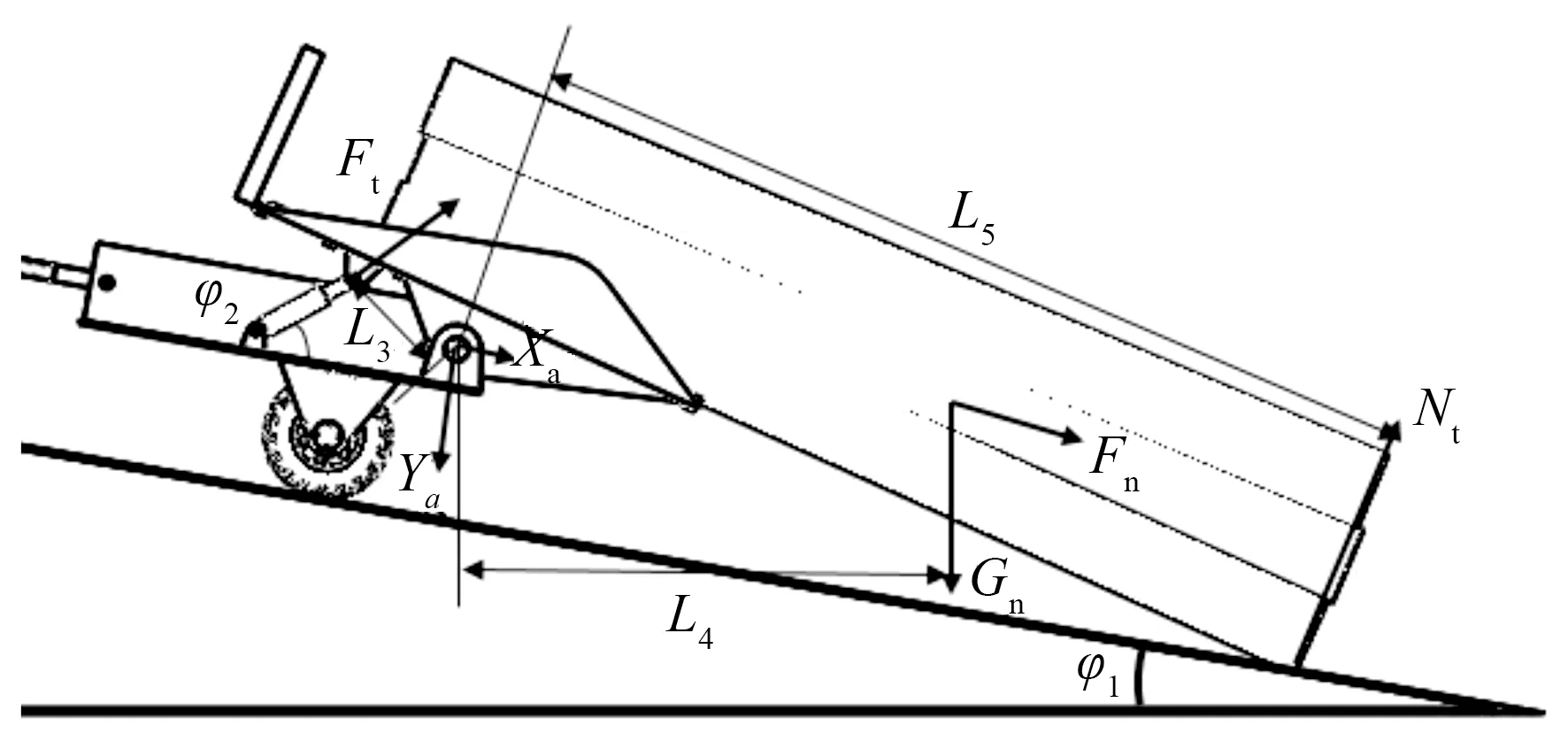
Ft為液壓缸的推力;φ2為液壓缸和斜坡的夾角;L3為搭載板與液壓缸鉸接點和搭載板與承重機架鉸接點之間的距離;Xa為搭載板與承重機架鉸接點處沿斜坡方向的分力;Ya為搭載板與承重機架鉸接點處垂直斜坡方向的分力;L5為搭載板與承重機架鉸接點到原條尾端的距離;Nt為地面作用在原條尾端的支持力;Fn為原條與地面的摩擦力;Gn為原條重量;L4為搭載板與承重機架鉸接點到原條重心的水平距離;φ1為斜坡的坡度角。
2 行駛穩定性
2.1 斜坡行駛的橫向穩定性
集材機的安全主要與集材機的橫向穩定性有關[16],在林區等崎嶇路面,橫向穩定性更是保證集材機安全工作的重要原因之一,其中集材機工作中的半數以上的安全事故與集材機和集材工具側翻有關[17],保證集材機的穩定行駛是安全工作的前提。本研究主要分析牽引式搭載裝置在斜坡上橫向勻速行駛時的橫向穩定性(見圖6)。
當牽引式搭載裝置達到側翻的臨界點時,依據受力分析圖6,對O1點求力矩G∑cosθ(0.5a+0.5c-d)-G∑sinθ·h-N1(a+0.5c)=0、N1=[G∑cosθ(0.5a+0.5c-d)-G∑sinθ·h]/(a+0.5c)。要保證牽引式搭載裝置在斜坡橫向行駛時不發生側翻,則應滿足N1≥0,即:G∑cosθ(0.5a+0.5c-d)-G∑sinθ·h≥0、θ≤arctan[(0.5a+0.5c-d)/h]。式中:G∑為牽引式搭載裝置的自重和所集原條在裝置上分配的重力的合重力;θ為斜坡坡度角;a為牽引式搭載裝置的輪距(a=1 000 mm);c為牽引式搭載裝置的輪寬(c=200 mm);d為質心偏離對稱面的距離(d=100 mm);h為質心距離地面的高度(h=900 mm);N1為支持力。
根據θ的計算公式可知,影響牽引式搭載裝置穩定性的主要參數有輪距、輪寬、質心偏距、質心高度。在實際工作工程中,輪距、輪寬是不能隨時調整的;而質心偏距、質心高度,可以在集材時通過裝載工藝實現微調。由圖7可見,隨著質心高度和質心偏距的增大,牽引式搭載裝置的穩定性逐漸降低。將相關數據帶入θ的計算公式可得,牽引式搭載裝置能夠保持穩定的最大橫向坡度角是θ=29°,大于25°,可以滿足工作需要。
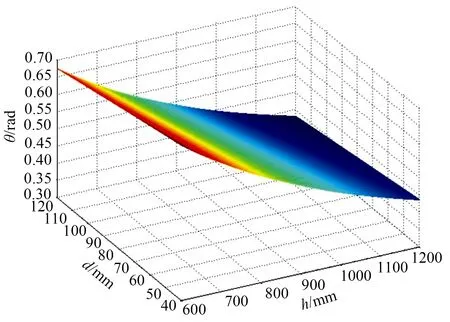
圖7 橫坡行駛最大坡度角與結構關系
2.2 橫向轉彎時的穩定性
當牽引式搭載裝置在斜坡上進行勻速橫向轉彎時,為了防止側翻,需要進行穩定性分析,求得最大行駛速度。
牽引式搭載裝置進行勻速轉彎時,所受向心力Fc=G∑v2/gR、R={[(a+c+e)2/4]+E2}-1/2、v={[gR(0.5a+0.5c-d)cosθ/h]-sinθ}-1/2。式中:e為牽引式搭載裝置的寬度(e=1 400 mm);E為牽引環至承重輪胎的距離(E=1 500 mm);計算得,牽引式搭載裝置的轉彎半徑為R=1 800 mm。
根據v的計算公式可知,影響轉彎速度的因素,主要有輪距、輪寬、質心偏距、質心高度。由圖8可見,隨著質心偏距的增大,質心高度的降低,轉彎的最大速度逐漸增大;根據數據計算得,在θ=29°的斜坡上,牽引式搭載裝置的最大轉彎速度v=10.5 km/h。
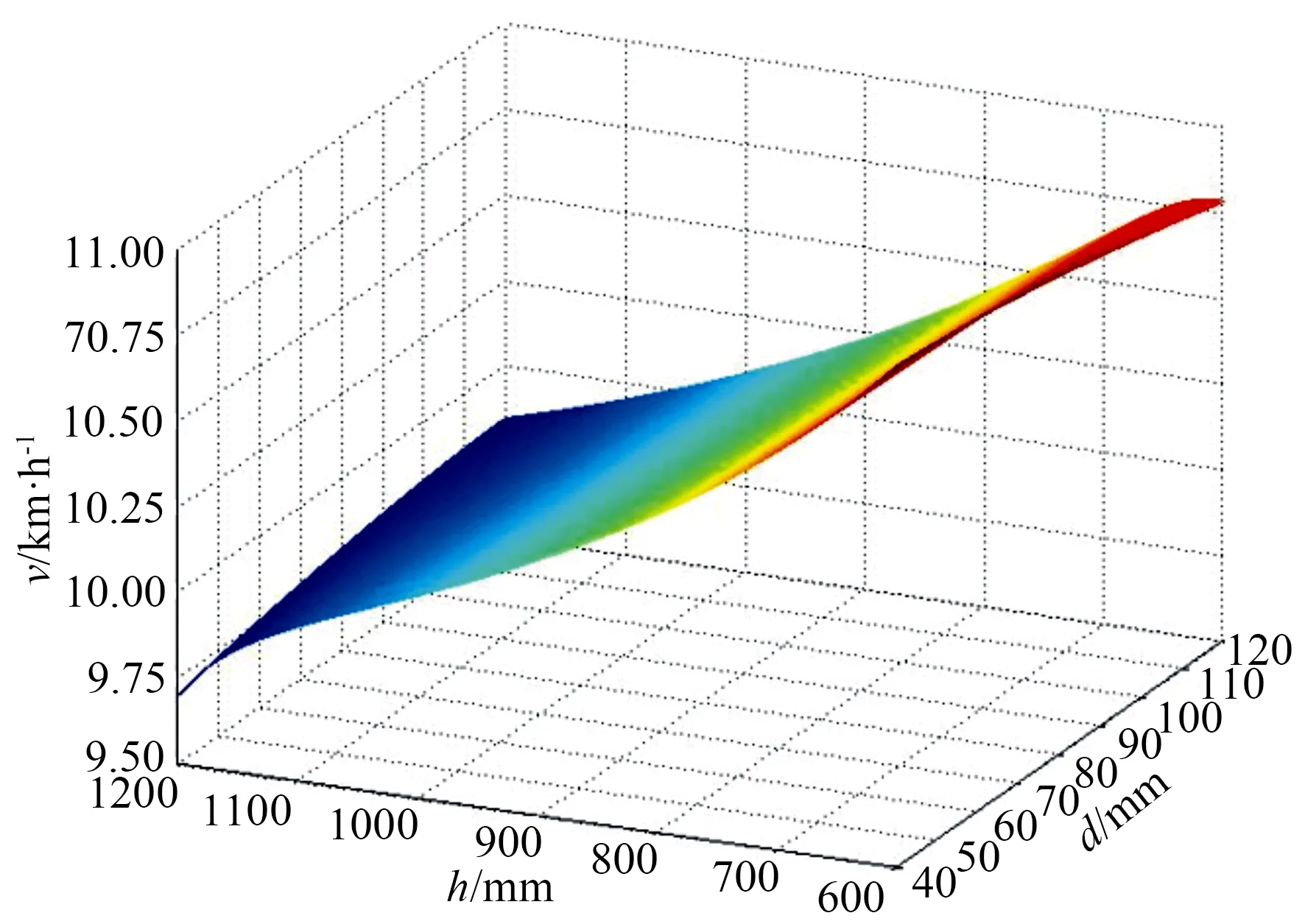
圖8 橫坡轉彎速度與結構參數關系圖
3 有限元校核與仿真
3.1 有限元校核
將模型導入solid works中,利用solid works自帶的應力分析功能,對搭載板和承重機架進行應力分析。
搭載板有限元校核:對搭載板進行約束和施加載荷,在搭載板與承重機架的鉸接處、液壓缸的安裝處進行夾具固定約束,在搭載板表面施加壓力載荷。
由圖9可見,對搭載板進行實體網格劃分,單元格大小為55.7 mm,分析得到位移云圖、應力云圖。位移云圖的最大位移為0.915 mm,應力云圖的最大應力為53.7 MPa,小于45鋼的屈服極限和許用擠壓應力,說明搭載板的設計滿足使用強度。
承重機架有限元校核:同樣對承重機架進行約束和施加載荷,得到圖10所示的應力分析云圖。由圖10可見,位移云圖的最大位移為1.853 mm,應力云圖的最大應力為56.3 MPa,小于45鋼的屈服極限和許用擠壓應力,說明承重機架的設計滿足使用強度。
3.2 舉升仿真
為了驗證牽引式搭載裝置在滿載狀態時,液壓缸的舉升工作,用機械系統動力學自動分析軟件(ADAMS)進行舉升仿真。設液壓缸10 s內完成牽引式搭載裝置的搭載板從0°到52°的舉升工作,滿載狀態集材為3 000 kg(見圖11、圖12)。
由圖11可見:在牽引式搭載裝置完成舉升的過程中,活塞的運動可以認為是呈線性變化;隨著舉升角的不斷變大,活塞將搭載板舉起,活塞的最大行程為280 mm,設計數值362 mm可以滿足工作需要。
由圖12可見:液壓缸的舉升力在舉升過程中沒有發生突變,其最大推力出現在舉升運動的初始位置,符合實際工況;最大舉升力約為14 000 N,小于設計值15 000 N,證明液壓缸的型號選擇合理,可以完成舉升工作。除此之外,在8s時,舉升力減小速度加快,說明此時所集原條在牽引式搭載裝置上已經失衡,正處于滑落狀態,證明52°的舉升角可以完成正常的卸載工作。
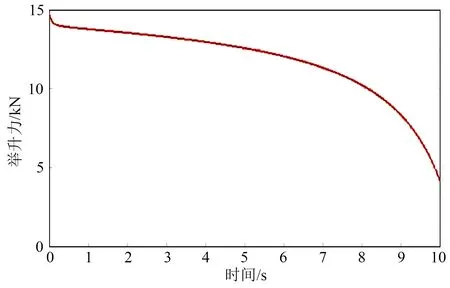
圖12 液壓缸舉升力曲線
3.3 搭載運動仿真
根據實際搭載狀況分析可知,上坡時牽引式搭載裝置受力大,容易出現運動安全事故[14,19],因此,用ADAMS軟件對牽引式搭載裝置搭載木材上坡情況進行仿真。單根原條的質量在200~500 kg之間,此處選為300 kg,牽引式搭載裝置的最大載荷為3 000 kg,選用這兩個搭載質量進行牽引式搭載裝置的上坡運動仿真;0~30 s內為平地運動,30~40 s內完成25°上坡運動,40~50 s內為坡面運動(見圖13)。由圖13可見,在上坡過程中總阻力逐漸增加,總附著力逐漸增加,牽引式搭載裝置所受的阻力出現了突變,但逐漸恢復,說明牽引式搭載裝置沒有出現安全事故,可以完成搭載運動。觀察兩幅運動仿真圖,發現仿真曲線的運動趨勢基本相同,說明牽引式搭載裝置可以完成3 000 kg的滿載運動。除此之外,在坡面運動時,牽引式搭載裝置所受的阻力,在搭載為300 kg時,相對平地運動減小;而滿載時,相對平地運動,其所受阻力增大。這種現象應該與原條在搭載集材過程中的杠桿現象有關,需要進一步研究。
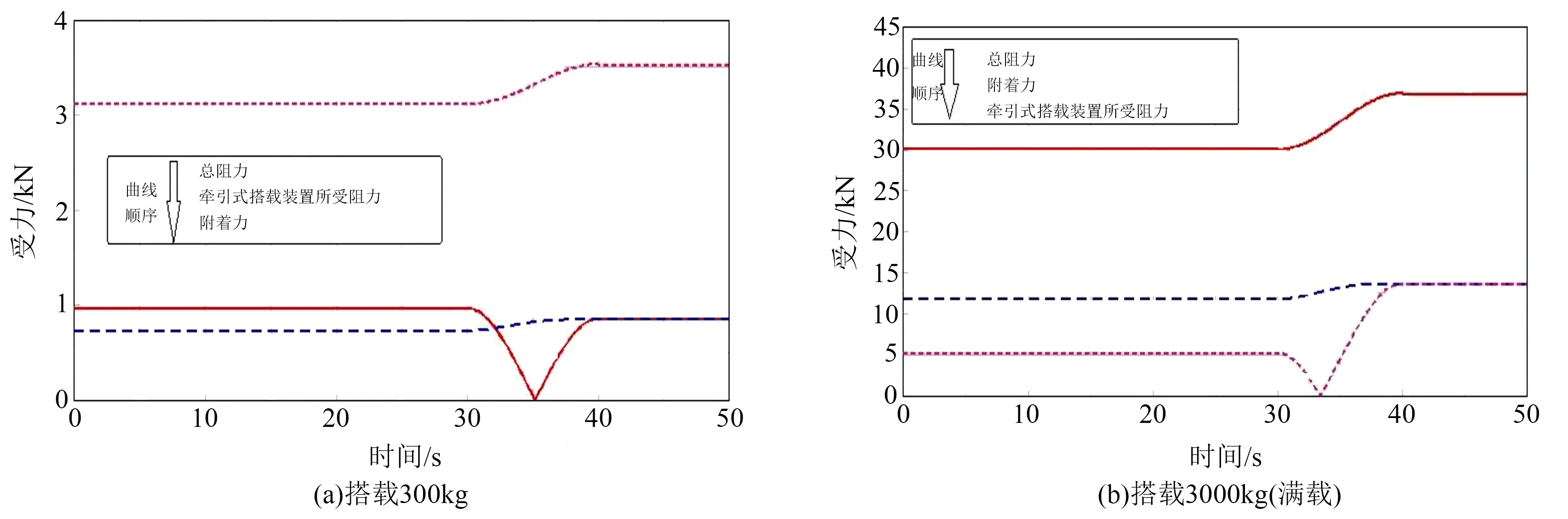
圖13 牽引式搭載裝置搭載上坡仿真
4 結論
設計的適用于環保型多功能集材機的牽引式搭載裝置,提高了集材的效率和靈活性。牽引式搭載裝置具有很好的穩定性,可以完成在橫向坡度為29°的斜坡上行駛,在橫坡上最大轉彎速度可以達到10.5 km/h;通過有限元校核和仿真,證明此設計能夠完成集材工作。該設計能基本滿足環保型多功能集材機的工作需要,可為林業機械的設計提供參考。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04