貪婪的量測劃分機制下的多傳感器多機動目標跟蹤算法
2021-07-29 03:34:06朱圣棋房云飛
電子與信息學報 2021年7期
關鍵詞:模型
楊 標 朱圣棋 余 昆 房云飛
(西安電子科技大學雷達信號處理國家重點實驗室 西安 710077)
1 引言
隨機有限集[1](Random Finite Set, RFS)自提出以來,因其優越的跟蹤性能以及較低的算法復雜度而備受關注[2]。多目標多伯努利(Multi-target Multi-Bernoulli, MeMBer)濾波器[1]是基于RFS理論的一種有效的多目標跟蹤濾波器,其能夠有效地對多目標的個數和狀態進行有效地估計。但是傳統的MeMBer濾波器只能對(線性和非線性系統下)具有單一運動模式的目標進行跟蹤,一旦目標具備較強的機動特性,傳統的MeMBer濾波器便會難以為繼。因此,在MeMBer濾波器的基礎上,國內外學者進行了大量的研究[3–5]和改進。
在機動目標跟蹤領域,交互式多模型[6,7](Interacting Multiple Mode, IMM)策略是一種高效的機動目標狀態預測方法。其首先利用當前的量測信息對模型概率進行預測更新;再利用更新后的模型概率和得自不同模型的目標狀態預測值,對機動目標的狀態進行加權混合估計;最終達到對機動目標狀態正確預測的目的。IMM策略常常作為一種有效的機動目標狀態預測方法嵌入多目標跟蹤算法[8,9]中,以達到對多個機動目標的個數、狀態進行有效的估計,并輸出各個目標航跡的目的。
對于低檢測概率目標的跟蹤問題,最為直接有效的方法為多個傳感器共同檢測,所以多傳感器多目標跟蹤算法在微弱目標跟蹤領域扮演著重要的角色。文獻[10,11]介紹了廣義的多傳感器(Multi-Sensor, MS)概率假設密度(Probability Hypothesis Density, PHD)濾波器,但是因其具有較大的算法復雜度而難以實現。所以在文獻[12,13]提出了一種復雜度較低的迭代校正(Iterative Correction, IC)策略下的多傳感器PHD和多傳感勢平衡概率假設密度(Cardinality balance Probability Hypothesis Density, CPHD)濾波器,但算法復雜度仍舊較高。最近,文獻[14,15]通過提出貪婪的量測劃分策略,提出了一種計算上近似實現的多傳感器CPHD濾波器和多傳感器MeMBer濾波器,極大地提高了多傳感器多目標跟蹤算法的運算效率。
現代軍事中,往往對低檢測概率(如隱形飛機,雷達散射截面RCS小的目標等)下高機動目標跟蹤算法的要求極高,因此針對低檢測概率下高機動目標跟蹤算法的研究具有重要的意義。本文利用IMM策略、MeMBer濾波器以及基于貪婪的量測劃分策略的多傳感器技術提出了一種新的交互式多傳感器多目標多伯努利(Interacting Multiple Mode Multi-Sensor Multi-target Multi-Bernoulli filter,IMM-MS-MeMBer)濾波器,并與傳統的基于迭代校正方法下的交互式迭代校正多傳感器多目標多伯努利(Interacting Multiple Mode Iterative Correction Multi-sensor Multi-target Multi-Bernoulli filter, IMM-IC-MeMBer)濾波器、基于單模型下的多傳感器多目標多伯努利濾波器(Multi-Sensor Multitarget Multi-Bernoulli filter base on Constant Velocity model, CV-MS-MeMBer)、交互式單傳感器多目標多伯努利(Interacting Multiple Mode Single Sensor Multi-target Multi-Bernoulli Filter, IMMSS-MeMBer)濾波器進行對比。驗證了雜波環境中,所提IMM-MS-MeMBer濾波器對多個低檢測概率高機動目標的優良跟蹤性能以及其在運算效率上的優勢。
2 系統模型
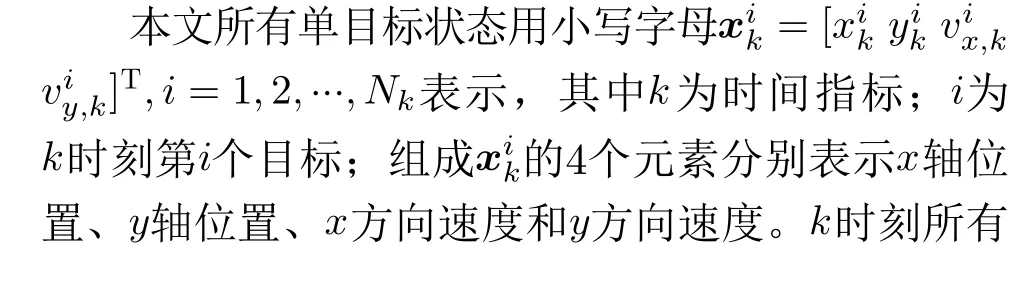
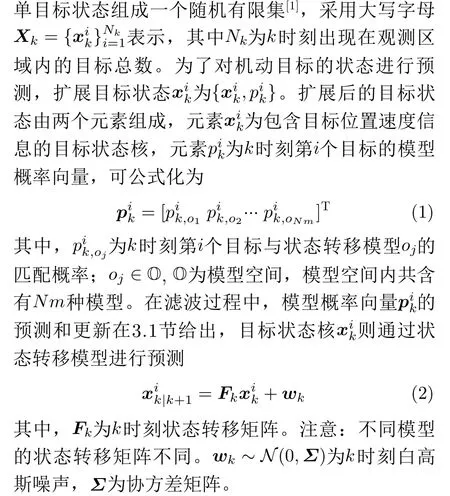
2.1 動態模型
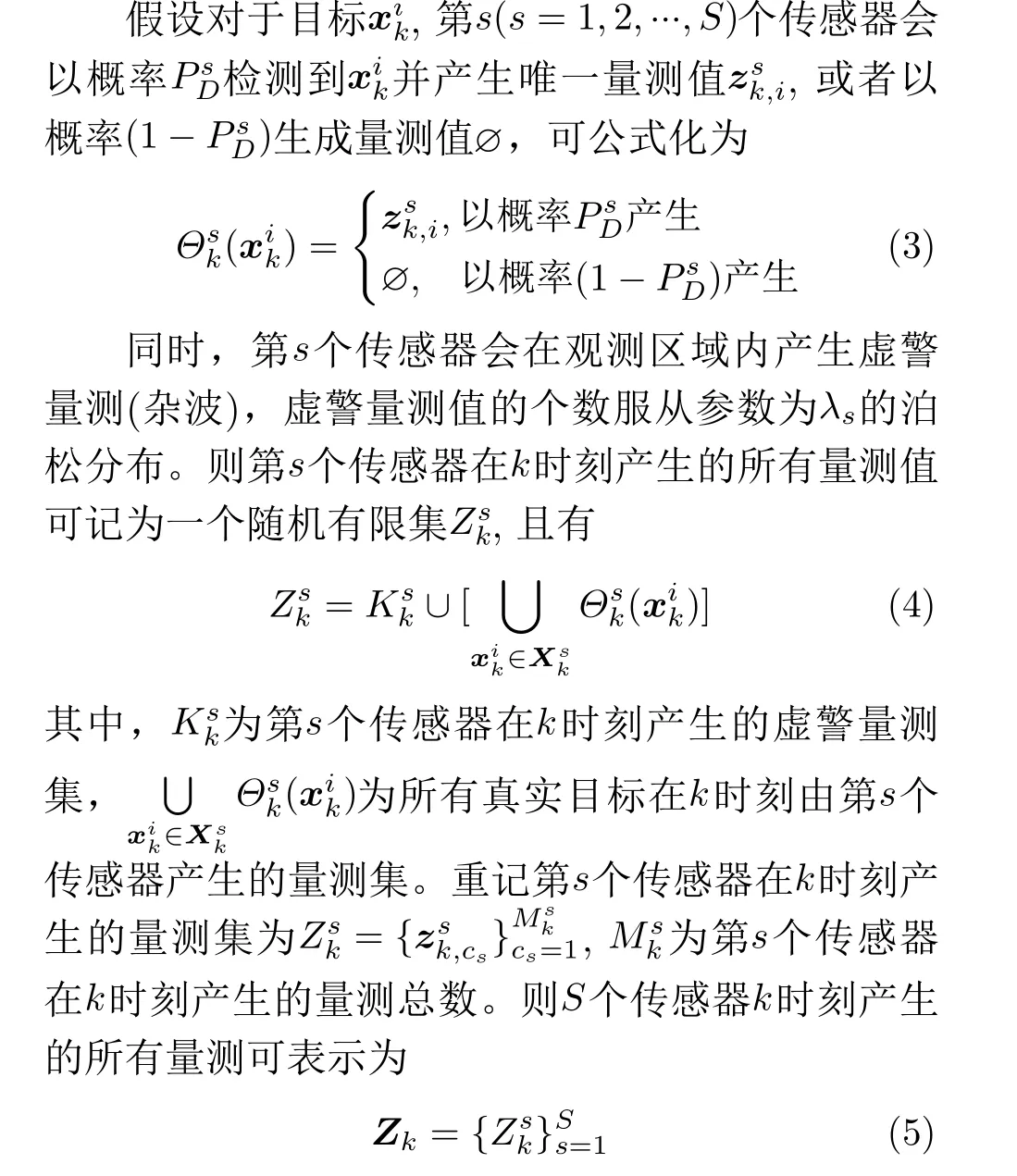
2.2 多傳感器量測模型
3 貪婪的多傳感器量測劃分
貪婪的多傳感器量測劃分算法主要分為以下5步:

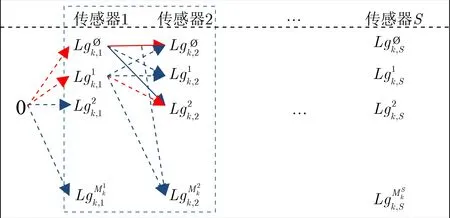
圖1 貪婪的多傳感器量測選擇
4 交互式多傳感器多伯努利粒子濾波算法
本節在IMM算法、貪婪的多傳感器量測劃分、傳統的MeMBer濾波器的基礎上,推導了一種新的IMM-MS-MeMBer濾波器。
4.1 IMM-MS-MeMBer預測
4.2 IMM-MS-MeMBer更新
k時刻目標的個數估計為
5 數值實驗
5.1 實驗環境
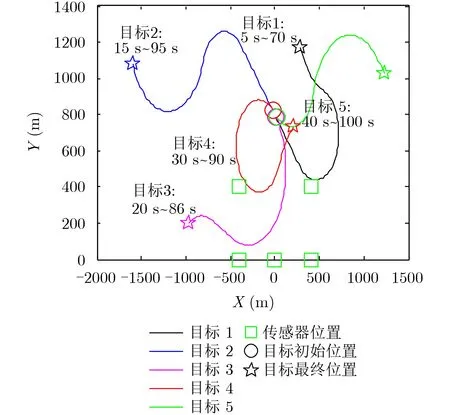
圖2 真實目標軌跡
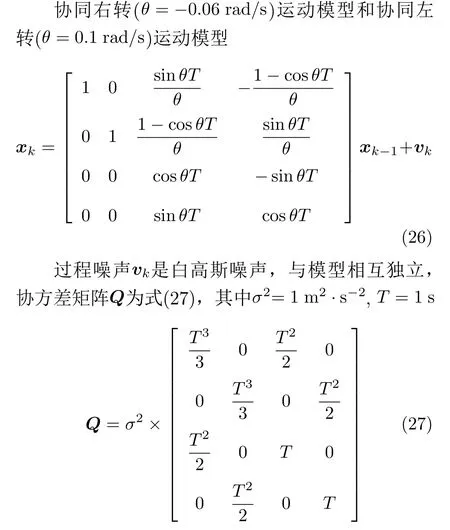
在模型概率預測中,模型間轉移考慮為隨機的,認為各個模型間相互轉移的概率相同,所以實驗中模型轉移概率矩陣設置為

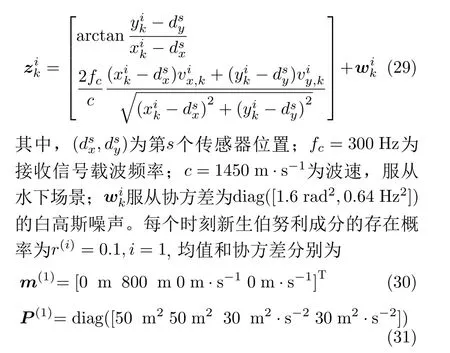
實驗中共設置S=5個傳感器,位置分別為[0,0], [-400,-400], [400,400], [-400,0]和[400,0],量綱為m。傳感器量測模型[15]為
5.2 實驗結果分析
圖3和圖4分別為傳感器檢測概率PD=0.5, 雜波率λ=8時,IMM-MS-MeMBer濾波器對多機動目標的位置和速度估計效果圖。由圖3和圖4可以看出本文所提IMM-MS-MeMBer濾波器能夠在雜波環境中,實現對多機動目標位置和速度的估計。
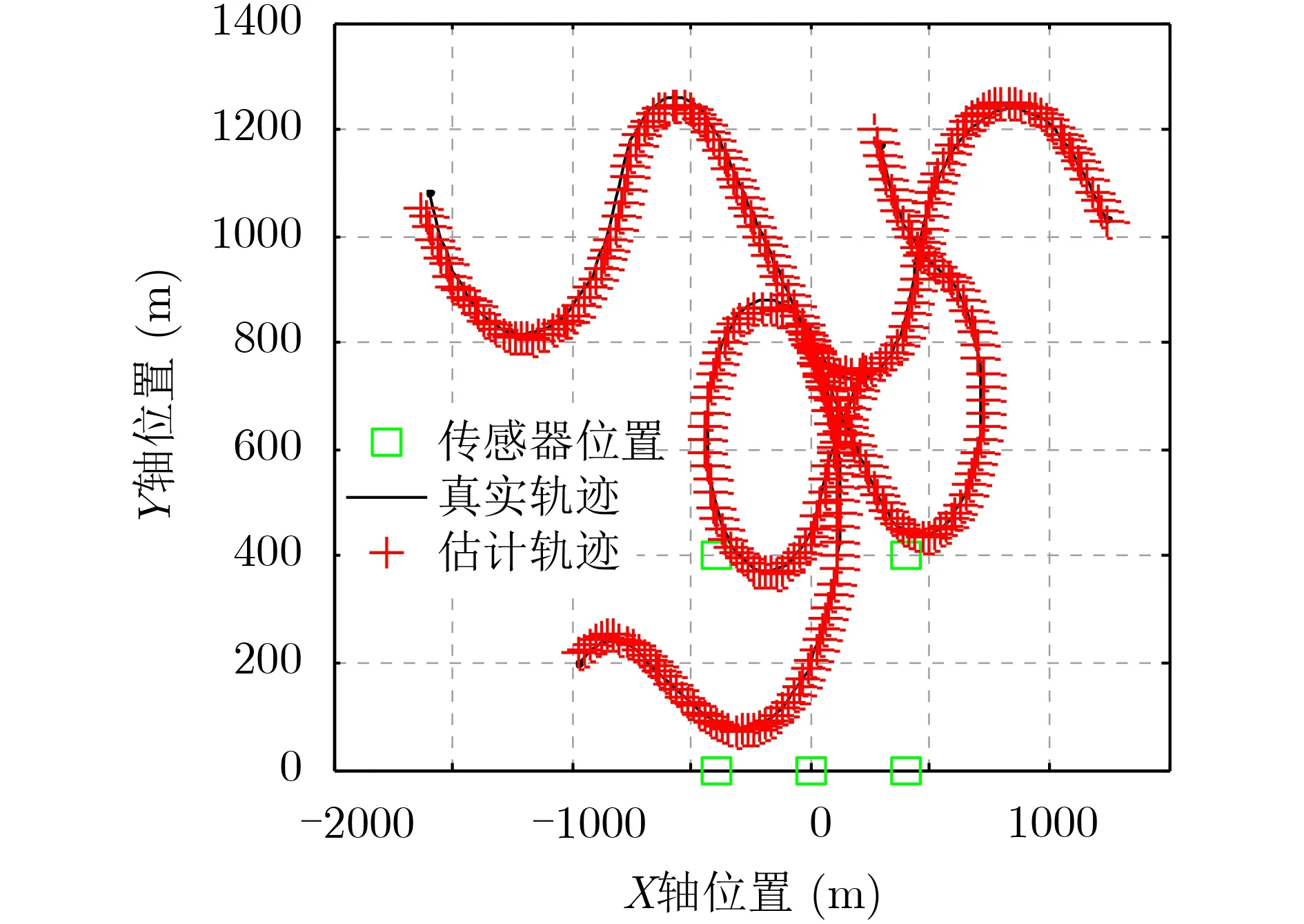
圖3 多機動目標位置估計
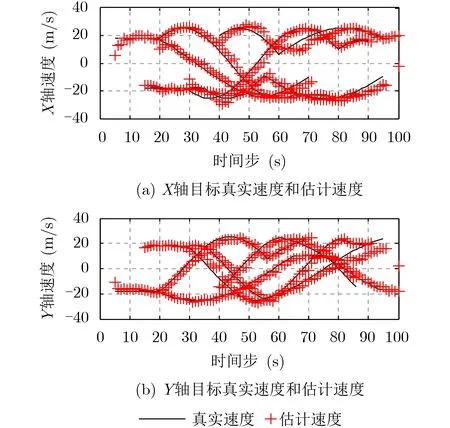
圖4 多機動目標速度估計
表1給出了圖5、圖6和圖7中圖例的說明。圖5的圖例中,0代表真實機動目標的個數。圖5和圖6分別為不同算法、不同條件下多機動目標個數的估計、OSPA誤差估計圖。通過觀察圖5和圖6,可得:(1)本文所提IMM-MS-MeMBer濾波器在不同雜波率下都能夠有效地實現對多機動目標個數的估計,當目標新生和死亡時,不同雜波率下IMMMS-MeMBer濾波器都會出現OSPA距離誤差峰值。同等條件下,IMM-MS-MeMBer濾波器比IMM-MS-CPHD濾波器對目標狀態和個數的估計性能好,估計得到的OSPA距離誤差更小,這是因為IMM-MS-MeMBer濾波器對目標狀態提取時不需要對粒子進行聚類,而IMM-MS-CPHD濾波器則需要通過聚類算法來提取目標狀態,濾波器性能的好壞受到了聚類算法的影響;(2)在同等條件下,隨著時間推移,單模型下CV-MS-MeMBer濾波會因為機動目標狀態估計中的模型失配問題,逐漸丟失目標,所以不能得到正確的目標個數估計,OSPA距離誤差也會隨著時間的推移越來越大。相較于單模型下CV-MS-MeMBer濾波,IMM-MSMeMBer濾波則能夠有效解決單模型下因模型失配造成的目標丟失問題;(3)當檢測概率較低(如PD=0.5和PD=0.7)時,IMM-SS-MeMBer濾波器根本無法對多個機動目標的狀態形成有效的估計,隨著時間的推移,目標個數估計性能會急劇惡化,OSPA距離誤差也會急劇增大。但是隨著檢測概率提升,IMM-SS-MeMBer濾波器對目標個數的估計性能會逐漸逼近正確值。相較于IMM-SS-MeMBer濾波器,在PD=0.5時,本文所提IMM-MSMeMBer濾波器則能夠準確地估計多機動目標的個數,且具有較小的OSPA距離誤差。說明了本文所提IMM-MS-MeMBer濾波器能夠解決目標低檢測概率難以跟蹤的問題;(4)相同條件下,與傳統的多傳感器IMM-IC-MeMBer濾波器相比,IMM-MSMeMBer濾波器在對多機動目標個數的估計上也能達到理想的效果且相對稍加穩定,在OSPA距離誤差上,IMM-MS-MeMBer濾波器明顯更小,說明相同條件下IMM-MS-MeMBer濾波器具備更加優越的性能。
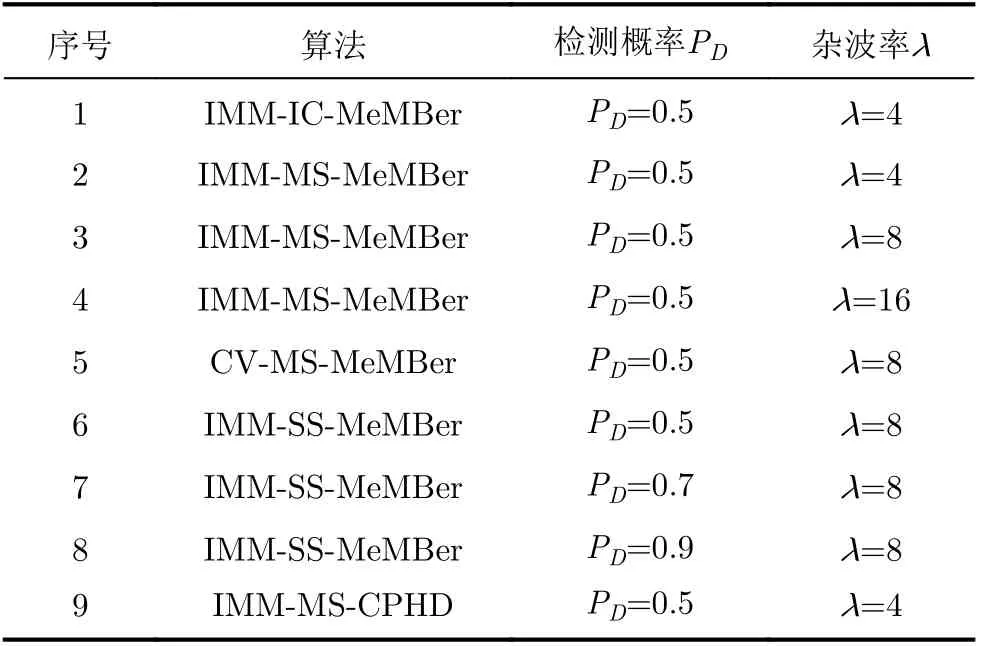
表1 圖5、圖6和圖7中圖例的含義說明
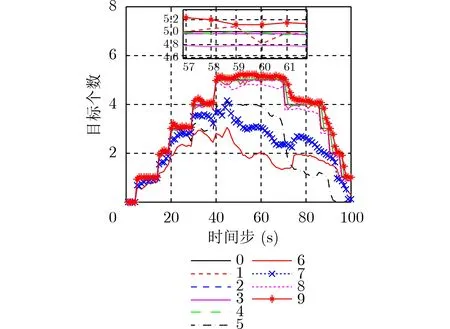
圖5 多機動目標個數的估計
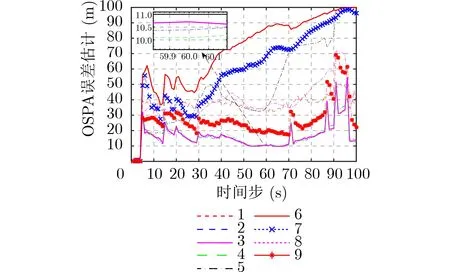
圖6 多機動目標OSPA誤差距離估計
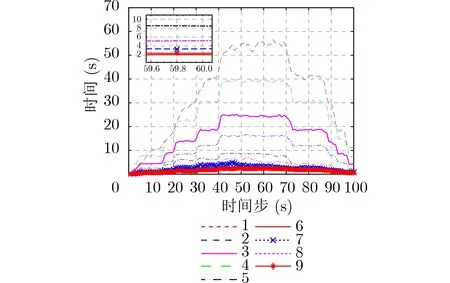
圖7 不同條件不同算法運算復雜度統計
通過圖7對不同條件下不同算法運行時間的統計,可以看出相較于傳統的IMM-IC-MeMBer濾波器,本文所提的IMM-MC-MeMBer濾波器在計算復雜度上得到了極大的改善;由于引入了IMM算法對機動目標的狀態進行預測,所以相較于單模型下的CV-MS-MeMBer濾波器,本文所提的IMMMC-MeMBer濾波器需要更大的運算量,但是相較于性能方面的提升,計算復雜度的提升是可以接受的;此外,結合IMM算法和貪婪的量測劃分算法可以得到IMM-MS-CPHD濾波器。IMM-MSCPHD濾波器相較于IMM-MC-MeMBer濾波器具有較低的運算復雜度,這是因為本質上IMM-MSCPHD濾波器與IMM-MC-MeMBer濾波器的機理是完全不同的,IMM-MS-CPHD濾波器會對每個時刻的粒子總數進行約束,它能夠隨著時間的迭代保持一個穩定的復雜度。但是IMM-MC-MeMBer濾波器中的伯努利成分則會隨著時間的迭代呈指數性增長,即使預先設定了伯努利成分個數的上限,算法的運算花費也會隨著時間的迭代而達到一個峰值才能保持穩定。
6 結論
本文提出一種新的IMM-MS-MeMBer濾波器,并通過數值實驗得到了以下結論:第一,IMMMS-MeMBer濾波器通過引入當前量測信息對目標的運動狀態進行多模加權估計,從而解決了機動目標的狀態預測問題;第二,IMM-MS-MeMBer濾波器通過貪婪的量測劃分策略實現了量測的有效劃分,進而有效地解決了目標的低檢測概率能以檢測和跟蹤問題;第三,IMM-MS-MeMBer濾波器能夠在雜波環境中利用角度和多普勒信息實現對目標的位置和速度的聯合估計;第四,IMM-MS-MeMBer濾波器相對于IMM-IC-MeMBer濾波器,極大地提高了多傳感器多機動目標算法的運算效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19