吊重擺長對起重機PID防搖控制的影響
2021-07-29 02:07:28龐振華
科學技術與工程 2021年14期
關鍵詞:模型
龐振華,劉 放,吳 濤 ,唐 語
(西南交通大學機械工程學院,成都 610031)
當前,隨著自動化的快速發展,起重機的防搖技術成為科學研究的發展方向。目前防搖領域主要分為兩部分,包括機械防搖和電子防搖。
機械防搖主要通過設計起重機的機械結構達到防搖的目的。目前,在機械防搖領域,任昭鵬[1]采用一種基于三索限位的機械式防搖擺裝置;吳俊杰等[2]提出一種吊盤式機械防搖方案;在電子防搖領域,Lee[3]提出高速負載提升的架空行車防搖擺控制新方法,研究結果表明,上述防搖方式能有效地抑制吊重的擺動。呂錦超等[4]提出了分別控制小車位置、重物擺角的小車-集裝箱系統防搖控制方案;李松等[5]提出利用模糊算法與PID控制相結合構成起重機防擺系統;付子義等[6]提出應用最優迭代學習控制的方法,實現對系統的定位以及防搖精確控制;Kawai等[7]提出了一種用于集裝箱起重機的帶有圖像傳感器的防擺系統;Yamamot等[8]提出了一種用于定速起重機的簡單防擺控制算法;Caporali等[9]提出使用計算機視覺跟蹤和自適應粒子濾波來控制閉環中的防晃動,梁利華等[10]研究了電液負載仿真臺。
為了提高起重機的工作效率,本文研究了在PID控制器的作用下,影響吊重擺角的因素。采用拉格朗日方程推導動力學模型并對其進行一定簡化,最后得出系統的狀態方程。通過仿真和試驗得出不同擺長的情況下,吊重在控制器下的擺角變化。
1 起重機動力學簡化模型
1.1 建立抽象模型
起重機運動模型如圖1所示,主要由小車、吊重、擺桿及橫梁組成。小車在橫梁上通過驅動力F可以來回運動,小車與橫梁之間存在阻尼。吊重在小車運動期間可以自由擺動,此處忽略擺動時產生的阻尼。將水平向右設置為小車的正方向,中心線右側設置為擺角的正方向。

m1為小車質量;m2為重物質量;c為小車與橫梁之間的阻尼系數,x為小車的位移,F為小車所受的驅動力;l為吊重長度;θ為重物的角位移圖1 起重機抽象模型Fig.1 Crane abstract model
1.2 起重機動力學數學模型
起重機運動模型為欠驅動機構,上述抽象模型包含兩個自由度:擺動自由度和水平自由度;小車為驅動機構。定義小車的水平位移x,和吊重擺動角度θ作為該系統的兩個廣義坐標變量。
系統所受的外力有兩種:小車自身的驅動力F和在運動過程中產生的阻尼力cv。由廣義坐標變量可建立拉格朗日方程:
(1)
式(1)中:由于起重機系統為2自由度模型,故qi(i=1,2)為兩個廣義坐標變量;q1為是小車的位移x,q2為重物擺動角度θ;Qi為系統廣義力,由小車位移x建立拉格朗日方程時Qi=F;L為Lagrange函數,它是系統動能V和勢能U之差,L=V-U;D為耗散函數:
(2)
由運動合成定理求出重物運動速度:

(3)
則系統動能V為

(4)
選取重物最低點作為勢能零點,系統勢能U為
U=m2g(l-lcosθ)
(5)
將結果代入拉格朗日方程[式(1)]得

(6)
將式(6)寫為矩陣形式:
(7)
由于在運動過程中擺角比較小,因此可將式(7)方程進行一定簡化:
sinθ≈θ;cosθ=1;sin2θ=0。
化簡后的矩陣為

(8)
通過化簡后的矩陣可得出系統的狀態方程和輸出方程:
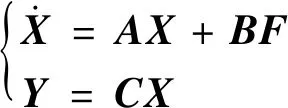
(9)
式(8)中:
矩陣C通過所需的輸出量決定。
2 控制算法及原理
PID控制器是一種閉環控制器,它根據給定值ri與實際值輸出值yo構成控制偏差:
er=ri-yo
(10)
PID控制規律為

(11)
式(11)可以寫為

(12)
式(12)中:kp為比例增益;ki為積分增益;kd為微分增益。
PID控制算法通過系統的反饋信號對系統的穩定性進行調節。在起重機運動模型中,將吊重的擺動角度作為反饋信號,驅動力F作為輸出信號。通過控制驅動力的變化控制小車的速度從而達到防搖的目的。圖2表示系統的控制框圖。

圖2 仿真模型控制框圖Fig.2 Simulation model control block diagram
3 MATLAB仿真及數據分析
通過MATLAB中的Simulink模塊建立仿真模型。將仿真參數帶入上述動力學方程可得出擺角運動狀態。仿真參數由表1給出。
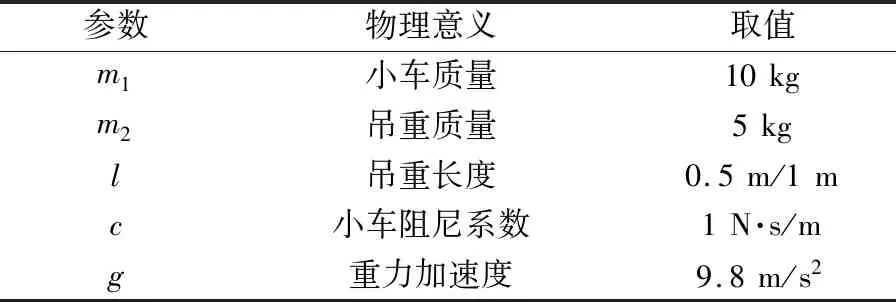
表1 仿真參數表Table 1 Simulation parameter table
本次仿真的工況為小車加速到0.17 m/s之后,讓小車減速并停止。仿真分析包含4種情況。第一,當擺長為0.5 m時,撤掉驅動力小車由于阻力的原因自動停止,并觀察吊重擺動角度的變化。第二,當擺長為0.5 m時,通過PID控制器控制小車的停止,并觀察吊重擺動角度的變化。第三,當擺長為1 m時,撤掉驅動力小車由于阻力的原因自動停止,并觀察吊重擺動角度的變化。第二,當擺長為1 m時,通過PID控制器控制小車的停止,并觀察吊重擺動角度的變化。
3.1 擺長為0.5 m時的仿真結果
圖3為吊重擺長為0.5 m時,小車由于阻尼的存在進行減速運動過程中吊重的擺動狀態。圖3表明吊重擺動的最大角度為0.08 rad,擺動角度隨時間逐漸減小。在t=50 s時,擺角減小到0.04 rad。由圖3可以看出,最大擺角的減小趨勢接近線性。
圖4為采用PID控制器之后吊重擺動角度的變化。最大擺角出現在第一次波谷,擺角大小約為0.05 rad。隨著時間的增加,最大擺角大幅度減小,第二次波谷值為0.02 rad,相比第一次幅值減小了0.4倍。當t=7 s,吊重停止擺動,在7 s內吊重總共擺動了6次,前兩次擺動幅度較大,之后擺角較小。7 s之后小車和吊重都停止擺動。

圖3 擺長為0.5 m時吊重擺長自由停擺Fig.3 Free hanging of hoist(l=0.5 m)
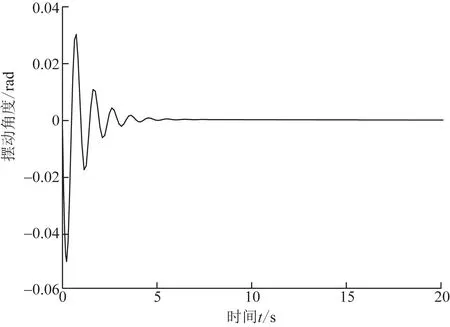
圖4 PID控制吊重擺角變化Fig.4 Change of hoist swing angle of PID control
3.2 擺長為1 m時的仿真結果
圖5表明當撤去外力之后,吊重擺角最大為0.05 rad,50 s之后擺角減小到0.02 rad。在50 s內吊重總共擺動了31次,每次幅度逐漸減小。
圖6表示在擺長為1 m的情況下,當恒定消失之后,通過控制器控制小車的停止及吊重擺動的變化。在控制器的作用下,吊重最大擺角出現在第一次波谷約為0.035 rad。出現第二次波谷時擺角相比第一次減小一半。吊重停擺的時長總共約為13 s,在此期間吊重擺動次數為8次。

圖5 擺長為1 m時吊重擺長自由停擺Fig.5 Free hanging of hoist(l=1 m)

圖6 PID控制吊重擺角變化Fig.6 Change of hoist swing angle of PID control
3.3 仿真結果數據對比分析
通過仿真分析可以得出,當吊重擺長為0.5 m時,吊重自由停擺的角度最大為0.07 rad,吊重擺動周期約為0.9 s。當吊重擺長為1 m時,吊重自由停擺的角度最大為0.05 rad,吊重擺動周期約為0.7 s。吊重擺長越長,擺動角度越小,擺動周期越大。
在PID算法控制下,當擺長為0.5 m時,吊重停擺所需時間為7 s,最大擺角約為0.05 rad,擺動次數約為6次。當擺長為1 m時,吊重停擺所需時間為13 s,最大擺角約為0.035 rad,擺動次數約為8次。吊重擺長越長,在控制器的作用下,最大擺角越小;達到穩定狀態的時間越長;停擺之前擺動的次數越多。
4 試驗驗證及數據分析
驗證仿真結果的真實性,搭建簡易的試驗平臺測量試驗數據。試驗平臺主要由CPU,伺服電機,小車,吊重及編碼器組成如圖7所示。伺服電機提供小車的驅動力,編碼器連接在吊重鉸點上測量擺動角度。控制器CPU由STM32F103組成,CPU通過發出PWM波控制電機的轉動,調節PWM波的頻率可以調節電機的轉速。CPU同時還可以實時采集編碼器反饋的數據并將數據傳輸給上位機。進行防搖控制時,將采集的數據經過PID控制算法,改變電機轉速從而達到防搖的目的。
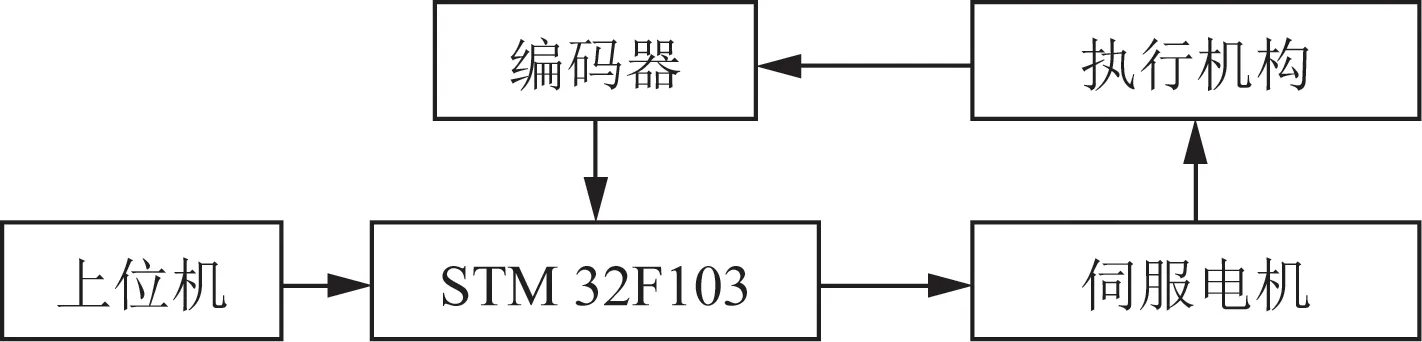
圖7 試驗臺示意圖Fig.7 Schematic diagram of test bench
4.1 擺長為0.5 m時的試驗數據
圖8為當擺長為0.5 m時,試驗臺自由停擺及防搖時的吊重擺動角度。曲線1為吊重自由停擺時的曲線圖,其最大擺角約為8°,隨著時間的增加,由于阻尼的存在擺角逐漸減小。當t=45 s時,擺動角度減小到1°,在此期間,吊重擺動了35次。在數據采集過程中因為存在干擾,故最大擺角存在一些波動。
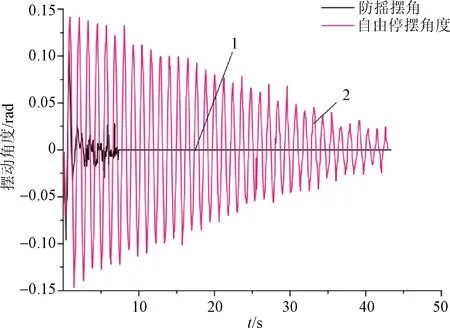
圖8 擺長0.5 m試驗數據Fig.8 Test data of pendulum length of 0.5 m
曲線2代表采用PID算法進行防搖控制的吊重擺動曲線圖。加入控制算法之后,吊重最大擺角減小為6°。經過第一個周期之后,吊重的擺角快速降低為1.5°。在之后的5 s內吊重擺角逐漸減小到0。在防搖過程中,由于干擾的作用,擺角出現了3次奇異的波動。整個防搖過程大約用時7 s,相比于自由停擺大大縮短了時間。
4.2 擺長為1 m時的試驗數據
圖8為擺長1 m時吊重自由停擺和防搖停擺的試驗對比圖。曲線1為吊重自由停擺時的曲線圖,其最大擺角約為6°,之后擺角逐漸 減小。當t=45 s時,擺動角度減小到4°,在此期間,吊重擺動了28次。
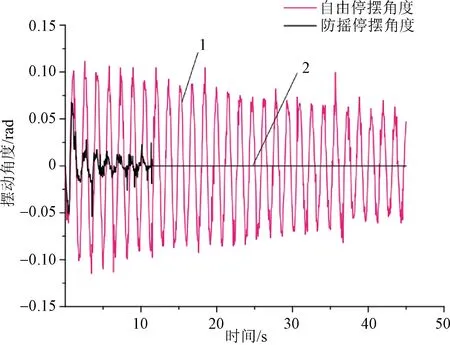
圖9 擺長1 m試驗數據Fig.9 Test data of pendulum length of 1 m
曲線2代表采用PID算法進行防搖控制的吊重擺動曲線圖。加入控制算法之后,吊重最大擺角減小為4°。經過第一個周期之后,吊重的擺角快速降低為1.5°。整個防搖過程大約用時12 s。
4.3 試驗結果對比分析
由試驗數據可以看出,加入PID控制器可以有效的降低吊重的擺動角度,并且可以大大縮短吊重停擺所需的時間。吊重的擺長會影響吊重擺動的最大角度,擺動周期以及停擺的時間,同時當加入PID控制算法之后,會影響控制吊重停擺的時間。
5 結論
(1)起重機在停擺過程中,通過PID控制器可以有效的降低停擺過程所需的時間。
(2)增加擺長的長度可以有效的減小吊重的最大擺動角度。
(3)減小擺長的長度可以減小吊重自由停擺和防搖控制停擺的時間。
在起重機防搖應用中,應當根據實際情況合理調節吊重的擺長以適應工程當中的應用環境。
在接下來的工作中研究變繩長下,控制器參數自適應調整算法。通過該算法獲得在滿足工程應用的條件下,通過該算法可以實時整定控制器參數,從而有效的降低防搖控制時間及最小擺動角度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19