自動(dòng)駕駛履帶車輛魯棒自適應(yīng)軌跡跟蹤控制方法
2021-07-29 03:04:08李睿項(xiàng)昌樂王超范晶晶劉春林
兵工學(xué)報(bào) 2021年6期
關(guān)鍵詞:方法
李睿,項(xiàng)昌樂,王超,范晶晶,劉春林
(1.北京理工大學(xué) 機(jī)械與車輛學(xué)院,北京 100081;2.中國(guó)北方車輛研究所 總體技術(shù)部,北京 100072;3.中國(guó)北方車輛研究所 底盤部件技術(shù)部,北京 100072;4.北方工業(yè)大學(xué) 城市道路交通智能控制技術(shù)北京市重點(diǎn)實(shí)驗(yàn)室,北京 100144)
0 引言
履帶車輛是陸戰(zhàn)裝備體系的重要組成部分,隨著裝備智能化的持續(xù)發(fā)展,履帶車輛必然向無人化、自動(dòng)化、智能化方向轉(zhuǎn)型升級(jí),構(gòu)成未來空、天、云、地、網(wǎng)一體化作戰(zhàn)體系中的重要環(huán)節(jié)。因此,履帶車輛運(yùn)動(dòng)控制系統(tǒng)的性能是保證自動(dòng)駕駛履帶車輛完成作戰(zhàn)任務(wù)的重要保障。然而實(shí)現(xiàn)履帶車輛自動(dòng)駕駛面臨如下難點(diǎn):1)履帶車輛本身是典型的多輸入多輸出、非完整、強(qiáng)非線性系統(tǒng),且質(zhì)量大、運(yùn)動(dòng)慣性大,動(dòng)力學(xué)與運(yùn)動(dòng)學(xué)模型相互耦合,難以表征;2)履帶車輛一般工作在野外環(huán)境,地面崎嶇不平且松軟程度不同,履帶與地面相互作用構(gòu)成剛-柔耦合非線性系統(tǒng),履帶相對(duì)于地面存在側(cè)滑、滑移、滑轉(zhuǎn)等,難以精確實(shí)時(shí)測(cè)量;3)實(shí)現(xiàn)高精度軌跡跟蹤還需充分考慮未建模動(dòng)態(tài)、參數(shù)擾動(dòng)、執(zhí)行器飽和輸入及外界隨機(jī)干擾等不確定因素。因此,研究自動(dòng)駕駛履帶車輛的高精度軌跡跟蹤控制方法,是應(yīng)對(duì)未來陸戰(zhàn)裝備無人化、自主化的必由之路,具有重要的學(xué)術(shù)意義和應(yīng)用價(jià)值。
針對(duì)傳統(tǒng)履帶車輛的運(yùn)動(dòng)控制問題,國(guó)內(nèi)外學(xué)者目前已做了大量研究工作。文獻(xiàn)[1]分析了電子差速履帶車輛轉(zhuǎn)向動(dòng)力學(xué)和運(yùn)動(dòng)學(xué),提出了一種電子差速履帶車輛轉(zhuǎn)向神經(jīng)網(wǎng)絡(luò)PID控制方法,并通過不同轉(zhuǎn)向工況下的實(shí)車實(shí)驗(yàn)驗(yàn)證了該方法在低速轉(zhuǎn)向時(shí)具有良好的操控性能。文獻(xiàn)[2]提出了雙電機(jī)耦合驅(qū)動(dòng)履帶車輛自適應(yīng)滑模轉(zhuǎn)向控制方法,該方法將車速控制和轉(zhuǎn)向控制進(jìn)行解耦,分別建立了基于魯棒滑模變結(jié)構(gòu)控制方法的車速控制系統(tǒng)和基于模糊滑模自適應(yīng)控制算法的轉(zhuǎn)向控制系統(tǒng),并通過“駕駛員-控制器”雙在環(huán)半實(shí)物仿真實(shí)驗(yàn)驗(yàn)證了所提算法的有效性。文獻(xiàn)[3]針對(duì)雙側(cè)電機(jī)驅(qū)動(dòng)履帶車輛運(yùn)動(dòng)控制強(qiáng)耦合和不確定的特點(diǎn),提出了速度與橫擺角速度解耦的控制結(jié)構(gòu),同時(shí)建立了積分滑模速度控制器和模糊自適應(yīng)橫擺角速度控制器,并通過多個(gè)工況的仿真實(shí)驗(yàn)驗(yàn)證了所提控制策略能夠使得履帶車輛快速準(zhǔn)確地實(shí)現(xiàn)直線和轉(zhuǎn)向運(yùn)動(dòng)控制。文獻(xiàn)[4]針對(duì)電傳動(dòng)履帶車輛行駛工況復(fù)雜多變、兩側(cè)電機(jī)速度難以保持恒定實(shí)現(xiàn)穩(wěn)定行駛的難題,結(jié)合線性自抗擾算法提出一種電子差速控制策略,從而抑制擾動(dòng)、提高系統(tǒng)動(dòng)態(tài)性能。通過上述分析可知,當(dāng)前履帶車輛運(yùn)動(dòng)控制研究大都將縱向控制和橫向控制進(jìn)行解耦,分別設(shè)計(jì)車速控制器和轉(zhuǎn)向控制器進(jìn)行運(yùn)動(dòng)控制。然而在履帶車輛行駛過程中,縱向控制模型和橫向控制模型存在強(qiáng)耦合,不可能實(shí)現(xiàn)完全解耦,完全無法滿足履帶車輛高精度運(yùn)動(dòng)控制的要求。在自動(dòng)駕駛履帶車輛軌跡跟蹤控制方面,當(dāng)前研究則很少涉及。文獻(xiàn)[5]提出了一種前饋模型加PID補(bǔ)償器的自動(dòng)駕駛履帶車輛軌跡跟蹤控制方法,并通過MATLAB/Simulink軟件進(jìn)行了仿真測(cè)試。文獻(xiàn)[6-7]基于模型預(yù)測(cè)控制方法設(shè)計(jì)了軌跡跟蹤控制器,實(shí)現(xiàn)了自動(dòng)駕駛履帶車輛的軌跡跟蹤控制。但是,當(dāng)前自動(dòng)駕駛履帶車輛控制同樣基本是基于車速控制和轉(zhuǎn)向控制解耦來實(shí)現(xiàn),沒有考慮車輛在運(yùn)動(dòng)中的縱橫向耦合特性,同時(shí)也沒有考慮車輛在行駛過程中的路面變化、執(zhí)行器飽和及外界隨機(jī)干擾等不確定性因素的影響,這些因素不僅影響自動(dòng)駕駛履帶車輛軌跡跟蹤控制系統(tǒng)的性能和穩(wěn)定性,而且影響自動(dòng)駕駛履帶車輛完成特定任務(wù)的完整度,甚至導(dǎo)致任務(wù)的失敗而造成嚴(yán)重后果。因此亟待探索復(fù)雜環(huán)境考慮動(dòng)力學(xué)與運(yùn)動(dòng)學(xué)耦合的自動(dòng)駕駛履帶車輛軌跡跟蹤控制方法。
本文針對(duì)上述問題,首先基于拉格朗日方程建立自動(dòng)駕駛履帶車輛的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)耦合模型;在此基礎(chǔ)上,針對(duì)模型非線性導(dǎo)致軌跡跟蹤難以精確控制的問題提出自適應(yīng)控制方法,以實(shí)現(xiàn)對(duì)控制系統(tǒng)前饋、抵消模型非線性的影響;進(jìn)而通過誤差符號(hào)魯棒積分進(jìn)行狀態(tài)反饋,以抑制模型不確定性和外界隨機(jī)干擾的影響,實(shí)現(xiàn)在執(zhí)行器力矩受限情況下的系統(tǒng)漸進(jìn)穩(wěn)定,提升軌跡跟蹤控制系統(tǒng)的穩(wěn)態(tài)和暫態(tài)性能。
1 自動(dòng)駕駛履帶車輛運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)耦合建模
1.1 自動(dòng)駕駛履帶車輛運(yùn)動(dòng)學(xué)建模
本文研究對(duì)象為自動(dòng)駕駛雙側(cè)電機(jī)驅(qū)動(dòng)履帶車輛,屬于典型差速轉(zhuǎn)向履帶車輛,主要通過控制左右兩側(cè)主動(dòng)輪轉(zhuǎn)速控制速度和方向,實(shí)現(xiàn)對(duì)決策系統(tǒng)期望軌跡的精確跟蹤控制。自動(dòng)駕駛履帶車輛運(yùn)動(dòng)學(xué)示意如圖1所示。圖1中,Oxy為大地坐標(biāo)系,CxCyC為履帶車輛坐標(biāo)系,C為履帶車輛幾何中心和質(zhì)心的重合點(diǎn),B為兩側(cè)履帶中心距離,r為主動(dòng)輪半徑,l為履帶長(zhǎng)度,θ表示履帶車輛的航向角。

圖1 自動(dòng)駕駛履帶車輛運(yùn)動(dòng)學(xué)示意圖
在進(jìn)行運(yùn)動(dòng)學(xué)分析時(shí),假設(shè)履帶車輛幾何中心和質(zhì)心重合,定義自動(dòng)駕駛履帶車輛的狀態(tài)量為q=(x,y,θ)T,其中(x,y)表示履帶車輛的位置。不考慮滑動(dòng)因素,根據(jù)理論力學(xué)原理,履帶車輛在OXY坐標(biāo)系中的運(yùn)動(dòng)學(xué)模型[8]為
(1)

(2)
由(2)式可得
(3)
(3)式代入(1)式,可得
(4)
由(4)式可知,履帶車輛系統(tǒng)狀態(tài)量由3個(gè)變量組成,而控制量則為2個(gè),因此履帶車輛為典型非完整系統(tǒng),履帶車輛的控制問題受到Brockett條件的限制[11]。
1.2 自動(dòng)駕駛履帶車輛動(dòng)力學(xué)建模
根據(jù)拉格朗日動(dòng)力學(xué)建模方法,履帶車輛系統(tǒng)在運(yùn)動(dòng)過程中的動(dòng)力學(xué)模型可表示為
L=E-P,
(5)
式中:L表示拉格朗日函數(shù);E表示履帶車輛系統(tǒng)動(dòng)能;P表示履帶車輛系統(tǒng)勢(shì)能。則履帶車輛系統(tǒng)動(dòng)能[12]為
(6)
式中:m為履帶車輛的質(zhì)量;J為履帶車輛圍繞質(zhì)心轉(zhuǎn)動(dòng)的轉(zhuǎn)動(dòng)慣量。由于履帶車輛是在地面上行駛,系統(tǒng)勢(shì)能為0,從而有履帶車輛系統(tǒng)的拉格朗日函數(shù)為
(7)

(8)
式中:Q為廣義力矩陣,Q=B(q)τ,B(q)∈R3×2,τ=(τ1,τr)T表示左右兩側(cè)電機(jī)軸輸出力矩;A(q)表示約束矩陣;λ為約束向量。根據(jù)(1)式可得
(9)
因此,(8)式受到的非完整約束為
(10)
式中:A(q)=(sinθ,-cosθ,0)。同時(shí),由(7)式可知
(11)
(11)式對(duì)時(shí)間t求導(dǎo),可得
(12)
則根據(jù)(8)式、(11)式、(12)式可得
(13)

(14)
自動(dòng)駕駛履帶車輛在行駛過程中受到地面摩擦力及坡度變化、路面參數(shù)變化、風(fēng)阻、滑轉(zhuǎn)及滑移等復(fù)雜外界干擾影響,綜合考慮上述影響,得到履帶車輛動(dòng)力學(xué)模型[13]如下:

B(q)τ+AT(q)λ,
(15)

1.3 自動(dòng)駕駛履帶車輛運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)耦合建模
自動(dòng)駕駛履帶車輛運(yùn)行過程中,運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型始終是耦合作用的,共同影響自動(dòng)駕駛履帶車輛軌跡跟蹤控制系統(tǒng)性能,因此根據(jù)(4)式和(15)式定義輔助變量q1,則有
(16)

ST(q)AT(q)=0.
(17)
對(duì)(16)式進(jìn)行求導(dǎo),得
(18)
(18)式代入(15)式,得

G(q)+d(t)=B(q)τ+AT(q)λ,
(19)

(20)
式中:
為了便于分析和設(shè)計(jì)控制方法,給出(19)式的性質(zhì)如下:


2 控制目標(biāo)
自動(dòng)駕駛履帶車輛在軌跡跟蹤時(shí)的控制目標(biāo)為設(shè)計(jì)一個(gè)輸入有限、連續(xù)的控制器,在系統(tǒng)不確定性及外界干擾的影響下,可以保證系統(tǒng)狀態(tài)q1(t)可以漸進(jìn)跟蹤期望軌跡q1d(t),即
(21)
定義跟蹤誤差變量et(t)為
et(t)=(q1d(t)-q1(t)).
(22)
為便于后續(xù)分析,(23)式、(24)式定義了非線性濾波跟蹤誤差en(t)和p,p和ef為輔助誤差向量,用于設(shè)計(jì)自動(dòng)駕駛履帶車輛的軌跡跟蹤控制器,tanh(·)表示雙曲正切函數(shù),用來合理規(guī)劃控制輸入,β1、β2、β3∈R為非負(fù)常數(shù),p不會(huì)出現(xiàn)在最終的控制律中,分別表示如下:
(23)
(24)
ef的動(dòng)態(tài)方程系統(tǒng)定義如(25)式所示:
(25)
ef(0,0)=0,γ1與γ2分別表示非負(fù)控制增益,cosh(·)表示雙曲余弦函數(shù)。
雙曲正切函數(shù)tanh(·)與雙曲余弦函數(shù)cosh(·)具有性質(zhì)3.
性質(zhì)3定義向量ξ=[ξ1,ξ2,…,ξn]T∈Rn,則對(duì)于雙曲正切函數(shù)向量tanhξ=[tanhξ1,tanhξ2,…,tanhξn]T∈Rn與雙曲余弦函數(shù)矩陣coshξ=diag[coshξ1,coshξ2,…,coshξn]T∈Rn滿足如下不等式組[13]:

ξ>tanhξ,
tanhξ2≥tanh2ξ,
ξTtanhξ≥tanhTξtanhξ.
(26)
3 控制方法
3.1 狀態(tài)反饋跟蹤控制分析
(27)
(23)式求導(dǎo),得到
(28)
(28)式代入(27)式,得到
(29)
(25)式代入(29)式,得
(30)
根據(jù)(22)式,得
q1=q1d-et,
(31)
對(duì)(31)式求t的2階導(dǎo)數(shù),得
(32)
(32)式代入(20)式,變換得
(33)
(33)式代入(30)式并簡(jiǎn)化,得到
(34)

(35)
(36)
因此,自動(dòng)駕駛履帶車輛的狀態(tài)反饋跟蹤控制律為
(37)
式中:u為誤差符號(hào)魯棒積分反饋控制項(xiàng);d表示自適應(yīng)前饋控制項(xiàng),
d=Φd,
(38)

(39)

(t)=(0)+

(40)
誤差符號(hào)魯棒積分項(xiàng)為
u=γ1tanhΘ,
(41)



(42)
式中:α為正常數(shù)。
3.2 誤差閉環(huán)控制分析
對(duì)(41)式求導(dǎo),得到
(43)
因此,自動(dòng)駕駛履帶車輛軌跡跟蹤控制的誤差閉環(huán)控制方程為
(44)
式中:
(45)
(46)
(47)
式中:xρ=[tanhTet,tanhTen,en,pT,tanhTef]T.根據(jù)性質(zhì)2可得
(48)

4 穩(wěn)定性分析
4.1 分析方法
在論證誤差信號(hào)魯棒積分控制器控制性能之前,先給出如下引理。
引理1定義輔助函數(shù)P(t)和輔助變量K(t)如下:

(49)
K(t)=pT(N-αγ1sgnen),
(50)

(51)
定理1針對(duì)(20)式所示自動(dòng)駕駛履帶車輛軌跡跟蹤控制系統(tǒng),采用(38)式和(41)式構(gòu)成的魯棒積分控制器,可使得系統(tǒng)能夠跟蹤參考輸入,且不受未建模動(dòng)態(tài)與外界干擾的影響。即t→∞時(shí)跟蹤誤差et→0,且所有閉環(huán)信號(hào)都有界。
證明首先引入如下引理:
(52)

SD={ξ∈D|W2(ξ)≤δ},
(53)
定義Lyapunov函數(shù)V如下:
(54)
根據(jù)引理2,V滿足如下不等式:
W1(χ)≤V≤W2(χ),
(55)
式中:χ為定義的任意列向量。由(26)式和(55)式,可得正定函數(shù)W1(χ)與W2(χ)為
(54)式沿時(shí)間t求導(dǎo),則得到
(56)
(22)式、(25)式引入(56)式,得

tanhTen[p-β2tanhen-β3en]+



tanhTef[-γ1en+tanhet+γ2tanhef]+

(57)
(43)式和(51)式代入(57)式并化簡(jiǎn),得

β2tanhTentanhen-β3tanhTenen-

γ1tanhTefen-γ2tanhTeftanhef-
(58)
根據(jù)性質(zhì)1和(24)式,得到


γ1λm‖p‖2+ρ(‖xρ‖)‖xρ‖‖p‖+
‖tanhet‖‖en‖+γ1‖tanhef‖‖en‖,
(59)
式中:λm為任意正常數(shù)。
根據(jù)Young不等式,則得到
(60)
式中:γa、γb為正常數(shù)。
4.2 穩(wěn)定性驗(yàn)證



(61)

5 仿真驗(yàn)證與實(shí)車驗(yàn)證
5.1 仿真驗(yàn)證
為驗(yàn)證本文所提自動(dòng)駕駛履帶車輛軌跡跟蹤控制方法的有效性,分別進(jìn)行仿真驗(yàn)證和實(shí)車驗(yàn)證,仿真驗(yàn)證時(shí)的自動(dòng)駕駛履帶車輛參數(shù)如表1所示。

表1 自動(dòng)駕駛履帶車輛仿真參數(shù)
在仿真中,給定自動(dòng)駕駛履帶車輛期望軌跡設(shè)置為
xd=10cost,
yd=10sint.

圖2(a)~圖2(d)為本文所提自動(dòng)駕駛履帶車輛軌跡跟蹤控制方法性能與傳統(tǒng)PID控制方法性能的對(duì)比結(jié)果。圖2中,xe為車輛X軸方向的誤差,ye為車輛Y軸方向的誤差,θe為車輛角度誤差。從圖2(a)中可知,相比傳統(tǒng)PID控制方法,本文所提方法能夠在非線性不確定性和外界干擾下依然可以精確跟蹤期望軌跡,同時(shí)由圖2(b)~圖2(d)可知,本文所提方法的軌跡跟蹤誤差能夠快速收斂到0的鄰域內(nèi),且軌跡跟蹤誤差xe、ye均小于0.2 m,由此可見本文所提方法具有較高精度的軌跡跟蹤效果。
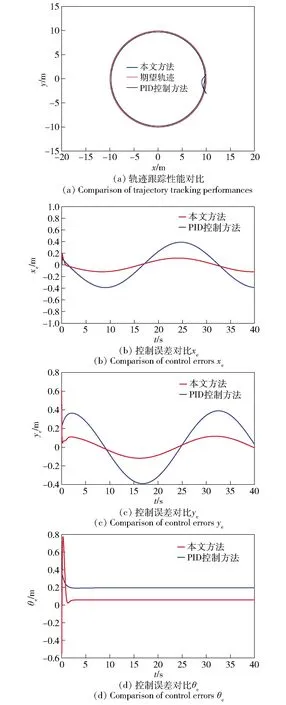
圖2 自動(dòng)駕駛履帶車輛本文方法和PID控制方法軌跡跟蹤控制仿真對(duì)比結(jié)果
5.2 實(shí)車驗(yàn)證
為驗(yàn)證所提方法具有可用性,在雙側(cè)獨(dú)立電驅(qū)動(dòng)自動(dòng)駕駛履帶車輛平臺(tái)上對(duì)所提方法進(jìn)行實(shí)車驗(yàn)證。實(shí)車驗(yàn)證平臺(tái)如圖3所示。

圖3 雙側(cè)獨(dú)立電驅(qū)動(dòng)自動(dòng)駕駛履帶車輛平臺(tái)
雙側(cè)電機(jī)驅(qū)動(dòng)自動(dòng)駕駛履帶車輛平臺(tái)通過兩個(gè)電機(jī)分別驅(qū)動(dòng)兩側(cè)主動(dòng)輪,運(yùn)動(dòng)控制單元通過調(diào)節(jié)電機(jī)的轉(zhuǎn)矩,使兩側(cè)主動(dòng)輪受控于期望的狀態(tài)下。當(dāng)兩主動(dòng)輪轉(zhuǎn)速相同時(shí),車輛進(jìn)行直駛,當(dāng)兩側(cè)主動(dòng)輪形成轉(zhuǎn)速差時(shí),車輛進(jìn)行轉(zhuǎn)向。整車結(jié)構(gòu)如圖4所示,自主控制單元接收根據(jù)自主決策系統(tǒng)規(guī)劃的期望路徑,并進(jìn)行在線實(shí)時(shí)解析,形成運(yùn)動(dòng)控制命令,并通過CAN總線傳遞給電機(jī)控制器執(zhí)行,最后由電機(jī)實(shí)現(xiàn)受控的轉(zhuǎn)矩輸出。
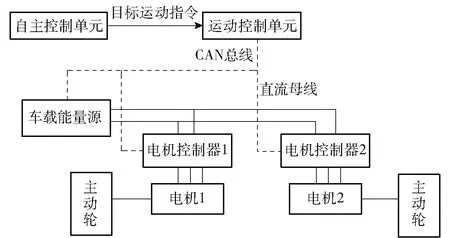
圖4 自動(dòng)駕駛履帶車輛平臺(tái)控制系統(tǒng)
實(shí)驗(yàn)環(huán)境如圖5所示。

圖5 實(shí)驗(yàn)環(huán)境
5.3 實(shí)車實(shí)驗(yàn)結(jié)果
實(shí)車實(shí)驗(yàn)預(yù)設(shè)了直線工況與曲線工況兩種期望軌跡,進(jìn)而控制車輛跟蹤期望軌跡。
5.3.1 直線工況
在上述實(shí)驗(yàn)環(huán)境中,自動(dòng)駕駛履帶車輛分別以5 m/s的速度沿直線行駛,不涉及轉(zhuǎn)向。同樣采用PID控制方法與本文所提方法進(jìn)行對(duì)比,對(duì)比實(shí)驗(yàn)結(jié)果如圖6(a)與圖6(b)所示。
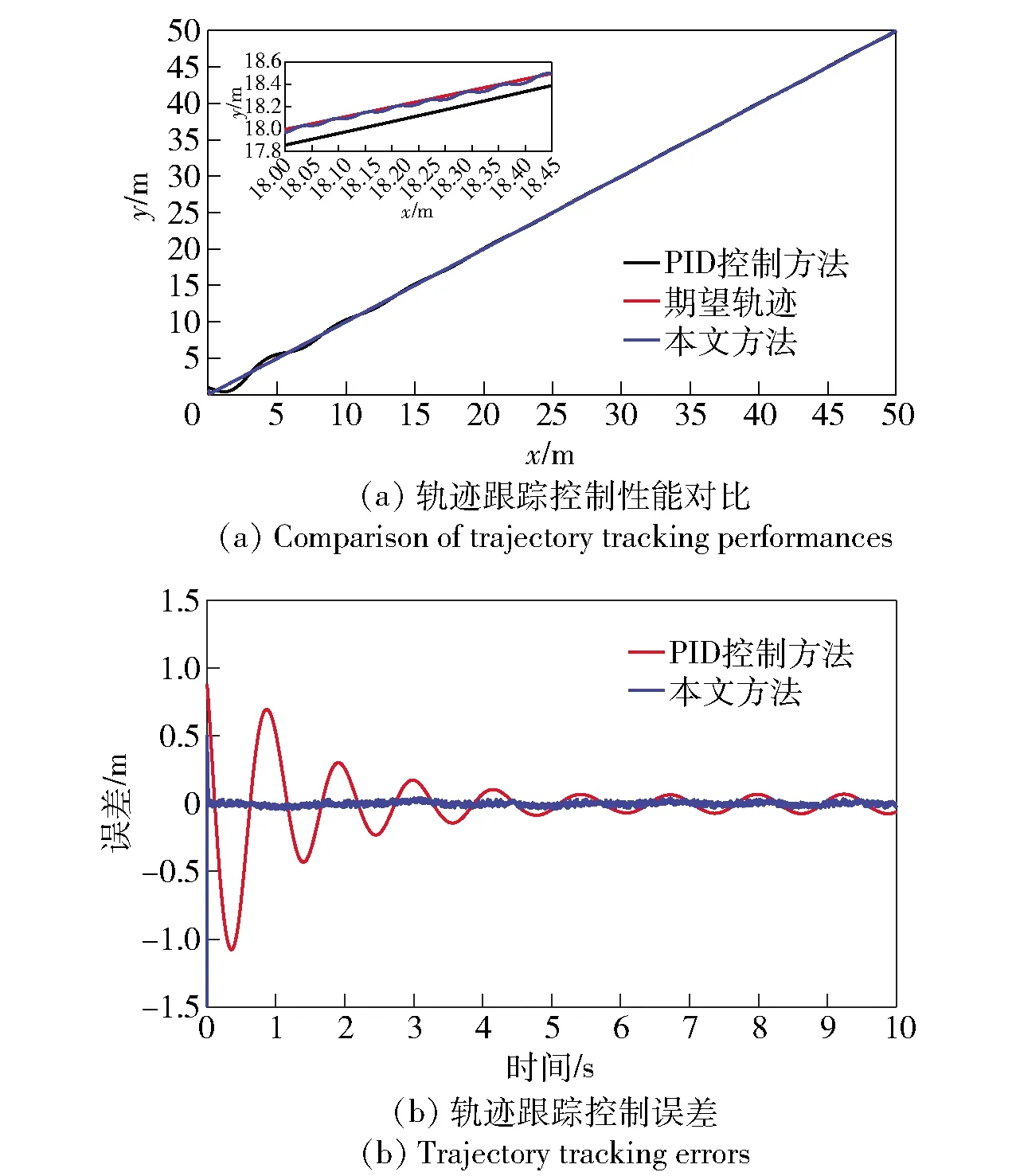
圖6 直線工況自動(dòng)駕駛履帶車輛軌跡跟蹤實(shí)驗(yàn)結(jié)果
圖6中:圖6(a)為直線工況下所提自動(dòng)駕駛履帶車輛的軌跡跟蹤控制性能對(duì)比,可見在圖5所示實(shí)驗(yàn)環(huán)境中,本文所提方法相比PID控制方法,能夠控制履帶車輛精確跟蹤期望軌跡,具有較好的跟蹤效果;圖6(b)為自動(dòng)駕駛履帶車輛軌跡跟蹤誤差,可見軌跡跟蹤誤差漸進(jìn)趨向于0 m的鄰域內(nèi),且具有較小控制誤差。以上結(jié)果表明本文所提基于誤差符號(hào)魯棒積分的自動(dòng)駕駛履帶車輛軌跡跟蹤控制方法在直線工況下具有較高的跟蹤精度,同時(shí)能夠抑制各種模型不確定性及外界干擾的影響。
5.3.2 曲線工況
曲線工況的期望軌跡定義如下:
則曲線工況下自動(dòng)駕駛履帶車輛的軌跡跟蹤實(shí)車實(shí)驗(yàn)結(jié)果如圖7所示。其中:圖7(a)為在曲線工況下的軌跡跟蹤控制性能,圖7(b)與圖7(c)為軌跡跟蹤誤差。由圖7(a)與圖7(c)可知,本文所提方法可以在曲線工況下實(shí)現(xiàn)對(duì)期望軌跡的漸進(jìn)穩(wěn)定跟蹤,同時(shí)使得跟蹤誤差保持在0.2 m范圍內(nèi)。

圖7 曲線工況下實(shí)車實(shí)驗(yàn)結(jié)果
綜上所述,通過實(shí)車實(shí)驗(yàn)論證了本文所提方法的有效性,表明該方法可以在保持高精度軌跡跟蹤的同時(shí)對(duì)系統(tǒng)不確定性及外界隨機(jī)干擾具有強(qiáng)魯棒性。
6 結(jié)論
1)本文針對(duì)復(fù)雜野外環(huán)境下的自動(dòng)駕駛履帶車輛軌跡跟蹤控制問題,提出基于誤差符號(hào)魯棒積分的軌跡跟蹤控制方法,建立自動(dòng)駕駛履帶車輛的運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)耦合模型,解決了基于解耦控制結(jié)構(gòu)的軌跡跟蹤控制方法模型耦合作用難以實(shí)現(xiàn)精確控制的問題。
2)采用自適應(yīng)控制方法實(shí)現(xiàn)對(duì)未建模動(dòng)態(tài)、參數(shù)誤差等模型不確定性的在線前饋補(bǔ)償,同時(shí)結(jié)合誤差符號(hào)魯棒積分控制實(shí)現(xiàn)對(duì)外界干擾的反饋抑制,并基于李雅普諾夫穩(wěn)定性理論證明了所提方法的漸進(jìn)穩(wěn)定性。
3)通過仿真與實(shí)車驗(yàn)證,證明了所提方法在未建模動(dòng)態(tài)、參數(shù)不確定性及外界隨機(jī)強(qiáng)干擾條件下,具有較高的軌跡跟蹤控制精度和強(qiáng)魯棒性。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56