基于STM32的可升降智能減速帶系統
2021-07-26 15:42:16崔婧琪薛博雅胡雍怡
科技與創新 2021年13期
關鍵詞:單片機
崔婧琪,薛博雅,劉 帥,胡雍怡,吳 帆,陳 薇
(合肥工業大學電氣與自動化工程學院,安徽 合肥 230002)
隨著國內的汽車業的發展,中國居民汽車保有量成倍增長,車輛增多也導致交通事故發生率上升,道路行駛的安全性愈發受到重視。為提升安全性,交管部門會在事故高發路段設置警示牌,如“前方事故高發路段,請減速行駛”“前方學校路段,請減速行駛”等,然而設立警示牌的減速效果與司機本身有密切關聯,車齡較長或是對路段較熟悉的的司機常常對標牌視若無睹,并不會因此采取減速措施。有些道路采用形式多樣的測速系統,卻受制于拍攝角度、后期檢修維護等因素,無法全面普及。在此背景下,減速帶應運而生。
中國城市道路交通發展時間較早,發展初期,生產技術、設計方案和使用成本均有限,道路上設置的減速帶較多采用傳統的梯形和半弧形結構,通過影響駕駛人的心理來實現減速。傳統結構的減速帶雖然成本較低,但是對于車輛的實際減速效果并不理想,且容易造成底盤磨損等,使車輛使用壽命降低。一些針對傳統減速帶的調研報告也顯示,通過減速帶時,無論車輛速度高低,駕駛員與乘車人均感受到明顯震動,乘車體驗感較差。目前發生的超速造成的交通事故中,傳統減速帶對車輛的傷害也不容忽視。隨著中國近年來的經濟發展,與城市道路交通相關的配套設施也愈發完善,人們逐漸意識到了傳統減速帶的弊端。
針對上述問題,擬設計一種可升降智能減速帶。智能減速帶通過單片機可實現對相關路段行車速度的管制,在確保基礎行車安全的同時,降低駕駛人員的顛簸感,減少對通過車輛的傷害。輔以對斑馬線上行人通過情況的監測和夜間的指示燈功能,使得傳統減速帶的安全性得到進一步的提高和拓展。
1 新型減速帶結構設計
為了將減速帶智能化,傳統的減速帶結構已經不再適用。為了將電子器件與減速帶有機結合起來,有針對性地設計了這種新型減速帶的結構。在實現預期技術目的的基礎上,減速帶的設計主要考慮機械結構的穩定性、升降動力傳遞的靈活性以及安裝與維護的難易程度等因素。
每一塊減速板單元主要包括2塊減速板側板和1塊減速板頂板以及外部的起緩沖作用的橡膠。在外觀和規格上,預期的減速帶與目前市場上的普通減速帶基本一致,能滿足所需的減速需求。
新型減速帶外觀如圖1所示。
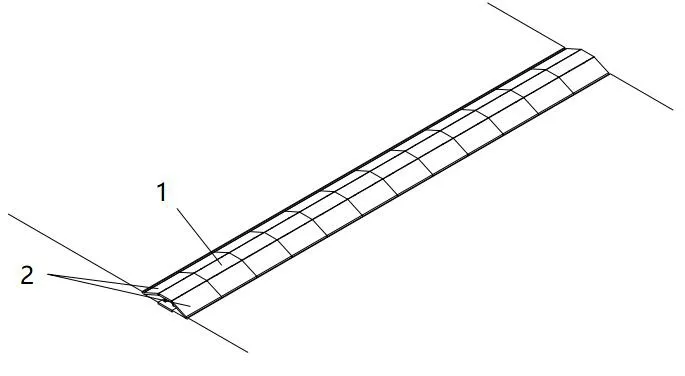
圖1 新型減速帶外觀模型圖
升降結構部分主要包括底部支撐板、電動推桿、加長桿、上層支撐板、剪刀撐,新型減速帶側面模型如圖2所示。其中,電動推桿為系統的主動件,主動件能夠在控制模塊的控制下,精確地通過電動推桿伸縮的方式實現動力的輸出。其余零件為從動件,動力從電動推桿裝置依次通過上層支撐板、剪刀撐傳遞到減速板,從而實現所述機構的升降預期。
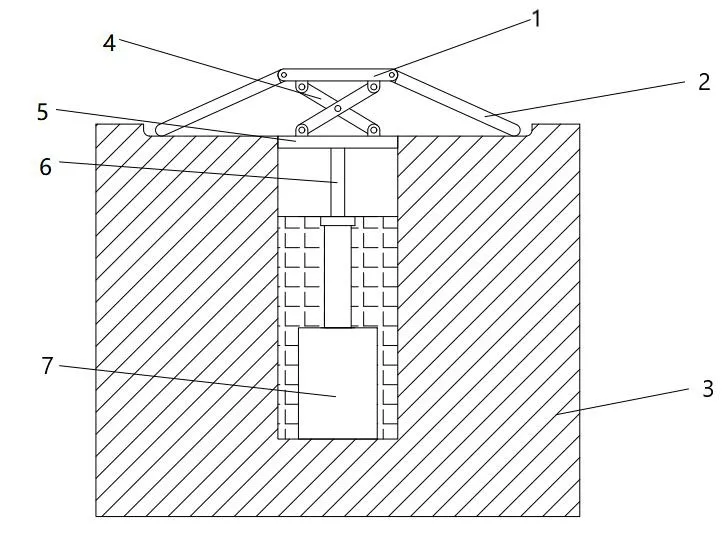
圖2 新型減速帶側面模型圖
在所述機械結構中,考慮到機構的使用環境,在使用過程中會受到車輪的撞擊而產生的強大沖擊力,為避免主動件受橫向沖擊力,因此不采用將減速板與電機裝置直接相連的措施,而是在減速板與電動推桿裝置間加裝了剪刀撐結構來承受橫向分力。
2 新型減速帶電氣硬件設計
新型智能減速帶系統的各模塊電氣連接如圖3所示。
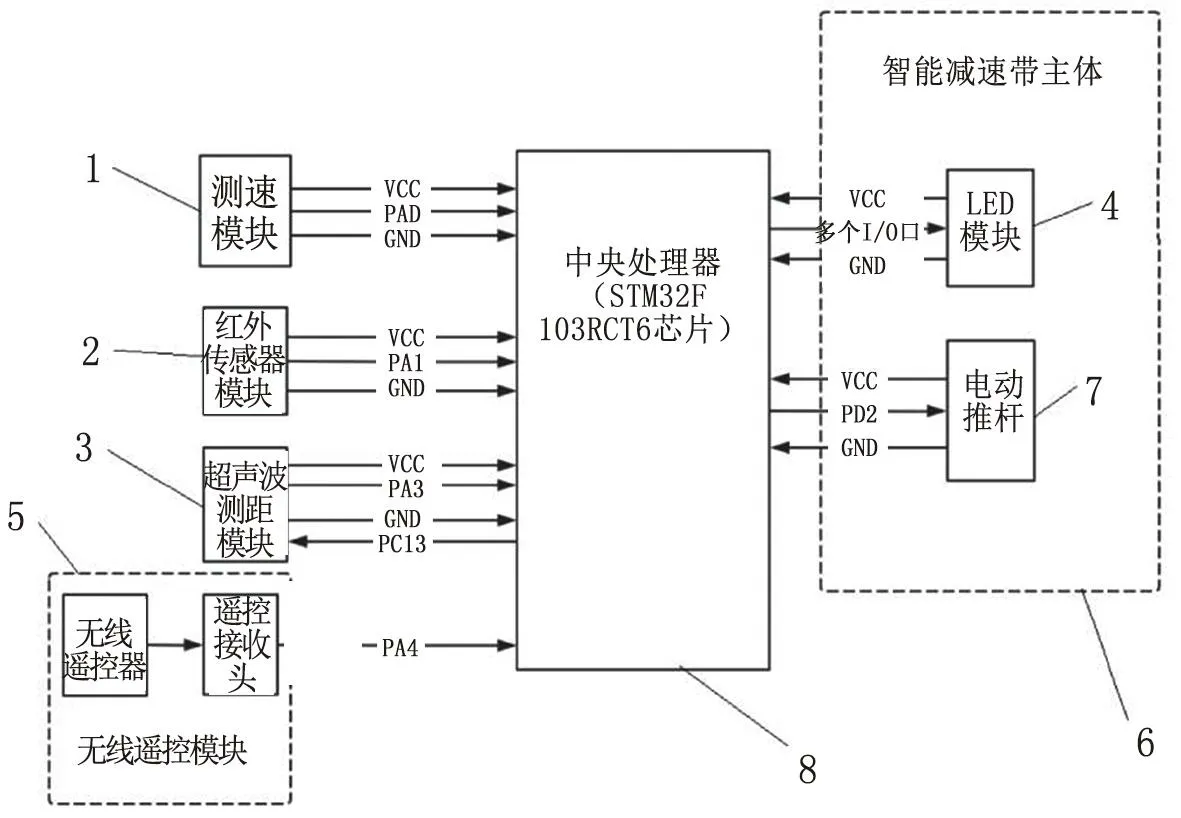
圖3 新型智能減速帶系統各模塊電氣連接
2.1 地感線圈測速模塊
地感線圈測速是一種基于電磁感應原理的測速方法,它由2組埋在路面下的地感線圈與1個車輛檢測器組成。當車輛通過時,其金屬底板與線圈之間發生磁感應,使線圈的電感值減小,測速系統回路的調諧頻率發生變化。車輛通過2個地感線圈產生的信號經過整形后處理成矩形波,已知2個線圈的距離,計算信號的時間間隔即可得到車輛的速度[4]。
擬將2組電感線圈安裝于減速帶后方(以車輛前進方向為前方,下同)5 m和10 m處,車輛通過后,車速檢測器將車輛的速度轉換為電信號傳輸至單片機,由單片機判斷車輛是否超速,進而下達指令給升降模塊,完成下一步功能。
2.2 行人檢測模塊
紅外傳感器可以利用熱釋電效應將溫度信號轉換為電信號進行探測。進入感應范圍后,人體發射的8~14μm紅外線通過菲涅爾濾光片調制后聚焦到敏感源上。敏感源通常采用熱釋電元件,這種元件在接收到人體紅外輻射溫度發生變化時就會失去電荷平衡,向外釋放電荷,經后續電路放大和濾波等處理后就能輸出電信號[5]。
HC-SR501是應用廣泛的人體感應模塊,靈敏度高,可靠性強,使用簡單,檢測范圍和延時時間可以根據使用需求進行調節。將人體感應模塊安裝在斑馬線靠近人行道的兩側,當檢測到行人通過時,由OUT端輸出一個高電平并傳回單片機。在設置的延時時間內,如果有行人在感應范圍內走動,其輸出將一直保持高電平,傳感器范圍內無人時,OUT端恢復低電平。單片機通過接收的信號電平判斷斑馬線是否有行人通過,并發出下一步指令。
2.3 超聲波測距模塊
測距可通過超聲波的發射與接收來實現。超聲波發射器可向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回,超聲波接收器收到反射波停止計時。
考慮到智能減速帶可能工作于氣候潮濕、雨水較多的地區,且測距模塊不應在路面占用過多空間,以免對車輛的正常行駛造成不便,擬采用一種帶有一體化封閉式防水帶線探頭的JSN-SR04T超聲波測距模塊。將測距模塊緊貼減速帶前方安裝,若接收器檢測到有信號返回,則通過I/O口輸出一個高電平,高電平持續的時間就是超聲波從發射到返回的時間。測量距離=(高電平時間×聲速)/2,聲速可取340 m/s。車輛通過減速帶時,測距模塊所測距離明顯減小,I/O口輸出的高電平時長變短。當車輛完全通過后減速帶后,測距模塊輸出變為正常值。輸出的電信號被單片機接收,進行相應的計算得到此時測距模塊所測距離大小,判斷車輛是否完全通過減速帶,并完成下一步功能。
2.4 LED模塊
安裝LED燈用來顯示減速帶的升降狀態,可以更加有效地提醒司機和行人并做好準備。當減速帶升起時,LED燈顯示紅色;當減速帶降落時,LED燈滅。
2.5 無線遙控模塊
鑒于智能減速帶控制單元位于路面下方,遙控信號需要具有良好的穿透力和穩定性。因此,擬采用基于PT2262/2272編解碼電路的無線遙控套件對減速帶進行遠程控制。預設的觸發信號經過編碼模塊編碼、調制、放大、輸出,被解碼接收模塊接收并解碼出數據傳給單片機,由單片機根據指令控制減速帶的升降。
2.6 基于電動推桿的升降模塊
在緩沖帶所在的地面下方鋪設相應數量的電動推桿,以實現對緩沖帶的工作狀態的控制。將電動推桿和往復式電機通過驅動模塊與單片機進行連接,在對相應的信號實現處理同時,也可以通過控制電機上升的時間來實現對緩沖帶上升高度的控制。
部分傳感器實物如圖4所示。

圖4 部分傳感器實物圖
3 新型減速帶電氣軟件設計
智能減速帶系統在工作時,由地感線圈模塊檢測車輛是否超速,行人檢測模塊檢測斑馬線上是否有行人,超聲波測距模塊判斷前一車輛是否完全通過,無線遙控模塊接收控制指令。當前三者全部滿足時,即車輛超速,斑馬線上有行人,前一車輛已經完全通過,STM32核心板發送減速帶升起指令,從而控制電動推桿和LED燈(如圖5所示)。在特殊情況下,減速帶的升起狀態可通過人為控制,即通過無線遙控發出減速帶升起指令,這時,即使不滿足前三個條件,STM32核心板依然發出減速帶升起指令。
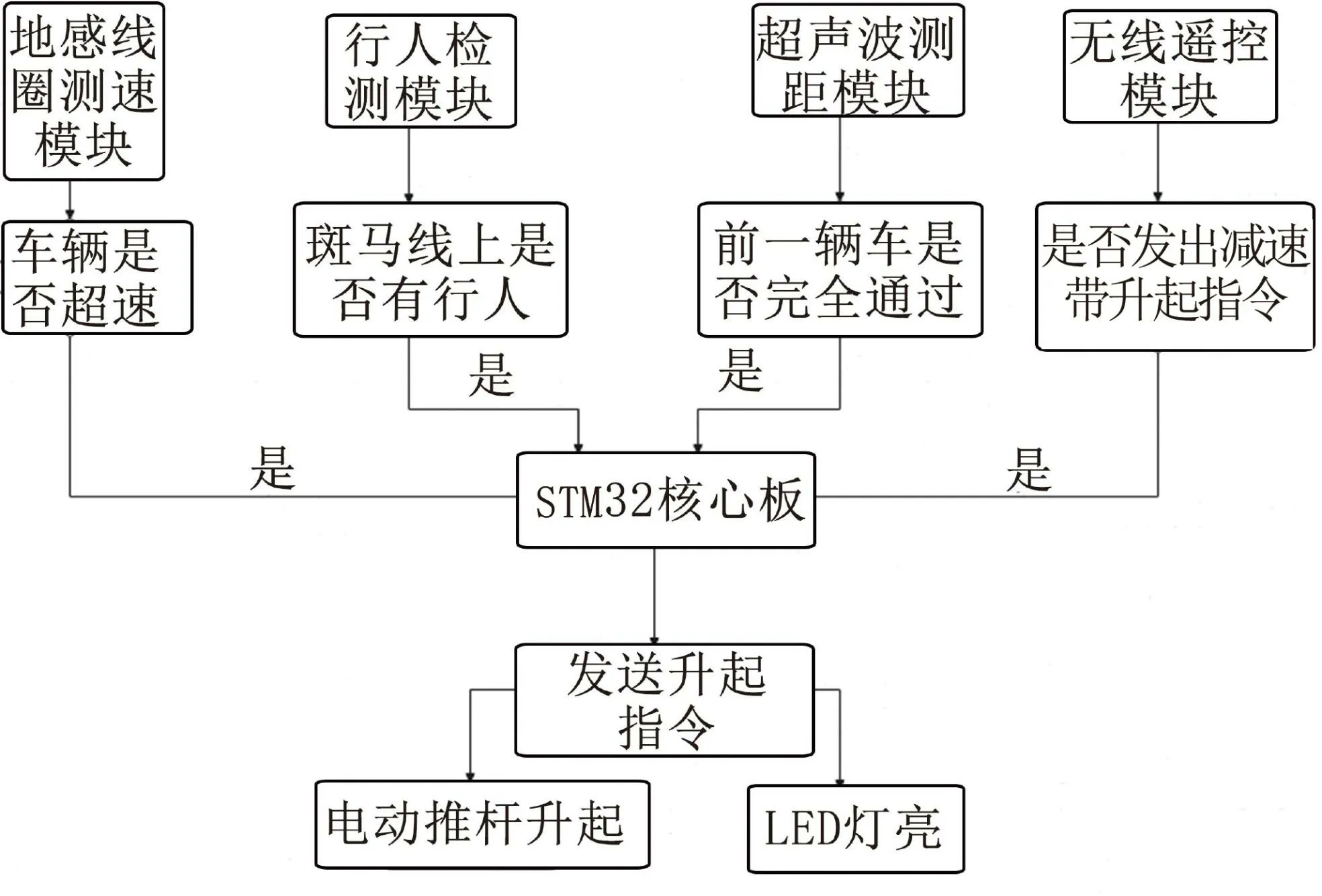
圖5 電氣軟件部分流程圖
4 結束語
可升降智能減速帶系統采用的所有技術在國內外研究中廣泛采用,技術十分成熟,理論上是可行的。整體適應性好,應用范圍廣,對于減速帶可設可不設的尷尬地段、學校之類的分時段限速路段、易受霧雪天氣影響的交通事故黑點路段均能適用,綜合效益較高,有利于改善交通整體環境,結合可持續發展的主題,實現綠色交通。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
