一種多主星模型的多視場星圖識別方法
2021-07-23 07:00:34謝俊峰
激光與紅外 2021年7期
關鍵詞:信息
金 杰,謝俊峰,2,李 響
(1.遼寧工程技術大學測繪與地理科學學院,遼寧 阜新 123000;2.自然資源部國土衛星遙感應用中心,北京 100048)
1 引 言
星敏感器具有可靠性好、精度高、自主性強的優點,是高分辨率遙感衛星姿態控制的重要控件[1-3]。隨著遙感衛星對無控制幾何定位精度要求提升,甚高精度星敏重要性日益凸顯[4]。對于甚高精度星敏感器而言,若想保證角分辨率足夠高,對視場角的選取不宜過大,這樣就導致星圖中恒星的數量有限,當局部區域出現恒星數量過少,會對實時定姿的精度造成影響,無法提供準確的姿態信息。而多個星敏感器聯合進行星圖識別,可以使得這一問題得以解決,提高星圖識別的可靠性,同時可以提高飛行器定姿精度[5-6]。高分七號是我國首顆亞米級立體測圖衛星,于2019年11月3日發射,用于開展1∶1萬立體測圖[7]。星上采用兩臺國產雙視場星敏感器,視場大小均為8.9°×8.9°,面陣大小為2048×2048像素,小視場、大面陣的星敏感器可以確保擁有較高的角分辨率,同時多個視場保證了星圖識別的可靠性,為衛星提供高精度姿態數據。
目前絕大多數的星敏感器星圖識別算法均采用的是單一星敏感器,對于單視場星敏感器而言,星圖識別算法主要劃分為兩種類型[8-9],子圖同構與模式識別。子圖同構類算法主要是利用恒星的星等信息以及恒星之間計算出的角距信息,把恒星星點視為頂點,將恒星構成三角形或者多邊形的模式,以此進行星圖識別。其中經典算法有三角形算法[10-11]、匹配組算法[12-13]等。模式識別類算法本質就是對每顆恒星進行特征構造,生成一個唯一的特征“星模式”,利用這個“星模式”在導航星表中尋找相似導航星,其中經典算法有柵格算法[14]、基于統計特征的識別算法[15]。以上算法在用于多視場星敏感器的星圖識別時,由于視場角較小,視場內的觀測星數量不能得到保證,并且較小的視場角會對星特征的構建產生影響,因此,傳統的基于單視場的星圖識別算法不完全適用于多視場星敏感器。
針對多視場星敏感器星圖識別方法研究的公開資料較少,尤政[16]等人公開了一種雙視場星敏感器,射入兩個視場的光線通過一個半透半反的平面鏡,將光線進行透射以及反射,使其成像在同一個CCD上,利用光線之間的角度關系進行星圖識別。這種方法僅適用于多視場觀測星成像在同一星敏感器的情況下,并且光線經過透射與反射,勢必會對觀測星亮度造成影響。王昊京和吳亮[17]等人采用三角形算法優先對視場內恒星進行星圖識別,若識別結果小于三顆星,才聯合其他視場的恒星進行視場間星圖識別。熊雪[1]等人以三視場為例,提出了一種多視場三角形星圖識別算法,該算法采用圖像拼接的方式,采用基于徑向特征的方式,將同一時刻三個視場采集的星圖進行拼接,生成一個廣視場角的拼接后星圖,對拼接后的星圖進行三角形識別。該方法具有局限性,若多視場星敏感器光軸夾角較大,同一時刻生成的多幀星圖無重疊圖像,則無法完成對星圖的配準與拼接。姜笛[18]等人提出了一種基于最優路徑的多視場星圖識別方法,該方法首先需要將星圖進行融合,若不同視場生成的星圖無重疊部分,同樣無法進行星圖的融合,因此,該方法也具有局限性。
通過以上分析,發現目前已有的多視場星圖識別算法均對星敏感器之間的安裝結構有著一定的要求,因此均存在著一定的局限性。因此,本文提出了一種多主星模型的多視場星敏感器星圖識別方法,該方法不受視場間光軸夾角的限制,即使不同視場在同一時刻生成的星圖無重疊部分,依舊可以對多視場聯合進行星圖識別,識別過程中,在利用星等信息的同時,引入距離信息構造出多主星模型,具有更高的可靠性。
2 多視場星矢量坐標轉換
2.1 多視場星敏感器模型
多視場星敏感器可以在同一時刻拍攝不同天區的恒星,獲得更多的恒星信息,覆蓋區域更廣,有效地解決了單視場星敏感器若想提高角分辨率,則必然需要舍棄觀測星數量這一問題。同時,多視場獲取的恒星位置更加分散,具有更高的穩定性與可靠性,求解的姿態信息精度更高。多視場成像原理如圖1所示。
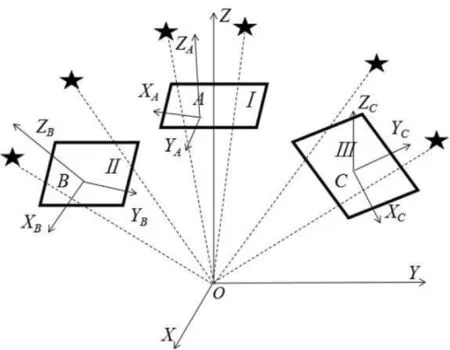
圖1 多視場成像模型
2.2 星矢量坐標轉換
多個星敏在同一時刻獲得多幀不同的星圖,經質心提取后,可以獲得多幀星圖中的恒星位于各自的像平面坐標系下的坐標。若想進行視場間星圖識別,需要多幀星圖中的星像坐標位于同一坐標系下,否則無法直接求取視場間恒星的角距信息,這里以一個星敏感器作為基準,設為1a,將其余星敏感器下的像點坐標轉換到1a像平面坐標系下。
假設在某一時刻下,1a拍攝星圖中某一恒星像點坐標為(Xa,Ya),利用式(1)將恒星像點坐標轉換為空間坐標,并進行矢量化處理,其余視場恒星同理:
(1)
其中,(X0,Y0)為星敏感器透鏡中心在像平面下的坐標;f為星敏感器透鏡角距。
求得所有視場恒星在像空間坐標系下的矢量后,根據兩個星敏感器之間的安裝關系以及光軸夾角信息,可以求得矢量之間的旋轉矩陣,將其余視場矢量左乘與1a視場的旋轉矩陣,即可得到其余視場在1a坐標系下的矢量信息,如式(2)所示:
W12=A·W2
(2)
其中,A為旋轉矩陣;W2為其余星敏感器坐標系下的恒星矢量;W12為其余視場恒星在1a坐標系下的恒星矢量信息。
3 多主星模型的多視場星圖識別方法
本算法首先選取多個視場中的最亮星最為主星,通過匹配中心星概率的方法[19]對主星進行識別,即:計算主星與同一視場下其余所有星像點之間的星間角距,利用星間角距信息與導航星庫中存儲的角距值做對比,若角距差值小于匹配門限,則記錄導航星信息,同時記錄相同星號出現的次數,當完成匹配后,出現次數越多的星號越有可能是主星星號,由此得到多顆主星的主星候選星。主星確定后,選取主星中最亮的三顆星構成星等三角形模型。由于星等信息本身具有不穩定性,僅靠星等信息識別出來的結果的可靠性不好,而距離信息的可靠性強,因此,在構造星等三角形的基礎上,再以距離信息,構造距離三角形,采用距離信息與星等信息聯合的模式進行星圖識別,使得識別結果具有更好的可靠性。多主星模型構造完成后,在主星模型的基礎上,對其余副星(剩余未進行識別的星)進行識別。匹配識別的過程中,索引方式采用分段直線擬合的方法。
3.1 構建特征星庫
特征星庫作為星圖識別的依據,對識別可靠性以及效率問題產生直接的影響,是星圖識別中重要的一部分。多視場特征星庫的構建方法與單視場有所不同,多視場存在視場間恒星識別以及視場內恒星識別。當進行視場內星圖識別時,視場內星間角距值范圍應為(0,FOV)。若兩個星敏感器光軸之間夾角為θ,當進行視場間星圖識別時,視場間星間角距值范圍應為(θ-FOV,θ+FOV)。若按視場內特征星庫的構建方法來構建視場間特征星庫,則視場間特征星庫會包含大量的冗余信息,給匹配識別效率造成很大的影響。因此,本文在構建視場間特征星庫時,利用兩個星敏感器之間的安裝矩陣,以及星點信息估計視軸指向[20]。利用視軸指向定位天區。同時,為了減少特征星庫大小,在構建時,只保留兩個星序號信息以及角距信息,并且將求取的角距值擴大1×108,存儲為整形。
3.2 匹配識別
1)確定主星。恒星的亮度信息是判斷該恒星是否可以被星敏感器探測到的一個重要信息,原則上來說,在一幀星圖中,越亮的星可靠性越高。因此,本文算法首先對每個視場中的恒星按照星等信息進行排序,選取視場中最亮的星作為待識別的主星。
2)主星匹配。計算主星與其余同一視場下所有星像點之間的星間角距,將角距值與星號信息保存。利用索引方式,將角距值與導航星庫中存儲的角距值進行匹配,若二者角距差值小于匹配門限,則記錄導航星信息,并給予導航星一個標識count,初始值設定為0,用以記錄該星號出現的次數。在匹配的過程中,同一導航星重復出現,則count加1。當完成匹配后,出現次數越多的星號,即設定的標識count值越大的星號,越有可能是主星星號,由此得到主星候選星。由于導航星庫中存儲的星間角距集數量較多,二分查找會導致匹配效率低下,并且星間角距與序號之間的關系并非是嚴格意義上的直線關系,k-vector查找法也不完全適合與多視場視場間恒星的匹配識別,因此,本文索引方式采用的是分段直線擬合的方法。
如圖2所示,將星間角距組按照1°進行劃分,然后分段對星間角距與序號的關系進行直線擬合,粗實線和虛線交替分別表示不同段。具體公式如(3)式所示,ai,bi分別表示第i段星間角距組的系數。基于擬合的結果,查尋結果更精確可靠。

圖2 星間角距與星表序號的關系
(3)
3)利用星等信息構建主星模型。若視場數為2,則以兩顆主星為基準,構造星等三角形。選取除兩顆主星以外的次亮星作為第三顆星,與主星候選星對組成三角形,生成候選星等三角形。若視場數大于2,則以最亮的三顆主星為基準,構造星等三角形。
4)利用距離信息,構造主星模型。構造距離三角形時,由于1a中恒星像點沒有經過旋轉矩陣的轉換,因此以1a星敏感器中的主星為中心,確定兩個半徑R與r,在R于r之間選取距離中心星最近的兩顆星,生成距離三角形。圖3所示為視場數為2時,構造的主星模型示意圖。其中,a與b為兩顆主星,Δabc為星等三角形,Δade為距離三角形。若視場數大于2,星c應為第三個視場的主星。由此,則完成了階段性星圖識別。
5)副星識別。將剩余的所有副星分別與已識別的星相連,計算星像點角距,將滿足與已識別星星間角距差值小于匹配門限的星視為候選星,記錄下所有的候選星星對信息,若滿足星序號限制條件,則認為是正確的匹配結果,索引方法同樣采用分段擬合查找法。副星匹配示意圖如圖4所示。
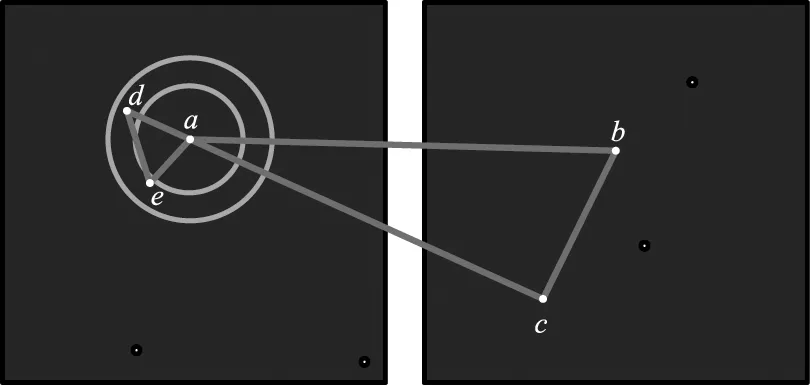
圖3 構造多主星模型
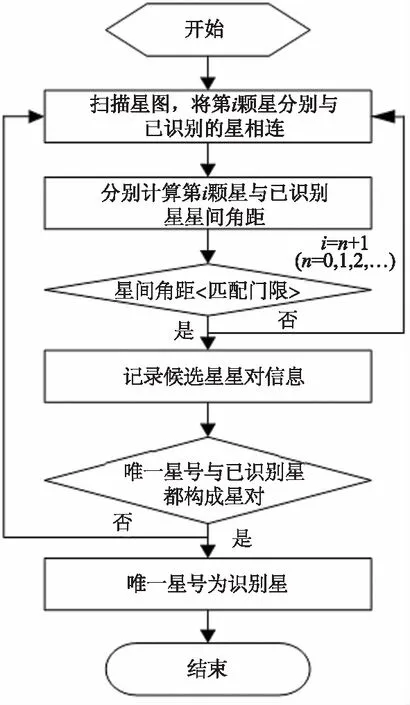
圖4 副星匹配流程圖
4 實驗分析與驗證
4.1 實驗條件
基于現有算法進行分析和歸納,選用目前識別率與可靠性較高的基于匹配概率中心星的星圖識別算法[19]與李葆華等人[21]的一種將角距和作為特征進行識別的多視場星敏感器的星圖識別算法作為對比,利用高分七號在軌測試數據分別對這兩種算法和本文提出算法的識別性能以及識別效率進行實驗對比分析。
實驗采取的基本星表為Hipparocs,主要用到的信息有星序號、赤經、赤緯以及星等信息。高分七號配備的星敏感器視場大小為8.9°×8.9°,面陣大小為2048×2048像素,星等選取的范圍為(0,6.5),共8669顆星,剔除雙星以及變星后,剩余8450顆星構成基本星表,實驗數據選取高分七號星敏感器下傳的星圖數據,共計十軌,2141幀星圖。圖5為高分七號星圖數據。

圖5 高分七號星圖數據
4.2 實驗結果與分析
4.2.1 識別結果正確性驗證
為了確定本文算法星圖識別結果的正確性,利用十軌數據的星圖識別結果分別計算拍攝時刻星敏感器的姿態信息。以768軌數據為例,給出定姿結果。姿態四元數如圖6所示,橫軸為星圖幀數,縱軸代表四元數q值,q0為標量,q1~q3為矢量。

圖6 姿態四元數
4.2.2 識別率對比及分析
對選取的十軌高分七號在軌測試星圖數據分別采用基于匹配概率中心星的星圖識別算法、李葆華等人提出多視場星圖識別算法及本文提出的算法進行星圖識別,三種算法的識別率如圖7所示,其中橫坐標為軌道號,縱坐標代表識別率。實驗共計2141幀星圖,其中,本文算法正確識別的星圖數為2133幀,識別率達到99.6 %。
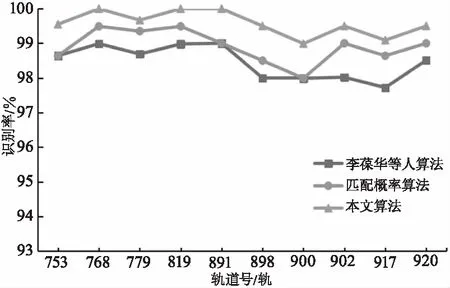
圖7 識別率對比
通過對三種算法識別率的對比,在十軌數據的對比實驗中,三種算法中本文算法識別率最高。對三種算法識別結果逐幀星圖進行分析比較,在三種算法均成功識別的前提下,本文算法識別出的星數目更多,可靠性更高。
為了探究影響多視場算法識別率的因素,從10軌數據中選取一軌數據進行深入分析。以2019年12月24日拍攝的768軌數據為例,該軌共198幀星圖,其中,以第3幀星圖為例,多視場三種算法識別的結果如表1、表2、表3所示。
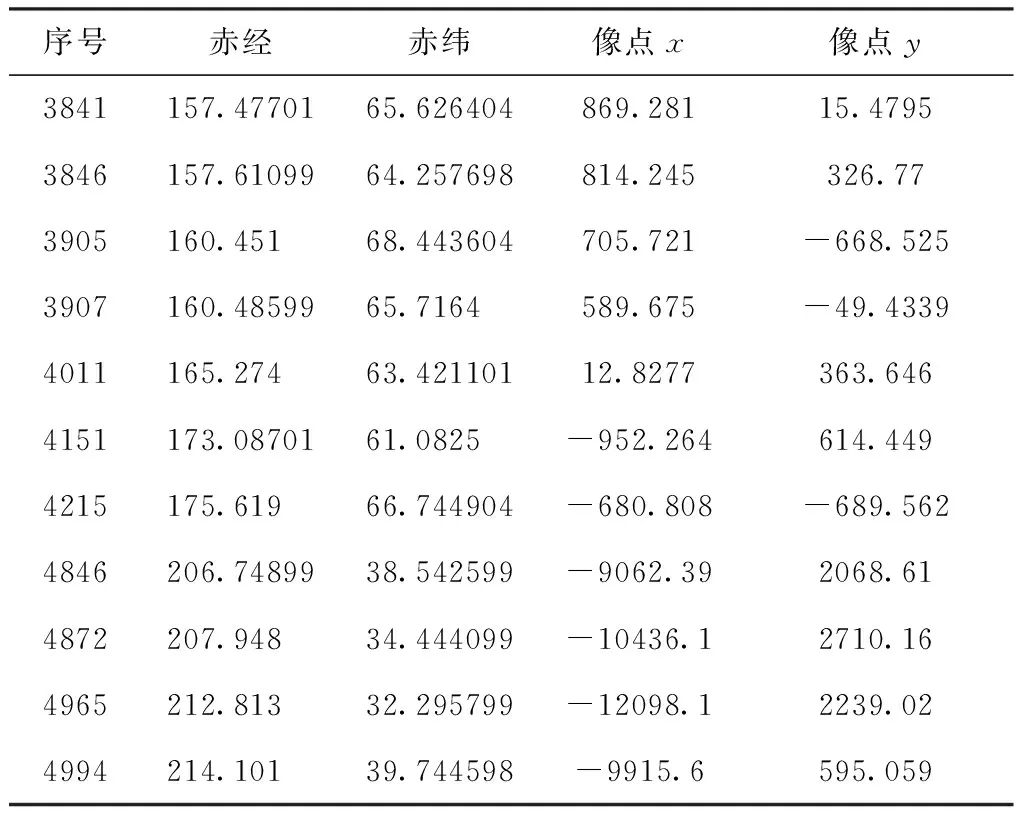
表1 本文算法識別結果

表2 匹配概率中心星算法識別結果
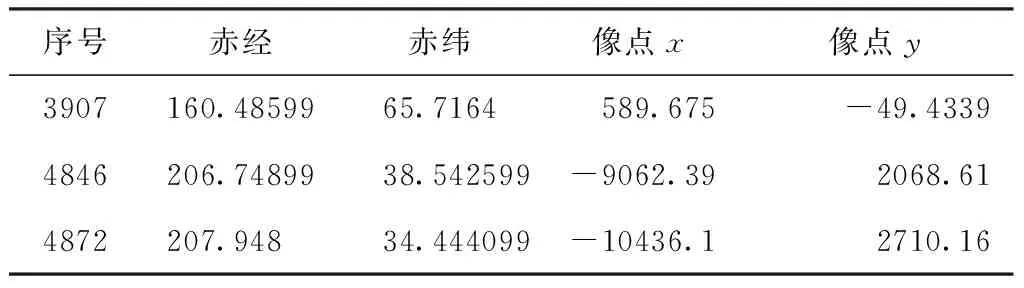
表3 文獻[21]算法識別結果
由表1、表2、表3結果可知,本文算法成功識別的星為11顆,匹配概率中心星算法成功識別的星為7顆,李葆華等人算法只識別出三顆主星,本文算法識別效果更好。三種算法均選用最亮星作為主星,最亮星為1b視場中的星,轉換后的像點為-10436.1,2710.16,成功識別后對應的導航星庫中的星號為4872。在此基礎上,本文算法選取的另一顆主星為1a視場中的最亮星,像點為589.675,-49.4339,成功識別后對應的導航星庫中的星號為3907。以星等為特征構建星等三角形,三顆星號分別為4872,、3907與4846,以距離作為特征構建的三角形三顆星號分別為3907、3841、3846。該幀星圖中,出現了主星過亮的情況,即當星的亮度達到一定程度后,星等信息反而會對識別結果造成負面的影響,同時,針對高分七號數據來說,當星過亮時,星圖數據會出現亮點灰度值飽和現象,也會對星圖識別結果造成影響。匹配概率算法以及李葆華等人算法均僅在此最亮星的基礎上進行其余副星識別,這是造成星圖識別結果不理想的主要原因。而李葆華等人算法三顆主星均為按照星等亮度選取的,因此造成了識別星數量低于匹配概率算法。同時,導致匹配概率算法以及李葆華等人算法識別失敗的原因,也同樣是此因素導致。而本文算法在引入星等信息的同時,又引入了距離信息,因此更好地保證了識別率。
5 結 論
本文針對目前已有多視場算法的局限性,提出了一種多主星模型的多視場星圖識別方法。該方法利用星敏感器之間的安裝關系,將其他視場星敏感器探測到的星點轉換到基準坐標系下的矢量,使得多個視場內的星點信息可以聯合進行識別。在匹配識別的過程中,提出了引入星等信息的同時,加入距離信息的模式,使得本文方法具有更高的恒星識別率,根據實驗結果來看,本文所提出的星圖識別方法識別率達到99.6 %,具有更好的可靠性。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
