基于塊匹配的激光條紋亞像素中心提取
2021-07-23 09:27:32邵新杰李曉磊唐香珺
激光與紅外 2021年6期
關鍵詞:結構
潘 碩,邵新杰,李曉磊,唐香珺
(陸軍工程大學石家莊校區車輛與電氣工程系,河北 石家莊 050003)
1 引 言
線結構光法是獲取被測物體表面三維信息的一種常用視覺測量方法,近年來在工業檢測、環境感知、地理、醫療及文物保護等領域得到廣泛應用[1~4]。該檢測方法使用相機采集激光發射器投射到三維物體表面的光條圖像,通過計算機解算光條信息獲取物體表面的三維特征。在實際測量過程中,采集圖像中光條寬度通常為幾個到幾十個像素,從圖像中精確提取光條中心是實現測量的關鍵步驟[5]。
進行線結構光檢測時,光條投射到三維物體表面,由于被測物體的表面特性、三維形狀、投影強度及環境光強不同,對激光條紋圖像的成像質量造成干擾,成為限制提取光條中心坐標精度的重要原因[6]。在線結構光中心提取的研究過程中,國內外學者提出了許多中心提取方法,其中邊緣提取法、閾值提取法、極值法、骨架細化法提取光條中心精度為整像素級,幾何中心法、灰度重心法、Steger方法,曲線擬合法的提取精度可以達到亞像素級[7],隨著測量要求的提高,在噪聲環境中提取精度更高、魯棒性更好的算法成為研究的重點。胡改玲[8]等在結構光條骨架上劃分窗口,對窗口內的像素采用自適應灰度加權重心法求得圖像的亞像素坐標,提取的光條中心光順性更好。王利等[9]引入距離變換提取條紋的中心像素,然后利用曲線擬合和重心法提取亞像素重心,結合光條寬度和灰度信息降低了圖像噪聲對提取精度的影響。LI等[10]通過最小二乘法計算出光條上每一點的方向向量和曲率值,構建沿法向量的自適應矩形窗口,在矩形窗口內并沿著法線向量的方向重新計算每個中心點的坐標,顯著提高了光條中心的提取精度。張佳等[11]提取ROI區域后采用自適應寬度的二次加權重心法確定光條中心,并通過斜率閾值對中心坐標進行均值優化,提高了光條中心提取的穩定性。
上述算法都在光條的中心像素附近生成了一定大小的窗口,利用光條的鄰域信息提取光條中心,相比傳統算法能夠在一定程度上減少噪聲及被測物體表面環境的影響,提高了算法的精度和穩定性。一般情況下,同一激光投射器產生的結構光條紋形狀單一,有固定模式的光強分布,在獲取的激光條紋圖像中呈現為相似的光條紋結構。在圖像獲取過程中,噪聲的存在造成了相似光條鄰域內的細小差異,提取全局圖像中具有相似結構的光條中心,將其均值作為其中心坐標,能夠有效減小噪聲干擾,提高提取精度。本文利用骨架細化法提取光條的中心像素,在中心像素鄰域內構建包含光條基本結構的圖像塊,通過塊匹配方式搜尋相似度較高的光條結構,利用圖像全局光條信息得到了更高精度的光條中心坐標。
2 光條中心提取算法
本文提取光條中心算法步驟如圖1所示。首先對拍攝的結構光圖像進行閾值處理,將其轉化為二值圖像,對二值圖像進行骨架細化,逐層剝離得到光條的中心像素。然后在每個中心像素鄰域內生成包含光條信息的圖像塊,將其作為光條中心亞像素坐標提取的基本單元。之后利用塊匹配的方法將圖像中具有一定相似度的圖像塊劃分為不同的塊匹配群組,求取組內光條結構的重心坐標,將同一群組的灰度重心坐標均值作為群組內亞像素坐標與其中心像素的坐標偏差,然后將坐標偏差與群組內圖像塊各自對應的中心像素坐標相加得到各自光條中心的亞像素坐標。
2.1 骨架細化算法
對結構光圖像進行骨架細化,得到光條中心的像素級坐標。首先對結構光圖像進行閾值分割,得到分割出光條輪廓的二值化圖像,然后對光條輪廓一層層細化,直至得到輪廓的單像素骨架,得到光條中心像素坐標。
對圖像進行二值化操作時,本文采用局部均值和標準差的閾值處理提取結構光條,在處理背景照明不均的圖像時能取到較好效果。該算法首先確定一個固定大小的模板,通過計算模板的標準差和均值確定模板中心像素點的的閾值,公式為:
其中,f(x,y)為處理前的圖像;g(x,y)為處理后的圖像;σxy,mxy分別為(x,y)鄰域像素的標準差和均值;a,b為常系數。遍歷整幅圖像,得到的二值圖像g(x,y)中光條區域為1,其余部分為0[12]。
對二值圖像進行骨架細化操作,將圖像中任意一點像素P1的3×3鄰域構造為圖2所示順序,對整幅圖像逐點運算,當P1=1時判斷其是否為輪廓點進行刪除操作,算法步驟如下:
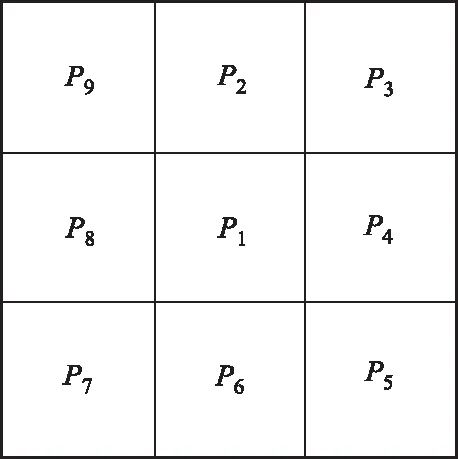
圖2 P1的3×3窗口內的9像素
(1)進行第1次子迭代時,如果滿足下列情況則刪除該點:
(a)2≤B(P1)≤6
(b)A(P1)=1
(c)P2·P4·P6=0
(d)P4·P6·P8=0
其中:
表示在P2,P3,…P8,P9順序下0、1模式的數量,B(P1)=P2+P3+P4+…+P8+P9,表示P1非零鄰域的個數。
(2)進行第2次子迭代,條件(c)、(d)變為:
(c′)P2·P4·P8=0
(d′)P2·P6·P8=0
其余條件不變,刪除滿足條件的點。
(3)重復步驟(1)、(2),直至沒有點被刪除后得到光條圖像的中心像素[13]。
2.2 塊匹配
塊匹配算法是運動估計、圖像濾波和視頻壓縮中的一種常用方法,該方法將圖像劃分為大小相等的圖像塊,選定其中一個圖像塊作為查詢塊與其他圖像塊進行匹配,找出與查詢塊具有相似特征的K個匹配塊,組成塊匹配數組。
在骨架細化法提取出的光條中心像素鄰域內生成大小為k×k(k為奇數)的圖像塊,將其作為提取光條中心坐標的基本單位,利用塊匹配的方式搜尋具有一定相似度的光條結構。結構光圖像I在中心像素生成圖像塊,其中P代表查詢塊,Q代表與查詢塊進行匹配的圖像塊,當P,Q之間的相似程度小于一定閾值時,認定兩者相似屬于同一分組,在搜索過程中,圖像塊的距離使用d(P,Q)表示:
(2)
式中,d表示兩個圖像塊之間的距離,分子表示查詢塊與匹配塊的模,分母表示圖像塊的大小。與查詢塊P的距離小于一定閾值的匹配塊組成分組SP:
SP={Q∈I|d(P,Q)≤τ}
(3)
τ表示匹配塊與查詢塊的相似度閾值,當兩個圖像之間差異的小于τ時,認定兩個圖像的相似度高,具有相同的光條中心坐標[14]。
2.3 光條中心的亞像素提取
分組SP內的光條圖像塊相似度高,含有相同的光條結構,將其坐標均值作為光條中心坐標真值可以降低噪聲對光條亞像素中心提取的干擾。
設C(xC,yC)為骨架細化法提取出的中心像素,P為以點C為中心的大小為k×k的查詢塊,SP={Qi∈I}為與該點相似的匹配塊集合,在每個匹配塊中采用灰度重心法提取光條中心。匹配塊內的中心點x方向的像素集合為Gx(x,y),y方向的像素集合為Gy(x,y),則光條中心在圖像中的亞像素定位可由重心法確定為:
(4)
(5)
n為SP中匹配塊的個數,對SP中所有的匹配塊求光條的中心坐標,最后將其均值作為該塊匹配群組中光條中心的亞像素坐標偏差:
(6)
(7)
最終確定光條在整個圖像的亞像素條紋中心坐標為:
(8)
(9)
通過上述方法遍歷所有的中心像素點,得到結構光圖像中所有光條的亞像素中心坐標。
3 仿真分析與實驗驗證
3.1 仿真分析
生成如圖3所示10條服從峰值為180,標準差為2的多線高斯分布的多線結構光仿真圖像,條紋中心橫向等距分布。在仿真圖像中加入均值為0,方差為0.01~0.05范圍的高斯噪聲,分別使用本文方法與基于骨架提取的灰度重心法提去不同噪聲圖像中的結構光條中心。圖4顯示出在不同噪聲環境中兩種方法光條中心提取坐標平均偏差的對比結果,從中可以看出塊匹配的方法能夠在復雜噪聲環境中提高提取精度,在不同的噪聲環境中均有較好的提取效果。

圖3 多線結構光仿真圖像
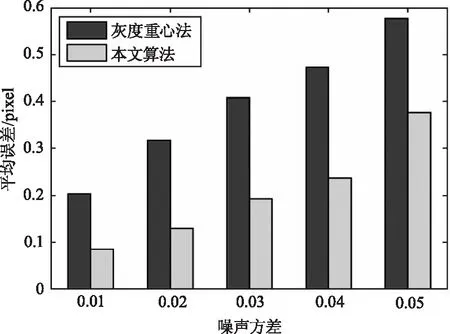
圖4 不同噪聲環境下的提取誤差對比
在仿真試驗中分別使用基于塊匹配的改進算法、傳統灰度重心法及Steger法分別提取噪聲方差為0.01圖像中的光條中心線,比較其效果。圖5為三種算法在提取光條中心線時的局部放大圖,可以看出灰度重心法在提取光條中心圖像時容易受到噪聲干擾,誤差較大,本文算法與Steger算法更為接近真實光條中心。圖6為使用三種算法提取的光條中心在不同光條上的的平均偏差。可以看出本文所提出的算法精度高于傳統的灰度重心法,平均偏差總體保持在0.05 pixel左右,誤差更小。
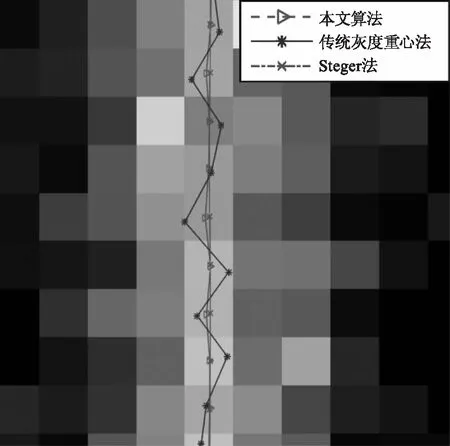
圖5 激光條紋中心提取結果對比
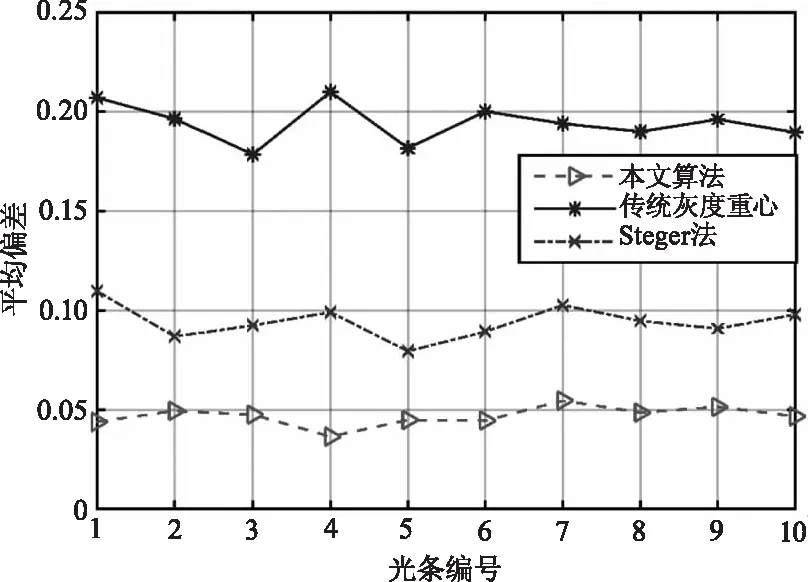
圖6 光條中心提取平均偏差對比
3.2 實驗驗證
為驗證本文提出方法的有效性,使用文獻[15]中的多線結構光測量系統對金屬平面工件進行測量實驗,圖7所示為實驗拍攝圖像。圖8所示為分別使用基于骨架提取的灰度重心法,Steger法和本文算法提取光條中心的放大圖像,可以看出,基于骨架提取的灰度重心提取算法受噪聲影響較大,提取出的光條中心較為散亂,Steger法提取的的光條中心在光條邊緣處有離散噪聲點存在,影響提取精度,本文算法提取的光條中心比較平滑,更為逼近真實的光條中心。
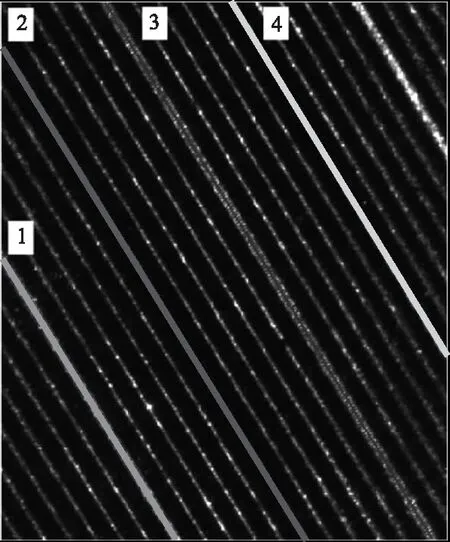
圖7 平面工件的多線結構光圖像
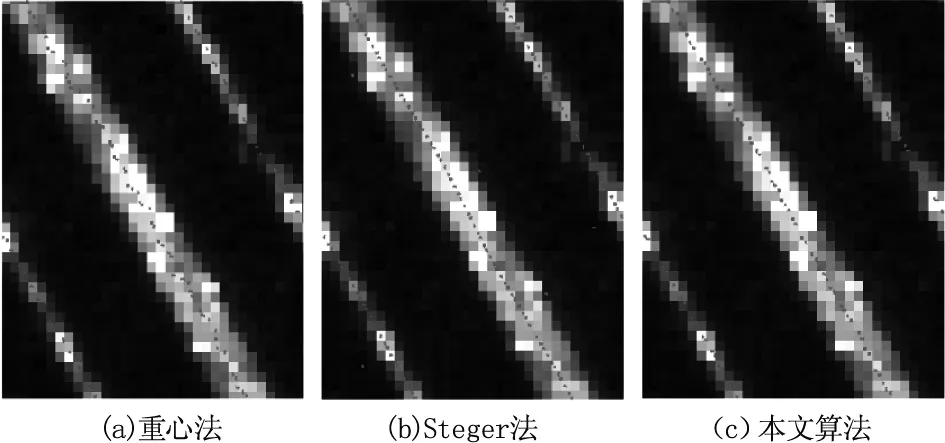
圖8 實驗條紋中心提取結果對比
線結構光在平面上的投影為一條直線,在實驗結果的基礎上,對提取的光條中心點進行直線擬合,分別計算每種方法提取中心點到直線的平均偏差,以表征光條中心提取的精度。表1為圖7中不同編號光條提取中心線的擬合結果。
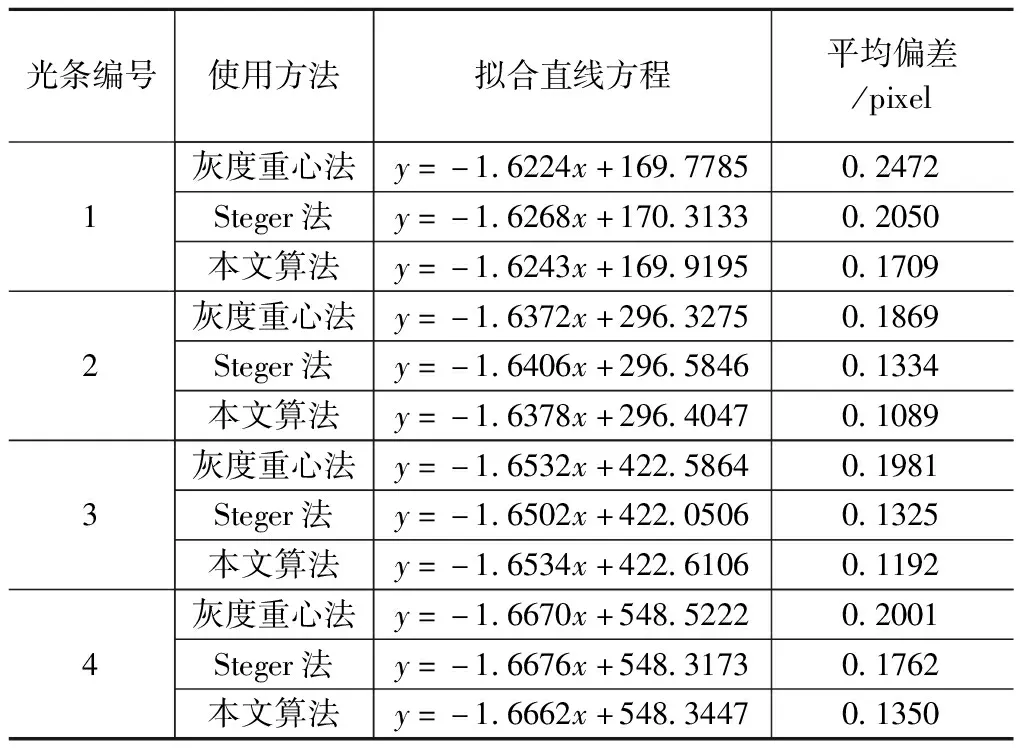
表1 光條中心提取實驗擬合結果及誤差
從表中可知,本文提出算法提取的光條中心平均偏差小于灰度重心法及Steger法,更加逼近真實的光條中心,抗噪能力更強,能夠在噪聲環境中提取較高精度的光條中心。
4 結 論
線結構光在提取光條中心時往往受到噪聲影響,限制中心提取精度,本文利用結構光圖像中的全局信息,通過塊匹配的方法將具有相似光條結構的圖像塊分組,求取每組圖像塊中光條的中心坐標,將其均值作為最終光條中心,減少了光條圖像隨機噪聲對提取算法精度的影響。在仿真分析過程中,對高斯光條施加均值為0,方差為0.01的高斯噪聲時,本文算法提取光條中心坐標精度優于傳統灰度重心算法和Steger法,平均偏差在0.1pixel內,同時實驗驗證本文提出的算法在實際光條提取過程中產生的平均偏差更小,能夠有效減少噪聲對光條中心提取精度的影響,具有較好的抗噪性。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
