基于機(jī)器視覺(jué)技術(shù)的鋼卷智能裝車系統(tǒng)
2021-07-22 02:44:12宋文宇史紀(jì)錄哲江龍姚天富
起重運(yùn)輸機(jī)械 2021年12期
關(guān)鍵詞:信息
孫 星 宋文宇 史紀(jì)錄 哲江龍 姚天富
1寧夏天地奔牛實(shí)業(yè)集團(tuán)有限公司 石嘴山 753001 2寧夏天地奔牛銀起設(shè)備有限公司 銀川 750000
0 引言
鋼廠在搬運(yùn)鋼卷時(shí),通常采用人工的方式,這種操作方式需要橋式起重機(jī)(以下簡(jiǎn)稱橋機(jī))司機(jī)與地面指揮人員緊密配合,工人勞動(dòng)強(qiáng)度大,定位精度依靠工人目測(cè)與經(jīng)驗(yàn)判斷,導(dǎo)致鋼卷需放置的位置定位不準(zhǔn)確,經(jīng)常會(huì)出現(xiàn)放置不到位,夾鉗夾傷鋼卷的情況,存在安全隱患。
針對(duì)這些問(wèn)題,有必要開發(fā)一種無(wú)人化鋼卷搬運(yùn)智能控制系統(tǒng),通過(guò)機(jī)器視覺(jué)自動(dòng)定位鋼卷運(yùn)輸車輛鞍座位置精確定位,無(wú)需人為手動(dòng)操作,實(shí)現(xiàn)鋼卷從庫(kù)區(qū)移動(dòng)至鋼卷運(yùn)輸車上。
1 總體方案設(shè)計(jì)
1.1 需求分析
鋼廠鋼卷搬運(yùn)過(guò)程需要鋼廠、鋼卷庫(kù)、運(yùn)輸車輛、橋機(jī)密切配合才能完成鋼卷的搬運(yùn)作業(yè),多數(shù)鋼廠的操作流程為運(yùn)輸車司機(jī)將鋼卷運(yùn)輸車輛停靠在帶運(yùn)輸鋼卷庫(kù)區(qū)的車輛停靠點(diǎn),橋機(jī)司機(jī)在司機(jī)室根據(jù)現(xiàn)場(chǎng)指揮人員指揮操作橋機(jī)大小車行走機(jī)構(gòu)、起升機(jī)構(gòu)的運(yùn)行及電動(dòng)臥卷夾鉗的開閉,從而把鋼卷從庫(kù)區(qū)夾取、運(yùn)輸?shù)戒摼磉\(yùn)輸車的鞍座上。若要改變現(xiàn)有操作方式,自動(dòng)完成鋼卷自動(dòng)搬運(yùn)到運(yùn)輸車輛上,自動(dòng)裝車系統(tǒng)應(yīng)需要以下幾個(gè)要求:
1)為了保證夾取、放置鋼卷位置正確,橋機(jī)需具有定位、搖擺控制功能;
2)能自動(dòng)識(shí)別運(yùn)輸車輛鞍座位置,并將位置發(fā)送給橋機(jī)控制器;
3)能在中控制實(shí)現(xiàn)對(duì)橋機(jī)的遠(yuǎn)程控制;
4)為了便于監(jiān)控橋機(jī)運(yùn)行狀況,在中控室上位機(jī)能夠?qū)驒C(jī)工作狀態(tài)、鞍座位置信息等實(shí)現(xiàn)在線數(shù)據(jù)監(jiān)控,能在中控室實(shí)現(xiàn)對(duì)橋機(jī)運(yùn)行畫面監(jiān)控;
5)具有鋼卷庫(kù)的庫(kù)區(qū)管理,實(shí)現(xiàn)鋼卷歷史信息記錄、查詢、鋼卷盤點(diǎn)功能;
6)鋼卷夾鉗通過(guò)橋機(jī)控制命令,自動(dòng)實(shí)現(xiàn)夾取、放置和旋轉(zhuǎn)等動(dòng)作。
1.2 自動(dòng)裝車工藝流程
結(jié)合目前鋼廠的操作流程,根據(jù)實(shí)現(xiàn)自動(dòng)裝車的需求,本文制定了以下自動(dòng)裝車流程:系統(tǒng)開始后,庫(kù)區(qū)管理系統(tǒng)生成運(yùn)輸工單,工單包括車輛需要運(yùn)輸?shù)匿摼硇吞?hào)、質(zhì)量等信息;同時(shí)庫(kù)區(qū)管理系統(tǒng)將待搬運(yùn)鋼卷的庫(kù)區(qū)位置信息通過(guò)無(wú)線通訊的方式發(fā)送給控制系統(tǒng)PLC控制器;運(yùn)輸車輛司機(jī)接到庫(kù)區(qū)管理軟件生成的工單后將車開至車輛停靠區(qū),在車輛停靠區(qū)域設(shè)置車輛到位確認(rèn)按鈕,車輛停靠到位后,運(yùn)輸車輛司機(jī)按下確認(rèn)按鈕確認(rèn)到達(dá)車輛停靠區(qū);位于車輛工業(yè)相機(jī)接到控制系統(tǒng)識(shí)別位置信息信號(hào),識(shí)別車輛輪廓、車輛相對(duì)于水平方向的偏轉(zhuǎn)角度、鞍座相對(duì)于車輛的平面位置信息及高度信息;識(shí)別后的信息通過(guò)無(wú)線通訊的方式發(fā)送給控制系統(tǒng),控制系統(tǒng)PLC控制器記錄識(shí)別信息為鋼卷放置做準(zhǔn)備,控制系統(tǒng)PLC控制器根據(jù)獲得庫(kù)區(qū)管理系統(tǒng)將待搬運(yùn)鋼卷的庫(kù)區(qū)位置信息控制變頻驅(qū)動(dòng)系統(tǒng),驅(qū)動(dòng)起重機(jī)大車機(jī)構(gòu)、小車機(jī)構(gòu)、起升機(jī)構(gòu)到達(dá)庫(kù)區(qū)待取鋼卷位置;與起升機(jī)構(gòu)相連接的電動(dòng)臥卷夾鉗裝置到位后,控制系統(tǒng)控制夾鉗夾取鋼卷,并根據(jù)夾鉗上到位檢測(cè)開關(guān)完成夾取動(dòng)作;控制系統(tǒng)PLC控制器根據(jù)之前工業(yè)相機(jī)識(shí)別的車輛及鞍座位置信息,控制變頻驅(qū)動(dòng)系統(tǒng)驅(qū)動(dòng)起重機(jī)大車機(jī)構(gòu)、小車機(jī)構(gòu)、起升機(jī)構(gòu)到達(dá)車輛鞍座位置,通過(guò)控制起升機(jī)構(gòu)上下運(yùn)行監(jiān)測(cè)鋼卷是否放置到位;當(dāng)鋼卷放置到鞍座后,控制系統(tǒng)控制夾鉗打開,起重機(jī)回歸系統(tǒng)設(shè)置的初始位置,自動(dòng)完成從庫(kù)區(qū)取鋼卷到將鋼卷放置到運(yùn)輸車輛上的整個(gè)過(guò)程。
2 系統(tǒng)功能介紹
系統(tǒng)以西門子PLC作為主控制器,配合旋轉(zhuǎn)編碼器、變頻器、觸摸屏、工控機(jī)配合相應(yīng)網(wǎng)卡、視覺(jué)識(shí)別設(shè)備、電動(dòng)臥卷夾鉗組成。為了完成鋼卷自動(dòng)裝車工藝流程,需要各個(gè)功能進(jìn)行技術(shù)支撐。
2.1 橋機(jī)定位、搖擺控制
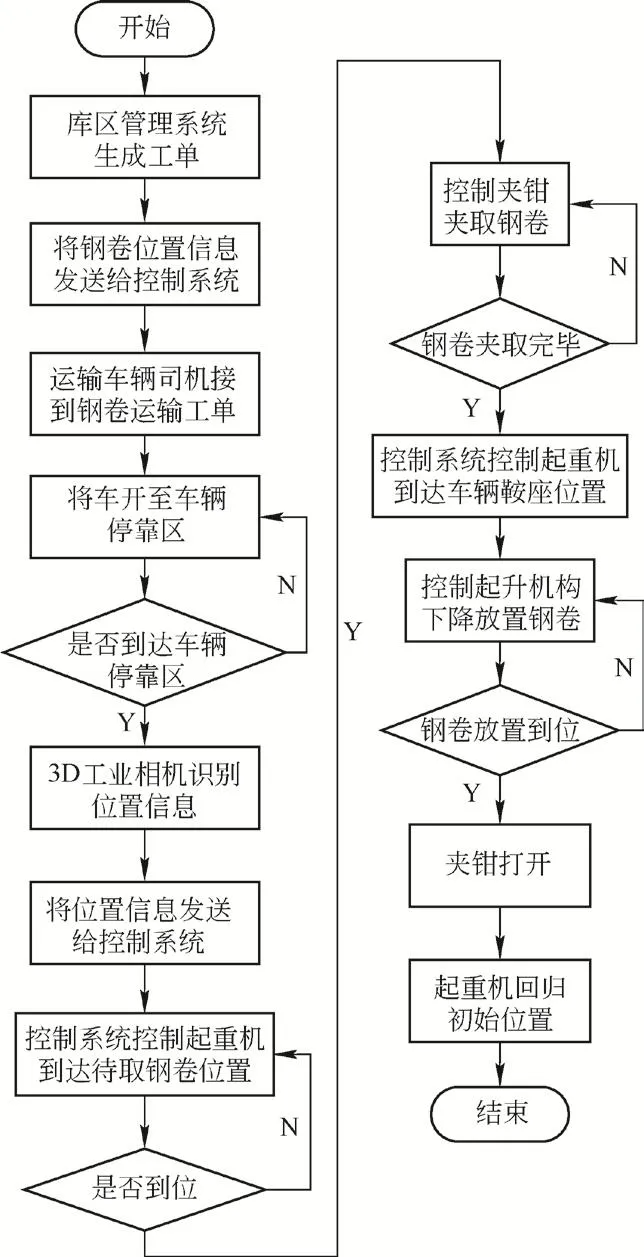
圖1 鋼卷自動(dòng)裝車工藝流程
橋機(jī)定位控制采用位置傳感器實(shí)時(shí)檢測(cè)大小車、起升機(jī)構(gòu)的位置信息,控制系統(tǒng)根據(jù)反饋信息做閉環(huán)控制來(lái)控制橋機(jī)到達(dá)位置,橋機(jī)搖擺控制采用變頻器防搖卡,變頻器可根據(jù)速度信息通過(guò)內(nèi)部控制模型自動(dòng)實(shí)現(xiàn)搖擺控制。
2.2 運(yùn)輸車輛鞍座位置識(shí)別
鞍座位置識(shí)別采用視覺(jué)識(shí)別技術(shù),通過(guò)工業(yè)相機(jī)采集鞍座圖像,利用快速特征識(shí)別算法識(shí)別圖像特征,并提取像素坐標(biāo),然后相機(jī)將像素坐標(biāo)轉(zhuǎn)換為實(shí)際坐標(biāo)。通過(guò)對(duì)實(shí)際坐標(biāo)值運(yùn)算,得到與PLC控制器通訊所需信息。最后將所需信息排列為通訊協(xié)議規(guī)定內(nèi)容,將格式化結(jié)果發(fā)送給PLC控制器。鞍座識(shí)別位置流程見圖2。
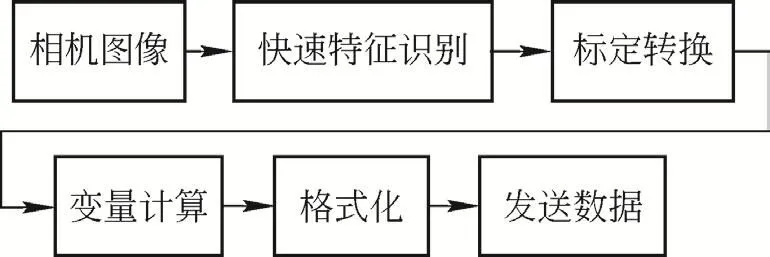
圖2 視覺(jué)識(shí)別鞍座功能流程圖
2.3 中控室遠(yuǎn)程控制及橋機(jī)運(yùn)行狀態(tài)數(shù)據(jù)
無(wú)線遠(yuǎn)程控制功能采用無(wú)線傳輸技術(shù),通過(guò)無(wú)線傳輸設(shè)備將中控室操作數(shù)據(jù)傳輸給橋機(jī)控制器,在中控室實(shí)現(xiàn)遠(yuǎn)程控制橋機(jī)。同時(shí),中控室也可通過(guò)無(wú)線傳輸設(shè)備將橋機(jī)控制器數(shù)據(jù)發(fā)送至中控室,在中控室實(shí)現(xiàn)上位機(jī)數(shù)據(jù)監(jiān)測(cè)。如圖3所示,上位機(jī)監(jiān)測(cè)包括用戶登錄、用戶注銷、主界面、物料管理、庫(kù)存信息、主鉤影像、定位影像、大小車起升機(jī)構(gòu)趨勢(shì)圖、故障報(bào)警等界面。
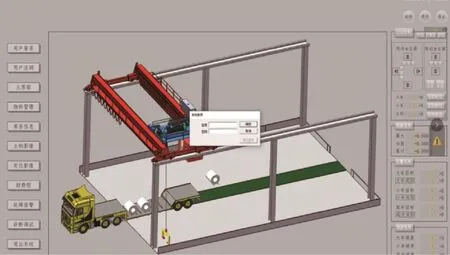
圖3 中控室上位機(jī)遠(yuǎn)程控制及橋機(jī)狀態(tài)數(shù)據(jù)監(jiān)控圖
2.4 橋機(jī)運(yùn)行畫面中控制監(jiān)控
橋機(jī)運(yùn)行畫面監(jiān)控主要是主鉤的監(jiān)控,設(shè)置在大車兩個(gè)端梁之間。視頻監(jiān)控圖像在司機(jī)室和中控室分別顯示。司機(jī)室設(shè)置有硬盤錄像機(jī)可以實(shí)時(shí)顯示主鉤狀況及過(guò)去近半個(gè)月的錄像回放。在中控室同樣可以實(shí)時(shí)顯示主鉤監(jiān)控畫面,數(shù)據(jù)的傳輸采用一對(duì)無(wú)線網(wǎng)橋完成無(wú)線通訊。功能原理如圖4所示。

圖4 視頻無(wú)線傳輸原理圖
2.5 鋼卷庫(kù)庫(kù)區(qū)管理
鋼卷庫(kù)管理系統(tǒng)通過(guò)可以實(shí)現(xiàn)鋼卷出入庫(kù)區(qū)物料的記錄,系統(tǒng)具有庫(kù)區(qū)物料的盤點(diǎn),自動(dòng)存儲(chǔ)搬運(yùn)物體位置數(shù)據(jù),自動(dòng)規(guī)劃搬運(yùn)路徑,庫(kù)區(qū)管理系統(tǒng)見圖5。
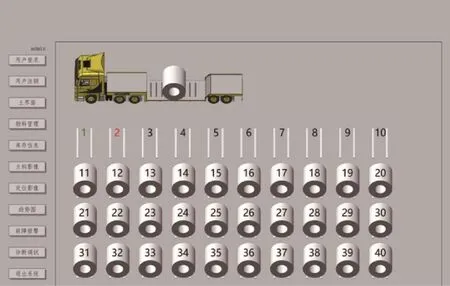
圖5 鋼卷庫(kù)庫(kù)區(qū)管理系統(tǒng)界面
2.6 智能電動(dòng)臥卷夾鉗
智能電動(dòng)臥卷夾鉗主要由吊架裝置、橫梁、左右平移機(jī)構(gòu)、旋轉(zhuǎn)機(jī)構(gòu)、自鎖機(jī)構(gòu)、鉗腿、支撐底座、液壓潤(rùn)滑系統(tǒng)、電纜卷升裝置和電氣及控制系統(tǒng)等組成。智能電動(dòng)臥卷夾鉗可以實(shí)現(xiàn)根據(jù)橋機(jī)的控制命令自動(dòng)實(shí)現(xiàn)鋼卷的夾取與放置,當(dāng)夾取或放置鋼卷有角度要求時(shí),旋轉(zhuǎn)夾鉗自動(dòng)旋轉(zhuǎn)到需要的角度再實(shí)現(xiàn)張開或閉合動(dòng)作,實(shí)現(xiàn)智能夾取。夾鉗還設(shè)置有多重檢測(cè)和保護(hù)開關(guān),如夾緊限位、開度限位、旋轉(zhuǎn)限位,鋼卷防夾傷限位等。
3 結(jié)論
在中國(guó)制造 2025 與智能工廠發(fā)展變革的大背景下,伴隨著鋼鐵行業(yè)處在產(chǎn)能過(guò)剩、同質(zhì)化競(jìng)爭(zhēng)激烈、盈利能力下降的情況下,鋼鐵企業(yè)必然向降本增效的智能化方向發(fā)展。通過(guò)現(xiàn)場(chǎng)應(yīng)用與人工操作相比,本控制系統(tǒng)優(yōu)點(diǎn)為:
1)真正實(shí)現(xiàn)了無(wú)人控制下鋼卷自動(dòng)搬運(yùn)到運(yùn)輸車輛鞍座流程,節(jié)省了人力資源;
2)基本消除了搬運(yùn)過(guò)程中鋼卷?yè)u擺現(xiàn)象,定位準(zhǔn)確;
3)降低了鋼卷作業(yè)的安全風(fēng)險(xiǎn)性、提高了作業(yè)效率;
4)實(shí)現(xiàn)了鋼卷庫(kù)的信息管理、提高了鋼廠的信息化水平。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
