淺談雷達和ADS-B信號監控系統
2021-07-19 22:54:55朱翊
電腦知識與技術 2021年13期
關鍵詞:自動化
朱翊

摘要:隨著航班流量的日益增多,空域環境的日漸復雜,一旦雷達信號或ADS-B信號中斷未能及時處理,將會造成嚴重的影響。雷達和ADS-B信號監控系統有著廣泛的應用前景,可推廣至各個空管運行單位、部隊、氣象中心等使用,提高運行保障能力。本文就湛江空管站近期主、備用自動化接入的ADS-B信號,談一下ADS-B信號接入自動化的配置等問題,以供分享與探討。
關鍵詞:ADS-B信號;雷達信號;自動化
中圖分類號:TP393? ? 文獻標識碼:A
文章編號:1009-3044(2021)13-0170-04
1引言
ADS-B系統是由多地面站和機載站構成,是一種合作監視技術。飛機定時廣播通過衛星導航系統獲得的位置信息(位置、高度、速度、航向、識別號及其他信息);與傳統雷達系統相比,ADS-B不僅提供更實時準確的監視信息,還具有建設成本少、數據精度高、使用壽命長等明顯優勢。近些年我國對ADS-B技術進行大量的研究,已研制出ADS-B發射和接收設備;并通過地空數據鏈將信號下發給地面站,經過數據中心的目標檢測和多重驗證后再進行應用。在空中,相比傳統A/C模式雷達信號,ADS-B信號對于頻率的占用率大大減少,信號糾錯和解碼能力將增強。在地面,利用ADS-B數據源,能加強對場面運行航空器的監視,減少地面沖突的發生。ADS-B技術作為一種新型的監視方式,它是基于衛星導航和地空數據鏈通信系統,能有效克服由于雷達測距定位位置信息不準確的缺點,且具備更高的數據精度和數據更新率。實時的飛行位置等數據,能夠提高飛行效率。
2湛江ADS-B系統架構介紹
湛江地區ADS-B系統共建設地面站3個,三級數據站1套,其中定向+全向配置地面站點1個,全向配置地面站點2個,已完成現場驗收工作,并已在AeroTrac自動化系統測試平臺中接入ADS-B信號,已完成了主用自動化系統、備用自動化系統的接入參數配置。
2.1 ADS-B地面站系統
ADS-B監視在湛江有三個地面站分別在:江洪、下洋、航管雷達站;各地地面站通過FA36傳輸系統以及光纖、運營商進行信號傳輸。其中航管雷達站又有定向地面站和全向地面站,它們分別由定向子系統、全向子系統、本地監控維護終端以及其他設備組成。
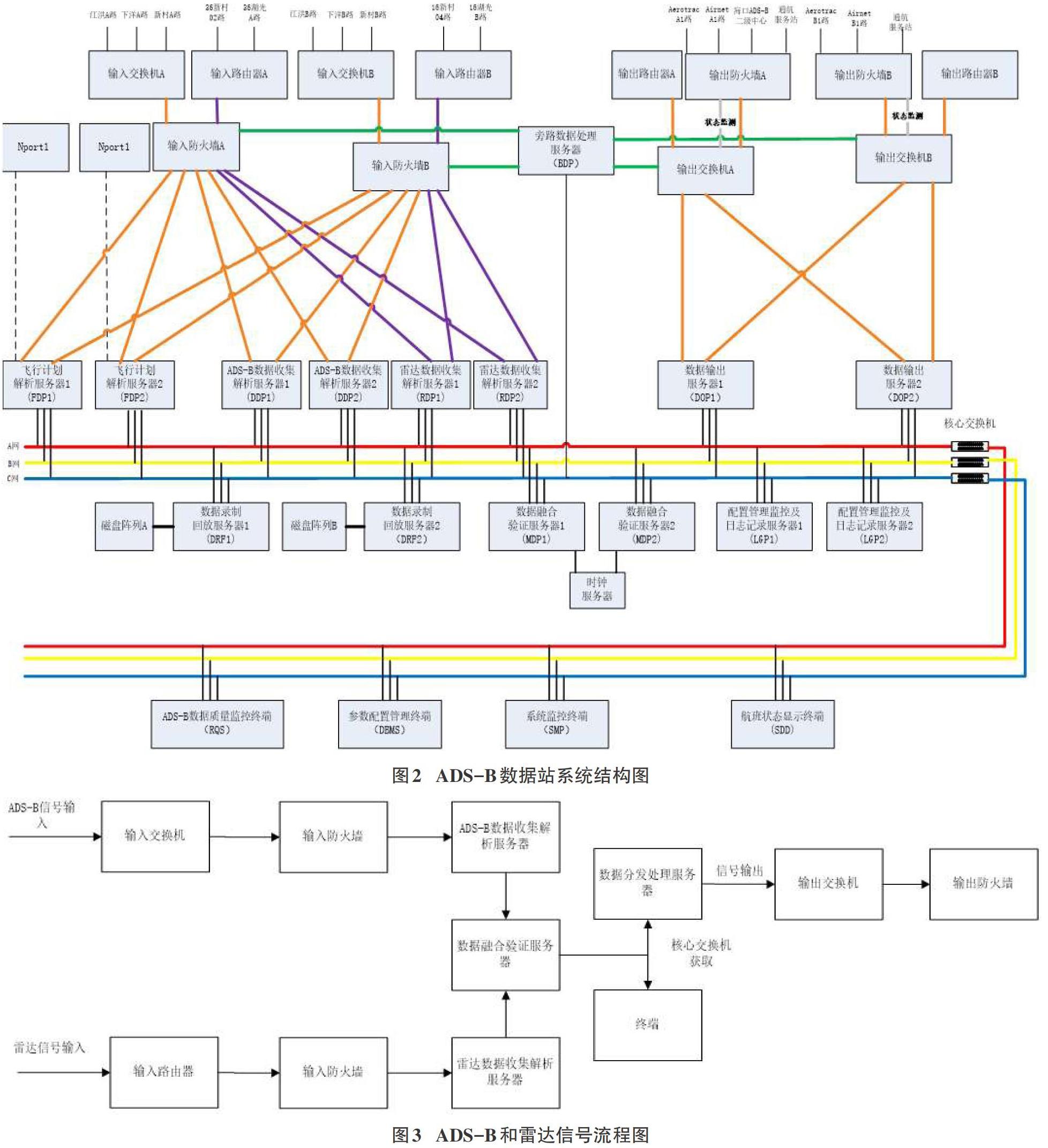
2.2 ADS-B數據站系統
ADS-B數據站能夠根據實際應用需求引接ADS-B地面站數據,經過處理后為所轄地區的中低空管制中心、進近、塔臺等空管部門提供ADS-B實時綜合監視信息,同時實現對本區域內ADS-B地面站的監控。
2.3 雷達信號、ADS-B信號在數據站接入、融合
江洪、下洋、新村三路ADS-B信號和新村、湖光兩路信號分別通過交換機、路由器、防火墻輸入到DDP進行數據解析、融合驗證。融合為一路的ADS-B信號分別輸出給二級中心站海口、通航服務站、主備用自動化使用。ADS-B和雷達信號流程如圖3所示。
3 ADS-B數據站系統關鍵性功能
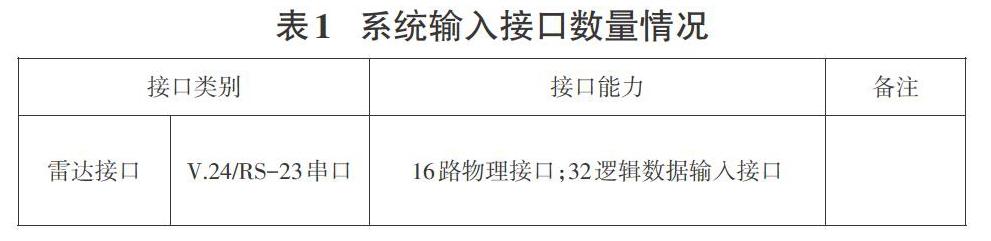
3.1數據接入能力
湛江空管站三級數據站的輸入接口數量設計情況如表1所示:
3.2數據驗證功能
系統具有目標信息防偽處理功能,通過多種方式來甄別可疑的ADS-B目標報告。被判定為可疑的目標在本系統的態勢界面上予以醒目的提示,并同時說明判定依據。在向系統外輸出數據時,可人工控制可疑目標是否輸出。
系統采用的可疑目標驗證方式為以下三種:
(1)覆蓋符合性驗證:
如果地面站定義了最大有效覆蓋范圍,則當其報告的某個目標不在這一范圍內時判定為未通過此項驗證。
(2)覆蓋交叉驗證:
在ADS-B和雷達等其他監視數據的重疊覆蓋范圍內,ADS-B發現了目標但其他監視數據沒有發現,則此目標判定為未通過此項驗證。
(3) TDOA時標定位驗證:
某個ADS-B目標的位置報告與利用高精度時標進行的多地面站定位計算出的結果不符,則判定為未通過此項驗證。
以上三種目標驗證方式在對最終目標是否可疑的結論的影響上具有不同的優先級。TDOA時標定位驗證具有最高的優先級,覆蓋交叉驗證其次,覆蓋符合性驗證最低。
湛江空域實際的目標數據驗證情況統計如下(6小時):
說明:可疑目標包括TDOA時標定位驗證、覆蓋交叉驗證、覆蓋符合性驗證三種情況。未知目標為航跡剛開始建立時,需要一個周期來進行確認。湛江目標驗證情況未知是由于系統設置為4個以上站點時系統進行TDOA驗證。
3.3數據融合功能
理論定義上,系統融匯規則是“當確定了多個ADS-B數據為同一時刻的同一目標之后,將其匯成一個ADS-B點跡,系統獲得關于目標更準確,全面的信息。系統能夠處理重復、跳變等異常數據。對某個目標同一時刻的數據,各地面站接收的ADS-B數據是一樣的,理論上從不同地面站發出的數據內容也應該一致”。然而實際上,不同地面站的報文版本可能并不一致,高版本的相對低版本的信息更全面。另外一方面,有些基站可能長時間未收到某類信息,使得該基站不含有該信息或該信息保持了歷史的而未被更新。因此在數據融匯時主要完成兩個工作:
(1)在所有接收到的地面站數據中,如果有高版本的目標數據,優先在高版本地面站中選擇距離目標最近的站點作為優選站點。如果沒有高版本的基站數據,或者說只有0.26版本的數據,則選擇離目標最近的站點作為優選站點除航班號、二次代碼、高度、速度、航向等信息外,其他信息使用優選站點的數據。
(2)優選站點中可能并不包含航班號、二次代碼、高度、速度和航向信息,或者即使包含了該信息,但可能也是被保持的歷史數據。這幾種類型的數據由收到的所有基站信息融合而成。當某一個基站中包含該信息時,則綜合包含該信息。當不同基站含有的同類信息不同時,如某些基站收到了更新的二次代碼,但有些基站未收到,使得不同基站的二次代碼不同,綜合選擇時盡可能地選擇更新的二次代碼作為綜合數據。
4 ADS-B(雷達)信號配置實例
本實例描述在多冗余備份RDP系統中如何增加一路ADS-B信號(雷達),并配置其端口接入,并相應的修改DP工作站雷達顯示列表的過程和步驟。為了運行 configure_radars指令,RDP服務器需要設為脫機。一般情況下,增加或更改雷達配置參數首先在RDP備機上執行,修改完畢后,再通過服務器主備切換,更改剩下其余的RDP。這樣做,可以使修改參數對運行的影響時間達到最小。如有條件,可在測試平臺先行修改,觀察參數修改后系統運行情況。
4.1 ADS-B信號(雷達參數)配置
(1)確定服務器以ATCsite用戶登錄,并在工作目錄:/export/home/ATCsite;
(2)通過kill_rdp指令使需修改參數的RDP服務器處于脫機狀態;
(3)在RDP上執行configure_radars來設置需要的ADS-B配置;
(4)通過configure_radars菜單Add a radar增加一路雷達來配置ADS-B信息;
(5)通過configure_radars菜單Add a port connection增加一個ADS-B端口連接信息;
(6)通過configure_radars菜單List port assignment,檢查并確認新增ADS-B參數及端口數據無誤。
(7)通過exit選項離開configure_radars菜單配置完成后會在/export/home/ATCsite目錄下生成一個input***.dat的文件,***對應的是端口號,將該端口號填入Wan_rcvr_config0文件中(link項),為ADS-B配置和網絡配置之間建立聯系。
4.2 網絡配置
(1)配置 /etc目錄下的網卡文件hostname.ce2(ce2目前可用于接收ADS-B信號)。
(2)將hostname.ce2命名為hosts文件所用名(rdp01_adsb)。
(3)配置 /etc目錄下的hosts文件,在該文件下增加一行 “192.168.9.50? rdp01_adsb”與ADS-B轉發器廣播的IP地址處于同一個網段。
(4)配置 /export/home/ATCsite目錄下的Wan_rcvr_config0文件,該文件說明如圖4所示。
l該文件第一行為網卡名,如將ADS-B配置在hostname.ce2,則應在第一行填入hostname.ce2文件內容:rdp01_adsb,該名字應于LAN_NIC_MAP.DAT中的網卡名相同;
l該文件第二行為鏈接號,這個與configure_radars中指定的ADS-B端口號相同;
l該文件第三行為ADS-B網絡接收的端口號,該端口號應于ADS-B轉發器所用的廣播端口號一致,目前使用33000端口;
l第四行為網絡接收方式,B:廣播方式接收,M:組播方式接收;
l第五行為組播地址;
l該文件的最后一行是-1,代表文件結束。
注:之后添加鏈接無須再填入網卡名,直接填入連接號、端口號、廣播或組播和地址即可。
(5)配置 /export/home/ATCsite目錄下的LAN_NIC_MAP.DAT文件,該文件說明如圖5所示。
lLANNAME對應Wan_rcvr_config0文件的內容rdp01_adsb;
lNIC對應網卡文件名后綴,ce2;
l該文件的最后一行是-1,代表文件結束。
(6)重啟RDP主機,在RDP上執行rdp&指令來啟動RDP程序,此時,增加ADS-B配置已生效。
4.3 DP工作站雷達列表更新
4.4再新增一路ADS-B信號
(1)新增hostname.xxx文件,在hosts文件中新增。
(2)拷貝Wan_rcvr_config0,重命名為Wan_rcvr_configX(X=1至63),修改相應的網絡參數,如下圖新增的一路。
(3)在LAN_NIC_MAP.DAT新增網絡對應關系如下圖;
5空管自動化系統ADS-B數據應用
現階段我們湛江將ADS-B接入主用自動化系統中作為一路監視使用,這一舉措大大增強了對于監視目標的覆蓋能力。也解決了長期因湖光雷達停機維護導致低高度目標看不見的問題。目前接入后存在的問題主要有:主用Telephonics自動化系統不處理“Target Report Descriptor”的Ground Bit項,在DP上仍顯示Ground Bit=1的航跡。在Telephonics自動化系統不可能進一步升級的情況下,ADS-B數據站廠家已于2019年4月初升級軟件,在ADS-B數據站系統中增設屏蔽地面目標選項,進而在輸出到自動化系統前對地面目標“Ground Bit=1”的航跡進行過濾。解決了不必要的地面目標對管制的干擾問題。并且在2019年9月份進行了一次全系統升級,優化各個系統機制,增加了對GNSS完好性和精度不足的ADS-B信息進行過濾功能;可疑目標判定時,采用對不同空域類型采用不同參數。
信號接入系統后,并且以特定符號顯示和區分單雷達目標、ADS-B和雷達的融合目標、雷達融合目標。系統會將雷達數據與 ADS-B 數據進行融合處理,產生的系統航跡質量會不低于參與融合處理的任何一個監視數據的航跡質量;航空器下發ADS-B位置報告數據的NUC、NIC、SIL應當滿足規章要求,通常ADS-B位置報告數據的NUC值不得低于5或者NIC值不得低于6或者SIL值不得低于2。如果位置報告數據的精度低于以上的數值,則在管制員的人機界面上顯示ADS-B位置報告,并給予視覺提示。
6結語
廣播式自動相關監視ADS-B作為空管監視新技術逐漸應用推廣;ADS-B系統是下一代航空運輸系統通信協議的一部分,我國近些年已研制出ADS-B發射和接受設備。提高ADS-B系統檢波能力能夠提高ADS-B系統的接收范圍和數據解算精度,對飛機進行準確定位具有重要的意義,尤其是在干擾信號復雜、雨天、霧天等遮擋。此外,還能有效克服由于雷達測距定位位置信息不準確的缺點,且具備更高的數據精度和數據更新率。目前湛江空管站已于2020年初,將ADS-B信號全高度接入主備自動化系統,為管制員提供了多種監視保障;與雷達監視相輔相成,降低了因設備影響空中交通管制的風險概率。
參考文獻:
[1] 邱志豪,李百鋒,王劍峰.空管ADS-B地面站設備測試平臺的研究與實現[N].“安康杯”論文集,2016年12月.
[2] 余闐.淺析烏魯木齊空管中心ADS-B接入自動化系統優化與研究[J].科技創新與應用,2017(31):193-194.
[3] 胡洋.ADS-B數據處理中心的設計與實現[J].電子測試,2018(4):80-82,89.
[4] 宮利蘋.南京ADS-B數據站功能及接入自動化系統的分析[J].中國科技縱橫,2019(13).
【通聯編輯:梁書】
猜你喜歡
經營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 21:28:54
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:49:55
科學與財富(2016年28期)2016-10-14 19:33:38
科學與財富(2016年28期)2016-10-14 03:14:22
