迷你仿生殺蟲機器人的設計與探究
2021-07-19 22:11:32梅杰周浩王漬宇趙文豪胡皓文鄭萬闖韓芳
電腦知識與技術 2021年14期
梅杰 周浩 王漬宇 趙文豪 胡皓文 鄭萬闖 韓芳
摘要:針對大多數家庭面對害蟲問題束手無策現象,該探索旨在設計一種能夠代替人自動殺蟲作業的家用迷你機器人,幫助大多數家庭解決害蟲困擾。該機器人采用傳感器以及蟻群算法技術,能自主勘探害蟲出沒、探測路面的狀況;底部采用履帶式移動和伸縮的機械臂,提高移動的穩定及角落害蟲捕捉的高效性,會對已確認的害蟲自動進行化學藥劑噴灑。實驗結果表明該機器人能實現規劃最優路徑、快速辨識害蟲類別,可達到普通家庭的使用要求,具有靈活高效的捕捉能力。
關鍵詞:殺蟲機器人;蟻群算法;機械臂;單片機;傳感器
中圖分類號:TP242? ? ? 文獻標識碼:A
文章編號:1009-3044(2021)14-0169-03
Abstract: Aiming at the phenomenon that most families are at a loss when facing the pest problem, this paper explores the design of a kind of household mini robot that can replace the human automatic pest control operation to help most families to solve the pest problem. Using sensors and ant colony algorithm technology, the robot can independently detect the presence of pests and the condition of the road. Crawler moving and telescopic robotic arms are adopted at the bottom to improve the stability of movement and the efficiency of pest capture in corners. Chemical spraying will be carried out automatically on confirmed pests. The experimental results show that the robot can realize optimal path planning, quickly identify pest categories, meet the requirements of ordinary families, and has a flexible and efficient capture ability.
Key words: insecticide-killing robots;ant colony algorithm; mechanical arm;singlechip;sensor
1引言
伴隨著科技的進步,琳瑯滿目的機器人的應用也非常廣泛,但是能夠替代人進行捕捉害蟲的機器人的發展的還很初步。害蟲捕捉的方式多種多樣,應用紅外線對射技術設計的害蟲捕捉器不僅準確率高,而且可移動性強。本文探索設計一個注重捕捉能力的迷你仿生殺蟲機器人[1],機器人在紅外對射技術的基礎上增加機械臂定位導航系統、雙目視覺系統,使得機器人在捕捉害蟲方面準確性更高。機器人在機械設計方面采用六自由度機械臂[2],目前使用六自由度機械臂的設計多數局限在農業方面,涉及在其他方面應用的并不多,本文探索將該技術應用在殺蟲機器人上,解決人無法達到的地方來輔助捕捉害蟲[3]。本文探索設計的機器人能夠進一步生活化,符合大眾的設計要求,利用現代的人工智能技術實現全自動化識別和捕捉。
2 設計思路
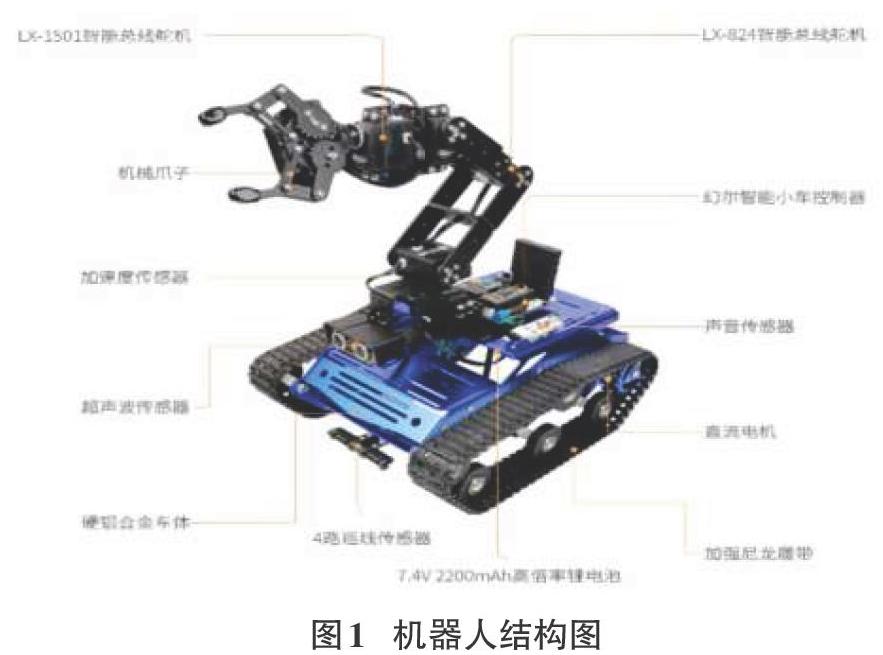
該機器人整體設計結構是底部采用履帶式,兩條履帶旋轉運行以保證在任何路況的穩定性,履帶的上面攜帶方形身體,身體之上是捕捉害蟲最關鍵的六自由度機械臂。機械桿在遇到特殊情況就會像雨傘桿壁一樣伸長,使得最上方的360°攝像頭可以升高降低。這個機器人身體頂部往外的六自由度機械臂,機械臂端口有一個可以活動的架子,用來通過機械臂捕捉害蟲。
機器人基本工作原理是:第一步,通過熱傳感確定害蟲所在大致空間的位置,并移動到合適的起始位置。第二步,利用蟻群算法規劃最優路徑并實施跟蹤操作。第三步,定位到害蟲位置,向六自由度機械臂末端執行器發送指令抓捕害蟲。第四步,從機械臂末端噴發器噴灑藥物捕殺害蟲或者利用機械爪子捕捉害蟲。
3 功能設計
3.1 路徑規劃
本設計為了更好地適用于在家庭的特殊環境中捕捉害蟲,使用了蟻群算法來規劃最優路線。傳統蟻群算法無法快速得出最優路線,且容易得到局部最優解的錯誤解,本設計采用文獻[4,5]中提出的改進版的蟻群算法,并且對原有的蟻群算法進行適當的改進,擴大了目標點對路徑搜索的吸引力。即:
f(n) = ng(n) + (1 — n)eh(n)h(n)
(其中,n 為[0,1]之間的常數,表示 g(n)與 h(n)對 f(n)的影響程度;eh(n)增強了啟發函數對估價函數的影響程度。)
蟻群算法的提出來源于螞蟻們在覓食的過程中選擇路徑的一種天生行為,這種行為會為整個蟻群帶來好處,節省覓食的時間并提高覓食的效率,從而提升整個蟻群的生存能力,適應物競天擇,適者生存的自然法則。螞蟻找到食物所在的最優路線所依賴的重要因素是信息素和環境,從螞蟻窩到食物之間會有不同的螞蟻行走不同的路線,他們會在自己的路線上留下信息素,而路程最短的那條路因為螞蟻通過的次數最多、數量也會最多,所以留下的信息素也會更濃郁,之后出去覓食的螞蟻都會循著這條路去覓食。這就是蟻群算法的基本思想。蟻群算法就是模擬螞蟻覓食中尋找到最短路徑的過程,蟻群算法能夠從原點開始到目標點結束,經過各種條件的約束最終得到返回原點所得到的最短路徑。
蟻群算法的機制是類似與形成一種正反饋的機制,采用這種正反饋機制,使得探索過程所搜索的結果不斷地收斂縮小,然后最終得到一個最優的解,即最優的路徑。蟻群算法在求解的性能上更厲害,在異常的情況下和危險的情況下具有更強得生存能力。本設計中選用蟻群算法具有在復雜多變的周圍情況下通過計算得到最優路徑的能力,并且蟻群算法的包容性和可塑性也較強,對傳統的蟻群算法進行基本的修改后加以運用到本設計中,來解決應用的特定問題。本設計通過將蟻群算法和模糊算法相結合,增強了仿生殺蟲機器人尋找最優路徑的能力。
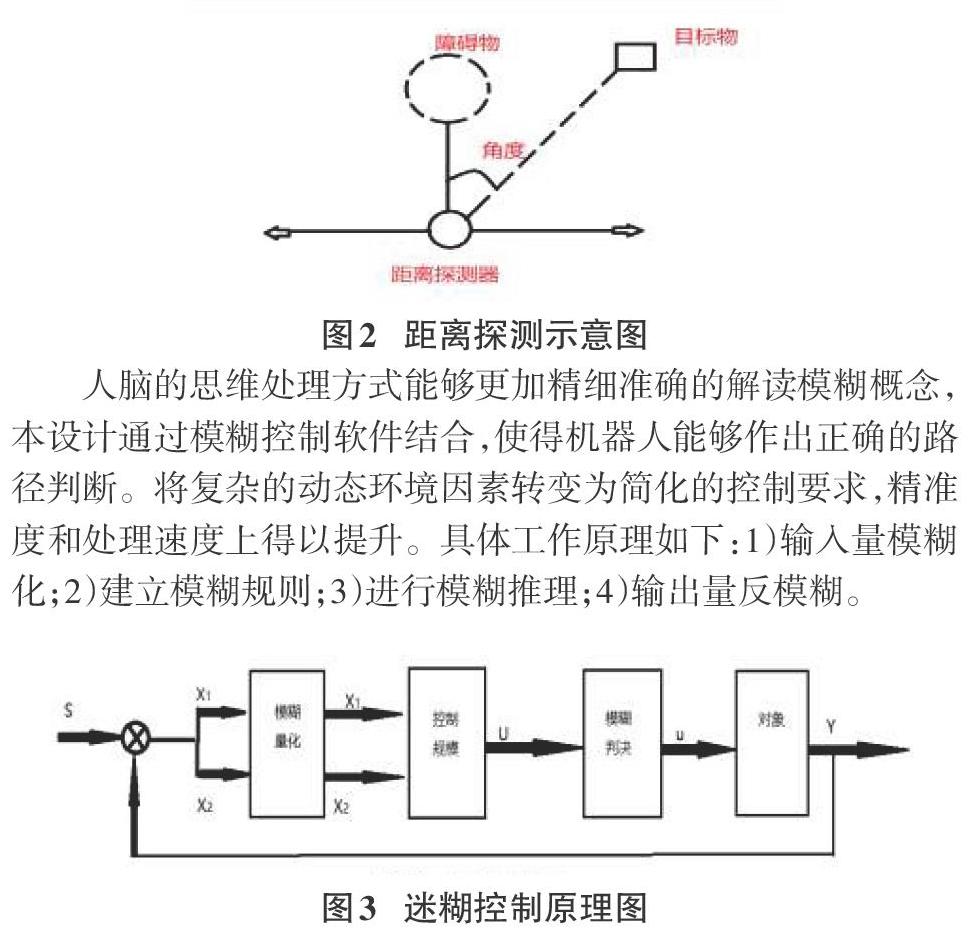
本設計的仿生機器人在運行過程中由于位置控制受外界條件的影響較多。為了更好地實現機器人避障行走,采用超聲波傳感與模糊控制相結合對外界環境進行感知,并探測得到障礙物的方位。超聲波距離傳感器采用周期掃描的方式進行遠距離檢測,將機器人觀察的范圍分為不同的部分,記錄下每個不同部分視角中探尋到的障礙物的遠近,通過測量計算得到詳細的外界環境[6]。超聲波距離傳感器探測示意圖如圖2所示。
人腦的思維處理方式能夠更加精細準確的解讀模糊概念,本設計通過模糊控制軟件結合,使得機器人能夠作出正確的路徑判斷。將復雜的動態環境因素轉變為簡化的控制要求,精準度和處理速度上得以提升。具體工作原理如下:1)輸入量模糊化;2)建立模糊規則;3)進行模糊推理;4)輸出量反模糊。
其中s:系統的設定值。
x1、x2:模糊控制具體的值。X1、X2:經過模糊量化后的值。
U:在模糊控制規則下處理過后通過理性推測后得到模糊控制量。
u:在模糊判決過后得到的控制量(精確量)。y:對象的輸出。
模糊控制器的輸入是超聲波采集的距離信號和機器人與目的地方向的夾角信息,輸出是殺蟲機器人的轉動角度。機器人在前進的時候,需要探測與障礙物的距離遠近和與目的地的角度來計算和規劃,最終得到需要轉動的角度,來得到最優的前進路線。當檢測到目標地點前有阻礙物時,機器人會調整適當的方向,改變之前規劃的路線來達到有效的躲避障礙物的目的[6]。
3.2 高清攝像頭
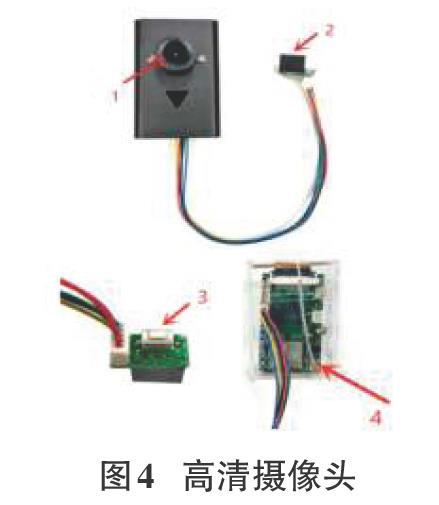
本設計使用的高清攝像頭模塊是一款無線Wi-Fi協議的超低功耗720P視頻分辨率的智能視頻模塊,本模塊物品具有的優點是產品的尺寸較小,容易組裝,使用簡便。該模塊還具有強大的Wi-Fi功能,支持遠程網絡的連接,以及具有照相和錄像的功能。攝像頭模塊集成了對視頻圖像的采集,編碼壓縮,傳輸等功能。攝像頭模塊采用高效的硬編碼方式,強大的Wi-Fi通訊模組,保證了拍攝視頻的清晰度和流暢度。圖4中1為主攝像頭;2為串行接口;3為復位按鈕;4為Wi-Fi天線。
3.3 噴灑捕殺
機器人在捕殺害蟲時,需要近距離的噴灑殺蟲劑,而害蟲的藏身之地大多比較隱蔽、狹小,機器人的全局不能夠靈活行動,需要一個靈活度較高的機械臂來輔助機器人完成殺蟲工作,本設計通過對機器人配合折彎機進行折彎作業進行調研和分析,確定用六自由度直角坐標折彎機器人的相關參數來設計機械臂[7]。根據本機器人工作的實際需要,本設計采用六自由度機械臂,它的機械臂由腰關節、肩關節、肘關節和腕關節組成,采取減輕自身質量均取材碳纖維的設計,機械臂的抓捕進程控制是經過頂部攝像機定位害蟲的三維中心坐標并轉化到機械臂坐標系,控制著機械手臂各關節的運動,將末端執行器送至距離害蟲3-4厘米的位置,實施捕捉行動。具體設計如下圖5所示,實體圖如圖6所示。
3.4可變形履帶運動
履帶是履帶機器人中的重要部件之一。它的功能是保證機器人在無路地面上的通過性,從而降低車輛的行駛阻力。而履帶機器人的穩固性可以通過履帶張緊力來進行評估,它對于履帶行駛系統的性能有非常大的影響。本文設計采用履帶式運動的方式,該履帶具有可變形,360度轉向等特點。在工作的時候,路形可能有些崎嶇,對行走能力要求嚴格。可變形式履帶可以解決這個問題,履帶會隨著地形的變化而變形。360度轉向特點,可以達到萬向快捷噴灑藥劑的要求,減少行走路程。機器人整體的靈活性,地形適應性強,轉向半徑小等優點也得以凸顯出來[8]。
3.5 手柄控制
人機交互界面在控制系統中十分重要,可以在必要的時候發揮著出乎意料的作用。機器人在經過復雜路面時經常會出現側翻或者被卡住的現象,甚至其他意想不到的突發情況,這單靠機器人本身的智能探測和路徑規劃的模塊是無法做到處理這些突發狀況的,此時可以借助手柄來控制機器人,用人們的經驗和更加強大而又細致的操作來處理突發狀況。手柄的操作方便直觀,本設計中選用常見的PS游戲手柄作為操作的設備,PS手柄與單片機通信時只需要4根信號線,占用的I/O口比較少并且通訊協議比較簡單,非常適合在機器人控制中使用。具體按鍵說明如表1所示。
4 結論
隨著社會發展,機器人已經和人們生活息息相關,本文通過借鑒類似應用在農業的六自由度機械臂,以及人工智能等技術來設計仿生殺蟲機器人。本文設計的迷你仿生殺蟲機器人根據仿生學原理,結合模糊算法和蟻群算法,實現了準確的害蟲捕殺,提高了捕捉害蟲的效率、自主性以及機器人行動的穩定性,但是在藥劑使用方面還存在著一定的缺陷,對于某些害蟲存在抗藥性,藥劑的作用范圍會因此受限制,并且對行動非常敏捷或者飛行快速的害蟲的捕殺和處理上具有一定的局限性。在今后的研究中將會找到一種更科學的方法來改善文中依靠藥劑捕殺的偶爾性和單一性。
參考文獻:
[1] 王紅民,張元,廉飛宇,等.紅外線技術在糧倉害蟲檢測中的研究與應用[J].河南工業大學學報(自然科學版),2010,31(3):80-81,85.
[2] 邵堃.五自由度機械臂的番茄智能采摘機器人[J].江蘇農業科學,2018,46(21):250-253.
[3] 家用機器人市場前景廣闊 巨頭們紛紛搶灘布局[J].商業觀察,2018(8):40-41.
[4] 周敬東,鄭小玄.基于改進蟻群算法的路徑規劃方法[J].湖北工業大學學報,2018,33(5):49-52,101.
[5] 馬金科,王直.基于改進蟻群算法的盤點型機器人路徑規劃[J].計算機技術與發展,2019,29(7):84-87.
[6] 趙宏才,郭佳樂,徐肖鯨,等.基于模糊蟻群算法的移動機器人軌跡規劃研究[J].計算機仿真,2018,35(5):318-321.
[7] 楊中.面向折彎作業的五自由度機械臂設計及運動控制研究[D].南京:南京郵電大學,2018.
[8] 王亞翔,張俊俊.基于正交實驗的履帶機器人張緊力優化[J].西南科技大學學報,2018,33(4):98-102.
【通聯編輯:唐一東】
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
