基于穩態視覺誘發電位的腦電控制上肢康復機器人
2021-07-19 09:58:34胡瑢華邵杭峰郭福民
科學技術與工程 2021年17期
熊 特,胡瑢華,邵杭峰,宋 巖,郭福民
(南昌大學機電工程學院,南昌 330031)
腦機接口(brain-computer interface, BCI)可以看成一種大腦與外部設備之間的協作,它使得神經元中發出的電信號可以直接傳送給外部設備,例如計算機或機械臂[1-2]。現如今腦卒中導致的肢體偏癱問題愈來愈嚴重,而偏癱患者的肢體恢復往往需要數位專業的康復理療師來輔助患者進行康復訓練,康復理療師的人員缺口巨大。因此通過腦機接口技術來控制康復機器人具有重大的研究價值,它不僅允許患者可以獨立自主地進行康復訓練,還能夠在一定程度上提高患者康復治療地積極性[3]。
李方博等[4]提出了一種雙腦協作腦機接口的設計方案,可用于協同控制多維度目標、提高BCI系統信息傳輸速率,為腦機接口發展提供了新思路。唐智川等[5]提出一種基于單次運動想象的腦電信號分類方法,在實時控制中達到了87.12%±2.03%的成功率。Chen等[6]提出一種基于穩態視覺誘發電位(steady-state visual evoked potential,SSVEP)的7自由度機械臂BCI控制系統,允許用戶直接控制機器人手臂,平均精度為92.78%。華南理工大學腦機接口與腦信息處理中心研制的腦機混合接口:在輪椅機械臂系統控制中的應用,得到了良好的控制精度,展現出了BCI控制系統應用于復雜日常任務的潛力[7]。李明愛[8]團隊研制了采用運動想象控制的上肢運動康復系統,完成手臂伸/屈動作,該系統的平均識別率為76.75%,固定時間窗為3~5 s。翟文文[9]提出一種基于SSVEP與Alpha波混合的BCI上肢康復訓練機器人系統,具有較高的分類準確率和實時控制效果。天津理工大學復雜系統控制與應用重點實驗室設計了一種基于腦電控制的移動爬墻清潔機器人智能遙操作系統[10],具有良好的工作效率、安全性以及魯棒性。
盡管隨著基于腦機接口的康復機器人研究不斷發展,涌現出了愈來愈多的研究成果,但也同樣還面臨著許多挑戰,如多目標分類的分析時間長、識別準確率仍有待提高。
基于此,現設計一種基于SSVEP控制的上肢康復機器人,目的在于輔助上肢偏癱患者獨立自主進行康復訓練運動,并且在實時控制康復運動開始和停止時,僅依靠患者的視覺注意即可完成康復訓練過程中所有動作。
1 研究方案
1.1 實驗設備
完整實驗流程如圖1所示,主要設備組成包括:奧地利G.Tec公司生產的80通道系統主機放大器、G.Recorder生物信號記錄軟件,G.SCARABEO 64通道電極帽,導聯位置符合10-20國際標準導聯系統,顯示視覺刺激界面的計算機,進行信號存儲和處理的計算機,藍牙通信模塊和四自由度上肢康復機器人。
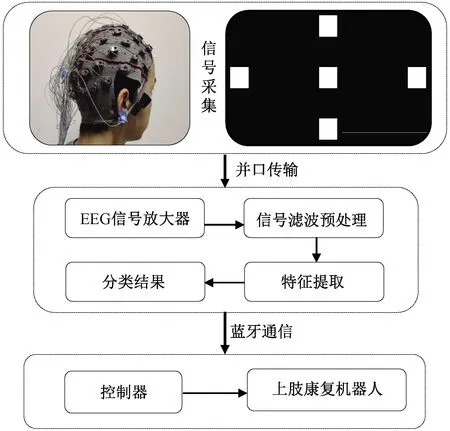
圖1 基于SSVEP的上肢康復機器人控制流程
上肢康復機器人實物圖如圖2所示。上肢康復機器人主體部分選用材料為合成塑料聚甲醛樹脂(polyoxymethylene,POM)和聚乳酸(polylactice acid,PLA),選用合成塑料既保證了機構強度和硬度,也減輕機構的質量。主體部分通過背部支架安裝在一個可移動輪椅上,通過輪椅來實現機器人的移動。上肢康復機器人由伺服電機驅動關節運動,輔助患者完成康復訓練動作,設計的康復訓練動作為肩關節外展內收、肩關節屈伸、肘關節屈伸和腕關節屈伸4個自由度和1個停止,每個自由度的動作都是周期性重復。另外,考慮到不同患者的上身身高可不同,因此在輪椅的背部支架上還留有不同高度的小孔,用于調整機器人的高度。

圖2 四自由度上肢康復機器人
1.2 視覺刺激器設計
基于視覺刺激的SSVEP腦電信號主要特征為當眼睛注視到4~60 Hz的視覺刺激時,在大腦的枕葉區會產生與所注視的刺激相同頻率或倍頻的腦電信號,該響應信號可以在大腦皮層被檢測出。為了保證連續穩定的SSVEP信號出現,現階段主要有3種主流的刺激顯示裝置,分別為發光二極管(LED)、陰極射線管(CRT)、液晶顯示器(LCD)。
設計的刺激分類為5種,其中4種對應4個康復訓練動作,第五種對應停止動作命令。選擇了分辨率為1 920×1 080的LCD液晶顯示屏作為視覺刺激器。屏幕刷新頻率為60 Hz,為保證刺激頻率的準確性以及避免SSVEP信號倍頻成分之間的干擾[11],設計的5個刺激頻率為6.67、8.57、10、12、15 Hz,刺激頻率均為60 Hz的整數分之一,分別對應5個控制指令。刺激界面由Pscyhtoolbox-3心理物理學工具箱在MATLAB軟件上編寫完成,該工具箱可以精確控制視覺刺激頻率,設計的刺激界面如圖3所示。刺激顯示器長46 cm、寬26 cm,正方形刺激塊邊長4 cm,中間刺激矩形居中布置,與左右刺激矩形間隔16 cm、與上下間隔6 cm,四周刺激矩形與顯示器邊緣間隔1 cm。
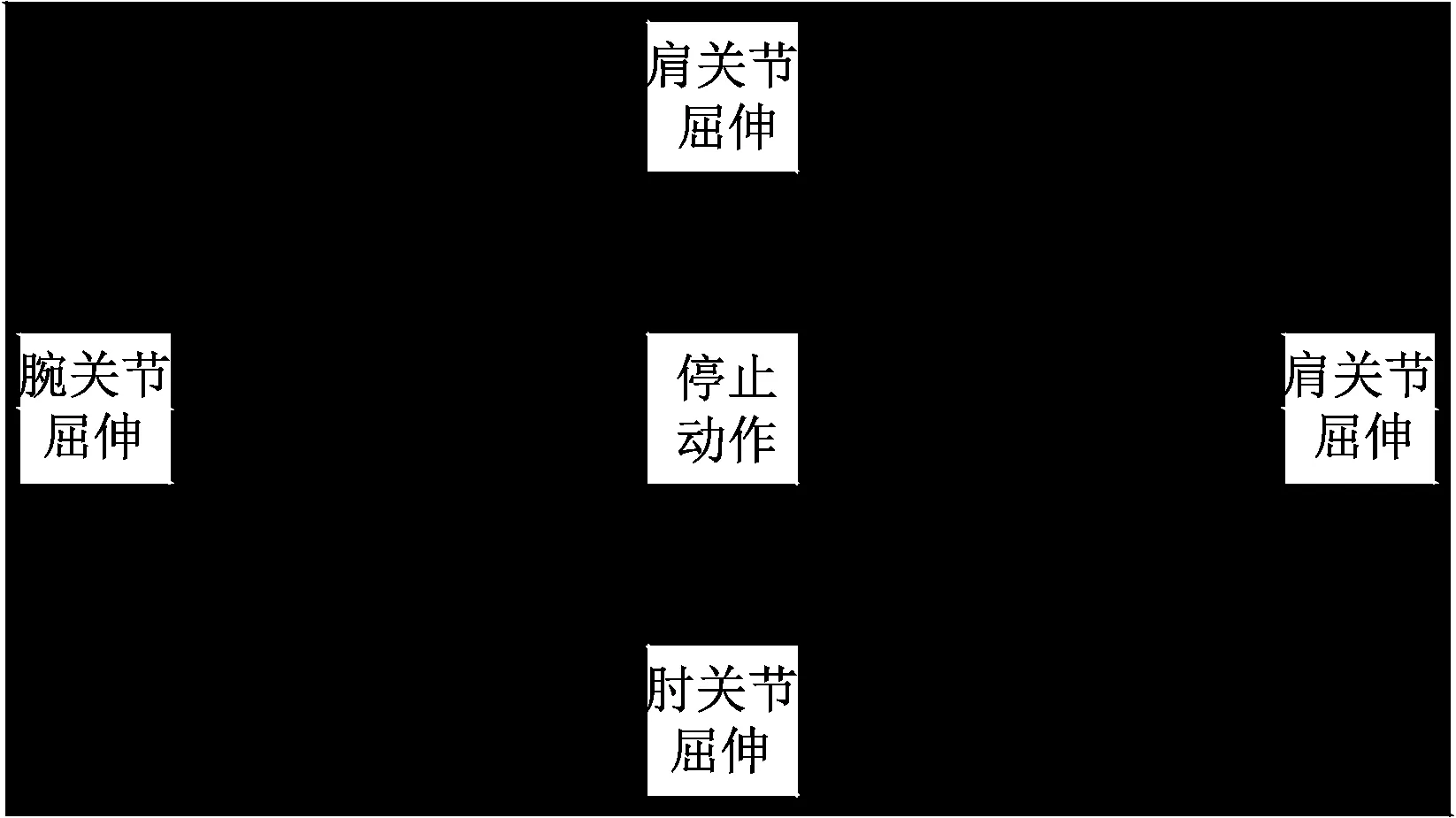
圖3 視覺刺激器
2 信號采集與處理
2.1 信號采集
實驗選擇了5名年齡在22~24歲、均無SSVEP經驗的男性為受試者,在除相關實驗設備外沒有其他大型用電設備的房間中進行。基于1.2節設計的視覺刺激器下采集SSVEP腦電信號。受試端坐于舒適的凳子上正視前方,眼睛與LCD顯示屏水平距離保持為60 cm。
閃爍刺激的一個完整的周期時長為5 s,如圖4所示。閃爍過程中目標刺激塊首先閃爍4 s,后暫停在如圖3界面1 s。實驗過程每一組實驗中要求受試者從最上方6.67 Hz開始依次順時針分別注視每個刺激塊10次,每次注視4 s休息1 s,并告知受試者在閃爍刺激時盡量避免眨眼、眼動或是身動等其他行為。每個受試者進行兩組實驗,兩組實驗之間休息5 min。
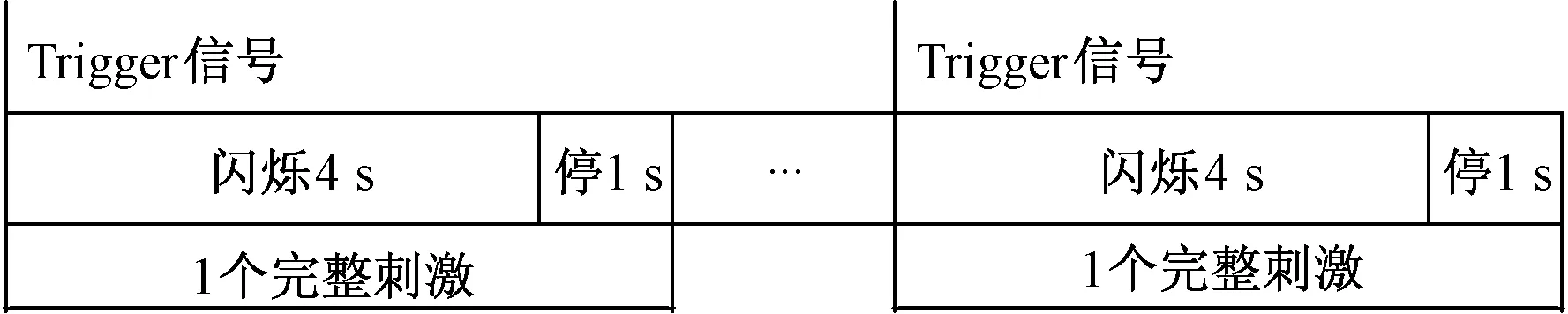
圖4 實驗范式循環流程
實驗過程中選擇采集P3、Pz、P4、PO3、POz、PO4、PO7、O1、Oz、O2、PO8共11個導聯通道的腦電信號,并以63通道作為參考信號放置于左/右耳垂處,采樣頻率為256 Hz,腦電信號采集的某時刻場景如圖5所示。實驗過程中保證各通道與頭皮之間的阻抗在3 kΩ及以下,并通過設置Combine Trigger聯合觸發器定義好并口傳輸協議,接收實驗過程中生成刺激電腦端口發出的Trigger標志位信號,保證腦電信號產生與頻閃刺激開始的精確同步。
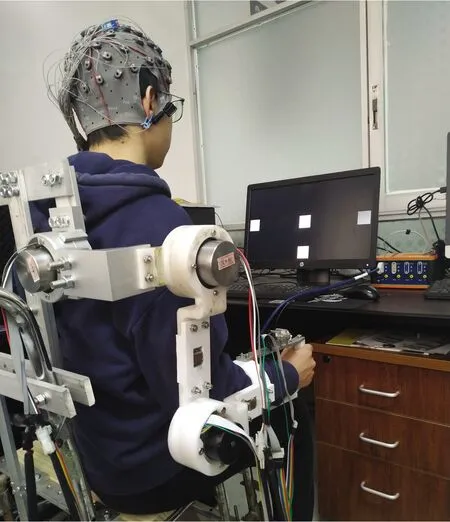
圖5 在線控制機器人動作
2.2 信號處理
基于SSVEP穩態視覺誘發電位的腦電信號處理常用的算法有快速傅里葉變換(FFT)、典型性相關分析(CCA)、多導聯同步指數(MSI)、最小能量結合(MEC)[12-14]。Zhang等在研究中發現,在短時窗樣本數據長度較小的情況下,MSI算法相比與CCA、MEC等算法能夠得到更高的分類準確率[13]。選擇MSI算法作為頻率識別的分類算法,SSVEP信號處理流程圖如圖6所示。
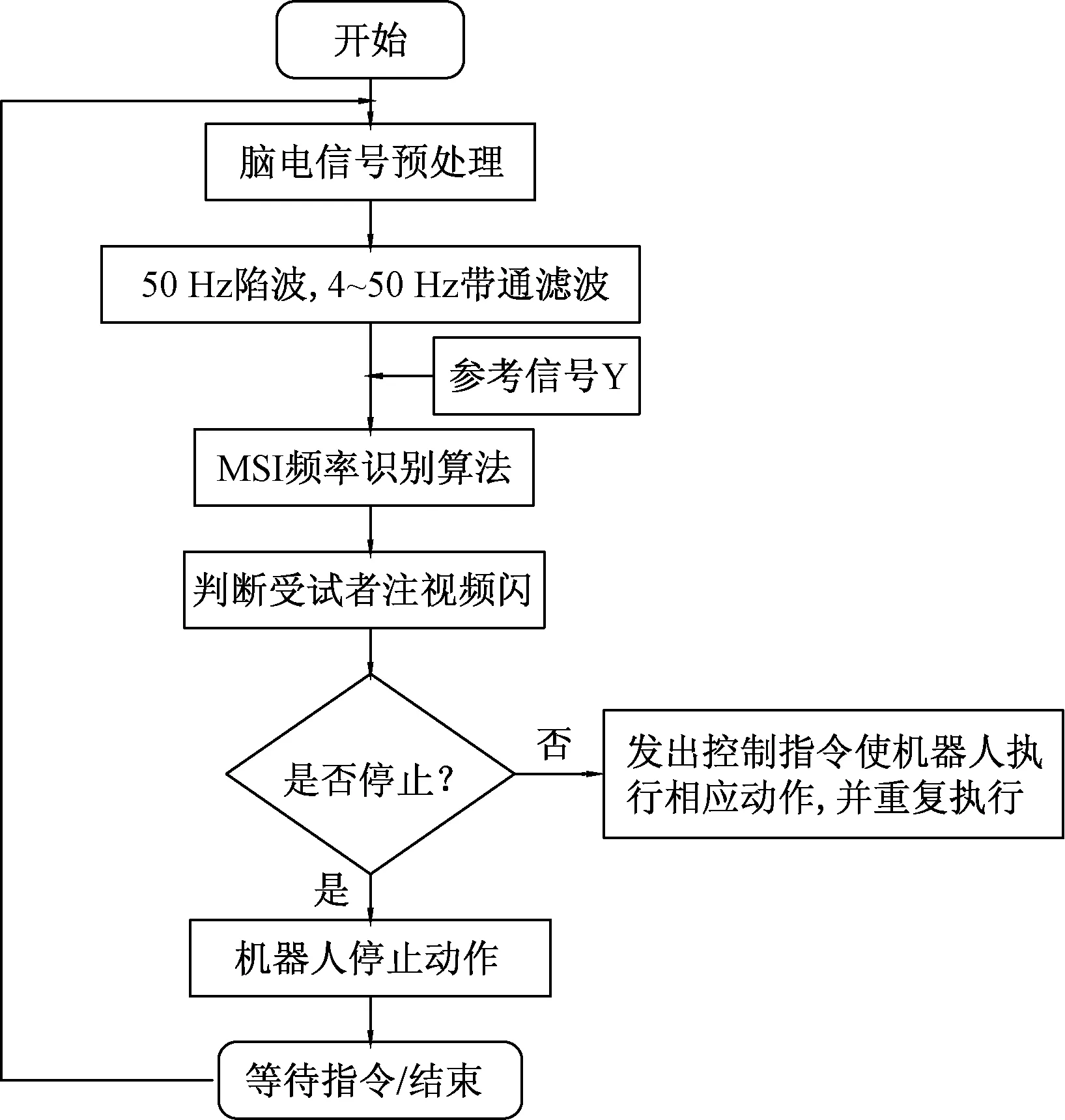
圖6 SSVEP信號處理流程
2.2.1 信號預處理
對采集到的信號進行預處理,分別設計了50 Hz去工頻陷波濾波器以及4~50 Hz的切比雪夫帶通濾波器,使用MATLAB軟件完成信號的濾波處理去除工頻、高頻干擾等噪聲。
2.2.2 基于MSI的頻率識別算法
MSI算法的主要目的是通過運用S-估計算法,來得出多個通道腦電EEG信號和參考信號之間的同步指數,算法的頻率識別過程如下。
腦電信號是一個大小為N×M的矩陣X,構造的參考信號是一組大小為2Nh×M的矩陣Y。N為腦電信號的導聯通道數,M為信號樣本數即樣本長度,Nh為構造的參考信號里包含的正余弦成分的諧波數。計算X與Y之間的相關矩陣為
(1)
(2)
(3)
(4)
(5)
有研究學者發現,C中存在的自相關矩陣會對X與Y之間的同步指數計算結果造成影響,因此進一步對C進行如下公式變換以去除該影響因素。
(6)
經過上述系列變換后的相關矩陣R為
R=UCUT=
(7)
式(7)中:IN×N為維度為N的單位矩陣;I2Nh×2Nh為維度為2Nh的單位矩陣。設Φ1,Φ2,…,Φi為R的特征值,標準化處理為
(8)
式(8)中:P=N+ 2Nh,tr(R)為矩陣R的跡。
信號X與參考信號Y之間的同步指數計算公式為
(9)
基于MSI的多導聯頻率識別算法在運算過程中,需要依據所設計的視覺刺激頻率構造出相應的參考信號Y,假設有k個刺激頻率,則構造的參考信號數學表達式[14]為
(10)
式(10)中:Nh、fk、FS分別為諧波數、刺激頻率和采樣頻率。
構造參考信號Y之后,利用式(1)和式(9)即可計算得到每一個EEG腦電信號與所有參考信號之間的同步指數S1,S2,…,SK。其中最大同步指數Smax所表示的參考信號的頻率即為MSI算法識別出來的受試注視的閃爍頻率。
3 實驗與結果分析
3.1 實驗流程
對上肢康復機器人進行訓練動作調試,通過上位機向機器人發出不同的控制指令,確保機器人能夠在接收指令后正確完成相應的康復訓練動作。
首先對采集到的SSVEP腦電信號做分類識別處理,并轉換成各頻閃相對應的控制指令,然后通過藍牙通信將指令發送至上肢康復機器人的控制器,進而控制機器人完成相應的康復訓練動作。記錄每一次的頻閃分類識別結果以及預期的康復訓練動作與實際動作是否一致。
3.2 結果分析
信號分析的過程中為了保證所取SSVEP信號的穩定性,選擇從刺激開始后0.2 s作為時間窗的起始取值。首先對5名受試者兩組block共120次刺激,0.5~2.5 s每隔0.5 s取一次時間窗長度進行分類識別,所得結果如圖7所示。
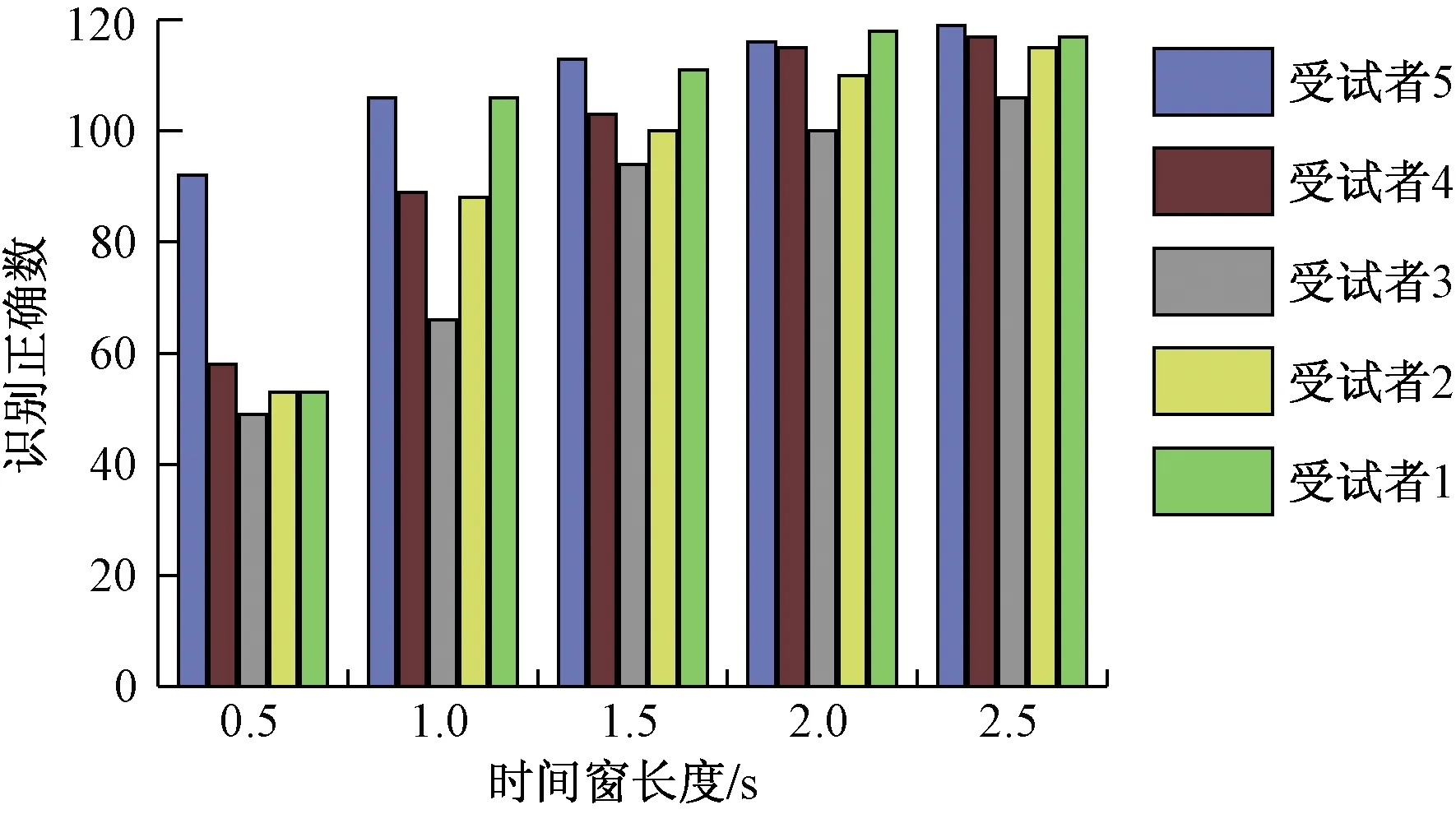
圖7 5名受試者的實驗結果
根據識別正確數隨時間窗長度增加的變化趨勢可得,時間窗大于等于2 s后,5名受試者的識別正確數變化均趨于平穩。其中受試者3未按要求集中精神情況,但結果也表現尚可。因此實驗控制過程中,以2 s時間窗長度的信號作為分類樣本,機器人實際與預期動作完成情況如表1所示。
信息傳輸速率(ITR)常常用于作為評估腦機接口系統的傳輸性能指標,計算公式[15]為
(11)
式(11)中:T為采樣開始至機器人執行完一次動作的總耗時;Q為刺激目標個數;P為識別正確率;ITR單位為bits/min。實驗的平均ITR和平均耗時結果如表2所示。
由表1、表2可知,5名受試者的平均正確率為93.17%,信息傳輸速率為23.11 bit/min,平均耗時為4.74 s。受試者5表現最好,在2 s的時間窗長度控制正確率達到98.33%;實驗結果驗證了基于SSVEP信號控制的上肢康復機器人的可行性和有效性。
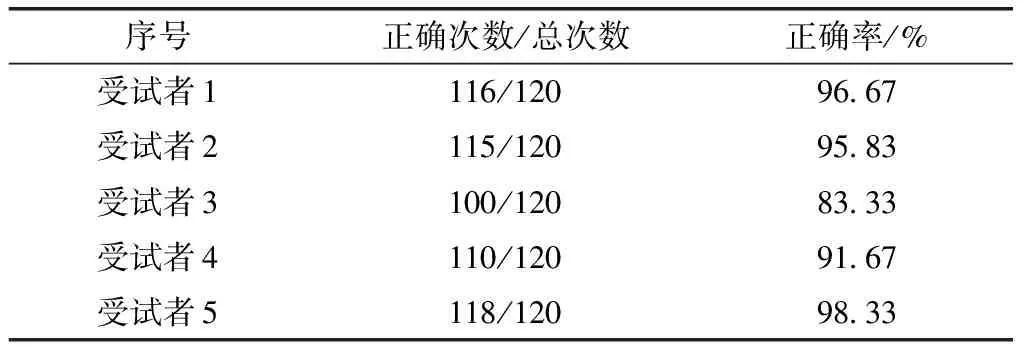
表1 機器人動作正確率
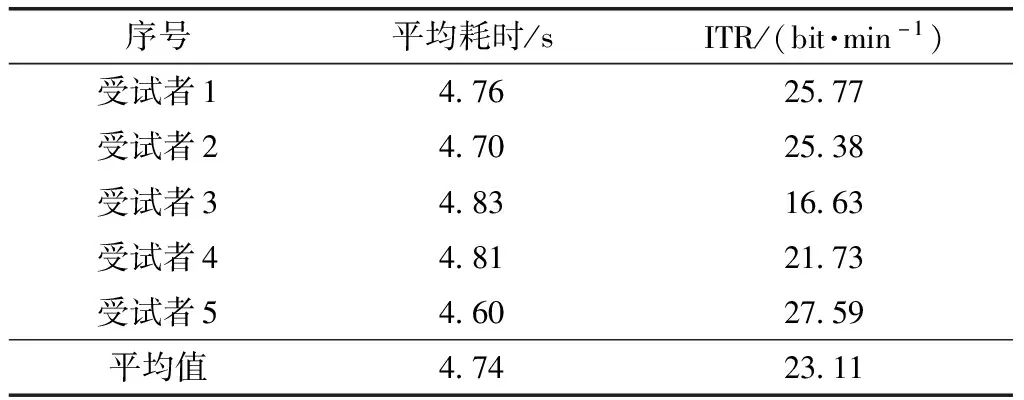
表2 平均耗時與ITR結果
4 結論
基于SSVEP腦電信號控制的上肢康復機器人,允許患者獨立自主地進行康復訓練運動,2 s時間窗長度下的分類識別情況下,控制動作正確率高達98.33%,達到了預期的研究目標,在控制上肢康復機器人輔助治療的方面具有良好的應用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
特別健康(2018年2期)2018-06-29 06:13:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國衛生(2014年6期)2014-11-10 02:30:50
