偏振光輔助航向角在慣性導航中的應用研究?
2021-07-16 14:05:40楊江濤王健安
電子器件 2021年3期
楊江濤,王健安,王 銀,胡 嘯
(太原科技大學電子信息工程學院,山西 太原 030024)
導航在人類的生存和發(fā)展中扮演著越來越重要的角色,從最初的軍事領(lǐng)域逐漸影響到了人們各式各樣的生活。尤其高速發(fā)展的現(xiàn)代社會,越來越多如蛇形般蜿蜒曲折、錯綜復雜的高速公路出現(xiàn)在人們的生活中,如果失去導航就好像無頭蒼蠅一樣在復雜的公路上橫沖直撞找不到自己所需的出口。因此,人們對導航的研究從未止步,并在不斷改進不斷加強。導航大致分為自主式導航和無線電導航兩種,自主導航中當屬慣性導航和衛(wèi)星導航為主。但它們均存在一定的不足,對衛(wèi)星導航來說,當衛(wèi)星發(fā)生故障或接收天線被遮擋時信號會發(fā)生中斷,容易受到干擾和破壞,甚至存在信號被截斷破解被敵方利用的風險;慣性導航由于不向外輻射能量,有自主性好且不受外界電磁干擾的優(yōu)點,但其導航誤差隨時間累積,且通常慣導設備價格昂貴。導航技術(shù)的快速發(fā)展使得上述兩種導航被應用于更多的領(lǐng)域,這就對導航信息源提出了更高的要求。因此,探索出新的信息源并將其用于導航領(lǐng)域成為越來越迫切的研究目標。
近二十年來,基于大氣偏振模式的偏振光導航逐漸成為了導航界的研究熱點[1]。當太陽光通過照射進入到大氣層后,會受到大氣層中粒子的散射作用及地面的反射作用產(chǎn)生偏振,這就在整個空中形成了大氣偏振模式,其屬于一種自然屬性,一直處于穩(wěn)定分布狀態(tài)[2]。通過研究表明,許許多多的膜翅目昆蟲長期以大氣偏振模式提供的穩(wěn)定導航為參考進行覓食[3]。比如,沙漠中的一種螞蟻就長期利用大氣偏振模式提供的信息進行覓食[4]。蜜蜂每日也利用大氣偏振模式提供的信息進行采蜜[5]。經(jīng)過各國研究者對生物的這種行為進行長期的研究和分析后逐漸掌握了昆蟲利用大氣偏振模式進行導航的機理[6]。在此基礎上,研制出人工的偏振傳感器和導航方法并將之應用到機器人航向角的確定中[7-9],實現(xiàn)對機器人的精準導航[10]。因為大氣偏振模式是天空中存在的自然屬性,很難遭到人為的破壞和干擾,并且基于大氣偏振模式的偏振光導航屬于自主導航,誤差不會隨時間的增長而累積,因此受到了越來越多人的關(guān)注和追捧[11-13]。
本文針對慣導在進行長時間導航,尤其是搭載于微小型無人機在軍事戰(zhàn)場上進行長時間的偵察活動以及無人值守任務時的航向角誤差累積問題,提出了一種可輔助慣性導航系統(tǒng)的偏振光對載體航向角的檢測方法,通過搭建的三通道偏振成像系統(tǒng)對晴朗天氣下全天域的載體航向角進行了測量,可修正慣性導航進行長時間導航中的誤差積累和漂移的問題。經(jīng)過實驗驗證,利用以全天域大氣偏振模式作為信息來源解算的載體航向角可以較好地修正慣性導航的誤差累積,將來可用于偏振光/慣性組合系統(tǒng)對無人機的實時導航中。
1 大氣偏振模式特性分析
1.1 大氣偏振模式描述
瑞利散射模型與實際的大氣偏振模式相似度基本一致,因此到目前為止其依舊是我們對大氣偏振模式最常用的表征方法。瑞利散射通常用偏振角(AOP,又稱E 矢量方向)和偏振度(DOP)對大氣偏振模式進行描述[14],其分布如圖1 所示,其中O、Z、S分別代表地面觀測點、天頂點及太陽,太陽子午線和逆子午線分別用SM 和ASM 表示,分別用短線的位置和粗細表示一束散射光的振動方向和偏振度大小。
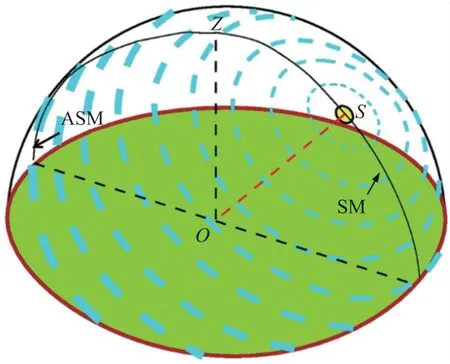
圖1 大氣偏振模式
由圖1 可看出,大氣偏振模式中的偏振度和偏振角分別關(guān)于由O、S及Z構(gòu)成的太陽子午面呈對稱和反對稱分布[15]。由于以太陽為中心的大氣偏振模式非常穩(wěn)定,所以只要能準確獲取太陽的空間位置即可為導航提供參考信息。
1.2 大氣偏振模式特征分析
建立一個如圖2 所示的大氣偏振模式模型,以圓的中心O為觀測者的觀測位置,X、Y、Z分別指向正北、正東及天頂。P點表示被觀測點,其高度角和方位角分別用h和α表示,取值范圍分別為-90°~90°和0°~360°。S代表太陽的位置,其高度角和方位角分別用hs和as表示,其方向描述與P點一致,都是以北向為起點,順時針方向為正,逆時針方向為負。通過式(1)和式(2)能計算出任意一個觀測點的偏振角及偏振度的值。
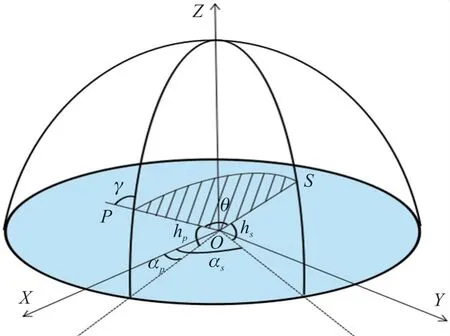
圖2 航向角測量瑞利模型的空間坐標系
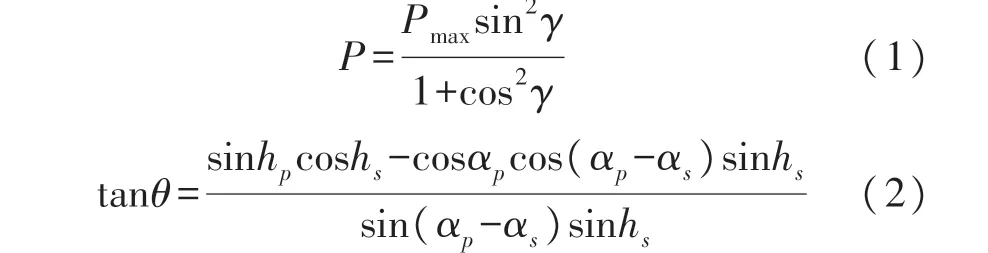
式中:Pmax表示大氣偏振模式中的最大偏振度(偏振度在理想情況下的值為1,通常晴朗天氣下的偏振度大約為0.7),θ是一個由太陽位置和觀測位置決定的參數(shù),一般為常數(shù)。
從上面的分析可得太陽子午線的特征如下:
(1)整個天球都分布著太陽子午線,即使天球的部分區(qū)域遭到多云的破壞,也可從其余部分獲取較為完整的方位信息,抗干擾能力很強。
(2)當α=αs時,通過式(2)可解得的太陽子午線上偏振角大小為90°,通過這個條件可輕松識別出太陽子午線。
(3)由太陽周圍具有最小的偏振度可知子午線的偏振度比逆子午線小,利用這一特征可消除導航中產(chǎn)生的角度歧義性。
由以上分析可得太陽子午線即可代表大氣偏振模式中包含的信息,只需獲取子午線即可為導航提供信息。
2 偏振光航向角解算
2.1 水平狀態(tài)下的航向角解算
由大氣偏振模式的分布原理可得:載體的航向一旦發(fā)生改變,其偏振模式就會跟隨太陽位置一起變化。因此載體的航向信息即可通過其坐標下太陽子午線方位信息求得。航向角獲取方法如圖3所示。
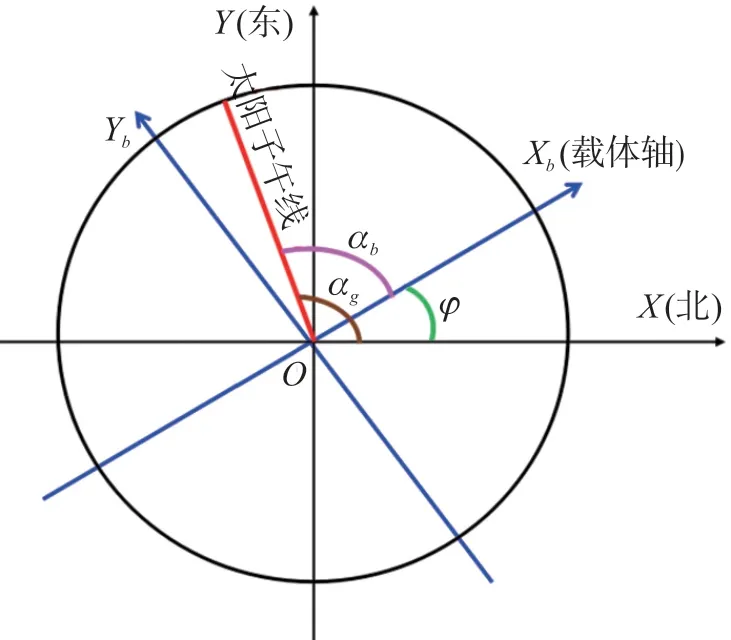
圖3 航向角獲取方法
圖3 中,將地理坐標系作為參考坐標系,以圓的中心O為觀測者的觀測位置和載體重心,X、Y、Z分別指向正北、正東及天頂。載體坐標系的體軸用Xb表示,體軸垂直方向用Yb表示。兩個坐標系下的太陽子午線的方位角分別由αb和αg表示,則載體相對正北方向的航向角為α=αg-αb,鑒于αb和αg的求解已在文獻[15]中進行了詳細的講述,這里不再贅述。
2.2 輔助融合算法的改進
在改進輔助融合算法中一般可以把相機拍攝的過程認為是一種透視投影的方式,投影的邊緣線會交叉匯聚在某個點上,因此拍攝的景物若是靠近圖像中心則尺度會放大,反之則會變小。對于拍攝的照片,因為拍攝對象與載體的距離是比拍攝對象中物體尺寸要大得多,所以對圖像進行預處理的過程中一般都認為整個照片中各個位置與載體的間距近似相等,在這個前提下,透視投影也可以看成平行投影,并且因此計算。
針對飛行器的拍攝角度產(chǎn)生的形變進行圖像修正。由于飛行器本身以一定姿態(tài)進行飛行活動,固定在飛行器的攝像頭也就與水平面構(gòu)成一定的角度,拍攝出來的圖像就相對地有形狀的變化。修正的關(guān)鍵就是消除飛行姿態(tài)所帶來的拍攝角度的影響,將拍攝的攝影平面坐標系轉(zhuǎn)換為實際圖像坐標系。
假設攝影平面坐標系為(x y z),實際平移坐標系為(x′y′z′),實際坐標系為(X Y Z),如圖4 所示,飛機器S在實際坐標系中的坐標為(XsYs Zs),平面A為攝影平面圖像,平面B為實際圖像平面。θ、γ、φ分別為飛行器的俯仰角、橫滾角和航向角。
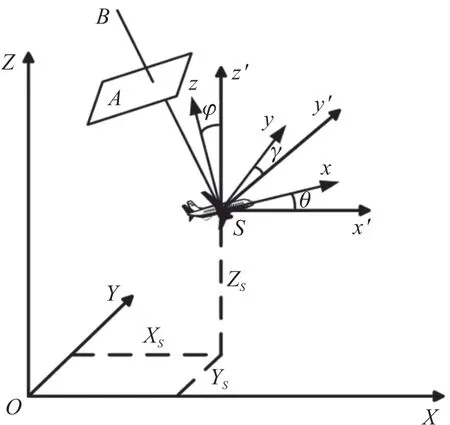
圖4 圖像矯正坐標變換示意圖
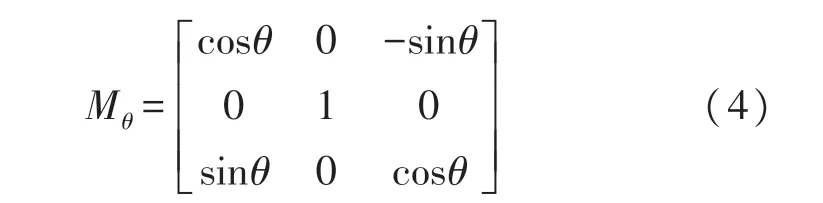
假設航向角φ、橫滾角γ均為0,即飛行器只與X軸成一定的俯仰角θ,即可得到投影平面坐標系和實際平移坐標系之間的變換矩陣:
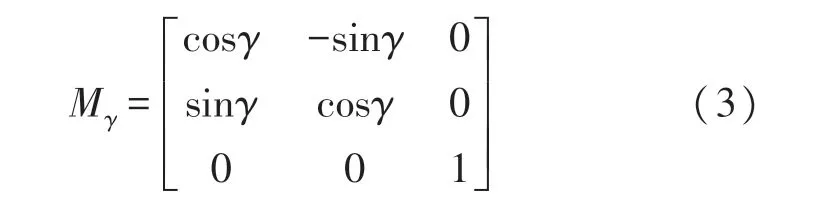
同理,在只有橫滾角γ發(fā)生變化,坐標系變換矩陣式(4):
當飛行器的飛行姿態(tài)角度為M=MθMγ[θ、γ]時,攝影平面坐標系與實際平移坐標系的變換矩陣。因此我們可以得到攝影平面坐標系[xyz]與實際平移坐標系[x′y′z′]之間的變換關(guān)系,如式(5):
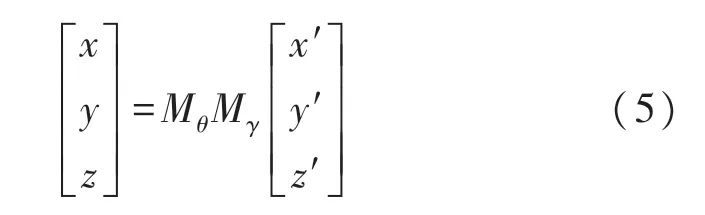
通過上述變換矩陣M將攝影平面坐標系轉(zhuǎn)換為實際平移坐標系,可以將以一定角度拍攝的圖像轉(zhuǎn)換為90 度垂直的圖像,旋轉(zhuǎn)效果如圖5 所示。
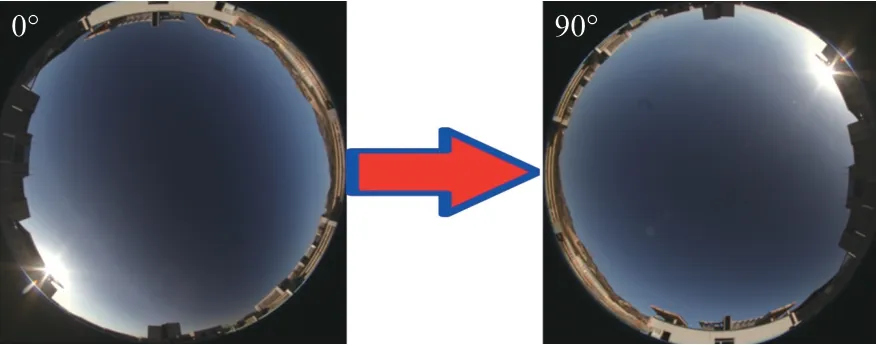
圖5 圖像轉(zhuǎn)換效果圖
3 實驗
利用搭載的大視場、小型化的三通道全天域偏振成像系統(tǒng)(如圖6 所示)進行靜止狀態(tài)下的航向角測量。三通道全天域偏振成像系統(tǒng)的標定使用激光中心標定法對系統(tǒng)每個鏡頭進行成像中心的標定。為了擺脫空氣中的微塵對實驗的影響,實驗測量的地點選擇為山西省太原市一處海拔較高的山上(106°26′34″E,36°0′54″N),時間為上午七點,實驗地點海拔較高,這天天氣非常晴朗、能見度非常高。實驗中用一個無錫慧聯(lián)信息科技有限公司生產(chǎn)的型號為HEC395 的9 軸姿態(tài)航向參考系統(tǒng)作為對比,其靜止狀態(tài)下的航向角測量精度為0.3°。將參考系統(tǒng)和偏振光羅盤水平放置于搭建的平臺上,將航向參考系統(tǒng)與偏振光羅盤的初始航向角都調(diào)為0°,航向參考系統(tǒng)進行六個半小時的持續(xù)測量,偏振光羅盤每隔半個小時進行一次數(shù)據(jù)采集。
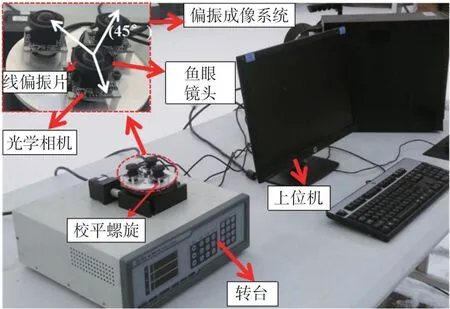
圖6 三通道偏振成像系統(tǒng)
航向參考系統(tǒng)的姿態(tài)測量數(shù)據(jù)如圖7 所示,從圖中可以看出,經(jīng)過六個半小時的測量,航向參考系統(tǒng)的誤差累積已經(jīng)達到了將近7°。
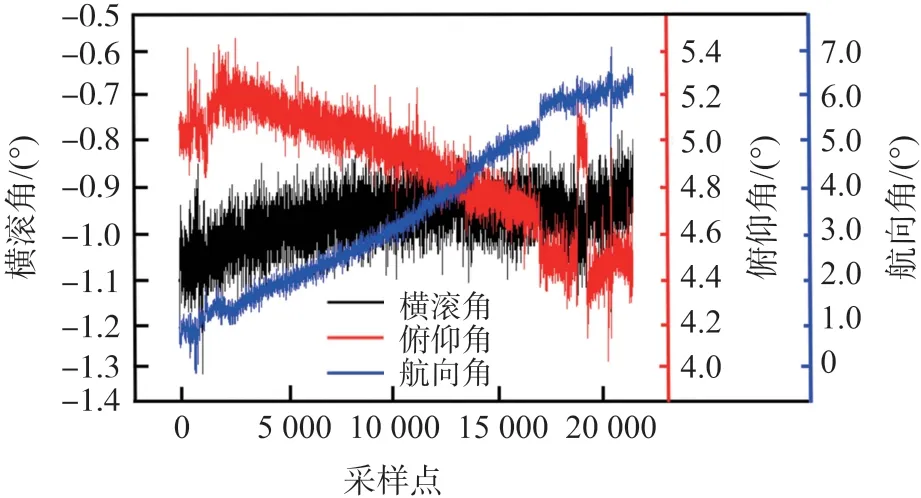
圖7 九軸姿態(tài)航向參考系統(tǒng)的實測數(shù)據(jù)
利用偏振成像系統(tǒng)測量的實驗數(shù)據(jù)如圖8 所示,其中A 列表示原始圖像,B 列表示通過解算獲得的AOP 分布圖,C 列表示通過解算獲得的DOP 分布圖。D 列為子午線特征點提取結(jié)果。航向角的測量實驗數(shù)據(jù)如表1 所示。從表1 可以看出,通過偏振光羅盤測量的航向角誤差不會隨著時間的增長而變大,其與航向參考系統(tǒng)測量的航向角對比如圖9所示。
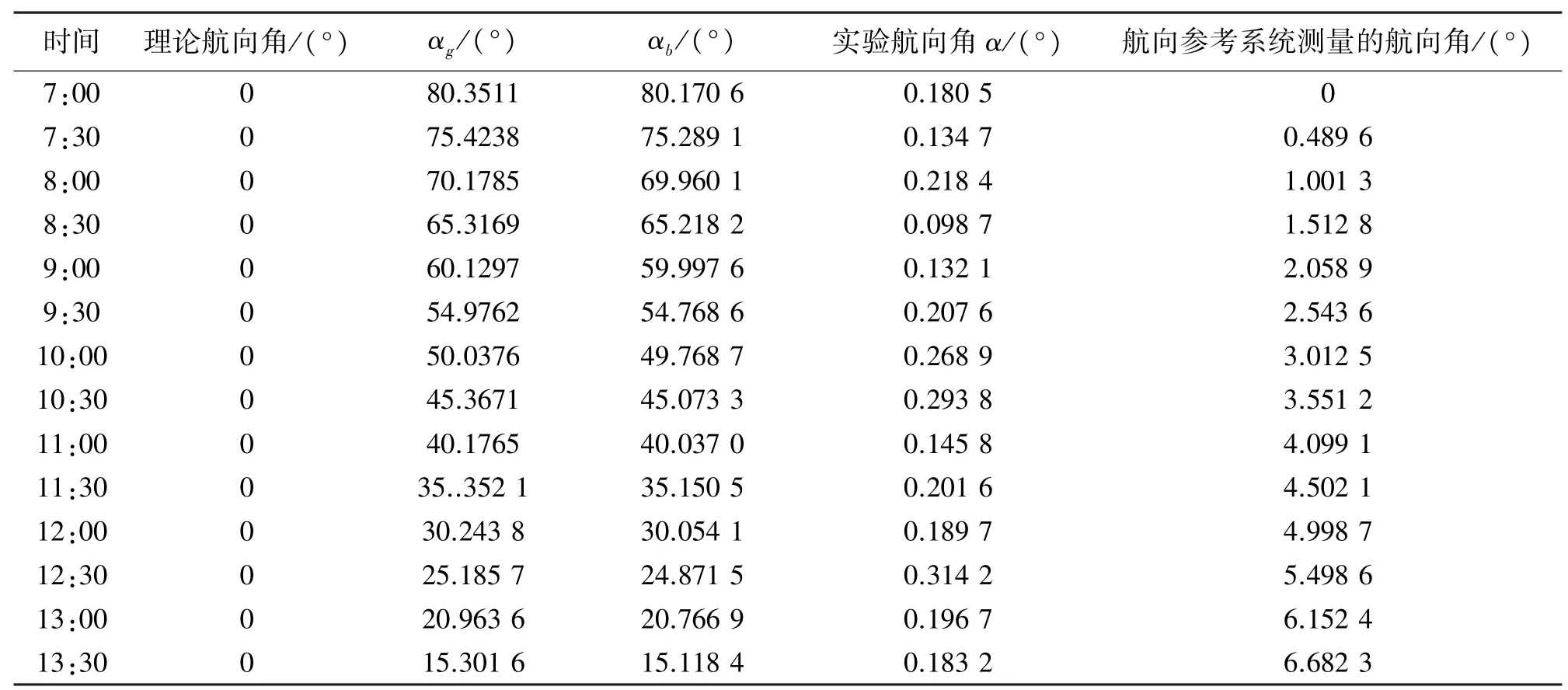
表1 外場實驗數(shù)據(jù)表
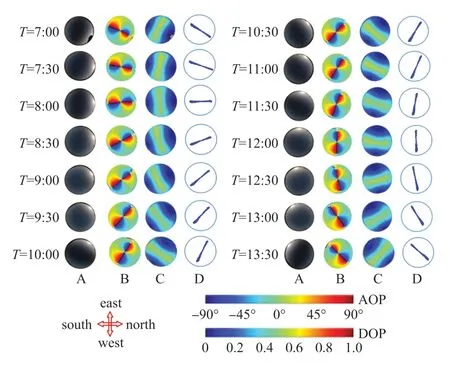
圖8 晴朗天氣下偏振光羅盤的測量結(jié)果
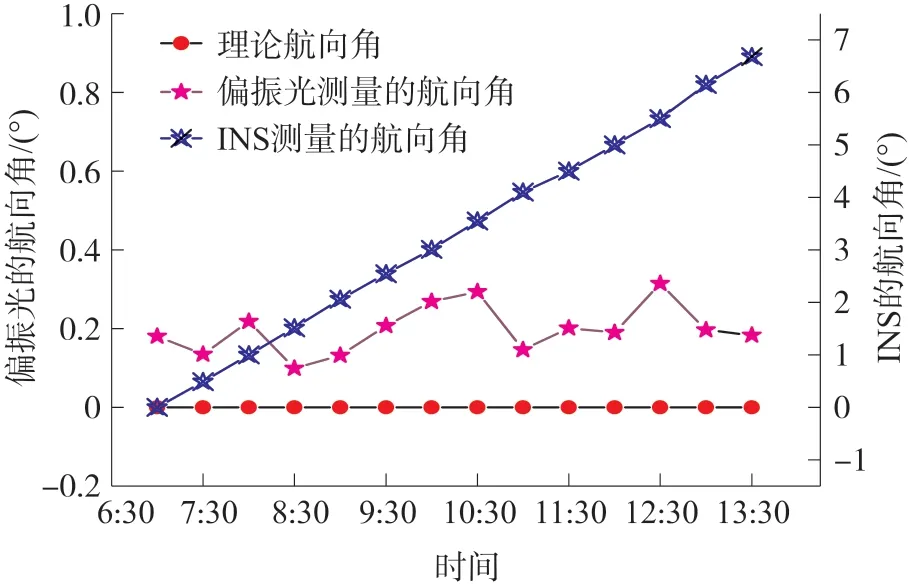
圖9 晴朗天氣下航向角解算實驗結(jié)果
從圖9 可以看出航向參考系統(tǒng)隨著時間的增長航向角的誤差累積越來越大,基本上隨著時間以1°每小時的速度呈線性增長,而全天域偏振成像系統(tǒng)隨著時間的增長誤差不會累積,最大誤差為0.314 2°,最小誤差為0.098 7°,而且偏振光抗干擾能力強,誤差也不會隨著時間的增加而累積。將來隨著研究水平的提高,利用偏振光導航將更加成熟,故將偏振光與慣性系統(tǒng)組合起來形成一個組合系統(tǒng),可以對慣性系統(tǒng)的誤差累積進行有效的校正,如圖10 所示。
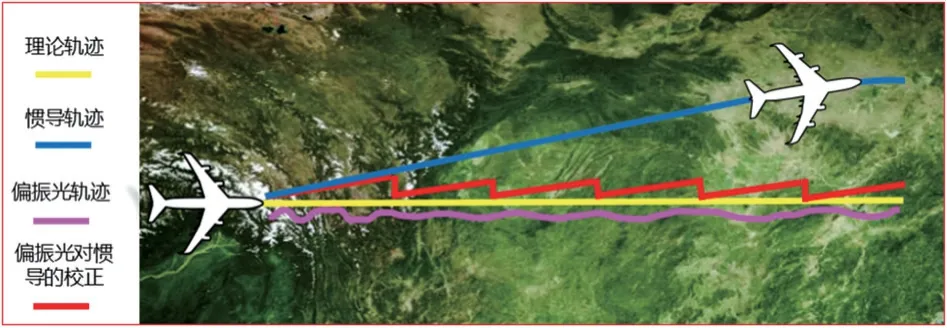
圖10 偏振光對慣導航向角誤差積累的校正
4 結(jié)論
本文針對慣性導航系統(tǒng)隨著時間增長的漂移問題,研究了一種偏振光輔助慣導的融合算法,并利用搭建的三通道偏振成像系統(tǒng)對晴朗天氣下的載體航向角進行了測量,通過長時間的實驗測試表明,三通道偏振成像系統(tǒng)解算的航向角最大誤差為0.314 2°,最小誤差為0.098 7°,而慣性導航系統(tǒng)卻以每小時1°的誤差持續(xù)增長,因此可將偏振光用于對慣性導航進行輔助,對慣性導航的誤差累積進行有效的校正,將來有望用于組合導航對慣導進行實時修正,具有重要的研究意義和軍事應用價值。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
工業(yè)設計(2022年8期)2022-09-09 07:43:20
空間科學學報(2021年4期)2021-08-30 08:31:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
