基于Ackermann轉(zhuǎn)向原理的循跡控制研究
2021-07-16 05:15:46陳永發(fā)池茂儒郭兆團(tuán)趙昀隴
機(jī)械 2021年6期
陳永發(fā),池茂儒,郭兆團(tuán),趙昀隴
基于Ackermann轉(zhuǎn)向原理的循跡控制研究
陳永發(fā),池茂儒,郭兆團(tuán),趙昀隴
(西南交通大學(xué) 牽引動(dòng)力國家重點(diǎn)實(shí)驗(yàn)室,四川 成都 610031)
為了對虛擬軌道車輛的控制方法進(jìn)行研究,本文針對三編組虛擬軌道列車,建立了車輛多體動(dòng)力學(xué)模型,并從車輛動(dòng)力學(xué)角度出發(fā)提出了基于Ackermann轉(zhuǎn)向原理的多編組列車循跡控制方法,結(jié)合模糊控制理論與PID控制理論利用Simulink構(gòu)建了車輛模糊循跡控制模型。通過聯(lián)合仿真證明基于Ackermann的單軸協(xié)調(diào)控制雖然從運(yùn)動(dòng)學(xué)角度上不能實(shí)現(xiàn)完美的各車輪“純滾”過彎,但可以對首尾車進(jìn)行較好的約束,從而達(dá)到較好的一個(gè)控制精度,且各軸的轉(zhuǎn)向控制設(shè)計(jì)時(shí)考慮到整車動(dòng)力學(xué)性能,前后軸轉(zhuǎn)角采用同一基線(動(dòng)車的車鉸側(cè)垂線),保證了車鉸處瞬時(shí)速度與動(dòng)車各軸耦合,一定程度上改善了整車動(dòng)力學(xué)性能;控制模型符合虛擬軌道車的循跡控制要求。
虛擬軌道列車;Ackermann轉(zhuǎn)向原理;循跡控制;模糊控制
交通是城市的命脈,道路規(guī)劃、交通改善也在反映著一個(gè)城市的變遷和發(fā)展[1]。隨著國民GDP水平的提高,我國機(jī)動(dòng)車保有量持續(xù)增長[2],極大地方便了居民出行,但交通擁擠、環(huán)境污染、噪聲污染等問題也凸顯了出來,公共交通的需求量大大增加。
城市軌道交通以其運(yùn)量大、速度快、乘坐環(huán)境舒適等優(yōu)點(diǎn)受到大眾歡迎,但其相對于公交車對道路和運(yùn)行環(huán)境比較低的要求,城市軌道交通的缺點(diǎn)也被放大。軌道交通需要專用的基礎(chǔ)設(shè)施和配套設(shè)施,線路規(guī)劃、橋梁隧道建設(shè)、軌道鋪設(shè)以及后期維護(hù)都需要投入大量的人力物力,運(yùn)行初期往往無法盈利,因此一些中小型城市根本無法承受。而公交車雖然其靈活性好且基礎(chǔ)設(shè)施及運(yùn)行維護(hù)成本低,但是面對日益加快的城市化進(jìn)程和居民出行量的飛速增長,其運(yùn)量遠(yuǎn)遠(yuǎn)不能滿足人們?nèi)粘3鲂行枰R虼四壳俺鞘屑毙枰环N運(yùn)量大、速度快、舒適性好、成本較低的公共交通運(yùn)輸系統(tǒng),在這樣的大環(huán)境下虛擬軌道列車應(yīng)運(yùn)而生。虛擬軌道列車作為一種新型的公共交通運(yùn)輸系統(tǒng),是軌道車輛與傳統(tǒng)汽車的一次融合創(chuàng)新,它將軌道列車運(yùn)量大、乘坐環(huán)境舒適的優(yōu)點(diǎn)與傳統(tǒng)汽車運(yùn)行靈活、運(yùn)營成本低的優(yōu)點(diǎn)結(jié)合起來,既能保證大運(yùn)量,又能減少基礎(chǔ)設(shè)施建設(shè)的投入。
作為一種新型軌道交通工具,其循跡控制效果決定著車輛的安全性和舒適性[3-4],因此對循跡控制進(jìn)行改進(jìn)優(yōu)化具有十分重要的意義。考慮虛擬軌道車的小曲線通過性要求[5-7],基于列車動(dòng)力學(xué)的控制要協(xié)調(diào)車輛之間的關(guān)系使車輛擺動(dòng)、搖頭運(yùn)動(dòng)次數(shù)盡可能少,幅度盡可能小[8];各車輪之間的耦合也要考慮在內(nèi),避免車輪發(fā)生側(cè)滑引起加速輪胎磨耗、降低車輛行駛穩(wěn)定性等問題。基于以上控制要求,本文以Ackermann轉(zhuǎn)向理論為基礎(chǔ),設(shè)計(jì)Ackermann單軸協(xié)調(diào)控制方法并進(jìn)行優(yōu)化。
1 車輛編組模型
本文通過Simpack多體動(dòng)力學(xué)軟件建立起虛擬軌道車輛的動(dòng)力學(xué)模型[9-10],如圖1,車輛為三編組形式,其中首尾車為動(dòng)車,采用雙橫臂獨(dú)立懸架,中間車為浮車,通過車間鉸與前后動(dòng)車連接。其優(yōu)點(diǎn)在于:中間浮車下方無懸架結(jié)構(gòu),降低車體地板面的同時(shí)使地板更加平整、寬敞,客室座椅布置更加方便,選擇性更多;浮車相當(dāng)于二力桿位于首尾車之間,相較于三編組鉸接形式,該布置方式使得車輛之間的運(yùn)動(dòng)干涉較小,車輛轉(zhuǎn)向性能更好;曲線上各車車輪更易趨于純滾,車輛與輪胎橫向動(dòng)力學(xué)性能更好,輪胎磨耗較小。
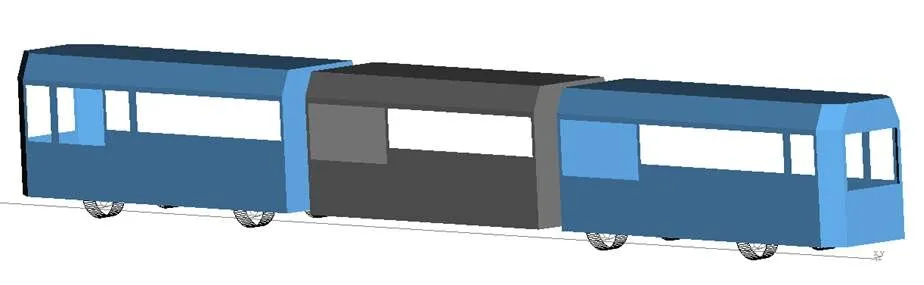
圖1 三編組浮車虛擬軌道車示意圖
2 Ackermann 轉(zhuǎn)向原理
Ackermann轉(zhuǎn)向原理的基本思想為車輛在轉(zhuǎn)彎時(shí),每個(gè)車輪的運(yùn)動(dòng)軌跡均符合自然運(yùn)動(dòng)軌跡,也即各車輪處于純滾動(dòng)狀態(tài),避免輪胎側(cè)滑、胎地側(cè)向力大、車輛操穩(wěn)性變差、輪胎磨耗加劇等動(dòng)力學(xué)問題。在這種狀態(tài)下,同軸內(nèi)外車輪轉(zhuǎn)角不同,且所有車輪路徑的圓心相交于同一圓心,其轉(zhuǎn)向原理示意圖如圖2所示。
圖2 Ackermann轉(zhuǎn)向原理示意圖
因此,在車輛設(shè)計(jì)之初就要根據(jù)車輛的車輪橫向跨距、車軸跨距、轉(zhuǎn)向中心設(shè)計(jì)等因素對車輛轉(zhuǎn)向結(jié)構(gòu)進(jìn)行設(shè)計(jì),使之符合Ackermann轉(zhuǎn)向原理,本文的循跡控制策略正是結(jié)合該原理同多編組列車協(xié)調(diào)模式進(jìn)行研究。
3 Ackermann單軸協(xié)調(diào)控制
Ackermann雙軸單軸協(xié)調(diào)控制為單軸自耦合模型,每個(gè)車軸各一個(gè)轉(zhuǎn)向中心并由其確定左右車輪轉(zhuǎn)角。為了使動(dòng)力學(xué)性能更優(yōu),對單車轉(zhuǎn)向中心基線進(jìn)行限制,使首尾車車鉸減少橫向運(yùn)動(dòng),提高車輛橫向動(dòng)力學(xué)性能。因此將車鉸橫軸線設(shè)置為基準(zhǔn)線,控制其轉(zhuǎn)向中心始終在基準(zhǔn)線上,這樣可以使動(dòng)車的車鉸始終中沿車輛縱向方向運(yùn)動(dòng)。在此控制方法下,各車輪轉(zhuǎn)角關(guān)系如圖3所示。
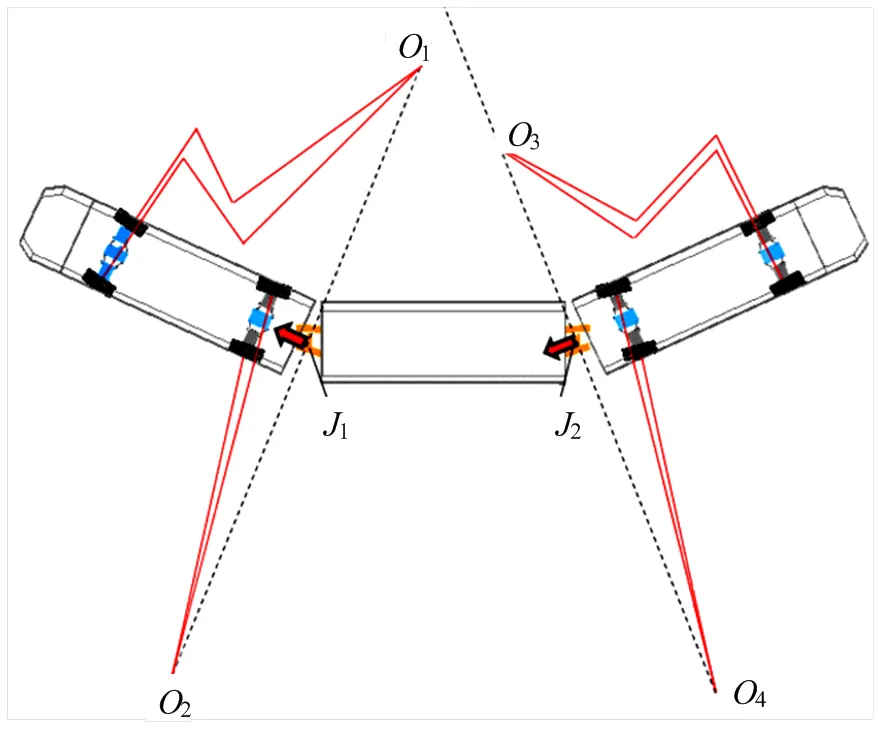
O1、O2、O3、O4為各軸車輪轉(zhuǎn)向中心;J1和J2為頭車與尾車的車鉸。
由于車輛各軸耦合,只需要通過Ackermann轉(zhuǎn)向原理將各軸左右車輪轉(zhuǎn)角關(guān)系建立便可,其轉(zhuǎn)向幾何原理與Ackermann雙軸同向協(xié)調(diào)控制類似,如圖4所示。
通過圖4可以得出各車輪之間的轉(zhuǎn)角關(guān)系如下[11]:
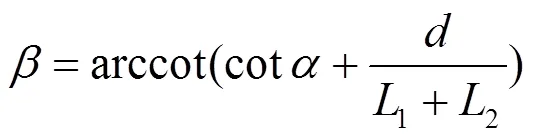
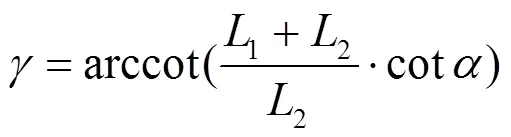
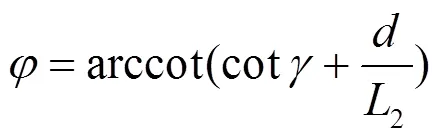
L1為頭車軸距,m;L2為后軸到車鉸的距離,m;d為輪距,m;α為前軸內(nèi)輪轉(zhuǎn)角,m;β為前軸外輪轉(zhuǎn)角,(°);γ為后軸內(nèi)輪轉(zhuǎn)角,(°);φ為后軸外輪轉(zhuǎn)角,(°);e1為二軸內(nèi)輪到其轉(zhuǎn)心的距離,m;e2為二軸外輪到其轉(zhuǎn)心的距離,m。
一二軸采用相同基線,這樣做可以使頭車的車鉸速度方向沿車輛縱向線向前,避免了將車輛的橫擺運(yùn)動(dòng)向后面車輛傳遞,且前后軸均有其獨(dú)立的轉(zhuǎn)角控制的前提下保留了一定耦合關(guān)系,保證車輛與車輪以一種較優(yōu)的姿態(tài)通過曲線。在此控制理論下,各車輪轉(zhuǎn)角以各軸橫向偏差為參考確定,能夠更好地保證車輛循跡精度,實(shí)現(xiàn)較好的車輛循跡控制。
4 控制模型
4.1 控制器選取
虛擬軌道車作為一種新型軌道交通工具,與多鉸接公交車相比最大的區(qū)別在于其獨(dú)特的自導(dǎo)向技術(shù),在公路上按預(yù)設(shè)的既有線路進(jìn)行循跡前進(jìn),由于車輛編組較長,考慮到虛擬軌道車的小曲線通過性要求,避免列車在狹窄路段發(fā)生刮擦,若采用人工駕駛對車輛進(jìn)行控制,不僅精度偏低且容易失誤引發(fā)交通事故,因此采用全輪電控轉(zhuǎn)向?qū)囕v進(jìn)行控制。基于列車動(dòng)力學(xué)的控制要求車輛不僅需要沿預(yù)設(shè)軌道進(jìn)行自動(dòng)循跡,而且要在曲線通過時(shí)協(xié)調(diào)車輛之間的關(guān)系使車輛擺動(dòng)、搖頭運(yùn)動(dòng)次數(shù)盡可能少,幅度盡可能小;各車輪之間的耦合也要考慮在內(nèi),避免車輪發(fā)生側(cè)滑引起加速輪胎磨耗、降低車輛行駛穩(wěn)定性等問題。
PD控制器控制簡單、控制精度高、參數(shù)少易于調(diào)整等優(yōu)點(diǎn),在工業(yè)生產(chǎn)中被廣泛應(yīng)用[12-14]。控制系統(tǒng)動(dòng)態(tài)模式的精確程度是影響控制效果的主要因素,但對于復(fù)雜的系統(tǒng),難以對系統(tǒng)動(dòng)態(tài)進(jìn)行精確描述,傳統(tǒng)控制效果也不理想,而模糊控制作為一種非線性智能控制,通過模糊邏輯對系統(tǒng)進(jìn)行描述,建立模糊規(guī)則庫,可以很好地反映系統(tǒng)動(dòng)態(tài)模式并對系統(tǒng)進(jìn)行控制。考慮到虛擬軌道列車是一個(gè)復(fù)雜的非線性系統(tǒng),對其動(dòng)力學(xué)模型進(jìn)行控制除了要考慮系統(tǒng)參數(shù),還要著重關(guān)系其復(fù)雜多變的運(yùn)行環(huán)境,因此本文通過PD控制器并結(jié)合模糊控制方法對虛擬軌道列車的循跡進(jìn)行控制。
4.2 模糊控制器建立
(1)輸入輸出量及其隸屬度函數(shù)的確定
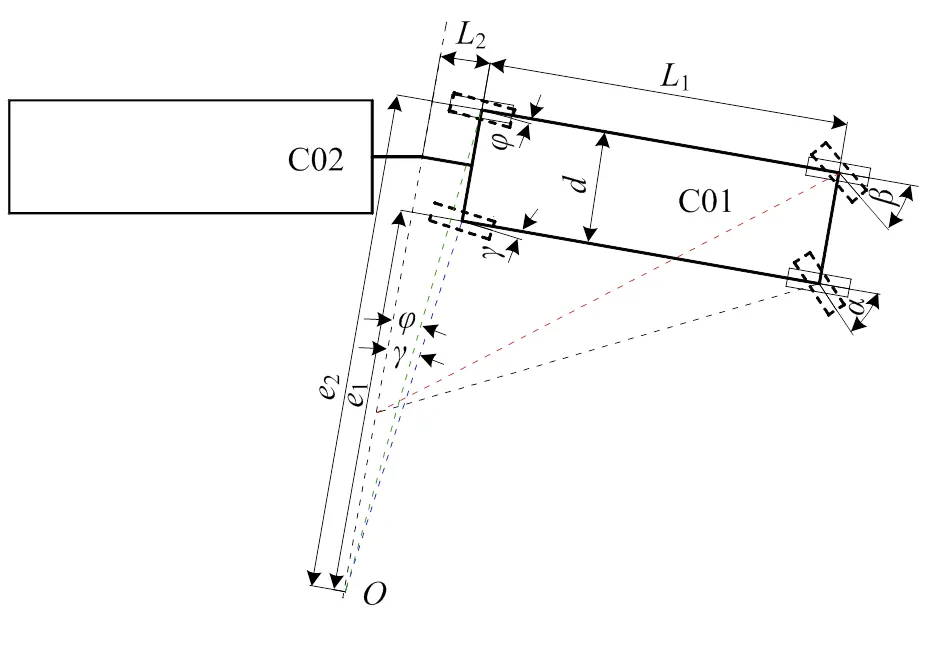
輸入語言選擇車輛循跡橫向偏差和車速,輸出語言變量為控制器比例系數(shù)和微分系數(shù)。首先對輸入?yún)?shù)進(jìn)行模糊化處理,理論上循跡偏差論域范圍取[-∞,∞],但實(shí)際上循跡偏差在控制器作用下會(huì)進(jìn)行修正,偏差范圍不會(huì)無窮大,根據(jù)經(jīng)驗(yàn)循跡偏差論域范圍取[-0.05,0.05],單位為m,循跡偏差模糊集語言定義為{NB,NS,ZE,PS,PB}五個(gè)等級。車輛最大運(yùn)行速度為80 km/h,因此速度論域范圍取[0,80],單位km/h,車速模糊集語言定義為{低速,中速,高速}三個(gè)等級。輸出模糊語言定義為{NB,NM,MS,ZE,PS,PM,PB}七個(gè)等級,的量化論域范圍為[-1500,1500],的量化論域范圍為[-800,800],隸屬度函數(shù)及其論域范圍如圖5所示。
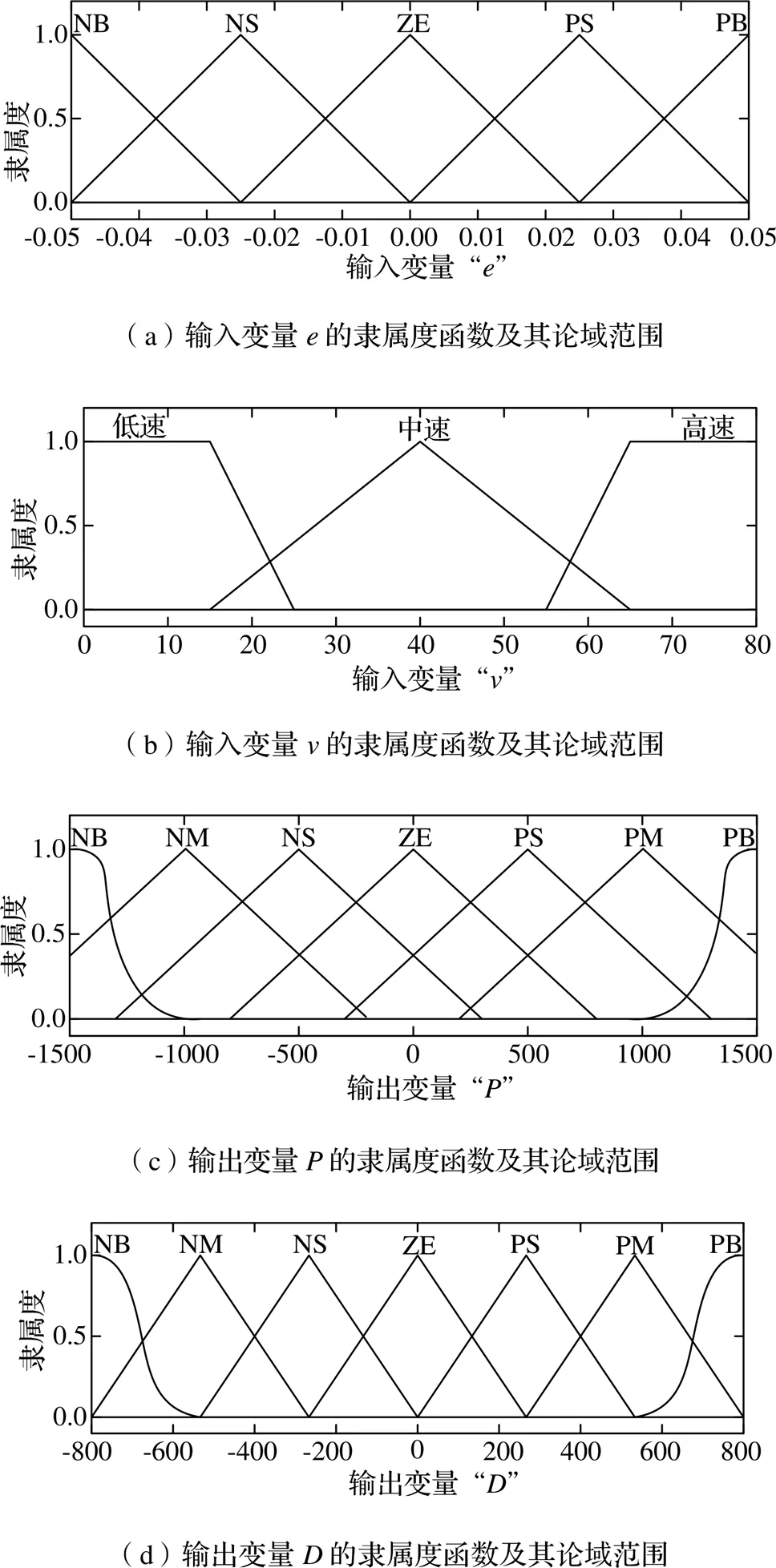
圖5 變量隸屬度函數(shù)及其論域范圍
(2)模糊控制規(guī)則的確定
模糊規(guī)則的建立主要基于駕駛員的駕駛經(jīng)驗(yàn),當(dāng)車輛循跡無偏差時(shí),保持方向盤狀態(tài),當(dāng)車輛出現(xiàn)較大偏差時(shí),若車速低,迅速打方向盤進(jìn)行校正;若車速快則降低打方向盤的速度。對應(yīng)到PID控制器上,其模糊控制原則如下[15]:
①當(dāng)偏差量較大時(shí),取小避免偏差瞬間變大導(dǎo)致微分溢出,若車輛速度較低,取大以提高系統(tǒng)響應(yīng)速度;若車輛速度較高,取小以降低系統(tǒng)響應(yīng)速度。
②當(dāng)偏差量中等大小時(shí),取適中即可,而應(yīng)適當(dāng)減小,保證系統(tǒng)響應(yīng)速度,減少系統(tǒng)的超調(diào)量。
③當(dāng)偏差量較小時(shí),與取小以維持系統(tǒng)穩(wěn)定。
根據(jù)以上原則結(jié)合駕駛員經(jīng)驗(yàn)得到模糊控制規(guī)則表,如表1、表2所示。
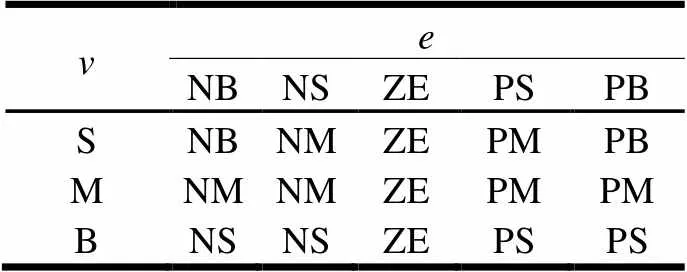
表1 比例系數(shù)P控制規(guī)則矩陣
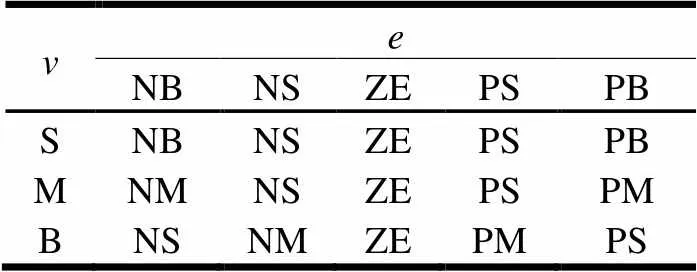
表2 微分系數(shù)D控制規(guī)則矩陣
(3)控制量解模糊化
解模糊化后便可通過基于模糊控制的PD控制器對車輛進(jìn)行循跡控制,運(yùn)用Simulink軟件搭建模糊控制器并定義模糊控制規(guī)則,得到模糊控制表面如圖6所示。
4.3 控制模型建立
控制器控制流程如圖7所示,車輛將實(shí)時(shí)車速和車輛橫向位移輸入到控制器,在控制器中處理得到車輛橫向偏差以及直接測得的實(shí)時(shí)車速導(dǎo)入到模糊控制器,通過模糊控制器完成模糊化、模糊規(guī)則計(jì)算以及解模糊等過程得到PD控制器需要的與,將得到的和以及循跡偏差導(dǎo)入PID模塊,運(yùn)用其中的PD控制模塊根據(jù)控制參數(shù)與橫向偏差得到車輪轉(zhuǎn)角信息,最后通過單軸協(xié)調(diào)控制理論得到各車輪轉(zhuǎn)角并輸入到虛擬軌道列車模型實(shí)現(xiàn)循跡控制仿真。
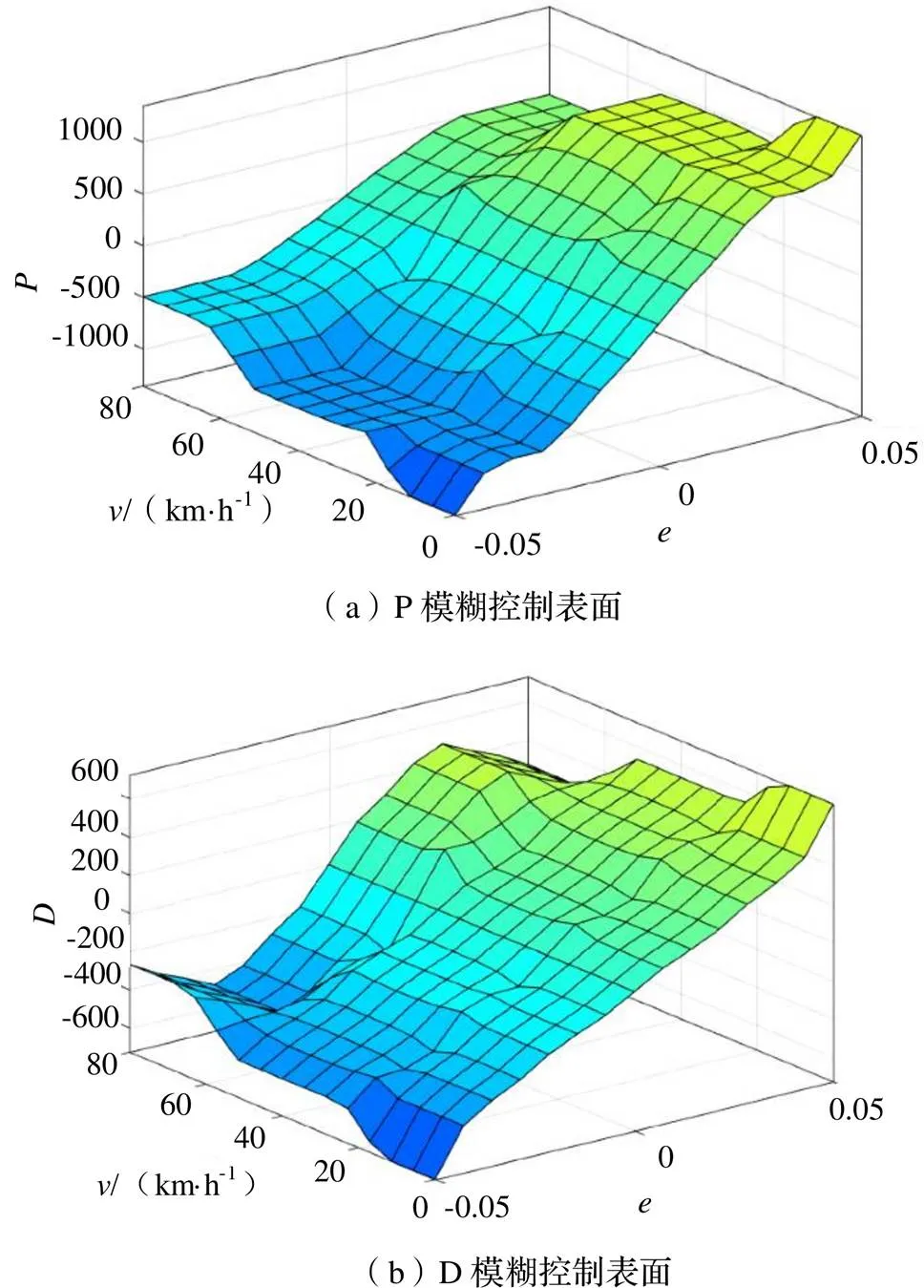
圖6 雙輸入單輸出表面
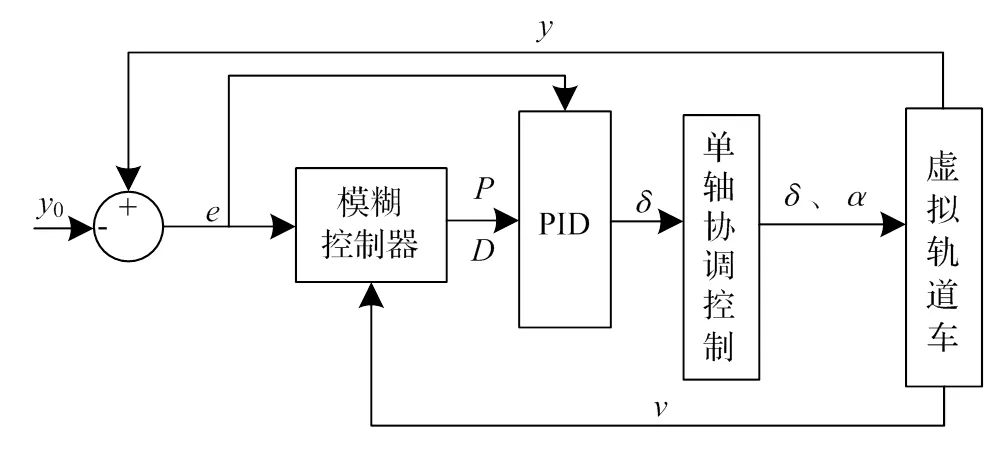
圖7 系統(tǒng)仿真流程圖
5 控制結(jié)果及優(yōu)化
Ackermann單軸協(xié)調(diào)控制下,通過對動(dòng)車前后車軸附近循跡點(diǎn)的橫向偏差進(jìn)行反饋循跡控制,可以對動(dòng)車整體姿態(tài)進(jìn)行約束控制,避免動(dòng)車后軸橫向偏差較大的問題,而且單車兩軸并不是完全解耦狀態(tài),通過對轉(zhuǎn)向基線進(jìn)行控制,最大程度保證車輛曲線通過性能以及中間浮車的動(dòng)力學(xué)性能。通過該控制理論對車輛進(jìn)行循跡控制的仿真,圖8為車輛以14 km/h速度通過20 m曲線下各軸橫向偏移量。
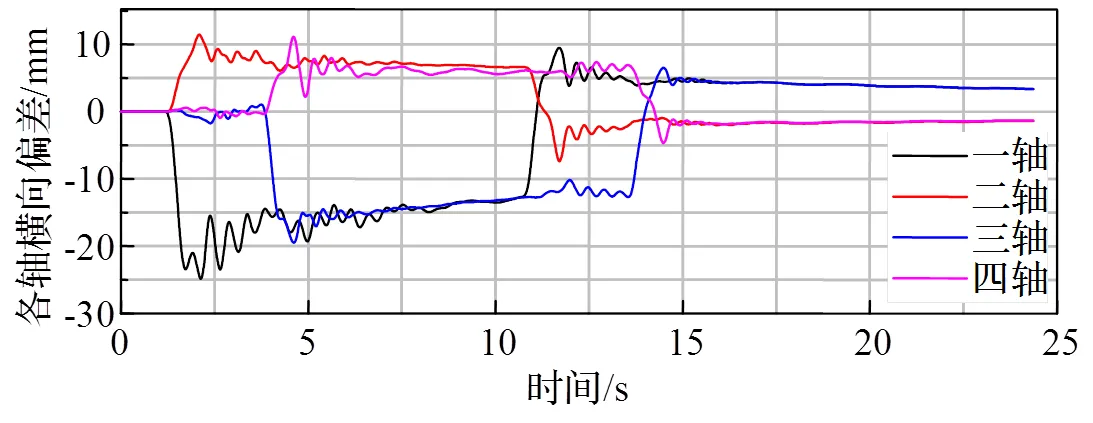
圖8 Ackermann單軸協(xié)調(diào)控制仿真結(jié)果
通過仿真結(jié)果可以發(fā)現(xiàn),各軸車輪速度與轉(zhuǎn)向角度均符合預(yù)期的車輛通過曲線運(yùn)動(dòng)狀態(tài);通過曲線時(shí)穩(wěn)態(tài)車輪轉(zhuǎn)角變化幅度小,車輛橫向穩(wěn)定性好;通過該20 m曲線時(shí),車軸最大橫向偏移量在2.5 cm以內(nèi),循跡性能優(yōu)秀。
6 結(jié)論
(1)雖然基于Ackermann單軸協(xié)調(diào)控制從運(yùn)動(dòng)學(xué)角度上不能實(shí)現(xiàn)完美的各車輪“純滾”過彎,但通過對動(dòng)車前后兩個(gè)循跡點(diǎn)的偏移量進(jìn)行控制,便可以對首尾車進(jìn)行較好的約束,從而達(dá)到較好的一個(gè)控制精度;
(2)雖然稱之為“單軸協(xié)調(diào)”,但在各軸的轉(zhuǎn)向控制設(shè)計(jì)時(shí)對基線的選取有考慮到整車動(dòng)力學(xué)性能,在一定程度上改善了整車動(dòng)力學(xué)性能;
(3)基于Ackermann單軸協(xié)調(diào)控制可以較好的滿足虛擬軌道車輛的循跡要求。
[1]夏馳雨. 我國西部大城市公共交通服務(wù)質(zhì)量研究[D]. 成都:電子科技大學(xué),2015.
[2]中國新聞網(wǎng). 中國機(jī)動(dòng)車駕駛?cè)顺?億2018小汽車保有量首破2億[J]. 城市交通,2019(2):127-127.
[3]孫超,楊前明,王飛,等. 基于協(xié)同模糊控制的四輪驅(qū)動(dòng)AGV穩(wěn)定性研究[J]. 機(jī)床與液壓,2020,48(17):162-169.
[4]孫幫成. 虛擬軌道列車及其關(guān)鍵技術(shù)研究[D].北京:北京交通大學(xué),2019.
[5] Xiao L , Guo S Y , Yuan X W , et al. Analysis of Vision Based Automatic Steering Control for an Articulated All Wheel Steered Vehicle[C]// 2016 IEEE Vehicle Power and Propulsion Conference (VPPC). IEEE, 2016.
[6]肖超,蒲果,李楠,等. 基于偏差預(yù)測模型的車道保持及自動(dòng)對中研究[C]. 2013中國汽車工程學(xué)會(huì)年會(huì),2013.
[7]袁希文,馮江華,胡云卿,等. 智軌電車自動(dòng)循跡感知與控制系統(tǒng)[J]. 控制與信息技術(shù),2020(1):19-26.
[8]曹競瑋. 虛擬軌道有軌電車循跡特性及力矩分配研究[D]. 成都:西南交通大學(xué),2017.
[9]劉永強(qiáng),戴煥云. 鐵道車輛動(dòng)力學(xué)模型設(shè)計(jì)及優(yōu)化分析[J]. 機(jī)械,2018,45(12):1-3.
[10]賈鵬,池茂儒,李浩天,等. 扭轉(zhuǎn)剛度和扭轉(zhuǎn)阻尼對虛擬軌道車輛性能的影響分析[J]. 機(jī)械,2019,46(10):22-30.
[11]劉燕斌,陳晉榮,趙陳闖. 車輛轉(zhuǎn)向梯形建模及優(yōu)化設(shè)計(jì)[J].科技風(fēng),2016(18):166-167.
[12]何芝強(qiáng). PID 控制器參數(shù)整定方法及其應(yīng)用研究[D]. 杭州:浙江大學(xué),2005.
[13]王偉,張晶濤,柴天佑. PID參數(shù)先進(jìn)整定方法綜述[J]. 自動(dòng)化學(xué)報(bào),2000(3):347-355.
[14]吳宏鑫,沈少萍. PID控制的應(yīng)用與理論依據(jù)[J]. 控制工程,2003(1):37-42.
[15]崔吉,張燕超,段向軍,等. 全方位移動(dòng)機(jī)器人模糊PID控制算法研究[J]. 機(jī)械,2019,46(8):47-51,80.
Research on Tracking Control Based on Ackermann Steering Geometry
CHEN Yongfa,CHI Maoru,GUO Zhaotuan,ZHAO Yunlong
( State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China )
In order to study the control method of virtual rail vehicles, in this paper, a multi-body dynamics model of the three-carriage virtual rail train is established, and a multi-carriage train tracking control method based on the Ackermann steering geometry from the perspective of vehicle dynamics is proposed, and a vehicle fuzzy tracking control model based on the combination of the fuzzy control geometry and PID control theory is constructed thtough Simulink. The Co-simulation proves that the single-axis coordinated control based on Ackermann cannot achieve a perfect "pure roll" cornering of each wheel from a kinematics point of view, but it can better constrain the front and rear cars to achieve a better control accuracy. In addition, since the dynamics of the whole vehicle is taken into consideration during the steering control design of each axle, the baseline (the vertical line of the hinge side of the motor car) adopted to the front and rear axle angles are the same, which ensures that the instantaneous speed at the hinge is coupled with each axis of the motor car and thus improves the overall vehicle dynamics performance. Also, the control model meets the tracking control requirements of the virtual rail car.
virtual rail train;Ackermann steering geometry;traction control;fuzzy controll
U270.1+1
A
10.3969/j.issn.1006-0316.2021.06.006
1006-0316 (2021) 06-0035-06
2021-01-14
國家重點(diǎn)研發(fā)計(jì)劃(2018YFB1201600、2018YFB1201603-05);牽引動(dòng)力國家重點(diǎn)實(shí)驗(yàn)室自主課題(2018TPL_T04)
陳永發(fā)(1996-),男,山東濰坊人,碩士研究生,主要研究方向?yàn)檐囕v系統(tǒng)動(dòng)力學(xué),E-mail:321041911@qq.com。