油浸式變壓器故障檢測仿生機器人結構設計及分析
2021-07-15 02:48:48朱太云柏祖軍吳勇軍張世武陳忠胡迪
機械工程師 2021年7期
朱太云 柏祖軍 吳勇軍 張世武 陳忠 胡迪
(1.國網(wǎng)安徽省電力有限公司 電力科學研究院,合肥 230000;2.中國科學技術大學,合肥 230031)
0 引言
隨著國民經(jīng)濟的快速發(fā)展,用電需求日益增長,對電網(wǎng)的安全穩(wěn)定運行也提出了更高的要求。變壓器在電網(wǎng)中是實現(xiàn)新能源高效、經(jīng)濟的大規(guī)模匯集和構建直流輸配電一體化網(wǎng)絡的關鍵設備[1]。為保證變壓器安全、正常、高效工作,需要定周期對變壓器進行故障檢測,消除變壓器的安全隱患。油浸式變壓器正常人工檢修工序復雜、耗時長,使用油浸式變壓器故障檢測機器人代替人工進行故障檢測可以大大提高油浸式變壓器故障檢修效率。
為實現(xiàn)使用油浸式變壓器故障檢測機器人對油浸式變壓器進行故障檢測,解決傳統(tǒng)油浸式變壓器故障檢測施工周期長的問題。本文提出一種油浸式變壓器故障檢測仿生機器人的結構設計方案。在機器人中部和尾部分別使用兩自由度仿生胸鰭和雙尾鰭作為驅動器,并且在重心位置處安裝有沉浮機構實現(xiàn)上下的沉浮運動。完成了仿生機器人的整體結構設計方案,使用流體仿真工具對其運動學進行分析,并且加工制作了試驗樣機。
1 油浸式變壓器故障檢測仿生機器人方案設計
1.1 油浸式變壓器內部環(huán)境分析
油浸式變壓器內部主要有油箱、鐵芯、繞組等組成。變壓器油箱是變壓器的鐵質外殼,設置有人孔,方便不吊罩檢查。鐵芯是變壓器基本的組成部件之一,作為變壓器的導磁通路使用硅鋼片疊成,鐵芯分為鐵芯柱和鐵軛兩個部分,鐵芯柱上套繞組,鐵軛將鐵芯連接起來使之形成閉合磁路。繞組是變壓器的導電回路,繞組都繞制在鐵芯上。其中繞組和繞組、繞組和油箱之間留有一定間隙,通常在發(fā)生故障的情況下,技術人員通過油箱上預留人孔進入變壓器內部通過預留的間隙進行檢修工作。
油浸式變壓常見故障有絕緣老化、變壓器油油質劣化、相間短路[2]等,基本上都可以通過視覺直觀判斷故障類型。加之油浸式變壓器內部組成結構環(huán)境復雜。預留通過空間有限,不利于人工進入其內部進行檢修工作,使用仿生檢測機器人進行油浸式變壓器故障檢測極具優(yōu)勢。
1.2 仿生機器人整體結構方案設計
油浸式變壓器內部環(huán)境的特殊性,決定了仿生機器人的結構特點:1)仿生機器人工作在變壓器油中,要求機器人外殼具有一定的強度能夠抵抗下潛時變壓器油的壓力,同時為了便于裝配及后期維護,仿生機器人外殼應具有可拆卸的密封結構;2)在油浸式變壓器內部仿生機器人要能夠在完成上浮下潛、前進后退、轉彎等機動動作,要求仿生機器人的驅動機構能夠提供足夠方向的驅動力;3)使用仿生機器人的根本目的是采集變壓器故障信息,所以殼體內部需要規(guī)劃合理,預留空間用于攜帶高清相機;4)油浸式變壓器內部繞組與繞組、繞組與油箱之間空間狹小要求仿生機器人的整體尺寸能夠控制在合理范圍內。
根據(jù)對油浸式變壓器故障檢測工作環(huán)境要求的具體分析,本文設計了兩自由度胸鰭與雙尾鰭驅動的仿生檢測機器人,實物圖如圖2所示。從整體上看仿生外殼分為3個部分:頭部內放置攝像頭及兩自由度仿生胸鰭;殼體中部放置有沉浮控制機構、鋰電池及主控;尾端起到密封作用并固定有雙尾鰭驅動器。
圖2 仿生故障檢測機器人樣機
2 油浸式變壓器故障檢測仿生機器人機械結構設計
2.1 仿生機器人外殼、密封結構設計
在大自然中魚類具有優(yōu)秀的機動性和靈活性與其合理的流體外形具有密不可分的聯(lián)系。借鑒魚類合理的仿生外形利用仿生學設計出適合仿生內檢機器人的外殼[3]。
從加工及裝配考慮外殼設計為3個部分:頭部外殼、中段外殼及尾部外殼。其中各部分之間通過螺栓連接固定。中部外殼和尾部外殼在連接處設計有密封結構,二者連接形成一個密封閉合的艙體。其中頭部的外殼內包含有一個密封透明艙用于固定高清相機。整體外殼使用ABS塑料制造,整個殼體的尺寸為20 cm×16 cm×12 cm,在常用材料中ABS塑料具有優(yōu)異的抗沖擊性能和耐低溫性能、表面光澤性好、易加工成型、尺寸穩(wěn)定等特點[4]。
使用O形圈密封主要是靠具有彈性的密封件在壓力的作用下發(fā)生變形,將密封結構的間隙填滿實現(xiàn)有效密封[5]。密封圈密封原理如圖4所示。密封圈在外力作用下變形對接觸面有正壓力Pl,當一側進入液體時,液體對密封圈作用壓力為P,此時接觸面壓力Pl也相應增大變?yōu)镻m。若此時的接觸壓力Pm大于液體對密封圈的壓力P,則密封有效;反之則密封失效,密封件會發(fā)生液體泄漏。在選取密封圈過程中盡量保持足夠的密封接觸面積,避免橡膠圈永久變形[6]。

圖3 機器人外殼爆炸結構視圖
圖4 O形圈密封示意圖
根據(jù)密封原理,采用可拆裝式的凹槽內沉入橡膠圈配合凸臺壓緊形式的密封方式。相比于常用的橡膠圈直接密封方式密封效果更可靠。在裝配時先將O形密封圈放入到凹槽內,將尾鰭凸臺對準位置再使用螺栓緊固完成連接及密封。密封圈材質為丁腈橡膠。根據(jù)GB/T 3452.3-2005受外部壓力的標準密封圈尺寸選用密封圈內徑d1=119 mm,密封圈截面直徑d2=1.9 mm。
2.2 檢測機器人仿生驅動設計
機器人在變壓器油中需要完成上浮下潛、前進后退、轉彎等機動動作,驅動器需要提供3個平移自由度方向及沿豎直方向旋轉自由度的驅動力。使用兩自由度胸鰭配合雙尾鰭驅動可以滿足設計要求。
在考慮到驅動器尺寸和控制的方式,其中兩自由度胸鰭由左右對稱的4個防水舵機構成,因此不需要考慮驅動機構的密封結構。胸鰭的復雜運動規(guī)律是由各個單自由度運動合成的,每側兩個舵機分別負責旋轉和上下拍翼運動。驅動旋轉的舵機通過舵機連接架固定在拍動舵機的輸出軸上,2個拍動舵機使用舵機固定架固定在頭部外殼中。按照控制程序設置的頻率、相位、振幅在舵機的驅動下完成預定的各種游動模式。
尾鰭使用放置夾角為30°的2個舵機驅動,在水平面內往復擺動為本體提供驅動力。通過調整舵機的對稱轉動中心,可以實現(xiàn)直線游動和左右轉彎游動。
仿生內檢機器人驅動系統(tǒng)由雙尾鰭和兩自由度胸鰭構成。主要的推進力由雙尾鰭提供,同時改變雙尾鰭的轉動中心也能實現(xiàn)轉向功能;兩自由度胸鰭在游動過程中主要用來保持仿生內檢機器人平衡、姿態(tài)微調、小空間內轉彎及實現(xiàn)精確游動定位等。
2.3 檢測機器人沉浮機構設計
圖5 密封圈壓縮剖面圖
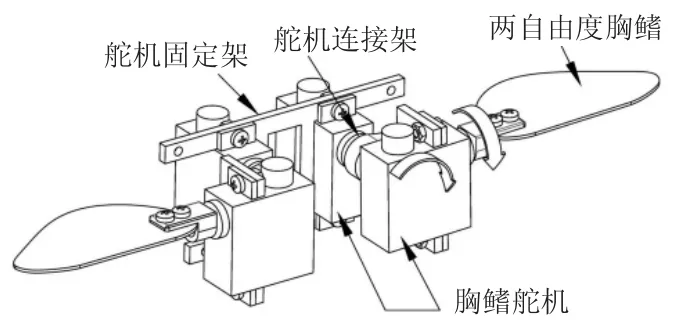
圖6 兩自由度胸鰭結構
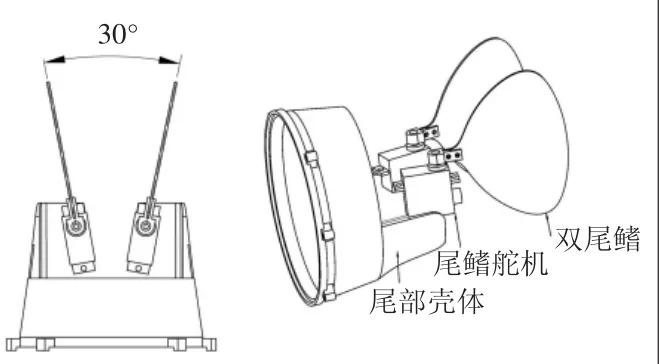
圖7 雙尾鰭結構
現(xiàn)階段,仿生魚實現(xiàn)沉浮的方式主要有胸鰭調節(jié)、仿生魚鰾調節(jié)、重心調節(jié)等[7]。這些方法的原理都是改變仿生魚本體的重力和收到浮力之間的關系或者是改變胸鰭的受力方向,來達到仿生魚在豎直方向上的運動。但是目前所報道的浮力調節(jié)機構尺寸過大不適用于小型的仿生機器人。
為增加仿生機器人在豎直方向上的機動性,本文設計一種活塞式沉浮調節(jié)機構。主要由減速齒輪組、電動機、氣缸、活塞、螺桿組成。通過直流電電動機控制螺桿上下運動來控制排出變壓器油的體積,可以改變內檢機器人所受浮力與重力之間的關系,實現(xiàn)垂直方向上的高機動性運動。為了在調節(jié)浮力過程中不改變機器人的姿態(tài),在安裝沉浮控制機構后需要添加平衡塊微調重心,使得重心與氣缸中心線重合。
同時為了避免螺桿位移過度對機械結構造成破壞,在氣缸兩端極限位置安裝有霍爾傳感器來限制其運動極限位置,當螺桿運行到極限位置時會觸發(fā)中斷信號停止螺桿向當前方向的移動。
沉浮機構的性能特征參數(shù)如表1所示。活塞運行到極限位置產(chǎn)生的豎直方向上的驅動力為

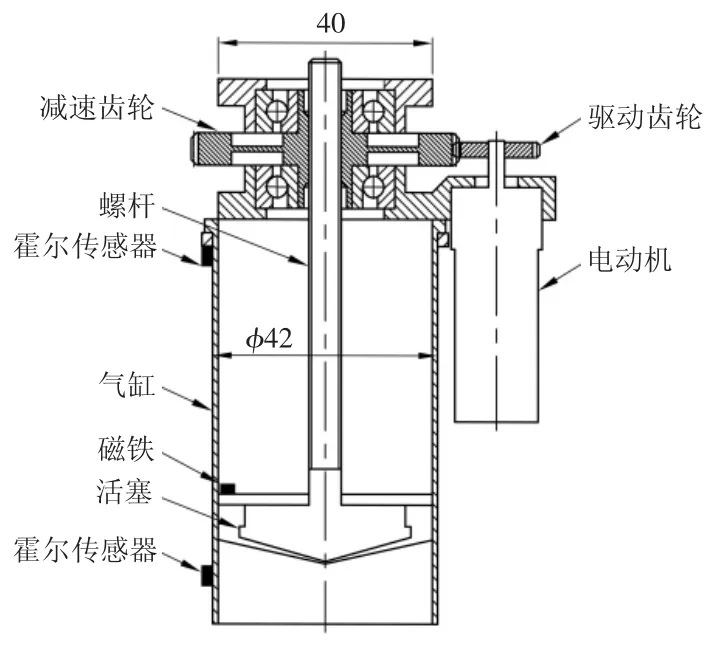
圖8 沉浮機構結構

有效行程/mm 活塞移動速度/(mm·s-1) 最大推力F/N 70 2.3 140?
當仿生機器人處于變壓器底部時(極限深度h=10 m),活塞除了承受機器人內外氣壓差產(chǎn)生的壓力FΔp外還要承受變壓器油產(chǎn)生的壓力Fo,為了保證電動機能正常驅動活塞運動,活塞最大推力F要大于所受壓力FΔp、Fo之和。其中:

活塞所受壓力之和為Fp=FΔp+Fo=135 N,小于推桿最大推力140 N,驗證了極限情況下的沉浮機構的有效性。
3 動力學分析與仿真
3.1 仿生機器人胸鰭受力分析
在游動過程中,由于胸鰭具有2個自由度,受力復雜,對胸鰭所受的力重點分析。定義左右2個胸鰭面法線與XZ面夾角為αR、αL;與XY面夾角為βR、βL。在XZ面投影與X軸夾角分別為αRt、αLt;在XY面投影與X軸夾角分別為βRt、βLt。
假定胸鰭是剛性的,運動過程中左右胸鰭受到流體正壓力分別為FR、RL。通過對右側胸鰭受力分析可知,胸鰭在運動過程中仿生機器人本體受到沿坐標軸分力[FxFyFz]為
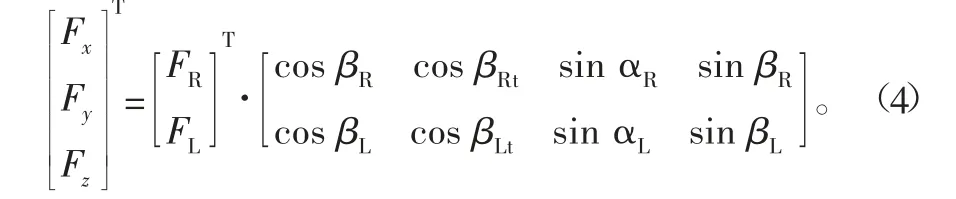
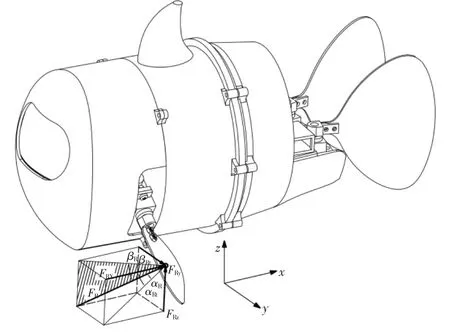
圖9 胸鰭受力分析示意圖
通過調節(jié)左右2個胸鰭不同的攻角和擺角就能獲得方向大小不同的驅動力[FxFyFz],依靠兩自由度胸鰭就可以滿足上浮下潛、前進后退、轉彎等機動動作,為了獲得更好的機動性,設計雙尾鰭來增加推進力。
3.2 仿生機器動力學仿真
使用通用的計算流體力學分析軟件Fluent對仿生機器人的水動力性能進行仿真分析。首先對仿生機器人外殼模型簡化后導入Workbench中進行流體動力學仿真。首先在劃分網(wǎng)格[8]后仿真出運動過程中流場內速度等值線的分布圖,如圖10所示。

圖1 油浸式變壓器結構
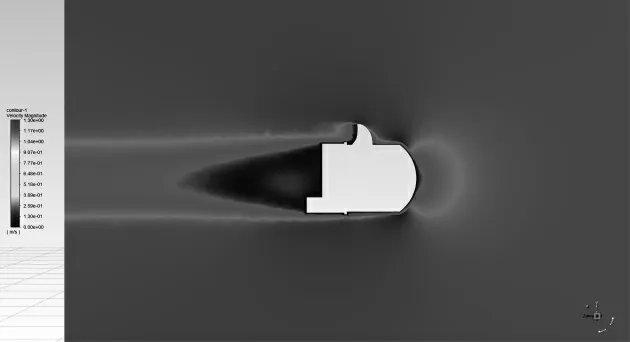
圖10 運動過程中速度等值線
通過結果可以看出,運動過程中對周圍流場干擾程度較小,較符合外殼設計目標。為了研究雙尾鰭的推進性能,利用動網(wǎng)格技術通過用戶自定義函數(shù)(user defined functions,UDF)控制尾鰭的擺動來得到所需的流場信息。
當尾鰭以實際擺動頻率2 Hz、擺動幅度為±45°運動時,流場速度矢量形狀如圖11所示,通過觀察流場變化可以看出,雙尾鰭造成的流場會產(chǎn)生相互耦合來增加尾鰭的推力。
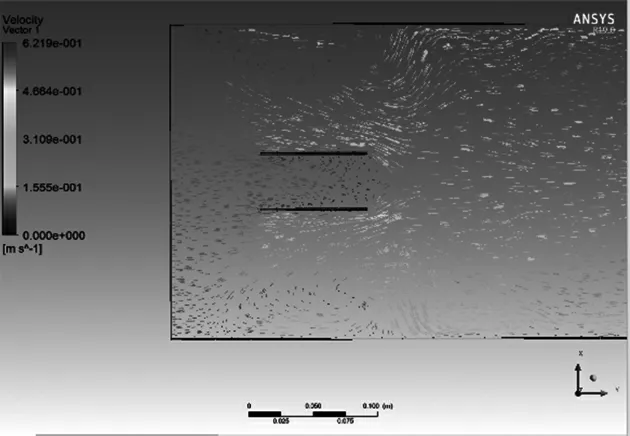
圖11 雙尾鰭XY平面內流場速度矢量圖
在對雙尾鰭推力性能進行仿真分析時增加了另外兩組形狀不同的尾鰭作為對照組,以便為后期尾鰭優(yōu)化提供思路。對仿真結果分析可知,雙尾鰭產(chǎn)生的推力是周期交變的,推力峰值出現(xiàn)在兩個尾鰭匯合時。在不同形狀尾鰭推力圖(圖12)中可以看出仿生尾鰭的推力性能更好,驗證了仿生尾鰭在實際中推力效果更好的現(xiàn)象。
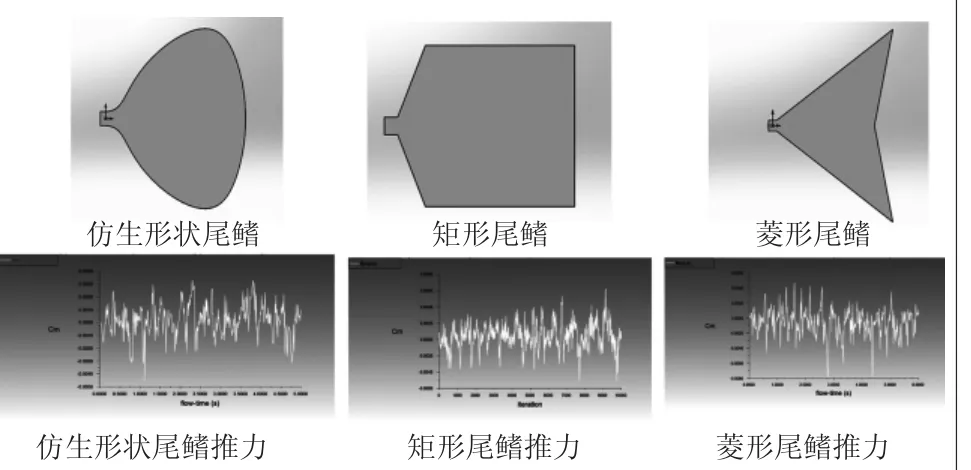
圖12 不同形狀的尾鰭產(chǎn)生的推力
4 結語
本文從油浸式變壓器故障檢測需求出發(fā),從殼體、密封設計、仿生鰭設計、沉浮機構設計、結構分析與流體仿真等方面對本文進行的工作進行介紹。提出了一種用于油浸式變壓器內部故障檢測的仿生機器人結構設計,對沉浮機構產(chǎn)生驅動力大小及有效性進行驗證計算,并對兩自由度胸鰭和雙尾鰭進行了分析和流體仿真。計算分析及仿真結果表明,沉浮機構在極限深度情況下可以產(chǎn)生豎直方向的驅動力完成沉浮動作,仿生兩自由度胸鰭及尾鰭可以產(chǎn)生驅動力滿足上浮下潛、前進后退、轉彎等機動動作需求。為下一階段仿生檢測機器人應用于油浸式變壓器故障檢測奠定良好的基礎。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
通信電源技術(2018年3期)2018-06-26 06:33:30
汽車維護與修理(2016年10期)2016-07-10 08:17:41
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年4期)2016-05-17 05:35:38
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
通信電源技術(2016年3期)2016-03-26 07:13:46