水下巖塞高精度空間地理信息獲取方法與應用
2021-07-15 07:19:40趙亞峰
水利技術監督 2021年6期
關鍵詞:測量
趙亞峰
(遼寧省朝陽水文局,遼寧 朝陽 122000)
巖塞口是輸水工程的咽喉部位,其空間地理信息數據是設計、施工的基礎數據,一旦基礎數據質量出現問題,將直接影響設計質量和執行力度,還會產生難以估量的經濟損失和社會影響。因此研究水下巖塞高精度空間地理信息獲取,對于輸水工程提前竣工,提前發揮工程效益起了重要作用。隨著科技的不斷進步,人們對水下信息的需求越來越高,一方面希望更加清晰的呈現復雜多樣的水下地形地貌細節,另一方面希望單位時間內獲得更多的測量結果。因此,如何進一步提高水下測深設備的測量精度和效率成為當前急需面對與解決的難點。早期的測深手段包括測深桿、測深錘、單波束測深,而多波束測深儀的誕生則把水下測深技術從“點-線”測量時代帶入了“線-面”測量時代,從而使水下地形地貌信息進入了高效精細化測量階段。為高質量完成水下巖塞高精度地理信息的獲取,本文采用GPS RTK技術、多波束測深技術、水下機器人ROV技術、三維成像聲吶掃描技術來完成本工程巖塞口測量外業數據采集任務,通過多元函數慮差法和水下高程控制網對數據進行精細處理。
1 水下測量技術
1.1 水下地形地貌獲取方法研究
水下地形獲取方法主要通過定位和測深來完成。定位可采用衛星定位,測深的方法主要包括單波束測深系統、多波束測深系統、機載激光測深系統等。單波束測深系統是“線”的測量模式,操作簡單,成本較低,但成果精度低;機載激光測深系統可以快速提供覆蓋水下的地形數據,但受水質影響較大,由于激光腳點密度較小,不能最大程度還原水下真實地形,而且成本較高;多波束測深系統是“面”的測量形式,數據處理復雜,成果精度高,相對成本較低。
1.2 水下工程環境探測方法研究
水下工程環境探測可通過潛水員攜帶探測設備和水下機器人來完成,因水下環境復雜、不明的情況等,作業任務會受到極大的限制,存在較大的風險性。針對復雜未知環境,水下機器人優勢明顯。水下機器人分兩種,一種是有纜水下機器人即“遙控式水下機器人ROV”,其特點:動力充足、作業時間不受限制,輕巧、靈活性高,環境適應性好,工作高效,通訊穩定;第二種是無纜水下機器人即"自治式水下機器人AUV,其特點:自主性和靈活性更高,水下運行時間短、活動范圍有限、通訊和智能化要求高。
1.3 水下三維模型的獲取方法研究
水下三維模型可通過多波速技術或者三維成像掃描技術來完成,由于巖塞口的特殊性,多波束技術的作業范圍無法對巖塞口內部全覆蓋。與多波束技術相比,三維成像掃描技術數據分辨率更高,可提供非常優秀的圖像質量,全方位工作。但不能提供三維模型的絕對空間位置。可通過融合多波速數據與三維成像掃描數據,即解決了空間位置問題,又可形成巖塞口整體的三維模型。
1.4 數據精細處理方法研究
數據采集精度可通過自動化程度高、標稱精度高的儀器設備來完成,為提高水下測量成果質量可從數據處理方法入手。首先對數據拼接融合的誤差問題、數據拼接質量控制方法進行分析,基于目前誤差處理方法,對數據拼接、數據融合方法進行優化設計,最后建立水下高程控制網對拼接、融合數據進行糾正。
2 巖塞口地形圖測量
2.1 外業數據采集
地形圖外業數據采集要通過兩部分來完成,分別是陸地部分和水下部分。陸地部分采用Leica TS30全站儀無棱鏡技術來完成,按1∶100精度施測,施測地面點間距離一般不大于3m。地形變化較大的地方進行加密測量,地形較平坦的點間距離可加大。水下部分采用GPS RTK技術、Sonic 2024多波束測深儀與其匹配的Octans高精度姿態傳感器使用多波束采集軟件Qinsy進行數據采集,共計記錄9條測線。
2.2 數據處理
多波束數據處理采用cairs,數據經過安裝姿態改正、噪點刪除、潮位改正、聲速改正、數據合并、生成表面、坐標轉換、數據輸出等步驟生成點云數據。內業使用南方CASS9.0標準化軟件成圖,地形圖等高距為0.2m,高程注記0.01m。處理后的水下地形如圖1所示。概略成圖后,對現場進行巡視檢查,對地形有異議的,明確后進行了修正。同時對已知數據進行了檢查,精度滿足規范要求。

圖1 水下地形圖(局部)
3 水下巖塞工程環境探測與巡視
經多波束掃測后,確認巖塞口的具體位置,對水下巖塞進行了檢測,拍攝視頻文件。由于水下情況相對復雜,水下機器人共計下潛2次。第一次下潛后對洞口頂部以及內部水泥構件進行了檢測,由于遇到外露的鋼筋,為防止水下機器人的安全,經小組研究,先行將水下機器人撤回,再安排第二次下潛。為防止線纜被鋼筋所纏,采取水下機器人直上直下的觀測方式,盡量避免水下機器人的平推等水平方向的運動,第二次下潛,主要對涵道壁進行了觀測,并記錄相關視頻數據,如圖2所示。

圖2 水下視頻截圖
4 巖塞口高精度三維成像
4.1 數據采集與處理
由于水下存在多處鋼筋,三維聲吶共計掃測3次,每次掃測30min左右,共進行了2個固定點掃測。三維聲吶內業數據處理采用 Proscan數據采集軟件以及實測數據后處理軟件共同進行,實測數據的處理主要包括:實測數據噪音干擾預處理、各站實測數據合并。最后,將多波束數據與BV5000三維聲吶采集數據合并,采用多元函數濾差法進行人工干預,最后形成整體的水下三維模型圖,處理結果如圖3—5所示。
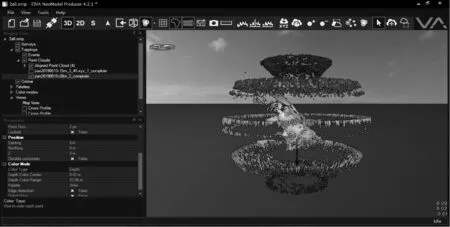
圖3 噪音干擾刪除
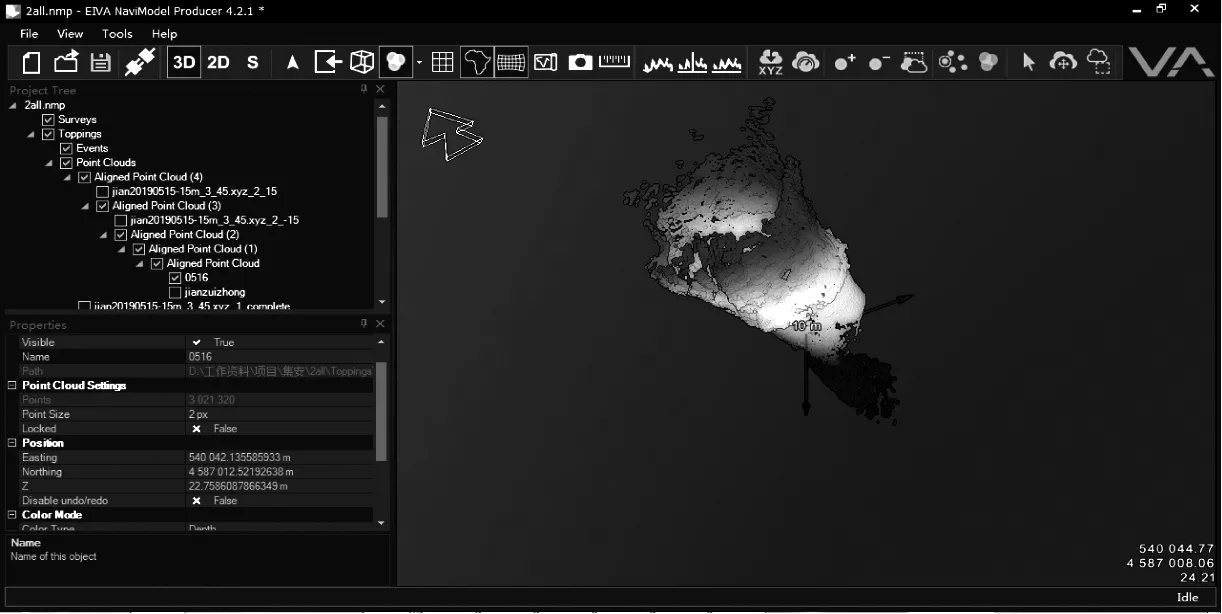
圖4 噪音干擾刪除后
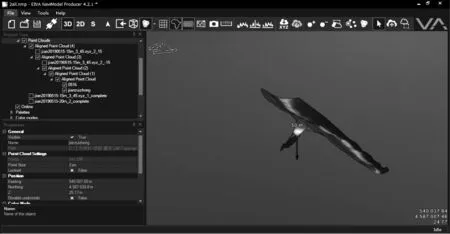
圖5 多波束數據及BV5000數據融合
4.2 建立水下高程控制網
本次共布設23個水下高程控制點,在巖塞口位置進行了加密。以“桓集隧道工程巖塞口施工控制網復測成果”為起算點,使用南方S86T 雙頻GPS接收機、50m可調鉆桿、鉆井平臺等設備,采用快速靜態的方式進行測量作業,每個點測量時間均大于5min。內業處理采用GPS網平差處理軟件CosaGPS V6.0進行坐標平差和高程擬合計算,解算出每個控制點的平面和高程,結果見表1。最后通過水下高程控制網對上述成果數據進行糾正。
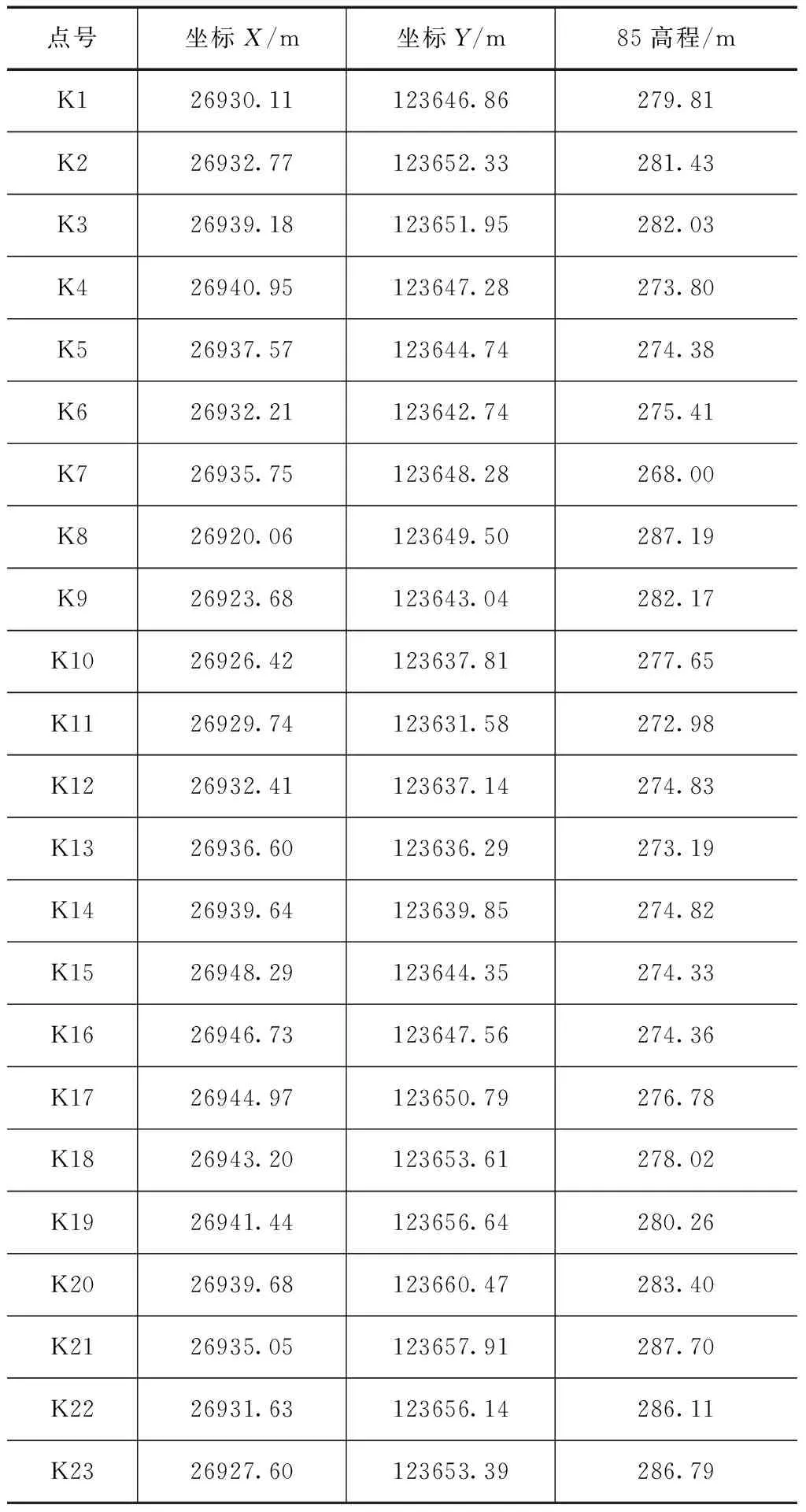
表1 水下高程控制網成果表
4.3 斷面測量
為了準確反映洞內欠挖、超挖情況,本次以整體的水下三維模型圖為基礎,起點垂直于洞軸線,向洞內方向布設斷面,斷面間隔為0.2m。將斷面切面與水下三維模型圖相交所得的點云數據連接起來構成斷面圖,如圖6所示。通過實際斷面成果與設計斷面比較,除進口底部左側凸出一長4m、寬2m、高1.5m的巖體,其余部位成型較好。
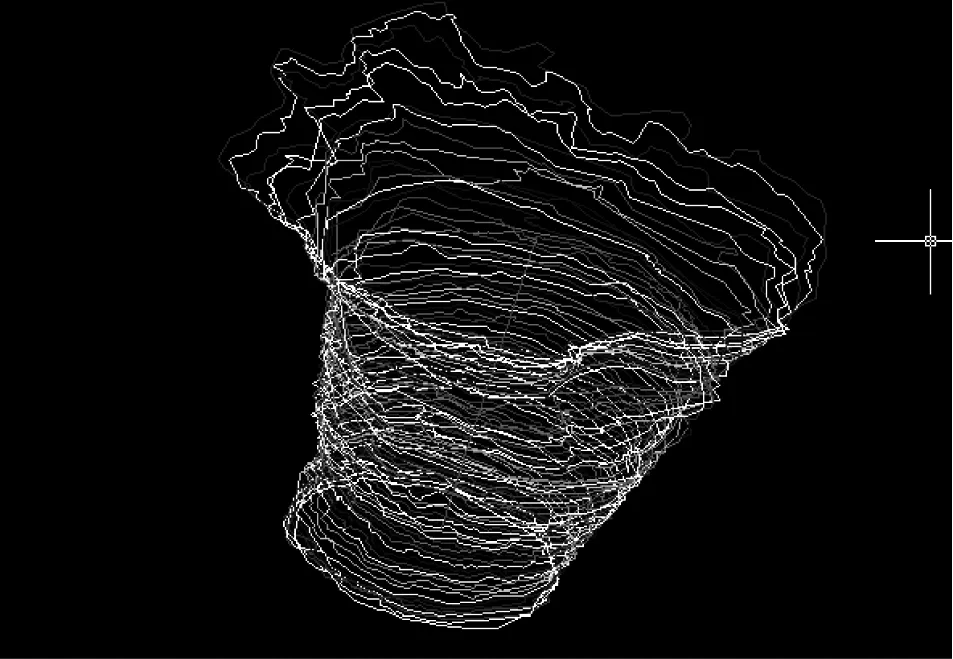
圖6 巖塞進水口斷面圖
4.4 精度評定
對巖塞口地形圖成果進行了精度評定,評定方法采用外業散點法施測,選取的檢測點均勻分布、隨機選取明顯地物點。地形圖測量成果選取40個水下高程點作為檢測點,檢測結果見表2,從評定結果可看出高程中誤差為0.08m。檢測結果滿足規范要求。
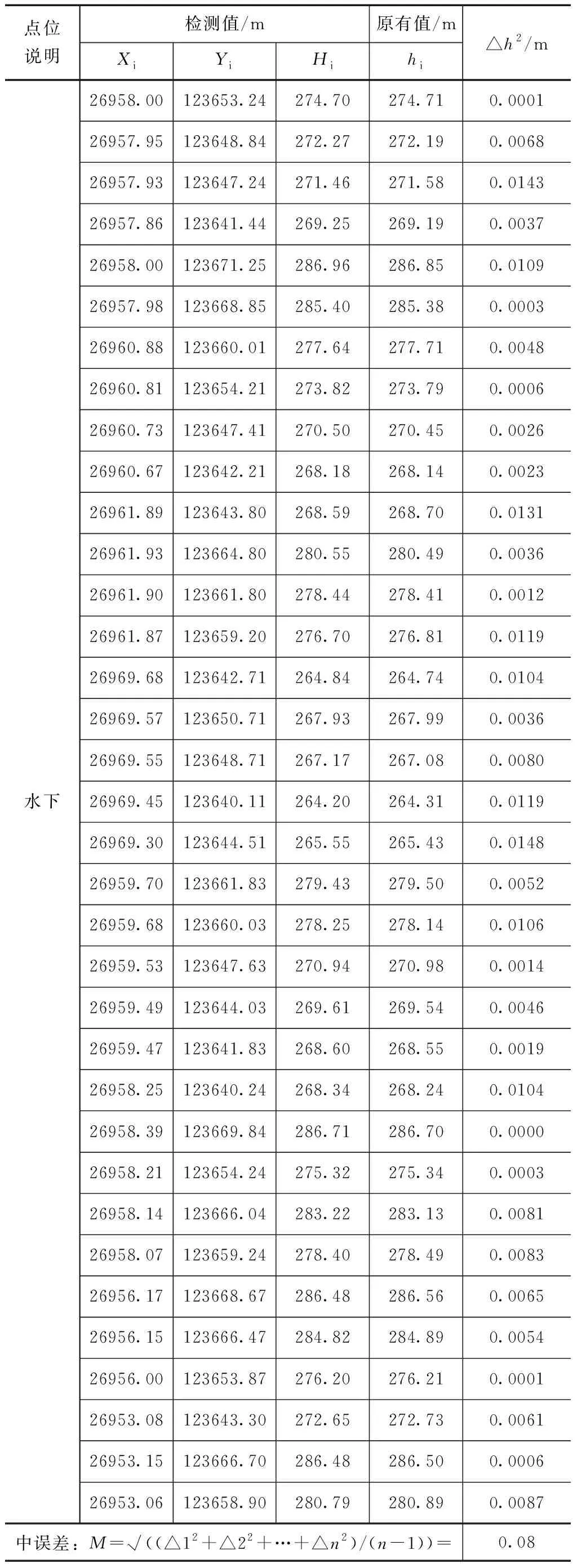
表2 精度評定表
5 結論
(1)要獲得符合精度要求的水深數據,需要對多波束進行安裝校準分析,建議平坦區域同一條測線,以3節航速相反航向分別測量一次,而特征地形(斜坡或暗礁)上同一條測線,以3節航速相反航向各測量一次。
(2)為了提高水下測量點的精度,針對水深小于50m,測量范圍較小的區域,建議可建立水下高程控制網,高程控制點應均勻分布,并在條帶拼接區域和數據融合區域進行加密。
(3)為提高測圖的精度,建議采用中位參數的多元函數濾差法最大程度的對區域的特征點進行提取,并可提高數據拼接、融合后的匹配異常值的檢測效率和精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
