一種基于體感檢測的溫室智能分揀移動平臺的設計
2021-07-14 08:42:02曾雯蓮肖茂華
湖北農機化 2021年12期
曾雯蓮 許 鵬 肖茂華
(1.南京農業大學 工學院,江蘇 南京 210031;2.東臺市金津果業有限公司,江蘇 鹽城 224200)
隨著我國人口紅利的消失,人工成本的不斷上漲,傳統的人工分揀方式越來越不適用,且人工分揀受操作人員主觀因素的影響較大,檢測精度和檢測質量都無法保證穩定,難以實現標準化的管控。市場上絕大多數水果分揀工作都在擁有流水化自動化的大型水果分選機的工廠內完成,但對于溫室來說,大棚種植區域小,空間有限,無法實現大規模的機器采摘與大型農產品分級設備的安裝,水果產后處理能力不足。
1 溫室水果分揀問題分析
國內目前大多數地區主要采用人工分揀的方式對水果進行分級,但隨著農業機械現代化的發展以及人們對農產品質量要求的提高,這種分揀方式的劣勢越發凸顯。隨著國家的經濟、科技的快速發展以及農業產業結構轉型和優化,設施農業在農業領域的應用越來越廣泛,其中,溫室大棚種植已成為現代農業應用中不可或缺的一部分,但我國設施農業目前仍存在土地利用率低、盲目引進溫室、運營管理費用高、勞動社產率低等諸多問題。
我國市場上現有的水果分揀設備主要包括滾筒篩孔式水果分揀機和輥帶式水果分揀機2種。缺點是這種分揀技術在分揀過程中水果在分揀機上受到水果相互之間以及水果與設備之間摩擦力的時間長,水果的外部品質比較容易被破壞,而且當水果的果形不規則的時候,分揀的結果則會存在較大偏差,且此類分揀機較大,不適于大多數溫室大棚。因此,研發一款基于體感檢測的溫室智能分揀移動平臺具有重要意義。平臺在大棚內進行分揀作業時,既保證了工作效率,也保證了穩定的檢測精度和檢測質量。
2 分揀移動平臺的整體設計方案
為適應大棚空間上的局限性和特殊性并且保證平臺工作效果,對整體裝置進行優化設計。平臺由動力部分、傳動部分、控制部分、執行部分和機械部分等5個部分組成。
本作品由重量較輕、行走效率高效且使用和維護方便的四輪結構及分揀裝置組成。動力部分由電池和電機組成,采用蓄電池可在一定時間內為平臺供電而避免作業時插電工作帶來的麻煩,控制部分以STM32為核心控制器,驅動及執行部分以步進電機、UWB模塊、直流電機、舵機及等裝置組成,平臺可實現對采摘后的水果實時分揀,其中分揀機構結合3D打印技術,極大程度上保證水果在分揀過程中不受損害,使溫室分揀操作更精簡化、高效化。機械部分主要包括了平臺底板、四輪機構和傳送帶。
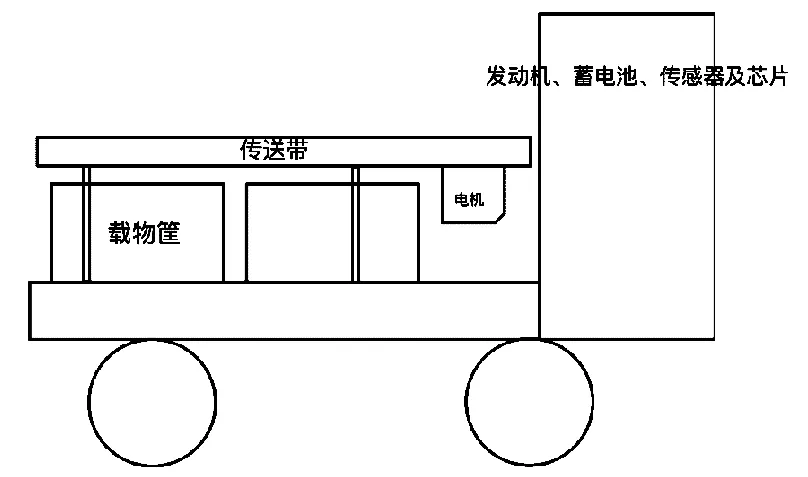
圖1 分揀移動平臺示意圖
3 基于ANSYS的靜力學分析
3.1 建立有限元模型
溫室智能分揀移動平臺的整機結構較為簡單,在實際問溫室環境中,能否以較高的完成度和精確性來完成分揀工作十分重要,因此整個平臺最易受影響的部位就是履帶架。在工作過程中履帶架作為最主要的受力部件,有必要對其進行有限元分析。利用CREO建立履帶及其履帶架的三維模型,并導入到ANSYS軟件中。
設置單元類型為正六面體20節點單元solid186,履帶架架材料為鋁合金,彈性模量為E=70 GPa,泊松比μ=0.3,密度ρ=2.72×103 kg/m3;利用系統對模型劃分網格,網格大小為10 mm,履帶架有限元網格模型如圖2所示。
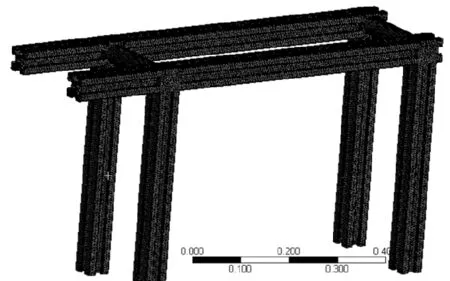
圖2 分揀移動平臺有限元網格示意圖
3.2 履帶架的靜態分析
在平臺底部4個截面處建立固定約束,在履帶的帶輪支撐柱上添加面均布載荷q,其值為150 N,進行靜力學分析,其如圖3和圖4所示,履帶架架整體受力變化不大,應力最大處的應力值僅為0.19777 MPa,小于材料的許用應力值,變形最大處為2.2928×10-4mm,變形量極小,所以整體結構設計完全符合要求。

圖3 靜應力分析結果
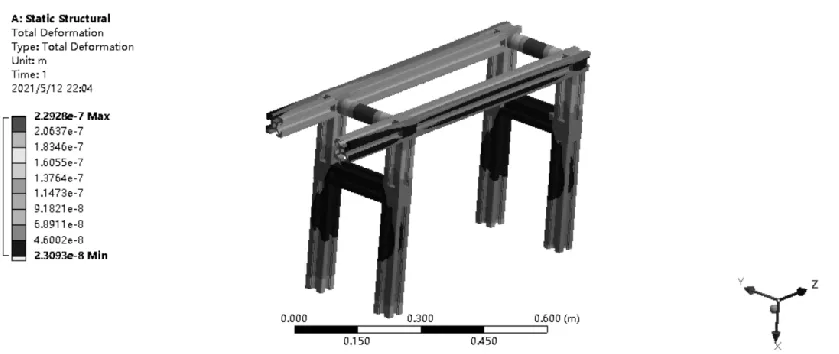
圖4 應變云圖
4 結語
針對溫室大棚的實際環境情況,設計出一種基于體感檢測的溫室智能分揀移動平臺,以分揀移動平臺的履帶架為重點,建立其三維實體模型并進行有限元分析,結果表明:履帶支架受力而產生的應變以及履帶架所受的應力均較小,證明該分揀移動平臺設計方案是可行的。文中采用的分析方法有效科學,為節省成本,縮短機械設計的周期奠定了理論基礎,在實踐應用中有很重要的借鑒意義,對溫室大棚農業的智能化、人性化以及高效化發展具有推進性作用。該分揀移動平臺的研究設計對設施農業機械化有很重要的意義。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
海峽科技與產業(2016年3期)2016-05-17 04:32:12
機械工程師(2015年10期)2015-02-02 01:14:03