基于ZigBee通信的輔助駕駛系統設計
2021-07-09 03:07:16王小龍孫付春曹文繼
成都大學學報(自然科學版) 2021年2期
王小龍,孫付春,曹文繼
(成都大學 機械工程學院,四川 成都 610106)
0 引 言
汽車輔助駕駛系統的設計與實現旨在解決汽車的交通安全問題,并提高道路的通行效率.通常,汽車輔助駕駛系統的環境感知模塊常用到視覺、雷達、激光和慣性導航等傳感器,并通過融合技術對數據進行處理.實際應用發現,上述單一傳感器或不同類型傳感器的融合計算存在系統誤差,且受環境影響,導致系統誤警率和漏警率較高,不能夠及時準確提供預警信息[1].研究表明,將無線傳感網絡技術應用于汽車輔助駕駛系統中,可有效提升車輛行駛過程中信息交互能力[2].ZigBee通信作為一種新型無線傳感網絡技術,具有成本低、功率小與工作可靠等特點逐漸在汽車智能交通領域應用發展起來[3].
汽車輔助駕駛系統對數據的傳輸效率和可靠性要求較高,利用ZigBee通信的星型拓撲結構能夠更加有效建立車際間的通信,數據傳輸可以實現多點對多點,不再以中繼點作為數據交互的管理單元,從而顯著提升車際之間的數據交互范圍及效率.基于此,本研究基于ZigBee通信設計了一種汽車輔助駕駛系統,本系統利用ZigBee通信的星型拓撲結構,快速搭建車際聯系,以實現車與車之間的行車數據交互,可實時對汽車周圍的場景進行采集分析并及時做出相應的預警提示.
1 系統設計
1.1 系統整體設計
本研究的汽車輔助駕駛系統的設計主要基于以下技術要求進行,即實現車際通信(vehicle to vehicle,V2V)、數據交互、狀態分析、及時預警及遠程監控等主要功能.系統的原理架構設計如圖1所示.
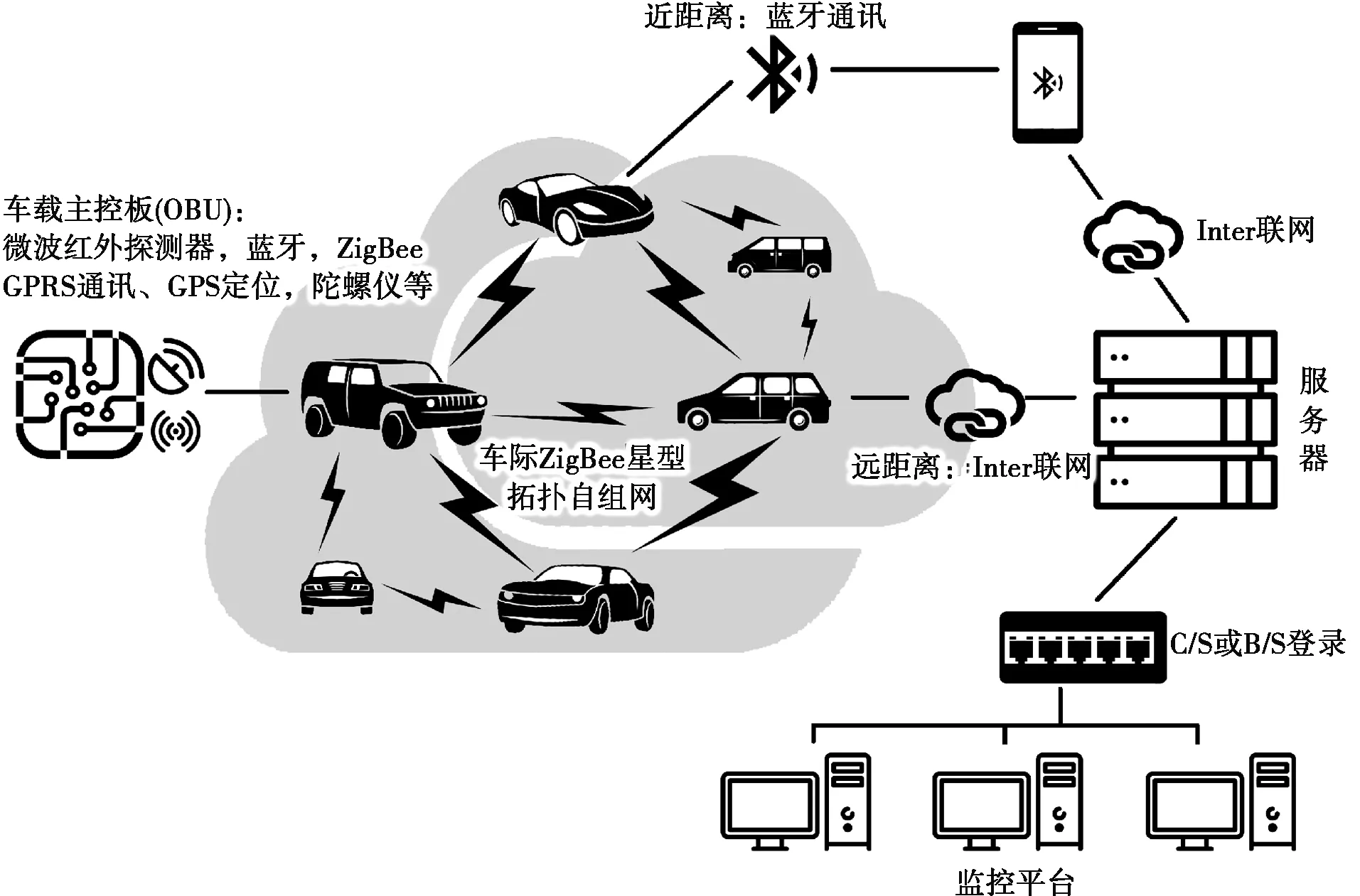
圖1 汽車輔助駕駛系統設計方案
本汽車輔助駕駛系統依據功能和狀態的不同進行了相應的模塊設計,主要包括車載信息采集系統、自車狀態采集系統、無線通信系統、遠程數據總控系統及移動監控系統等.其中:車載信息采集系統主要進行車輛定位與車內環境參數的采集;自車狀態采集系統主要對車輛行駛狀態中的速度、加速度、航向角以及行車所處環境狀態等進行采集;無線通信系統進行車際組網,實現行車數據交互;遠程數據總控系統完成多車信息的接收、分析和監控;移動監控系統實現移動設備與系統進行人機交互,獲取系統信息以及對預警信息的移動端提示.
1.2 車載控制系統設計
作為輔助駕駛系統的基礎交互控制單元,車載控制系統需要將車載信息采集系統、自車狀態采集系統與無線通信系統集成一體,同時還需要實現對遠程數據總控系統與移動監控系統數據的發送和接收[4].因此,該部分是輔助駕駛系統在軟硬件設計方面的關鍵點,其模塊設計如圖2所示.
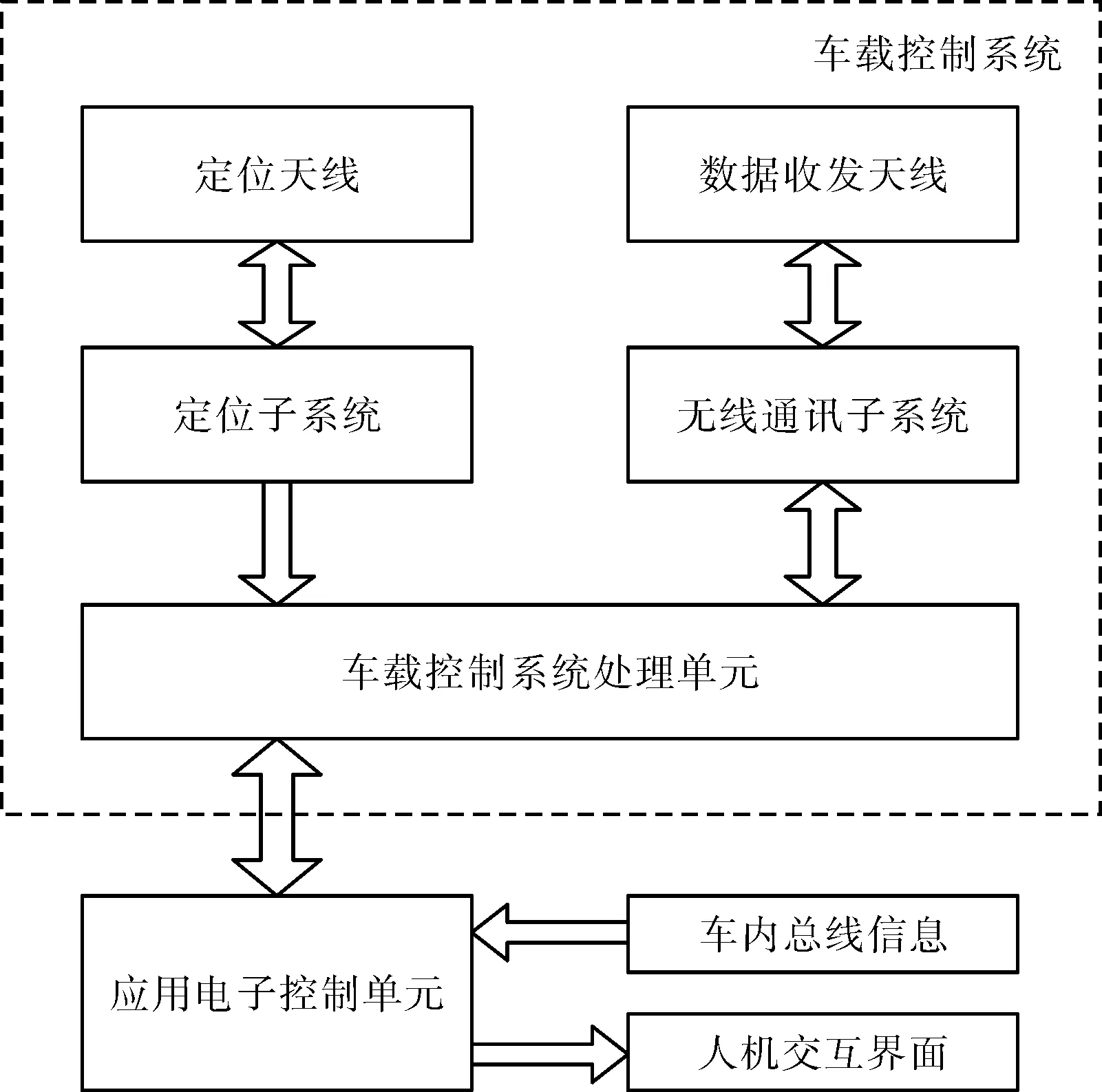
圖2 車載控制系統示意圖
車載控制系統各個硬件單元分為:無線通信子系統、定位子系統、車載設備處理單元及數據收發天線等部分.無線通信子系統主要負責接收和發送信號,一個車載設備里可以裝配一個或者多個無線電通信子系統;定位子系統可以通過車速信號、慣性測量單元與差分定位系統等方式來實現增強定位技術,該子系統中集成了全球導航衛星系統(global navigation satellite system,GNSS)接收器,以實現對車輛的位置、方向、速度和時間等信息的采集;車載設備處理單元是車載控制系統的主要控制單元,負責生成需要發送的自車信號,并且對接收的來車信號進行處理分析;數據收發天線則負責各類控制信號的接收與發送.
車載控制系統可通過接口與應用電子控制單元進行數據交互,并通過人機交互界面(driver-vehicle interface,DVI)來實現包括圖像、聲音及振動等方式對駕駛員的輔助駕駛提醒.在某些實際場合,應用電子控制單元和車載設備處理單元可在一個物理設備中實現.
1.2.1 車載控制系統算法設計
車載控制系統的控制算法設計主要通過ZigBee通信交互獲取自車與交互車之間的距離、速度等行車數據,并各自計算與交互車的安全距離是否足夠,以及在當前狀態下的安全制動距離及制動時間.如果存在行駛方向交叉,且制動安全距離不足時,將觸發報警機制.另外,車載控制系統各自車狀態傳感器也將檢測自車狀態,當某個傳感器監測到數據異常時也將觸發自車報警機制.
ZigBee通信數據中,每幀數據將打包自車當前行車數據,發送至交互車輛,交互車輛接收數據后將進一步分析來車數據,并判斷是否觸發預警,再打包自車數據反饋發送.在一次數據交互過程中,會出現5個距離變化,具體如表1所示.
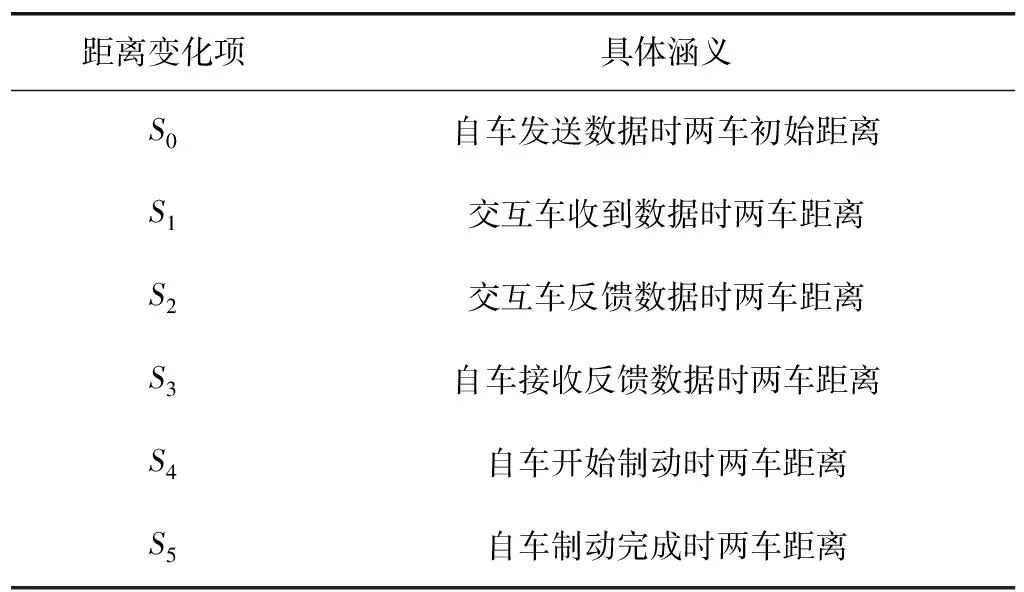
表1 通信過程中的距離變化
由表1可以分析出車輛行駛距離的變化,
∑Si=Sn-1-Sn
(1)
式中,Sn-1為上一階段兩車相距距離;Sn為本階段各車相距距離;Si為本階段各車行駛距離.
由于各個階段車輛行駛距離主要取決于各個階段數據傳遞或數據處理所占據的時間,而ZigBee通信使用無線電波,其在數據交互距離內,可以近似忽略兩車數據傳輸的時間.而數據處理周期由控制程序設計為20 ms/次,以兩車均保持120 km/h速度進行計算,每周期內兩車總共可行駛0.67 m,可見單周期數據處理時兩車距離變化對安全預警制動距離的影響十分微小.因此,本控制算法的關鍵在于分別采集兩車之間的定位信息,通過轉換確定兩車距離及行駛速度,進行安全距離計算,同時檢測自車安全狀態,當交互車與自車的行駛存在路線交叉且安全距離過小時,將觸發預警機制.
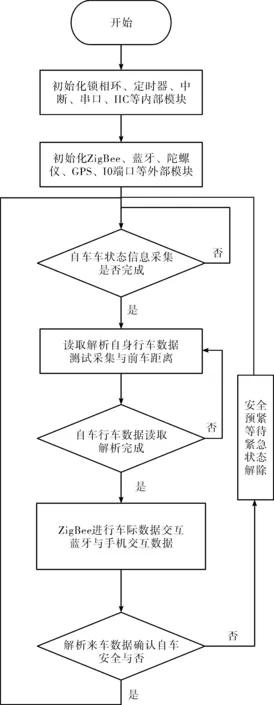
此外,車載控制系統是本汽車輔助駕駛系統的主要執行單元,其控制邏輯關系到系統的整體效率.車載控制系統的主要控制邏輯流程如圖3所示.車載控制系統的工作處于循環狀態,以保證數據的順序性和結構性.
(a)
1.2.2 車載控制系統硬件設計
本研究的車載控制系統的硬件設計結構方案如圖4所示.
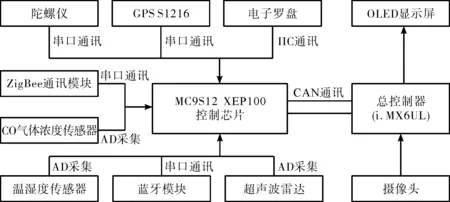
圖4 車載控制系統硬件設計結構圖
車載控制系統硬件設計結構方案中,中央處理芯片采用飛思卡爾公司的MC9S12XS128型芯片,其采集各傳感器等底層設備測量信號,并通過串口通信方式傳遞給嵌入式控制器.嵌入式控制器通過應用軟件讀取數據,并在人機交互界面上實時顯示相關數據和預警提示.車載控制系統中,ZigBee通信模塊、陀螺儀、藍牙模塊、GPS均采用串口通信與控制芯片進行通信.ZigBee通信模塊負責建立車與車之間的通信,將自車的數據發送給周圍車輛,同時接收周圍車輛的數據;GPS負責獲取位置信息,結合電子羅盤明確自車的行駛方向,其中電子羅盤和車載控制系統控制芯片采用IIC方式進行通信;陀螺儀負責將車輛的姿態信息進行采集解算,預防自車發生嚴重側傾或側滑,并實時采集自車各向加速度信息;藍牙模塊負責將自車行駛數據發送到手機終端APP進行接收處理、分析顯示以及預警提示,方便用戶通過手機實時查看自車運行狀況和周圍行駛車輛的狀況;溫濕度傳感器負責采集車內的溫濕度,CO傳感器負責采集車內的空氣質量,保障駕駛人員和乘客擁有一個舒適的駕乘環境;超聲波傳感器采集自車與前車的距離,通過控制芯片計算短距離下安全車距界限并做出預警[5].控制芯片將各傳感器采集到的數據進行處理綜合并通過ZigBee通信與周圍車輛進行數據交互,總控制器則負責進行數據可視化顯示,并根據狀態安全與否發出聲光預警.同時,總控制器還可以加裝攝像頭,實現對行駛盲區的顯示.車載控制系統的硬件設計原理如圖5所示.
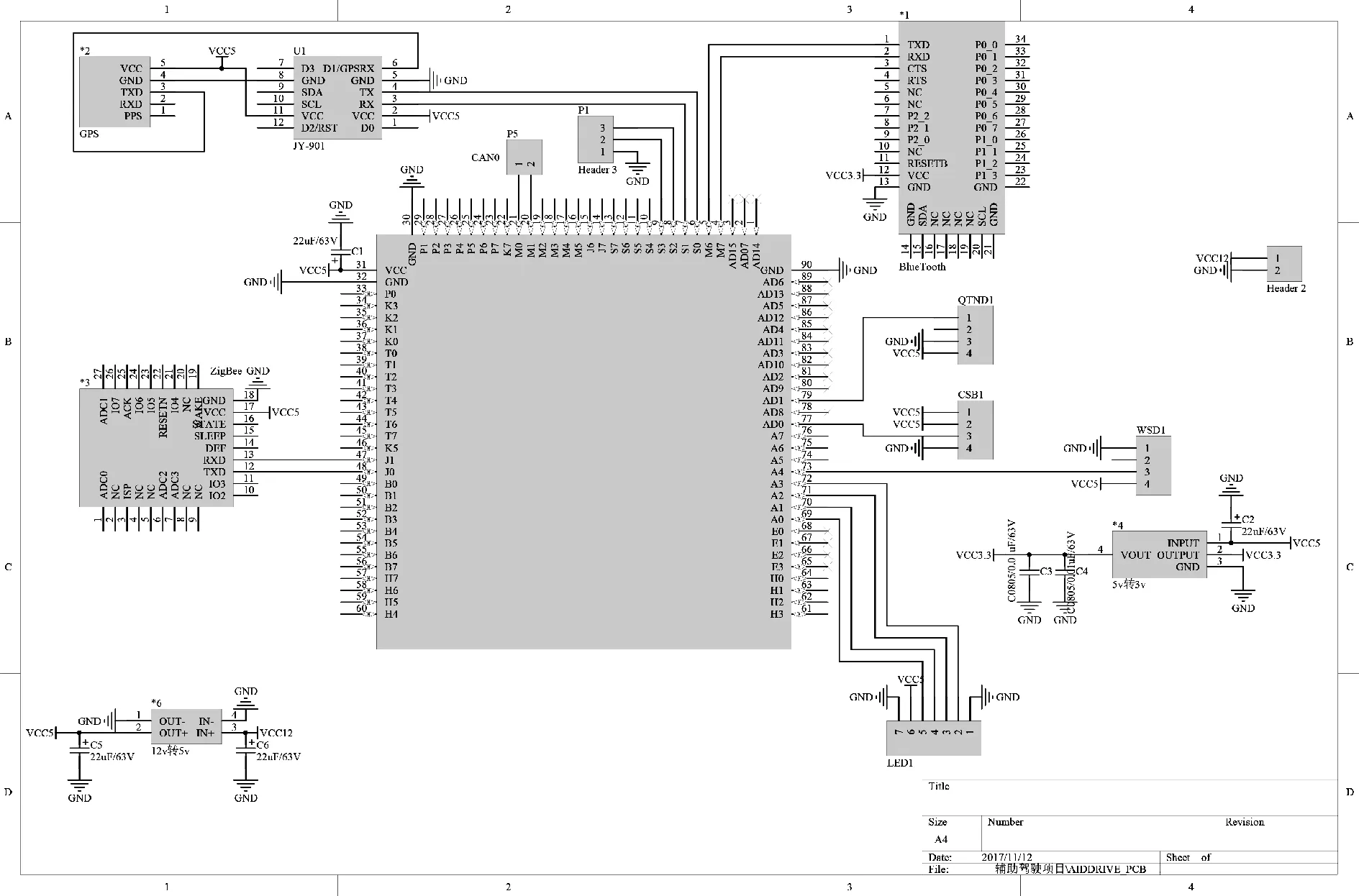
圖5 車載控制系統硬件設計原理圖
2 系統交互與測試
針對本汽車輔助駕駛系統的功能為有效對行車數據及車輛交互數據進行監測和預警,本研究對系統的交互軟件進行了具體設計,包括主交互軟件和手機監視軟件.主交互軟件通過串口通信與車載控制系統進行數據通信,同時能夠將自車與來車狀態進行數據可視化顯示,對可能出現的緊急狀態進行圖像文字及聲音預緊提示.手機監視軟件主要通過藍牙通信與車載控制系統交互數據,能夠通過手機的振動或語音提醒駕乘人員提前進行預警操作,確保駕駛安全,其軟件交互界面如圖6所示.
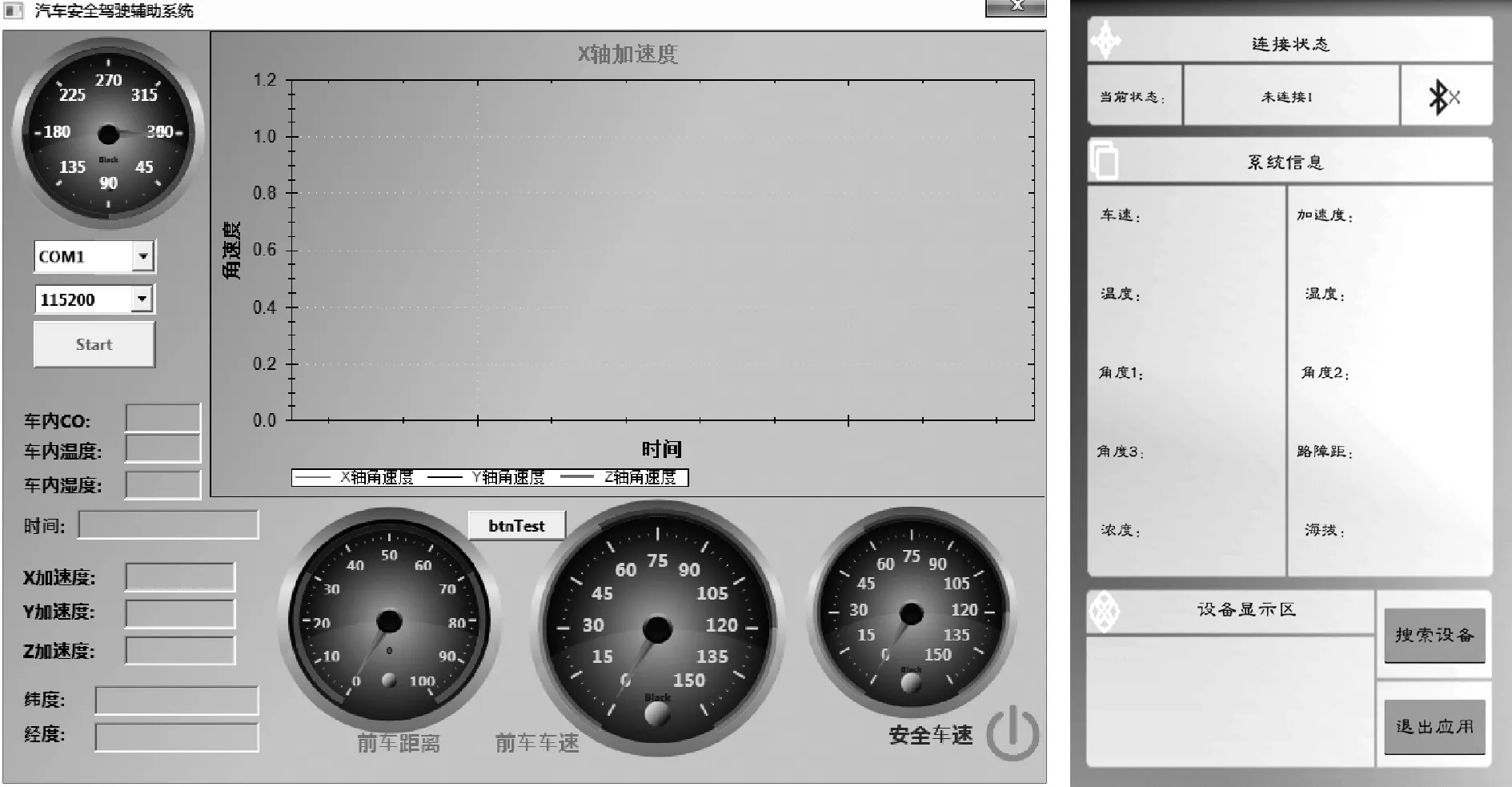
圖6 主交互程序及手機藍牙監視軟件界面
為驗證本研究設計的輔助駕駛系統是否能夠滿足具體的輔助駕駛性能要求,特進行了實車測試試驗.試驗分為,同向超車、相對離去、相向制動、路口交匯4種類型[6-7].
(1)同向超車測試.甲、乙兩車同向運行,甲車初始落后乙車376 m,甲、乙兩車同時向前行進,甲車由于速度高于乙車,在14.4 s左右追平乙車并繼續向前行駛,最終通過加速超越乙車265.4 m后兩車停止運動,在25.8 s試驗時間內,甲車從落后376 m到超越265.4 m,結果如圖7所示.試驗表明,系統能夠有效傳輸兩行車數據,實現狀態提示.
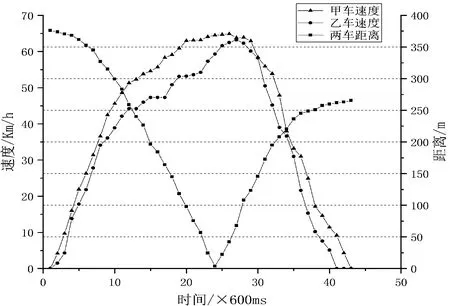
圖7 同向超車試驗
(2)相對離去測試.甲、乙兩車背對處于同一位置(初始兩車相距2.5 m),測試開始后分別朝相對方向直線駕駛,甲車整個過程中迅速駕駛至57.8 km/h峰值速度后減速停車,停止一段時間后又進行兩次短暫起停動作,而乙車則加速至42.1 km/h峰值速度后緩慢減速行進,在48.6 s時兩車停止運動,此時兩者相距490.3 m,結果如圖8所示.試驗表明,在近500 m的離去距離范圍內,系統能夠保證良好的通信效率.

圖8 相對離去試驗
(3)相向制動測試.甲、乙兩車從相距277.4 m處開始相向行駛,兩車分別加速至50 km/h后迅速進行制動,其中甲車加速至9.6 s時達到峰值速度60.5 km/h后迅速進行制動,而乙車則在9 s時達到峰值速度56.2 km/h后迅速制動.在13.2 s時兩車均停止移動,此時兩車相距43.4 m,結果如圖9所示.試驗表明,系統能夠保證在行車出現緊急狀況時為車輛提供必要的緊急制動預警,且能夠保障行車之間的安全制動時間及距離.
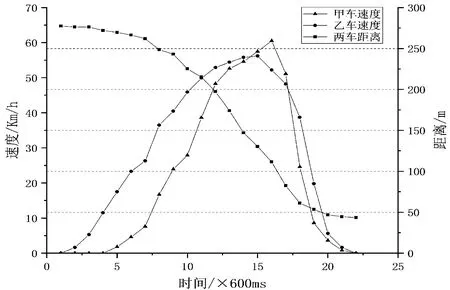
圖9 相向制動試驗
(4)路口交匯測試.甲、乙兩車分別沿交叉路線行駛,初始兩車直線距離120.9 m,兩車提速至40 km/h左右交叉通行,在10.8 s時兩車相距最近為46.2 m,此后兩車分別向前減速行駛,距離逐步增加,最終兩車停止時相距61.9 m,結果如圖10所示.試驗表明,系統在十字路口等路況下能夠保持良好的通信能力.
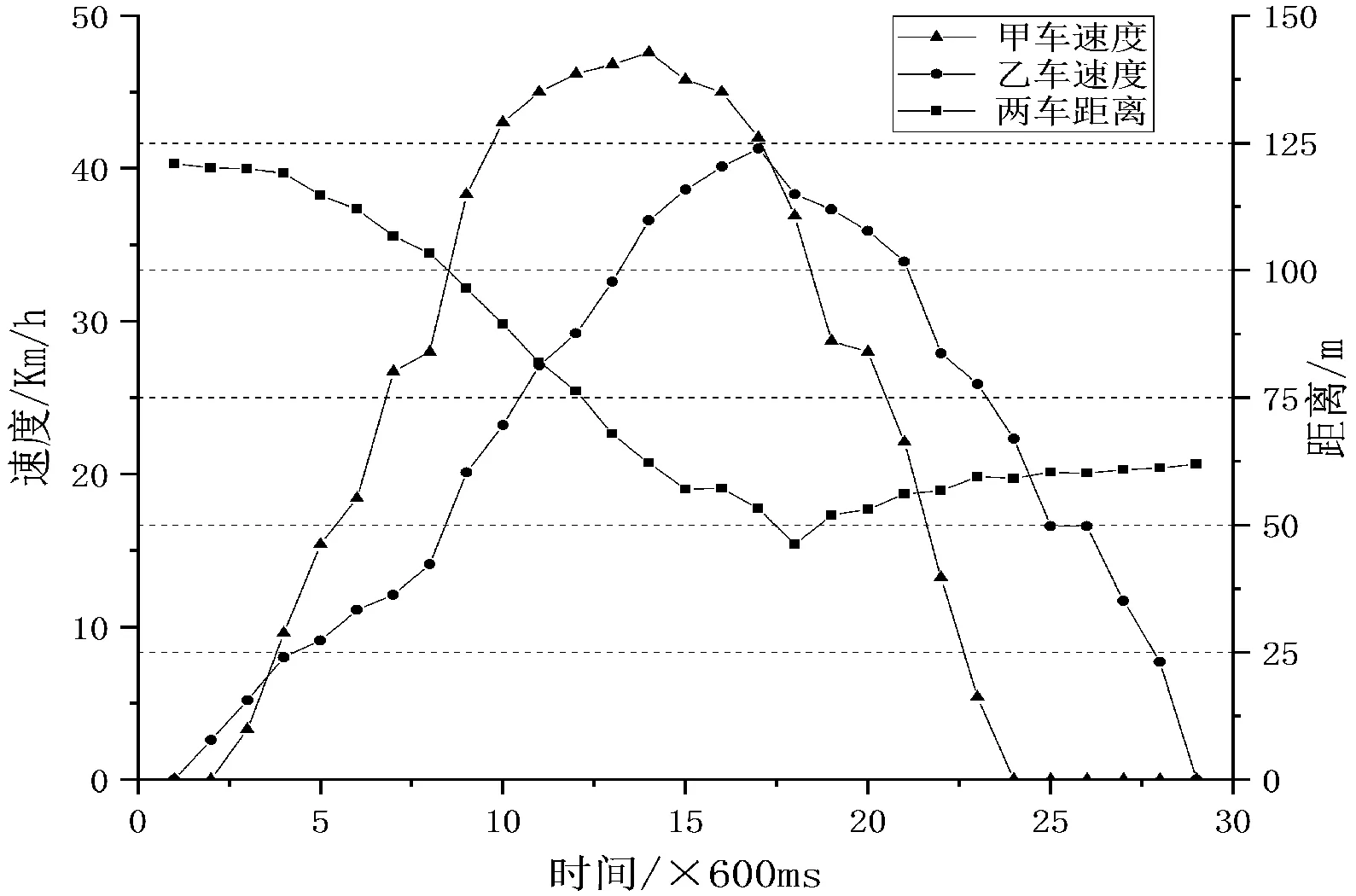
圖10 路口交匯試驗
通過上述試驗測試,并對試驗數據進行詳細分析可知,各項測試中,甲、乙兩車最高速度都達到50 km/h左右,兩車在4種模擬路況類型中均能保障良好的通信能力,并對車際之間的行車數據進行精確傳輸.試驗驗證了基于ZigBee通信的輔助駕駛系統的數據收發性能,完全能夠保證在一定距離范圍內車際之間良好的通信效率.
3 結 語
本研究提出了一種基于ZigBee通信的汽車輔助駕駛系統,并對系統的整體框架和具體的車載控制單元進行了軟硬件設計.本系統的功能包括:開啟手機輔助駕駛系統App,藍牙與輔助駕駛系統連接后,實現實時監控車輛的室內溫度、二氧化碳濃度等環境信息;利用ZigBee通信組網,在信號可達距離內實現了車輛之間的信息傳遞和共享.通過實車試驗驗證,本系統在一定距離范圍內能夠有效保證車與車之間的實時數據交互,保證車輛之間的主動預警,能夠為車輛的輔助駕駛及主動安全性能提升起到一定的作用.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17