智能自動化技術在汽車工程中的應用
2021-07-08 10:58:42蘇玉來田峰魏幫頂
時代汽車 2021年9期
蘇玉來 田峰 魏幫頂

摘 要:作為主要交通工具,汽車的安全和舒適性向來受到重視,為滿足消費者的相關要求,智能自動化技術近年來開始大量應用于汽車工程領域。基于此,本文將圍繞現代智能化技術要點進行研究,簡單探討其在汽車工程中的應用,并結合可拓切換控制方法深入探討智能自動化技術在智能駕駛汽車時的應用價值,結合具體的實驗能夠確定,可拓切換控制方法能夠較好保證汽車的工況適應性和控制精度。
關鍵詞:自動化 汽車工程
Application of Intelligent Automation Technology in Automobile Engineering
Su Yulai,Tian Feng,Wei Bangding
Abstract:As the main means of transportation, the safety and comfort of automobiles have always been valued. In order to meet the relevant requirements of consumers, intelligent automation technology has begun to be widely used in the field of automotive engineering in recent years. Based on this, this article will focus on the main points of modern intelligent technology, briefly discuss its application in automotive engineering, and combine the extension switch control method to deeply explore the application value of intelligent automation technology in smart driving cars, combined with specific experiments. It is confirmed that the extension switching control method can better ensure the adaptability and control accuracy of the automobile.
Key words:automation, automotive engineering
1 引言
在智能自動化技術支持下,汽車制造的質量和速度不斷提升,這是由于智能自動化技術在汽車工程領域具備效益高、精準度高等優勢,依托該技術開展異常情況檢測、高有效性控制、管理系統完善,汽車工程領域的發展即可獲得更為有力支持。
2 現代智能化技術要點
2.1 智能化技術在汽車后視鏡技術中的應用
作為車廂外的部件,汽車后視鏡很容易出現灰塵污染或被碰撞,因此近年來后視鏡自動折疊功能正逐漸成為家用汽車的標配,后視鏡能夠在駐車后自動折疊,剮蹭、污染等問題能夠有效規避,這便屬于現代智能化技術的典型應用。對于視角較小的后視鏡來說,能否對后方道路情況進行全面反映直接決定后視鏡的價值,行車安全也會直接受到影響,而通過自動改變后視鏡位置,智能自動化技術的應用能夠迅速提供最佳后視鏡位置[1]。
2.2 智能化技術在車內空氣監測中的應用
隨著我國民眾的生活水平不斷提升,人們對健康的重視程度也在不斷提高。半封閉狀態結構汽車車廂空氣質量問題開始受到廣泛關注,車內空氣質量差或氧氣不足屬于汽車工程必須解決的問題。汽車空調系統分為內循環和外循環,這一過程中一氧化碳可能隨外循環進入車廂導致車內人員中毒,內循環則可能導致車內缺氧,為規避這類問題,智能化技術在車內空氣監測中的應用極為關鍵,以此實時監測車內有毒氣體含量和氧氣含量,并實時顯示監測結果,輔以自動調節控制,即可避免車內人員缺氧或中毒[2]。
1.3智能化技術在汽車剎車系統中的應用
作為汽車最重要的系統之一,剎車系統直接關系著車輛使用安全及周邊行人安全。在智能化技術支持下,車輛可實現自身傾斜角度的自動獲取,以此判斷傾斜角度,駕駛員踩下剎車時剎車系統可基于車輛傾斜情況自動啟動,汽車剎車系統的安全性能夠大幅提升。此外,因操作不熟練誤將油門當做剎車而引發的交通事故在我國較為常見,而在智能化技術支持下,通過對車輛安全距離內障礙物的雷達感應,即可實現自動化的剎車系統啟動,行車事故將有效規避,人員安全也能夠更好得到保障,智能化自動技術在汽車工作領域的應用價值可見一斑[3]。
3 智能化技術應用效果評價
為直觀展示智能化技術在汽車工程領域的應用價值,本節將圍繞智能車輛的車道保持控制開展研究,具體將圍繞實驗設計、實驗得分、結果評價三方面開展深入探討,汽車工程領域智能化技術的應用效果最終得到了直觀展現。
3.1 實驗設計
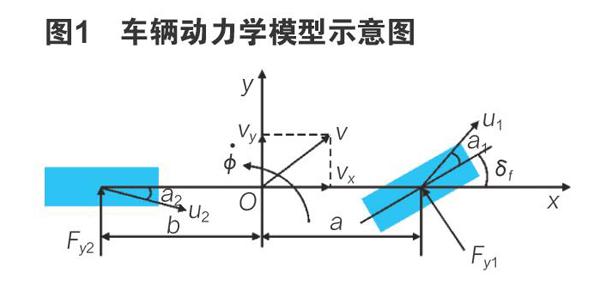
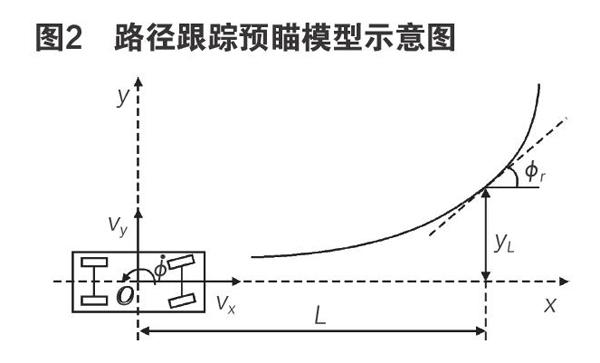
在汽車工程領域的智能化自動技術應用研究中,智能車輛的車道保持控制屬于研究熱點,該控制本質上屬于車-路閉環控制,系統同時考慮車輛和道路的相對位置狀態及車輛本身狀態,結合國內外相關研究,本文選擇二自由度車輛動力學模型,并由此開展了路徑跟蹤預瞄模型設計,具體如圖1和圖2所示[4]。
基于圖1和圖2,針對性設計可拓車道保持控制系統,研究采用的整車質量、質心到前軸及后軸的距離分別為1723kg、1.23m、1.47m,前輪輪胎、后輪輪胎的側偏剛度分別為66900N/rad、62700N·rad-1,汽車繞z軸的轉動慣量為4.75×103kg·m2。基于10m的預瞄距離,相應狀態空間方程矩陣為[5]:
rank(S)=rank(B,AB,A2B,…,An-1B)=n
rank(V)=rank(C,CA,CA2,…,CAn-1)T=n (1)
上式中的C為單位矩陣,V、S分別為可觀判別矩陣、可控性判別矩陣,滿足可觀測性和可控性要求。進一步設計控制器系統,具體如圖3所示。
結合圖3進行分析可以發現,該可拓控制器中的K(S)屬于可拓關聯函數,基于道路中心線的曲率值和預瞄點處橫向偏差,即可按照可拓域、經典域、非域劃分模型所處的狀態,同時提供不同控制策略,不同控制策略可基于不同區域的切換控制。圍繞下層控制器進行分析能夠發現,對處于經典域狀態的模型來說,存在較小的預瞄點處橫向位置偏差yL,同時存在偏小的車道線曲率ρ,此時可選擇PID反饋控制器。對處于可拓域狀態的模型來說,存在變大的預瞄點處橫向位置偏差yL,以及變大的車道線曲率ρ,此時的PID反饋控制器會出現響應滯后、穩態誤差大的不足,趨近不穩定的系統狀態需將前饋校正環節基于道路曲率加入,以此實現PID前饋-反饋控制,大曲率工況下車輛的快速跟蹤控制可順利完成,車輛原有車道在經過彎道時的準確保持能夠順利實現。
上層控制器設計需圍繞可拓切換控制算法和車道線檢測算法開展,以此實現模型所處狀態區域的確定,并實現道路曲率和車輛預瞄點處橫向位置偏差的獲取。選擇120fps幀率、1440×720分辨率的攝像頭,基于CAN總線將自動駕駛試驗車處理器與攝像頭連接,由此采集的數據用于MATLAB/Simulink仿真。在遠距離開展道路信息采集時,攝像頭存在置信度低和信息偏差大的問題,為提升采集信息的可信度,對攝像頭參數進行極限值約束,以此將車輛左側、右側最大測量范圍設置為-10~0m、0~10m,車輛航向偏差角、道路中心線曲率的最大范圍分別設置為-1~1rad、-0.12~0.12。對屬于直線道路的前方道路,采用直線車道線擬合方法(基于Hough變換)開展車道線檢測,對屬于彎道的前方道路,采用車道線擬合方程式進行車道線檢測,分別為:
式中的k、x、y分別為車道線斜率、車道線橫坐標、車道線縱坐標,為擬合的常數項(直線車道線),分別為車道線航向角,以及左、右車道線縱坐標。開展針對性的特征量提取、可拓集合劃分、關聯度計算,控制策略即可基于測度模式劃分。
下層控制器設計需圍繞PID反饋控制器(預瞄偏差)、PID反饋控制器(預瞄偏差)、PID前饋-反饋控制器(道路曲率)開展。
3.2 實驗得分
開展模型仿真,對直線工況和時變曲率混合工況進行驗證。直線仿真工況的初始航向偏差、車輛縱向速度、道路中心線曲率分別設置為0rad、20m/s、0,初始橫向位置偏差設置為0.2、0.6、1.0,由此開展仿真能夠確定,本文研究的車道保持系統具備較高可行性。時變曲率混合工況涉及直線道路(0~5s)、三角函數Y=4sin(0.1X)道路(5~14.4s)、支線道路(14.4~20s),車輛縱向速度設置為20m/s,由此開展仿真能夠確定,較大橫向和大曲率位置偏差區間內的偏差值有效抑制,混合道路工況下智能駕駛汽車行駛過程中的車道保持精度大幅提升。總的來說,本文研究的車道保持系統在可拓控制器支持下能夠實現車輛車道高精度控制范圍的拓展,滿意的跟蹤效果得以順利獲得,PID反饋控制、PID前饋-反饋控制在其中發揮著關鍵性作用。
3.3 結果評價
為驗證上文方法的可行性,采用智能駕駛測試平臺開展實車驗證試驗,該平臺由下執行控制單元、上位機決策系統、感知系統組成,選擇標準化雙向兩車道作為試驗測試道路,設置13km/h的車輛縱向速度。在車道保持控制器支持下,車輛能夠實現車道的精準保持,具體的使用需求得以滿足,而結合橫擺角速度和側向加速度能夠發現,該系統在車輛運動穩定性保持中也能夠發揮積極作用,能夠在±0.75m/s范圍控制側向加速度,在±3.5°/s控制橫擺角速度。
4 討論
結合研究能夠發現,智能自動化技術在汽車工程中具備較高應用價值。但在研究中能夠發現,系統在切換控制策略中存在較為顯著的抖動現象,這對車輛的舒適性和運動平順性帶來了一定影響,為保證智能自動化技術更好服務于汽車工程,筆者將圍繞相關內容開展進一步研究。
參考文獻:
[1]楊迪,黃強.自動化技術在汽車機械制造中的創新應用研究[J].時代汽車,2021(03):21-22.
[2]石宏華.電子傳感器在汽車自動化技術中的智能應用探究[J].電子測試,2020(22):139-140.
[3]龍眉.智能自動化技術在汽車工程中的應用研究[J].時代汽車,2020(15):23-24.
[4]曲家宇.智能制造在汽車車身焊接的應用[J].集成電路應用,2020,37(04):116-117.
[5]時鋒.智能自動化技術在汽車工程中的應用[J].農家參謀,2019(23):143.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(2020年4期)2020-10-27 02:45:52
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中國交通信息化(2017年4期)2017-06-06 07:21:52
作文大王·低年級(2016年4期)2016-04-18 00:24:37
能源(2015年8期)2015-05-26 09:15:56