基于不確定傳感器狀態(tài)的機載系統(tǒng)多層故障診斷方法
2021-07-07 11:30:32石健王少萍羅雪松
航空學報 2021年6期
石健,王少萍,羅雪松
1. 北京航空航天大學 自動化科學與電氣工程學院,北京 100191
2. 北京航空航天大學 寧波創(chuàng)新研究院,寧波 315800
2018—2019年的兩起波音737MAX飛機墜機事故不僅造成了346名乘客罹難的災難性后果,而且給航空巨頭波音公司帶來了極大的負面影響,造成了不可估量的損失。通過事故調查發(fā)現(xiàn):兩起事故均是由于攻角(AoA)傳感器故障導致機動特性增強系統(tǒng)(MCAS)一系列錯誤操作引起的[1-2]。由此,飛機機載傳感器的可靠性與故障診斷問題再次受到了航空界的廣泛關注。
實際上,機載傳感器故障一直是嚴重影響航空安全的關鍵問題之一。從傳感器故障原因上分析,傳感器的故障在數(shù)據(jù)獲取、信號處理和診斷決策3個階段產生,且各階段都存在硬件限制、算法局限和外部不確定環(huán)境等多種潛在故障因素[3-4]。因此,降低單一傳感器的故障率存在瓶頸。此外,傳感器誤報警故障(NFF)占到飛機飛行過程故障記錄的85%,并耗費飛機總維護成本的90%[5]。因此,在飛行過程中正確識別機載傳感器的狀態(tài),及時隔離故障傳感器并維持對機載系統(tǒng)本身的準確監(jiān)測成為保證飛行安全的一項關鍵內容。
當前在機載傳感器故障識別方面主要通過余度傳感器之間的交叉比較[6-8],以及模型自監(jiān)控[9-12]2種方式來實現(xiàn)。由于存在共因故障,余度傳感器之間的交叉比較并非總能有效隔離故障的傳感器,比如盡管波音737MAX飛機上同時安裝有2套AoA傳感器,仍無法避免傳感器的故障給檢測系統(tǒng)帶來的誤判引發(fā)事故。基于模型自監(jiān)控的有效性主要依賴于模型本身的精確性,故障識別結果容易受到噪聲等內外部因素影響。
近年來,學者研究了基于多源信息融合的故障識別方法[13-15]。文獻[16]提出了基于復合證據(jù)距離的多源信息融合故障診斷方法并將其用于航空液壓泵的故障識別中,有效提高了故障識別準確度。文獻[17]提出了一種基于多源信息融合的航空發(fā)動機故障診斷算法,該算法將發(fā)動機各種監(jiān)測信息通過不同的神經網絡診斷結果在特征層融合,然后通過D-S證據(jù)理論在決策層進行綜合,最后給出診斷結果。然而當前的基于多源信息融合的故障識別方法側重于采用局部傳感器的檢測特征。由于機載傳感器(如壓力傳感器、流量傳感器、溫度傳感器、振動傳感器等)往往受到多重極端環(huán)境條件(振動、沖擊、極限溫度等)影響其工作狀態(tài),因此單一傳感器本身的輸出結果置信度難以保證。此外,共因/共模故障也導致在局部系統(tǒng)的傳統(tǒng)冗余備份傳感器有可能同時失效,如波音737MAX案例中2套攻角傳感器就同時因為低溫而凍結。這些傳感器帶來的不確定因素均會導致故障診斷系統(tǒng)在推理過程中做出錯誤的判斷。
針對上述傳感器信息本身不確定性問題,本文采用體系化建模思路,充分利用機載系統(tǒng)中不同層級、不同區(qū)域傳感器檢測特征之間的關聯(lián)關系,通過貝葉斯網絡建立起其概率推理模型,考慮單個傳感器本身存在的不確定性,構建傳感器信息前向融合與反向校驗相結合的分層診斷決策方法,提升系統(tǒng)故障診斷的精度。
1 基于傳感器信息分層融合的故障診斷算法
根據(jù)系統(tǒng)的定義:系統(tǒng)是由相互作用相互依賴的若干組成部分結合而成的,具有特定功能的有機整體[18]。對于復雜機載系統(tǒng)來講,系統(tǒng)中各部分之間的相互作用和相互依賴關系將各組件的狀態(tài)緊密聯(lián)系在一起,即某一傳感器的檢測結果既包含了檢測點局部的信號特征,也反映了檢測點上下游區(qū)域特征。因此,通過合理構造故障診斷層級,充分利用檢測特征間的關聯(lián)關系,不僅可以擴展故障檢測的信號維度,提高系統(tǒng)故障診斷的識別粒度,而且可以通過檢測特征間的交叉校驗準確識別傳感器自身的故障,并在系統(tǒng)級的融合中對其影響加以規(guī)避。
本方法是基于貝葉斯網絡,將實際復雜系統(tǒng)根據(jù)物理架構進行分層,并逐層構建貝葉斯概率模型,最底層即為傳感器的實際檢測模型。由于本模型討論的是傳感器信息流在層級間的傳遞和融合校驗,故假設各傳感器的實測數(shù)據(jù)已經過信號處理并已提取為故障特征,各特征以狀態(tài)空間和概率的數(shù)學形式在本模型中傳遞。
1.1 傳感器檢測模型

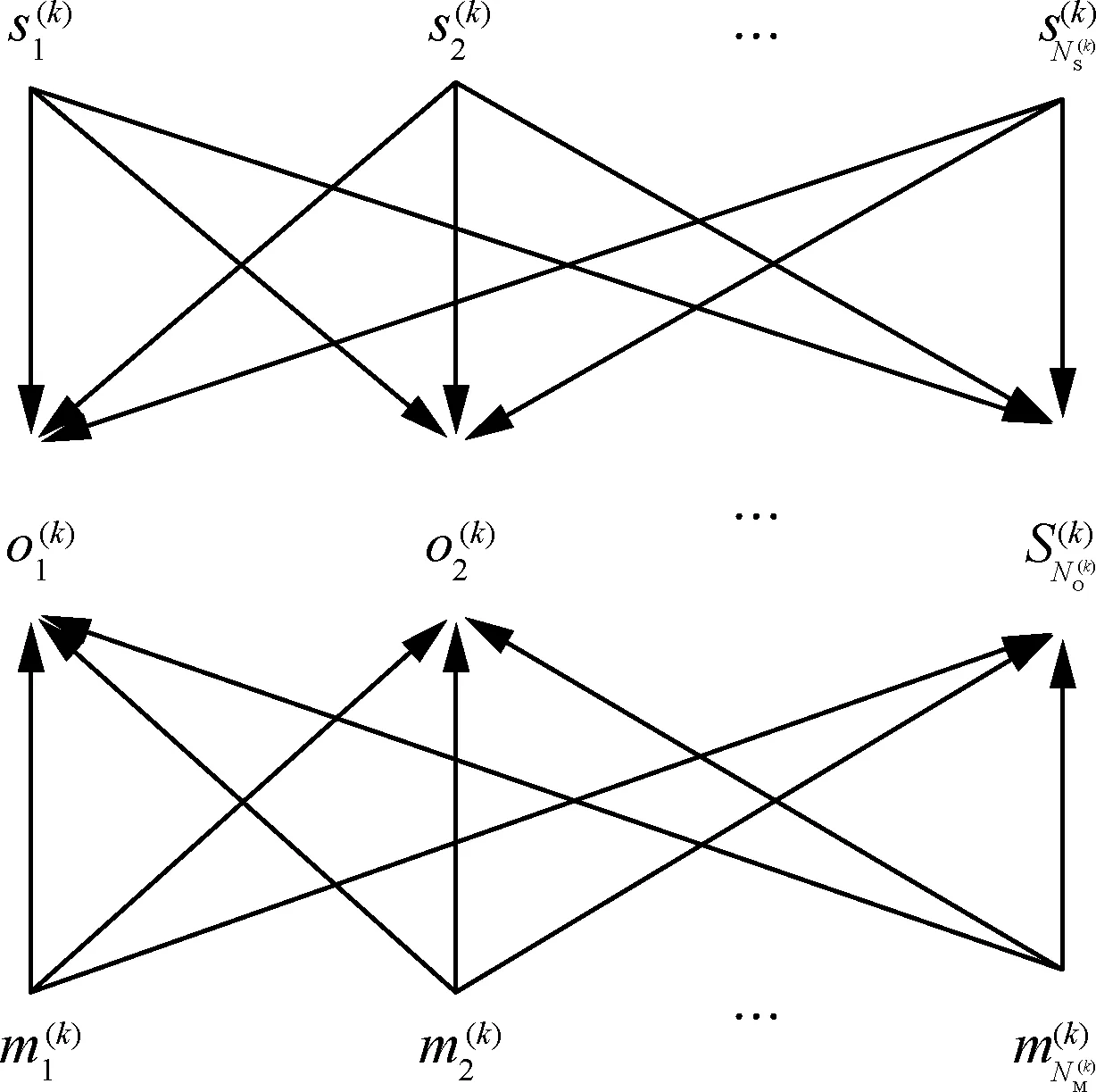
圖1 傳感器檢測模型
根據(jù)傳感器的檢測模型可知,傳感器的觀測結果同時受到LRU的實際狀態(tài)以及傳感器本身的不確定狀態(tài)共同影響。給定該傳感器檢測狀態(tài)的似然函數(shù)L(S(k),M(k)|O(k)),根據(jù)貝葉斯網絡計算公式可以得到聯(lián)合概率分布為
P(S(k),M(k),O(k))=
(1)
(2)

(3)

(4)

(5)
根據(jù)上述模型和算法,第k層單傳感器的狀態(tài)估計以及基于該傳感器的LRU狀態(tài)估計過程如圖2所示。
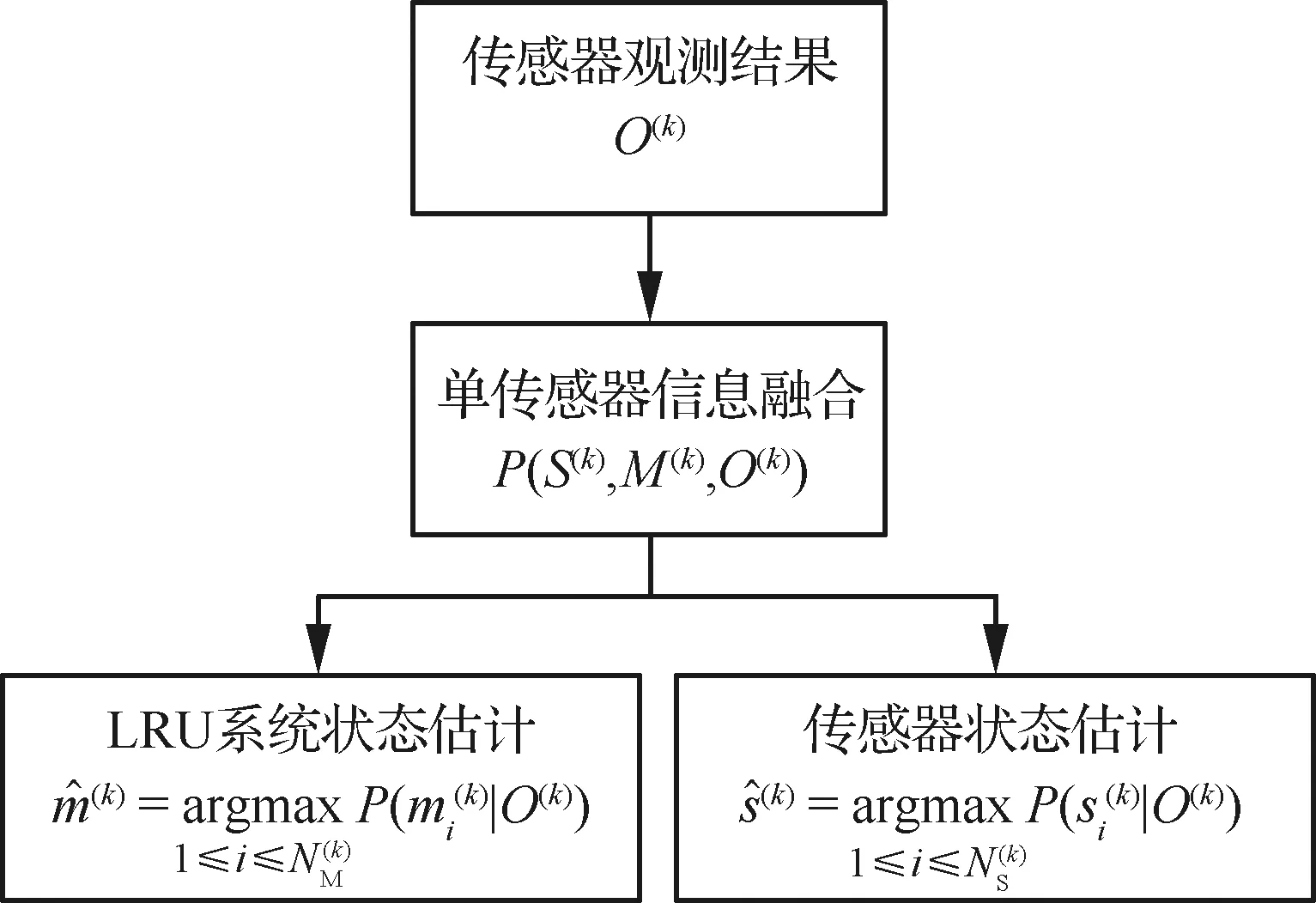
圖2 傳感器和LRU狀態(tài)估計過程

1.2 多層系統(tǒng)狀態(tài)融合模型

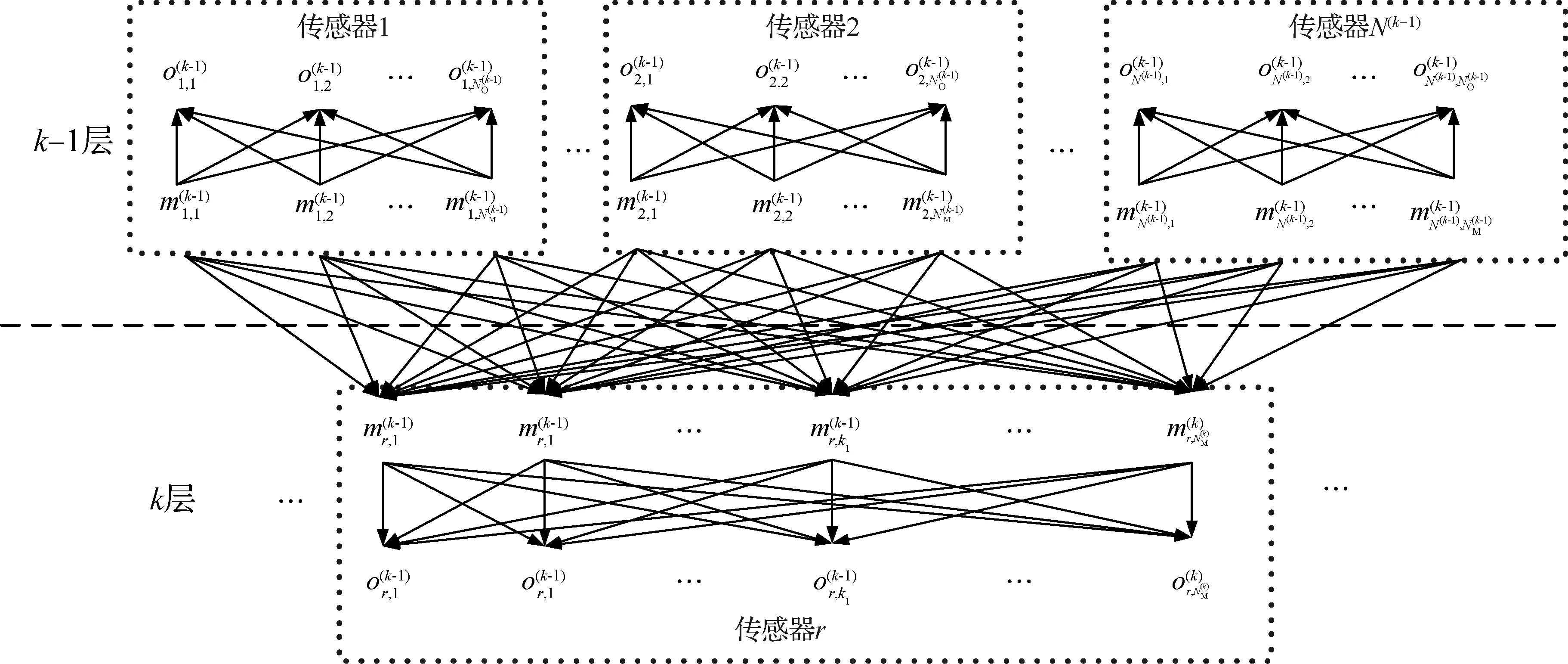
圖3 多層系統(tǒng)狀態(tài)融合模型
(6)

(7)
在式(7)的基礎上,可進一步利用貝葉斯網絡計算公式寫出多層系統(tǒng)狀態(tài)融合模型的聯(lián)合概率分布關系為
(8)

(9)

(10)

(11)

(12)
根據(jù)上述模型和算法,融合第k-1層和第k層傳感器的觀測結果,對第k層系統(tǒng)狀態(tài)的前向估計過程以及對k-1層的系統(tǒng)狀態(tài)的反向校驗過程如圖4所示。至此,已完成了系統(tǒng)狀態(tài)估計的遞推關系,該模型可以對不考慮傳感器狀態(tài)的多層故障診斷系統(tǒng)證據(jù)融合過程進行建模。
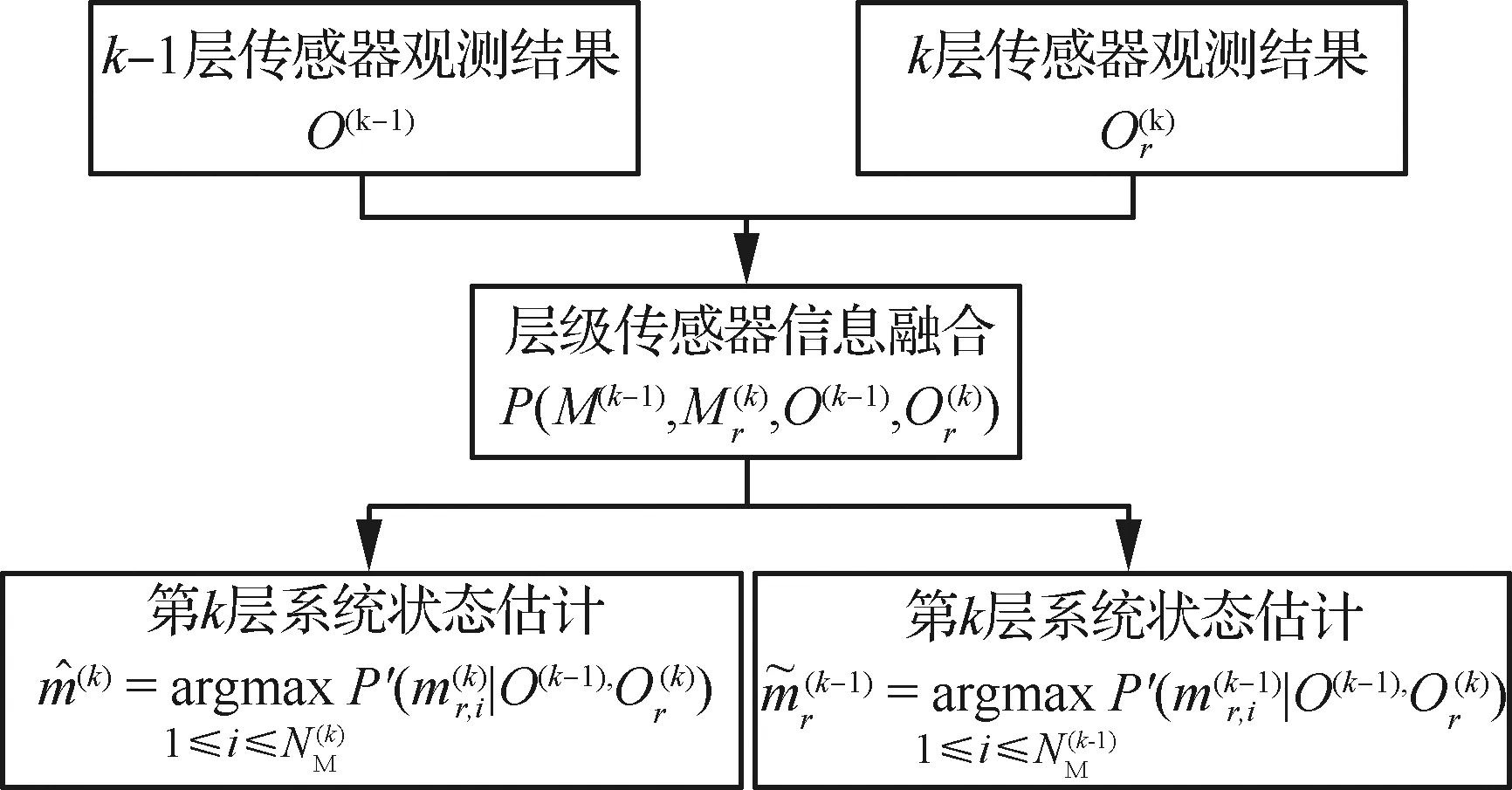
圖4 多層系統(tǒng)狀態(tài)估計過程
1.3 多層傳感器狀態(tài)融合模型
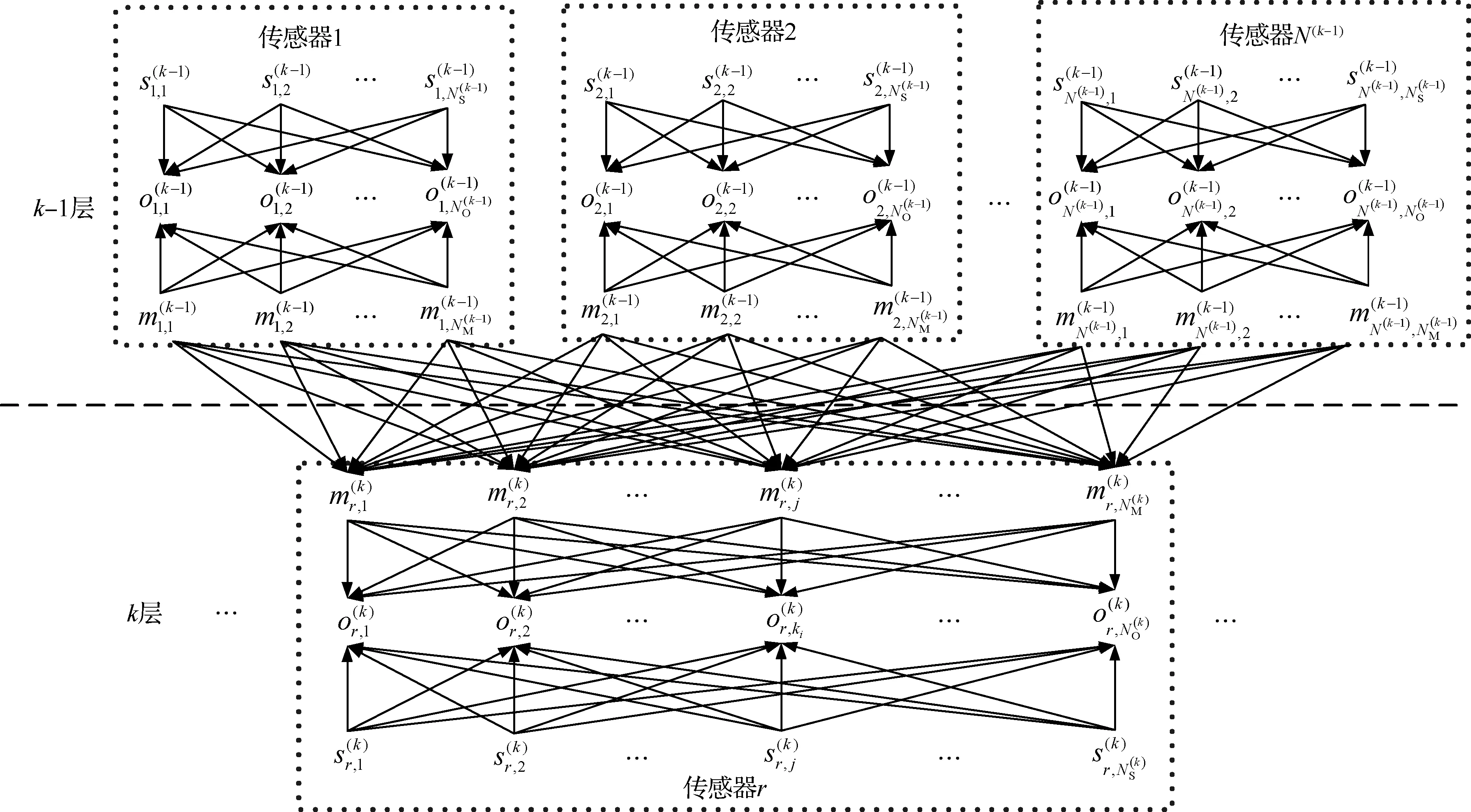
圖5 多層傳感器狀態(tài)融合模型


(13)
(14)

(15)
(16)
(17)

(18)
(19)


(20)


(21)
根據(jù)上述模型和算法,融合第k-1層和第k層傳感器的觀測結果,對第k層系統(tǒng)狀態(tài)和傳感器狀態(tài)的前向估計過程以及對k-1層的系統(tǒng)狀態(tài)和傳感器狀態(tài)的反向校驗過程如圖6所示。至此,我們完成了考慮傳感器不確定性的多層故障診斷系統(tǒng)狀態(tài)估計和校驗的遞推關系,可以對考慮傳感器不確定狀態(tài)的多層故障診斷系統(tǒng)傳感器信息融合模型進行建模。
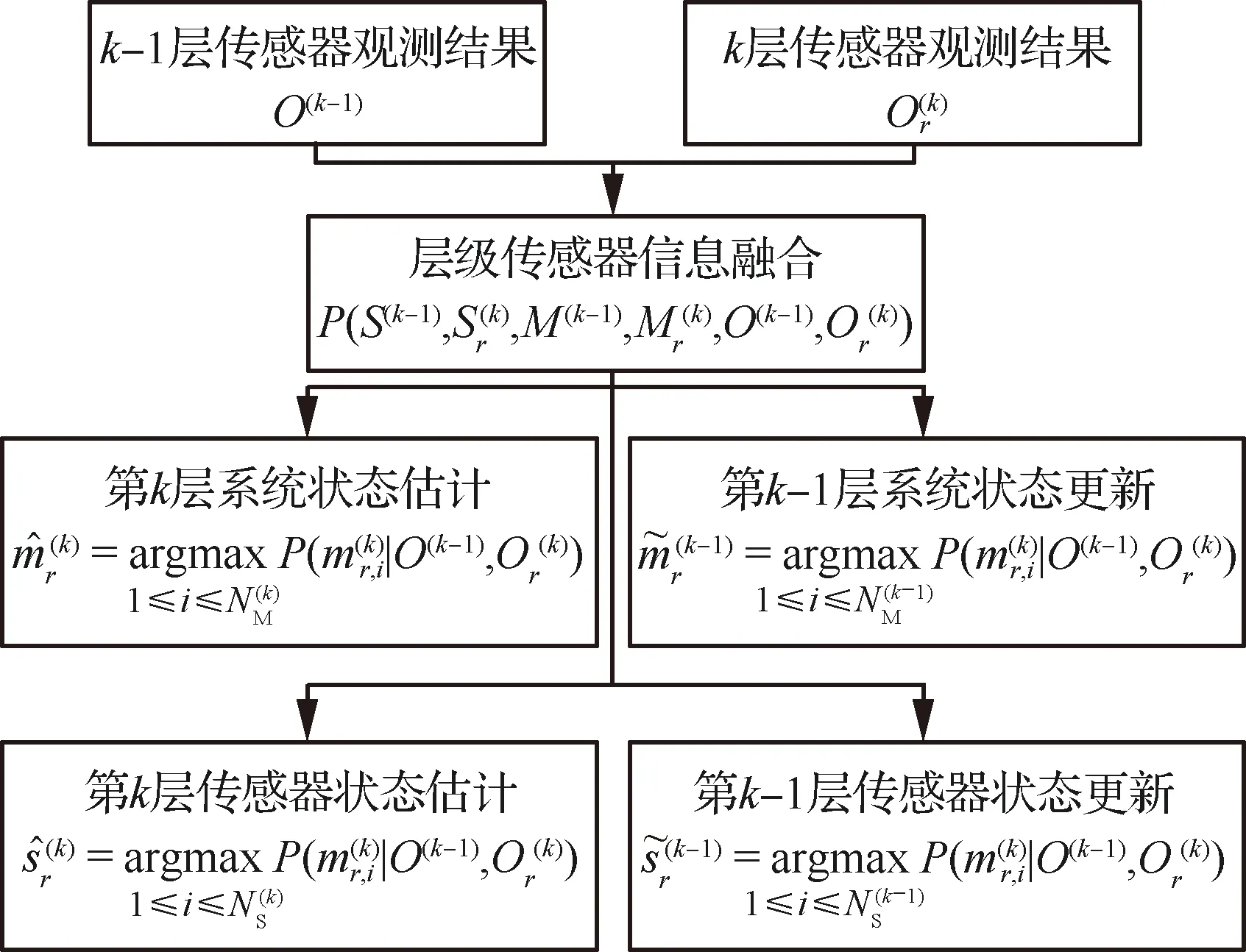
圖6 多層傳感器信息融合過程
根據(jù)此模型,利用復雜故障診斷系統(tǒng)中多傳感器之間的耦合關系,可以逐層估計和校驗系統(tǒng)狀態(tài)與傳感器狀態(tài),提高故障診斷系統(tǒng)的準確率,降低因單一傳感器故障率或者共因共模原因導致的某一類傳感器故障對系統(tǒng)故障診斷推理的影響,充分融合傳感器的個體信息與系統(tǒng)模型的整體信息,發(fā)揮復雜機載系統(tǒng)傳感器的裕度資源優(yōu)勢,以保證故障診斷系統(tǒng)的可靠運行。
2 機載系統(tǒng)的多層診斷模型構建
以飛機機載系統(tǒng)為例,考慮傳感器不確定性的分層傳感器信息融合多層故障診斷架構如圖7所示。整個故障診斷架構可分為部件級、分系統(tǒng)級、系統(tǒng)級和飛控級。
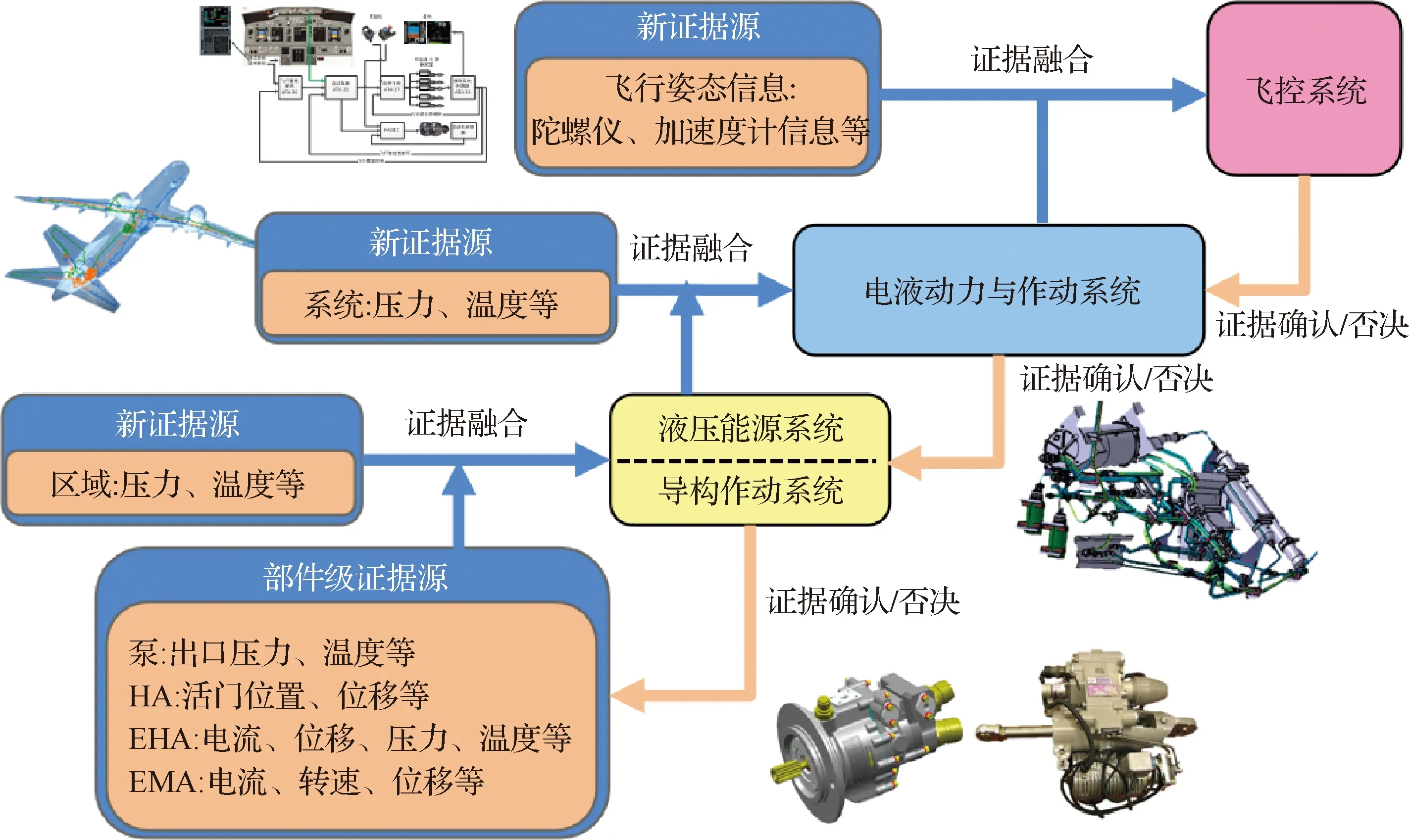
圖7 機載系統(tǒng)分層傳感器信息融合故障檢測架構
在機載系統(tǒng)分層傳感器信息融合故障檢測架構中,每一區(qū)域的傳感器不僅融合該區(qū)域內及下一層傳感器的檢測特征,同時對所有傳感器檢測結果進行校驗,從而充分考慮單一傳感器的不確定性,實現(xiàn)傳感器信息前向融合與反向校驗相結合的系統(tǒng)狀態(tài)估計。基于分層傳感器信息融合的故障識別算法,整個機載系統(tǒng)故障診斷及傳感器狀態(tài)識別系統(tǒng)的工作流程架構如圖8所示。
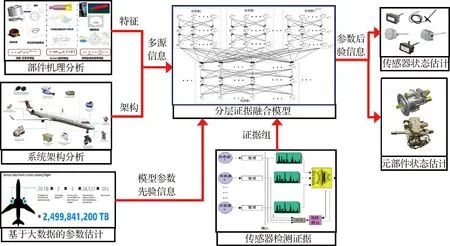
圖8 機載傳感器故障診斷系統(tǒng)
本文提出的基于不確定傳感器狀態(tài)的機載系統(tǒng)多層故障診斷算法在具體執(zhí)行時的流程如圖9所示。首先通過歷史故障數(shù)據(jù)庫,計算分層故障診斷模型的先驗概率和似然函數(shù);然后將系統(tǒng)各層級不同傳感器的數(shù)據(jù)進行結構化處理,變成故障診斷模型可以運算的狀態(tài)概率信息流;通過前向融合和反向檢驗,得到系統(tǒng)狀態(tài)和傳感器狀態(tài)的估計;最終將新的故障診斷結果存入故障數(shù)據(jù)庫。
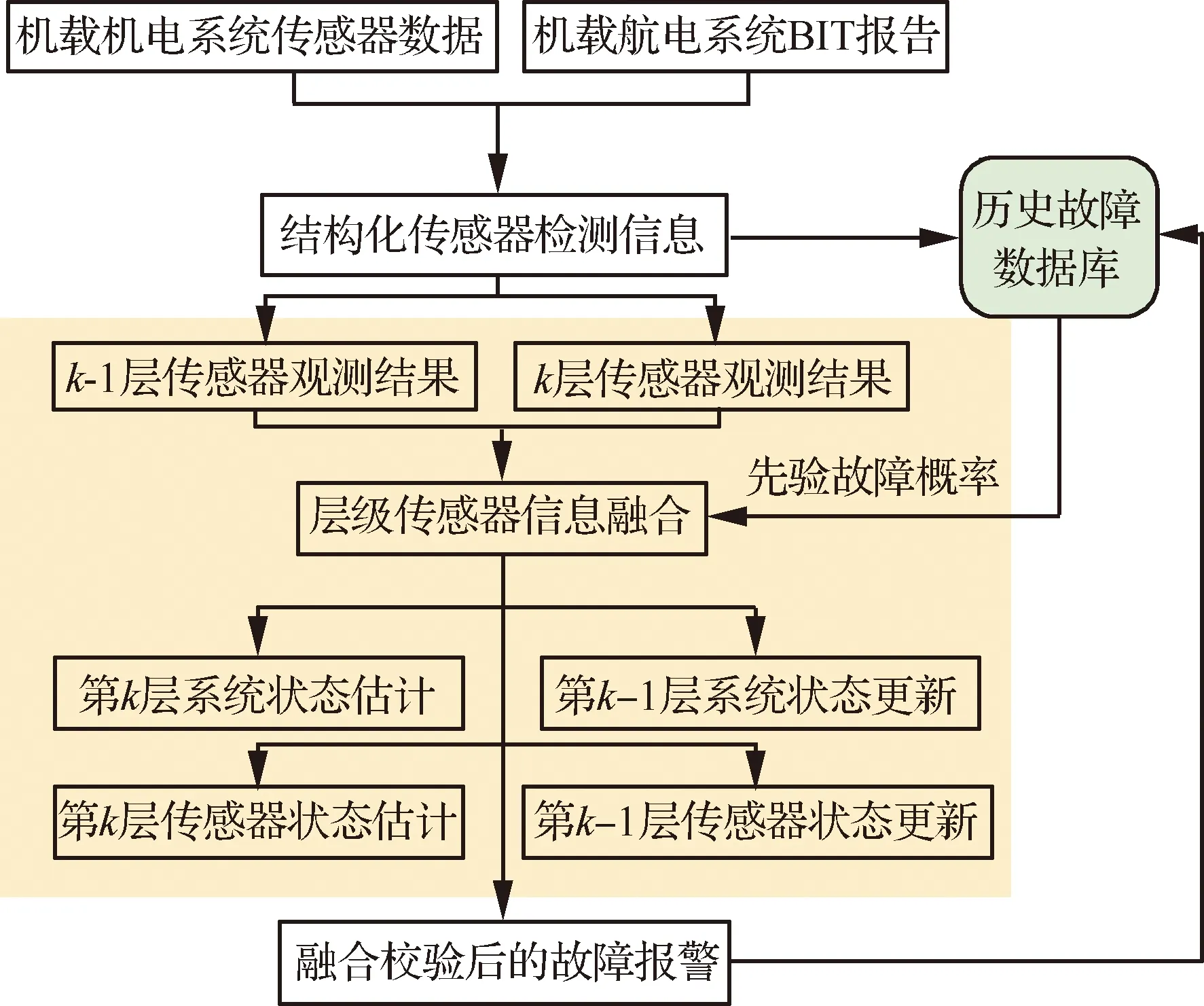
圖9 機載系統(tǒng)多層故障診斷算法流程
構建機載系統(tǒng)故障診斷及傳感器狀態(tài)識別系統(tǒng)的基本過程包括區(qū)域傳感器檢測特征映射、分層傳感器信息融合、基于飛行數(shù)據(jù)記錄儀(FDR)的模型訓練3個階段。
2.1 區(qū)域傳感器檢測特征映射
區(qū)域傳感器檢測特征映射實現(xiàn)系統(tǒng)區(qū)域狀態(tài)到傳感器檢測狀態(tài)的映射關系,即建立圖2所示的傳感器檢測模型。該模型的輸入是傳感器檢測到的各個狀態(tài)。各傳感器信息以結構化的狀態(tài)空間和概率的數(shù)學形式在各層模型中傳遞。具體來說,若是機載電子系統(tǒng),則其底層傳感器的數(shù)據(jù)類型為BIT檢測結果,表征為二進制的正常或故障狀態(tài);若是機載機電系統(tǒng),則其底層傳感器的數(shù)據(jù)(如壓力、速度、角度等)經過信號處理、特征提取、閾值判斷后,表征為正常、偏高、或偏低等離散狀態(tài)。同時通過歷史故障數(shù)據(jù)的積累,可以得到在歷史故障中各個傳感器狀態(tài)、LRU狀態(tài)及其傳感器報警歷史數(shù)據(jù)的概率統(tǒng)計并計算其先驗函數(shù)。該模型的分析結果為分層診斷模型提供最底層的傳感器信息流,用作上層的傳感器信息融合和反向校驗。
通常,構建區(qū)域傳感器檢測特征映射模型的方式包括基于失效物理的機理映射模型[19]和基于數(shù)據(jù)驅動的檢測映射模型(如BP神經網絡等)。
2.2 分層傳感器信息融合
分層傳感器信息融合實現(xiàn)層級之間傳感器檢測結果的交叉校驗。由圖3和圖5可知,層級之間傳感器檢測信息交叉校驗是通過層級之間系統(tǒng)的狀態(tài)傳遞過程實現(xiàn)的。因此分層傳感器信息融合的核心是構建系統(tǒng)狀態(tài)傳遞模型。
在構建系統(tǒng)狀態(tài)傳遞模型過程中,需同時考慮系統(tǒng)架構,以及系統(tǒng)中信號和能量的傳遞過程。例如文獻[20]基于異構作動系統(tǒng)的能量傳遞過程建立了故障狀態(tài)傳播模型如圖10所示。
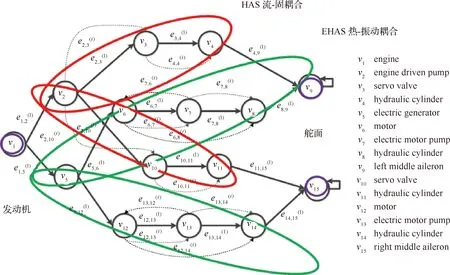
圖10 異構作動系統(tǒng)的系統(tǒng)故障狀態(tài)傳播模型[21]
利用該模型中狀態(tài)間的傳遞和耦合關系,可以實現(xiàn)HA、EHA,以及能源系統(tǒng)的區(qū)域傳感器檢測傳感器信息的融合。
2.3 基于FDR的模型訓練
基于FDR的模型訓練用于為分層傳感器信息融合模型提供先驗信息。根據(jù)系統(tǒng)復雜程度和分析層級,分層傳感器信息融合模型存在大量的不確定信息,該信息只有通過大量的數(shù)據(jù)統(tǒng)計和訓練實現(xiàn)參數(shù)的辨識。當前空客、波音、BAE等積累了大量的FDR數(shù)據(jù)可用于模型的訓練。
例如針對民機自動駕駛系統(tǒng)結構組成,構建的傳感器故障診斷模型如圖11所示。
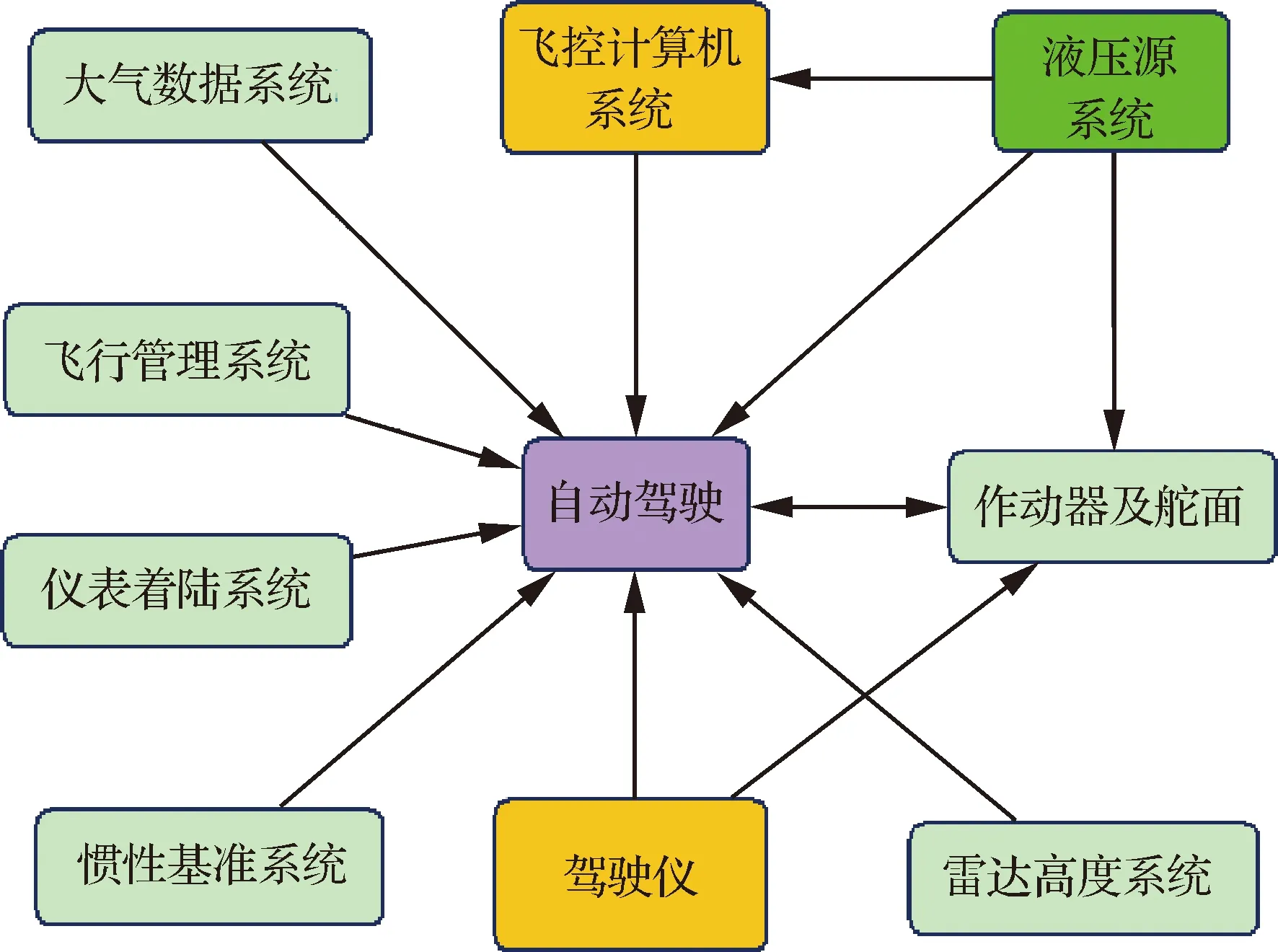
圖11 自動駕駛分層傳感器信息融合模型
該模型中共有712個節(jié)點實現(xiàn)4層299個傳感器/BIT的傳感器檢測信息融合,各檢測點如表1所示。
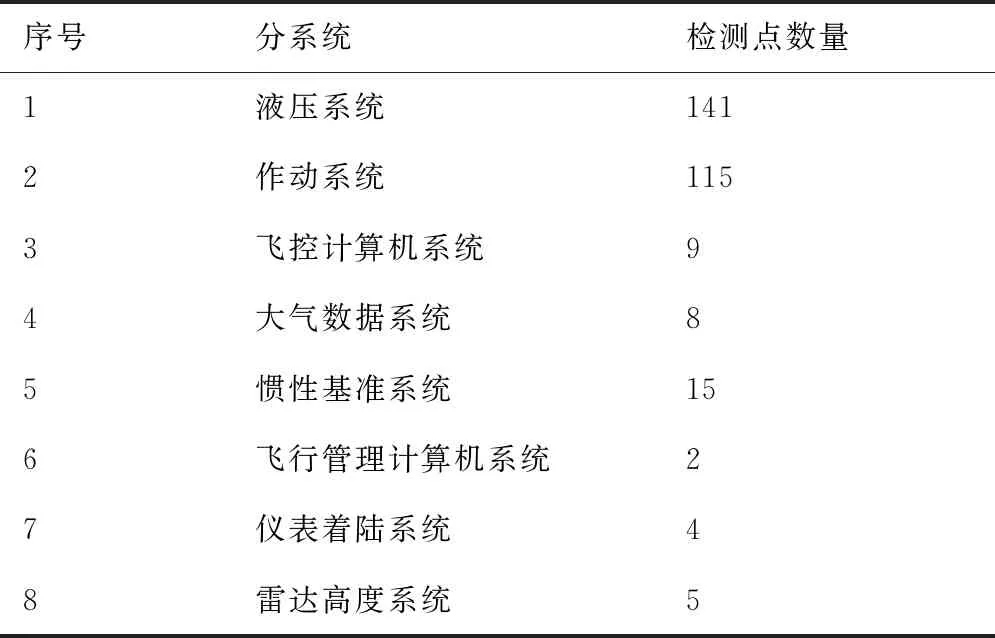
表1 自動駕駛檢測傳感器信息
對該模型的訓練可采用BAE-146支線客機175 570架次的FDR離線數(shù)據(jù)進行訓練,通過充分訓練,該模型可用于飛控系統(tǒng)的診斷。
3 案例分析
3.1 多層機載系統(tǒng)案例描述
本文針對某型民機1#液壓系統(tǒng)地面試驗臺(如圖12所示)構建分層傳感器信息融合的發(fā)動機驅動泵(EDP)通道傳感器診斷系統(tǒng)用于驗證本文算法的有效性。
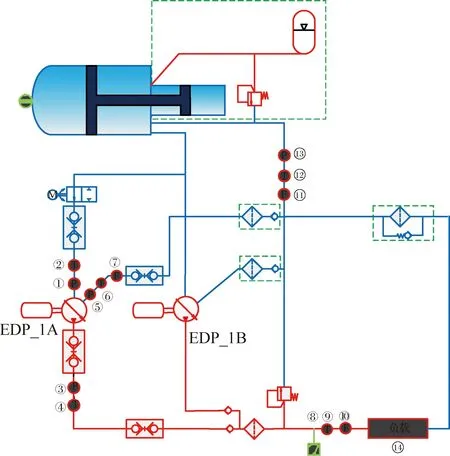
圖12 1#液壓系統(tǒng)地面試驗臺
在上述模型中,傳感器的類型如表2所示。依據(jù)該案例對象構建的3層機載系統(tǒng)模型層級定義如表3說示。
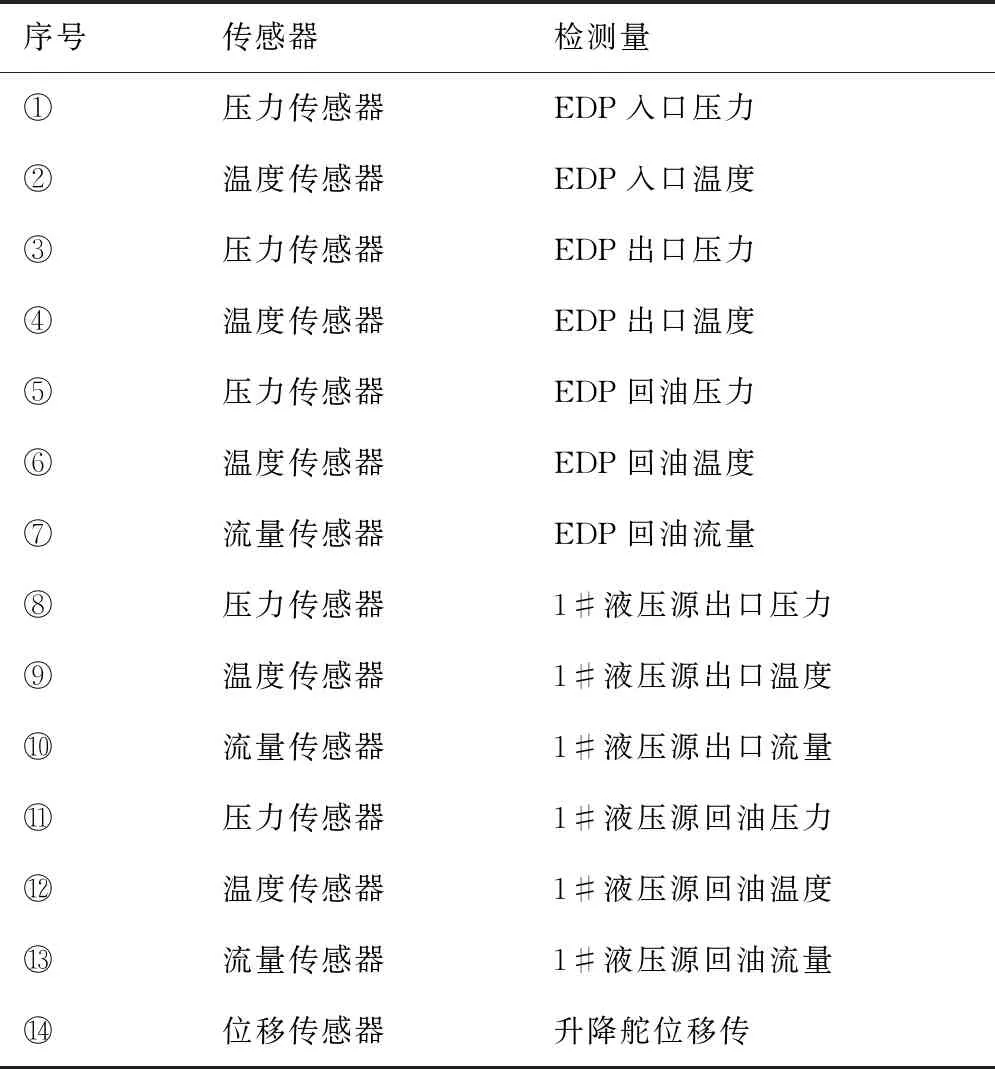
表2 1#液壓系統(tǒng)傳感器類型
將上述傳感器進行分層融合,如表3所示。
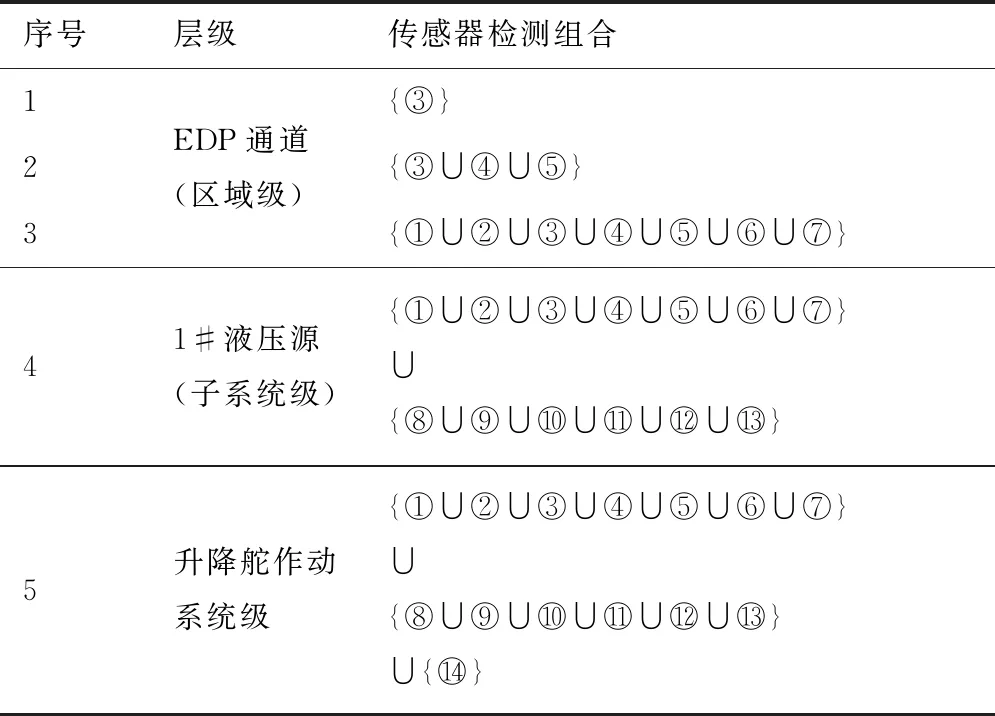
表3 1#液壓系統(tǒng)傳感器檢測傳感器信息融合層次
3.2 EDP通道區(qū)域級傳感器狀態(tài)融合模型
EDP通道包含液壓泵(EDP_1A)、開關閥(Switch_Valve1)、泵入口液壓接頭(Inlet_Valve)、泵出口液壓接頭(Outlet_Valve)、高壓安全閥(Relief_Valve),以及泵回油液壓油濾(Return_Filter)組成。
EDP通道各部件的狀態(tài)定義如表4所示所示。
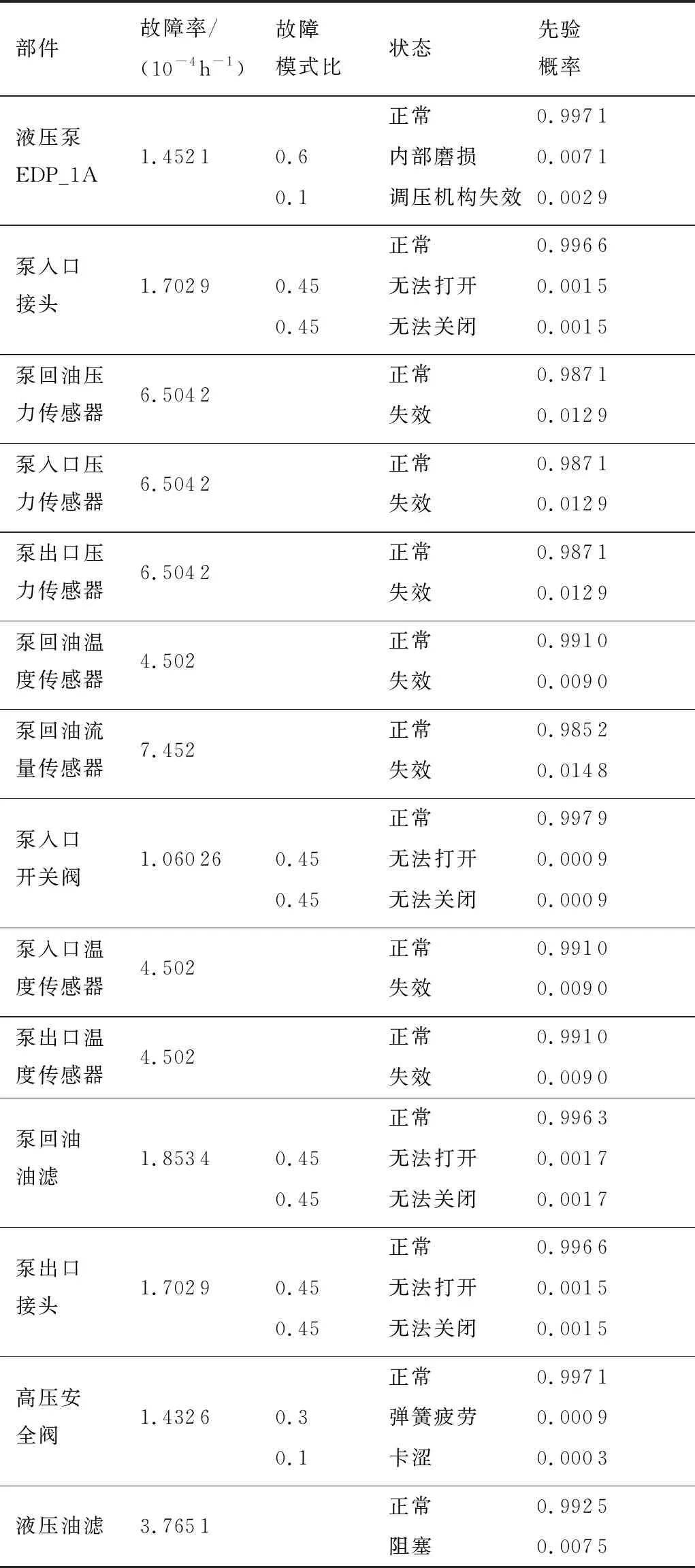
表4 EDP通道各部件的狀態(tài)定義
部件的故障率通過文獻[21-22]得到。在本案例中,假設飛機的飛行時間為20 h,根據(jù)指數(shù)失效率模型,得到部件各狀態(tài)的先驗概率。
通過故障機理分析,得到部件狀態(tài)與傳感器檢測狀態(tài)之間的相關關系,如表5所示。
在表5中,“↓”表示部件的狀態(tài)導致相應的傳感器檢測結果與正常值相比偏低;“↑”表示部件的狀態(tài)導致相應的傳感器檢測結果與正常值相比偏高;“--”表示部件的狀態(tài)對傳感器檢測結果不會產生明顯影響。基于上述分析,建立EDP通道區(qū)域傳感器檢測傳感器信息融合模型如圖13所示。
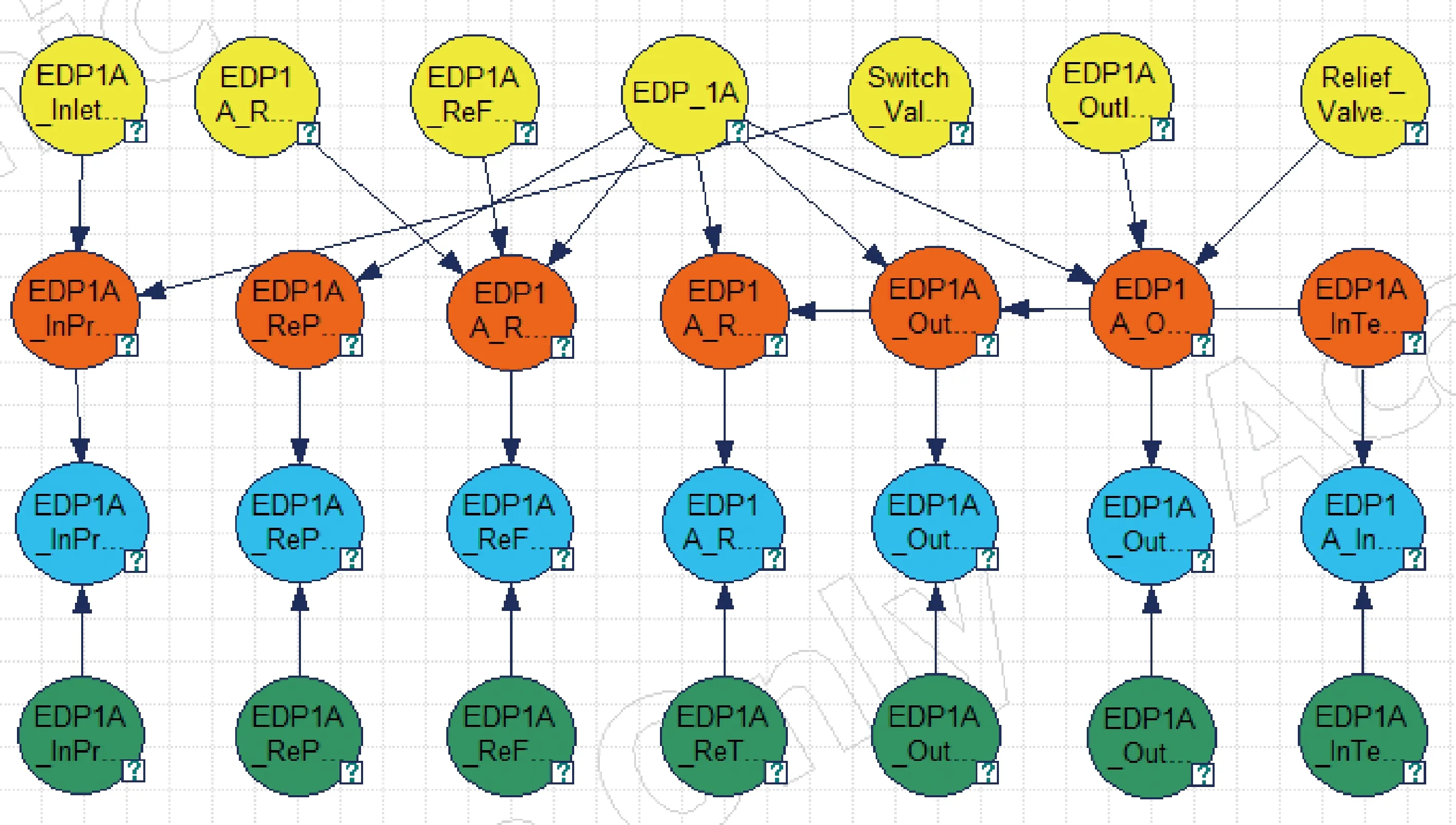
圖13 EDP通道區(qū)域傳感器檢測信息融合模型
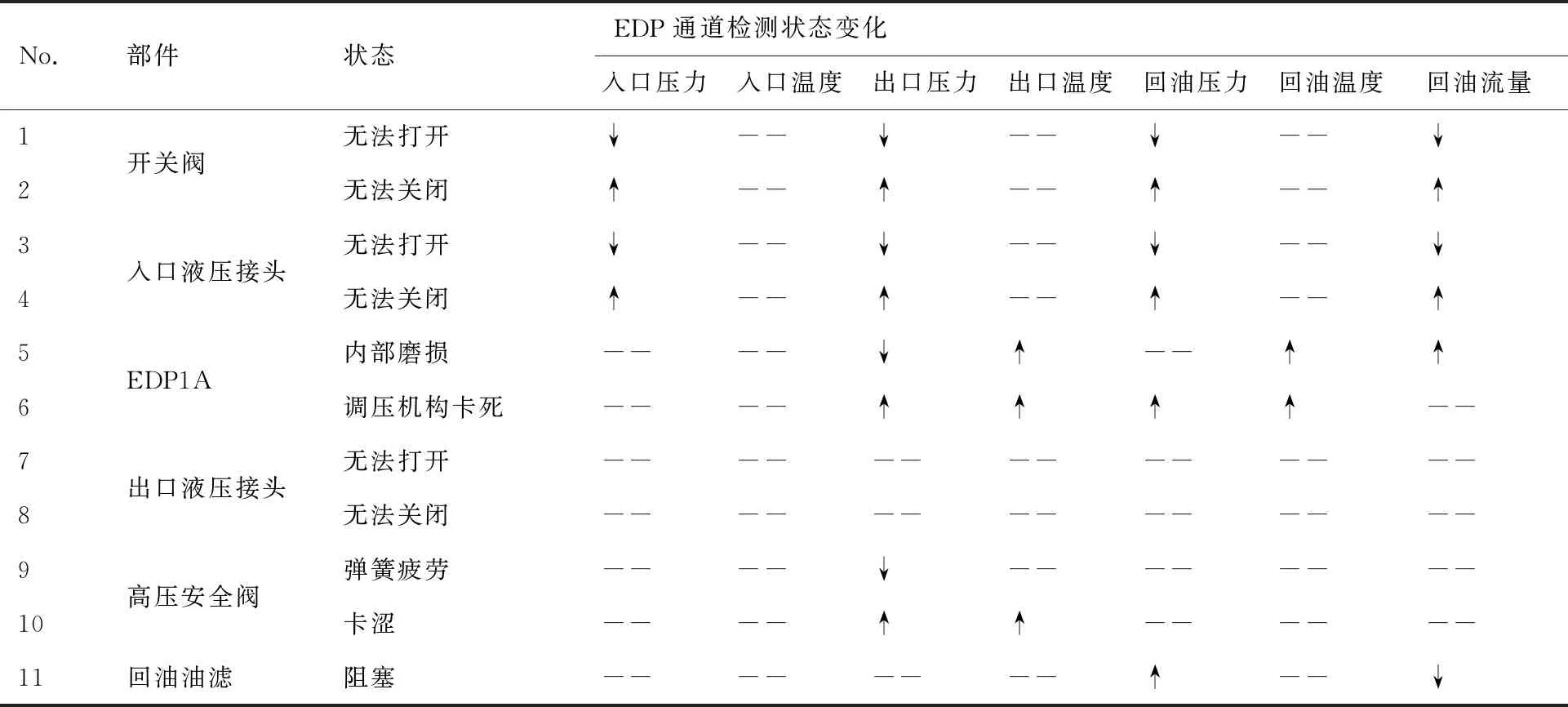
表5 部件狀態(tài)與傳感器檢測狀態(tài)之間的相關關系
在上述模型中,黃色節(jié)點表示EDP通道中設備(如液壓泵、安全閥等)的狀態(tài)(子設備是否故障);紅色節(jié)點表示系統(tǒng)中設備狀態(tài)決定的系統(tǒng)的內部狀態(tài)(系統(tǒng)是否故障);綠色節(jié)點表示區(qū)域傳感器的狀態(tài)(傳感器是否故障);藍色節(jié)點表示傳感器的檢測結果(下同)。由圖12可以發(fā)現(xiàn),系統(tǒng)內部狀態(tài)之間存在著耦合和傳遞關系。因此,系統(tǒng)內部狀態(tài)同時在多個傳感器的檢測信號上有所反映。這為傳感器檢測結果間的交叉校驗提供了基本的依據(jù)。
上述模型使用GeNie軟件進行解算,給定傳感器檢測信息為
# (①) = 正常;#(②) = 正常;#(③) = 偏高;#(④) = 正常;#(⑤) = 正常;#(⑥) = 正常;#(⑦) = 正常;
計算結果如圖14所示。
上述結果表明,在液壓泵附近的7個傳感器檢測結果中,僅有出口壓力傳感器檢測偏高,其他6個傳感器的檢測結果正常的情況下,通過融合各傳感器的檢測信息,以0.746的把握可以確定是泵出口壓力傳感器故障,而非回路中部件的故障(由圖14中可以發(fā)現(xiàn),各部件的故障后驗概率均小于0.1)。
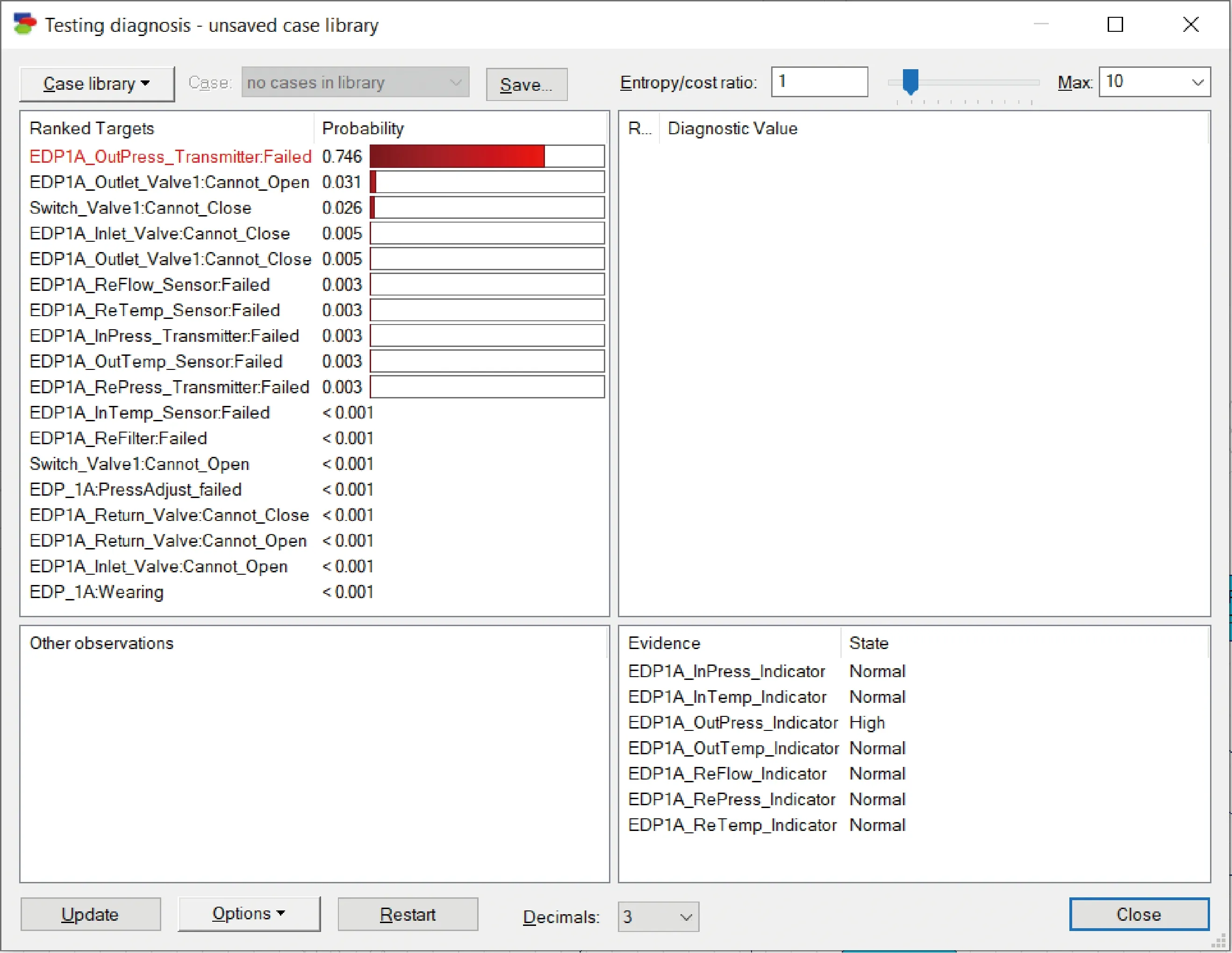
圖14 模型解算結果
通過進一步仿真發(fā)現(xiàn),在不同傳感器檢測傳感器信息融合后,系統(tǒng)故障診斷結果如表4所示。
由表6可知,第4組傳感器檢測傳感器信息融合可以以0.999 9的置信度隔離出EDP故障。融合第1組傳感器檢測結果可以隔離出EDP出口壓力傳感器故障,即本組檢測結果中,EDP出口壓力偏低的檢測結果為傳感器檢測錯誤結果,此時的報警事件為EDP出口壓力偏低虛警。同樣的,第2組檢測結果中,以0.843和0.764的置信度確定為泵入口壓力傳感器和泵出口壓力傳感器故障導致的虛警事件。第3組檢測結果中,融合各傳感器的檢測結果,發(fā)現(xiàn)存在3種故障可能性,且每種故障診斷結果的置信度偏低,且診斷結果的置信度差值小于20%,因此無法準確定位故障。需要更多的檢測傳感器信息。
圖15給出了EDP通道區(qū)域傳感器融合診斷的不確定度與傳感器可靠度之間的關系。
由圖15可知,盡管通過提升檢測傳感器的可靠性可以降低故障診斷的不確定性,但是由于區(qū)域傳感器易受區(qū)域環(huán)境條件共同影響,因此檢測傳感器信息之間的獨立性存在限制。因此需要更多獨立性的檢測傳感器信息進行診斷定位。
3.3 1#液壓源級傳感器狀態(tài)融合模型
與EDP通道的建模過程類似,圖16給出了升降舵作動系統(tǒng)級傳感器檢測傳感器信息融合模型。

圖16 系統(tǒng)級傳感器檢測信息融合模型
針對表6中的第3組檢測結果,通過增加1#液壓系統(tǒng)級傳感器,得到檢測傳感器信息融合結果如表7所示。
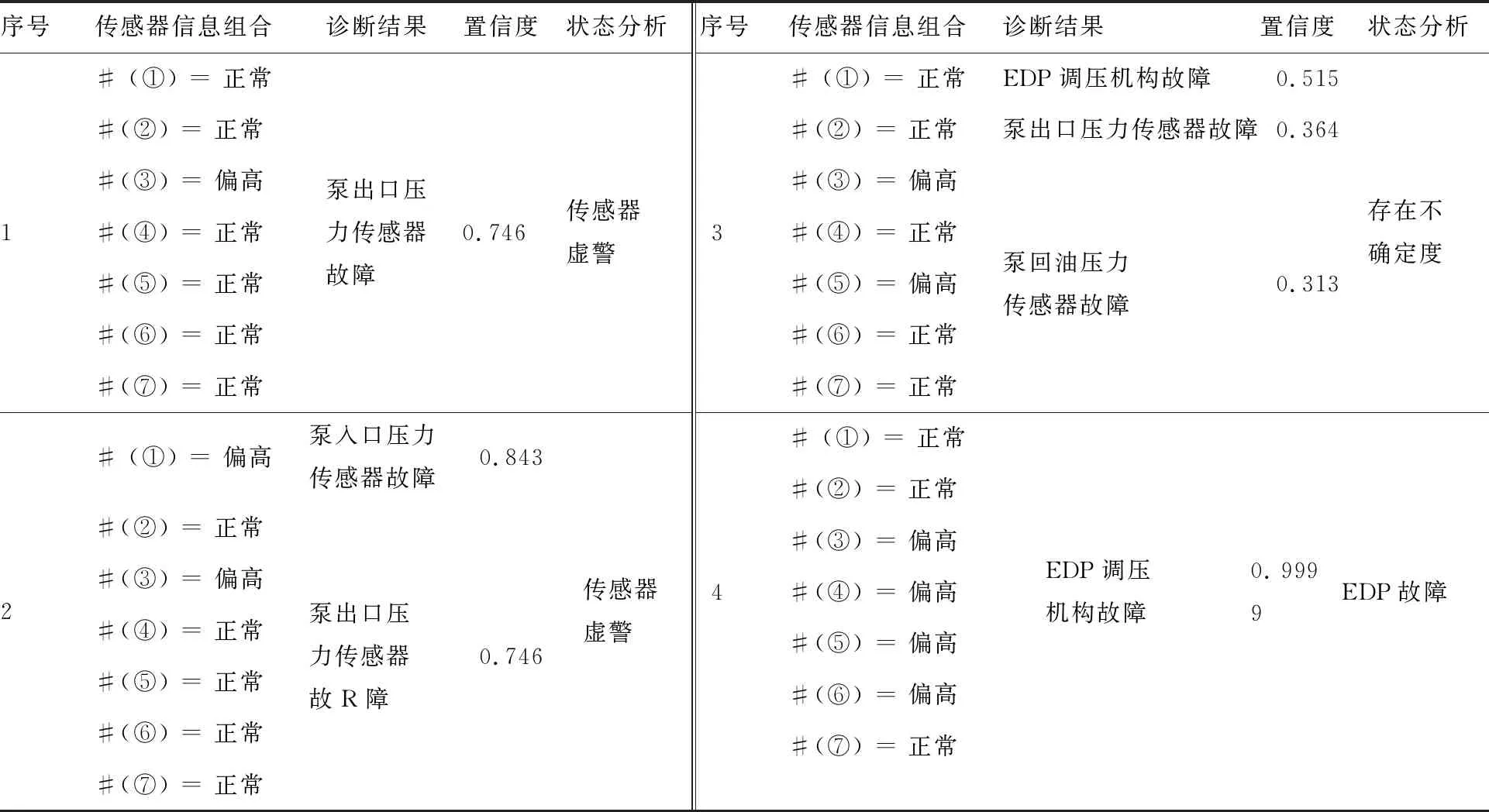
表6 EDP通道傳感器傳感器信息融合結果
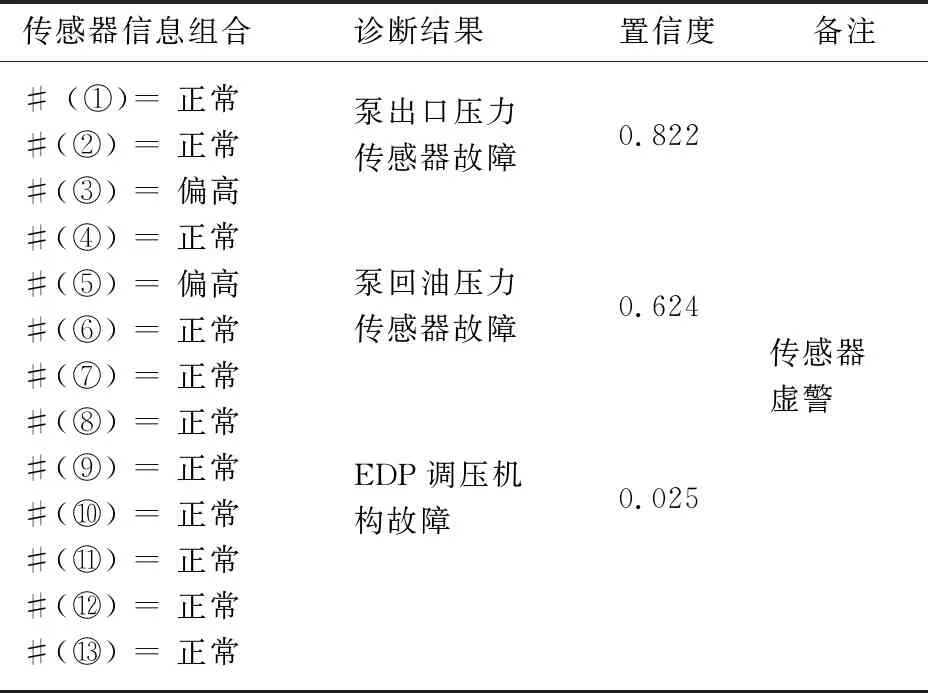
表7 1#液壓源傳感器檢測傳感器信息融合
由表7可知,在EDP通道中無法進行故障識別的3種故障通過融合1#液壓系統(tǒng)級的6個傳感器的檢測結果可以排除EDP調壓機構故障的可能性。因此可以確認該組檢測結果導致的系統(tǒng)告警事件是由傳感器故障導致的虛警事件。從而實現(xiàn)了層級之間檢測傳感器信息的交叉校驗。
3.4 液壓作動系統(tǒng)傳感器信息融合
同理,通過融合升降舵作動器的位移傳感器檢測結果可以進一步提高檢測信號維度,提高故障診斷的粒度。液壓作動系統(tǒng)傳感器信息融合模型如圖17所示。

圖17 液壓作動系統(tǒng)傳感器信息融合模型
通過不同層級之間傳感器檢測傳感器信息的融合,可有效降低傳感器故障導致的虛警發(fā)生概率,如圖18所示。
圖18中5組傳感器信息融合分別對應表3所示的五組傳感器檢測組合。通過進一步分析發(fā)現(xiàn):

圖18 層級傳感器檢測傳感器信息融合效果
1) 部件級傳感器信息融合降低了泵出口壓力傳感器65.2%的虛警率。
2) 區(qū)域級傳感器信息融合降低了泵出口壓力傳感器92.8%的虛警率。
3) 系統(tǒng)級傳感器信息融合降低了泵出口壓力傳感器95.8%的虛警率。
因此,基于分層傳感器信息融合的傳感器故障診斷方法可有效提高故障診斷的準確性。
4 結 論
1) 提出了基于多層傳感器信息融合的故障診斷方法,構建了傳感器信息前向融合和反向校驗模型,克服了故障診斷中傳感器狀態(tài)不確定給系統(tǒng)狀態(tài)評估帶來的影響。
2) 給出了機載系統(tǒng)實現(xiàn)多層故障診斷的架構,指出并實現(xiàn)了基于傳感器不確定狀態(tài)的機載系統(tǒng)故障診斷流程。
3) 用機載液壓系統(tǒng)地面試驗臺驗證了多層傳感器融合模型的故障診斷對傳感器不確定狀態(tài)的斷魯棒性,證明了多層傳感器信息融合在傳感器故障識別中的有效性。
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
