面向情景感知的指揮信息系統本體建模
2021-07-06 02:10:28董慶超司維超朱衛星
計算機技術與發展 2021年6期
董慶超,司維超,朱衛星
(1.海軍航空大學,山東 煙臺 264001;2.陸軍工程大學,江蘇 南京 210007)
0 引 言
戰場無人化、智能化是未來作戰的重要特征。目前,各種無人裝備已經大量涌現,包括無人機、無人車、無人艇、無人值守傳感器、無人水下潛航器、掃雷排爆機器人。以美軍為例,其無人機已達7 000多架,伊拉克、阿富汗戰場投入使用的地面輪式或履帶式機器人超過12 000個。在單個無人化裝備的基礎上,還出現了由多個同一或相近類型無人化裝備組成的無人作戰集群,可以自主協同實施偵察、監視、壓制、攻擊等行動[1]。美軍認為:未來軍事通信業務及指揮所的核心能力之一是自適應決策支持,基于當前情景信息與指揮所業務進行交互以支持指揮員戰場決策[2]。由此可見,戰場無人化、智能化已經初見端倪,應對單一武器裝備智能化水平的不斷突破,智能化指揮信息系統是未來系統建設的重要方向。建設智能化指揮信息系統,必須依托大數據、云計算、人工智能、深度學習等前沿技術的技術支撐,更為重要的是如何將系統相關的環境態勢、戰術戰法、交戰規則等先驗知識,通過何種形式固化于信息裝備之中,并依托知識的演繹實現指揮信息系統的智能運維,是新一代指揮信息系統研發有待解決的問題。
針對智能化指揮信息系統對領域知識的表示、推理演繹的需求,該文認為智能化指控系統建設可以綜合運用計算機領域的研究熱點,領域知識本體建模技術和情景感知技術[3]。一方面通過形式化本體建模、表示、推理技術,將戰法、規則等人的知識固化于計算設備之中;另一方面,通過情景感知技術,使指揮信息系統感受時間、空間、環境等情景環境要素,并通過知識的形式固化于系統之中,進而借助本體推理技術實現上述綜合知識的推理演繹,為智能化指揮信息系統提供一種可行的技術實現途徑。
圍繞上述技術思想,該文提出一種面向情景感知的智能指揮信息系統本體建模方法。該方法重點解決面向情景感知的智能化指揮信息系統領域知識本體表示問題,即系統情景感知環境應該包含哪些情景維度,維度下涵蓋哪些情景要素,要素之間構成何種關系等問題,通過解決這些問題逐步構建指揮信息系統領域本體。該方法首先綜合本體建模技術和國防部體系結構框架技術的思想,確定構成指控系統的核心概念和關系。在此基礎上,引進情景感知技術的思想,根據戰場環境特點、指揮信息系統領域背景,探索擴展構建指揮信息系統的情景環境本體,明確影響指揮信息系統運行的環境要素,進而為下一步的情景感知可適性邏輯計算奠定基礎。
1 相關工作
1.1 指控系統本體建模
本體建模始終是計算機研究領域的一個研究熱點,本體是針對某領域的明確的共享概念的形式化規范說明,它以結構化和易理解的形式來表示領域知識[4]。此外借助本體推理技術可以實現對領域知識的推理分析,即從現有的知識推斷出新的知識,因此該技術目前在語義網、人工智能、形式化定理證明等不同研究方向都有廣泛的應用。在指控系統的設計和分析中,國內外專家學者普遍將本體技術與指控系統建模技術緊密結合,借助本體技術不僅可以規范明確指控系統建設領域的核心概念和關系,統一不同利益相關方對復雜系統建設的共識,而且借助其形式化推理技術可以實現對系統模型的自動驗證分析。指控系統本體由哪些概念組成,目前業界沒有形成統一的意見。該文主要借鑒美國國防部體系結構框架技術(department of defense architecture framework,DoDAF),從中確定指控系統的核心概念和關系,如圖1所示。

圖1 指控系統本體模型
DoDAF是美國國防部發布的一種系統工程方法,用以指導軍事系統工程項目研發,最終目標是確保研發的體系結構與系統支持綜合集成、互連互通互操作和高性價比[5]。其發布的DoDAF2.0版本中,明確了指揮信息系統的核心數據,即元模型數據組。參考該模型可以抽取出構成指控系統的核心概念和關系,組成指控系統本體,這里采用UML建模語言表示。在此基礎上,將從指揮信息系統情景感知需求出發,進一步擴展指控系統本體,引進指揮信息系統的情景環境要素,進而形成面向情景感知的指揮信息系統情景環境本體。
1.2 情景感知技術
隨著計算機技術以及傳感器、移動設備、網絡通信、智能控制等相關軟硬件技術的發展,計算系統不再采用鍵盤、鼠標、顯示器等傳統的顯式輸入輸出手段,而是通過感知用戶的需求和環境的狀態,自動地控制設備為用戶提供服務成為可能,強調計算無處不在而又透明于用戶的普適計算,這一新型計算模式應運而生。這一計算模式的關鍵技術之一是情景感知技術,即系統可以感知用戶的狀態和環境信息,并根據這些信息調整系統的行為。如何確定系統的情景環境要素,由于情景的復雜性,不同的研究者對于情景給出了不同的定義,如文獻[6]將情景分為用戶維度和系統維度。文獻[7]使用計算維度、用戶維度和物理維度來建模情景。文獻[8]將情景分為五個維度:個體維度、時間維度、位置維度、活動維度和關系維度。參考上述研究,該文認為面向情景感知的指揮信息系統,在針對情景變化動態運行過程中,將與作戰目標、作戰過程、作戰力量、作戰資源、作戰時間、作戰空間、作戰環境、作戰規則八個方面特征相關,因此將情景環境劃分為上述八個維度。八個維度的情景環境要素及關系共同構成指揮信息系統情景本體,某特定場景下的指揮信息系統模型將是該本體的一個實例。
2 面向情景感知的指揮信息系統本體
指揮信息系統所處的政治、地理環境極為特殊,因此構建其情景環境需要綜合考慮兩個方面的因素。一方面是復雜的地緣政治、軍事局勢對指揮信息系統在態勢感知、情報保障、指揮控制、資源調配等方面的能力需求;另一個方面是指揮信息信息系統所處的特殊情景信息,如作戰時間、作戰空間,以及地理、氣象、水文、電磁等情景環境。結合1.2節的分析,這里將指揮信息系統情景環境分為八個維度,分別是作戰目標域、作戰過程域、作戰力量域、作戰資源域、作戰時間域、作戰空間域、作戰環境域、作戰規則域。作戰目標域描述了作戰的使命和作戰針對對象,目標宏觀上分為戰略目標和戰役/戰術目標兩類。目標對象是作戰過程中需要打擊的敵方目標,其具有經度、緯度、威脅半徑、威脅度四個屬性。上述環境要素之間的關系通過UML建模為圖2所示模型。作戰過程域是按照作戰階段最終達到作戰目標的過程。過程域由作戰過程、作戰階段、作戰行動組成,各要素關系如圖2所示。
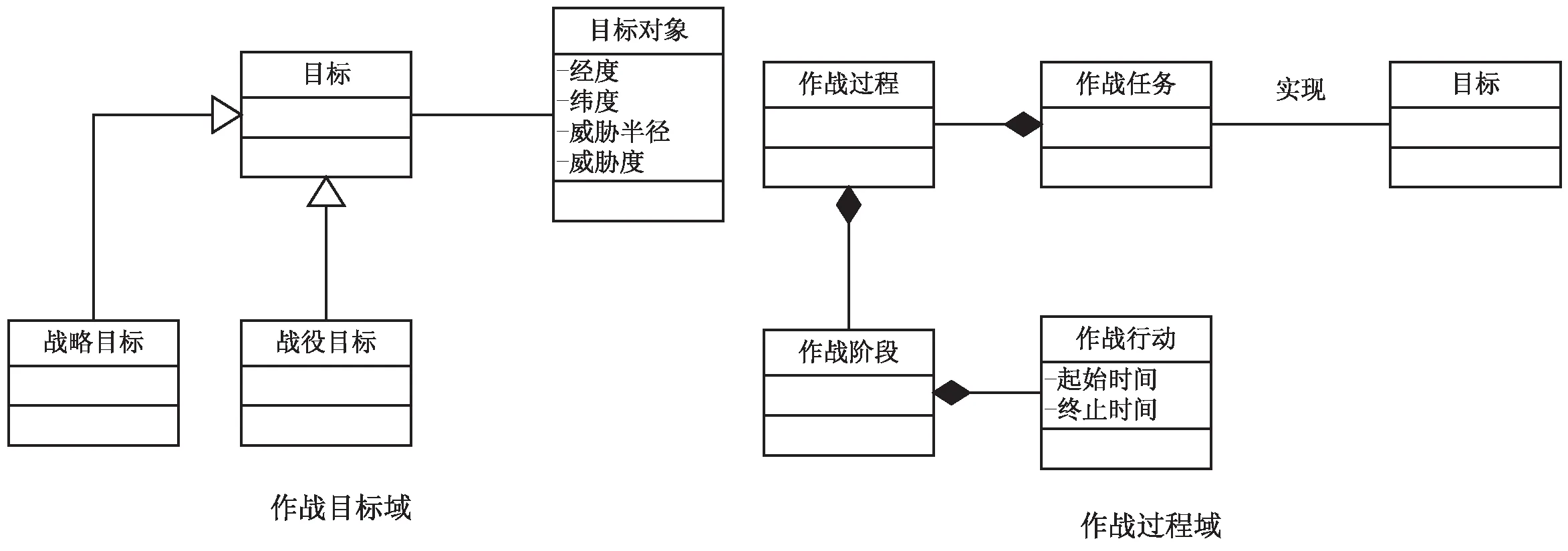
圖2 作戰目標、過程域要素組成
作戰力量域主要描述參與作戰的參與者。主要要素由作戰部隊、部隊屬性(位置、類型、數量、作用半徑)、部隊間關系(指揮、協同)組成,如圖3所示。作戰資源域主要分為裝備、武器、物資、信息,同時資源具有一定的屬性,如位置、類型、數量、送達范圍,各要素關系見圖3。需要說明的是這里的信息資源包括無線頻譜資源、網絡帶寬資源、作戰數據資源等無形資源概念。

圖3 作戰力量、資源域要素組成
作戰時間、作戰空間是描述情景環境的重要要素,這里參考文獻[9-11],確定了作戰時間和作戰空間域的組成結構。
作戰時間域包括描述時間關系的全部要素,包括時間點、時間區間、時間關系等,如圖4所示。空間域用于描述兵力、資源、過程等空間信息,包括:經度、緯度、高度、半徑、相離、覆蓋、相接等要素,具體如圖4所示。

圖4 作戰時間、空間域要素組成
環境域主要是對區域氣象、水文、地理、電磁空間等方面的描述,如圖5所示。作戰規則域是不同類型指揮信息系統所屬領域規則的集合,主要包括軍事領域中的條令條例、作戰業務規范性指導文件中規定的各項條規以及典型軍事作戰范例中潛在的業務規則。作戰規則域可以將指揮信息系統所屬領域內的一些規范化常識、知識、共識、條例、規章等,通過本體這種形式化的知識表示形式進行建模表示,并固化于信息設備中,下一步借助本體的邏輯推理優勢,實現知識的推理和演繹。
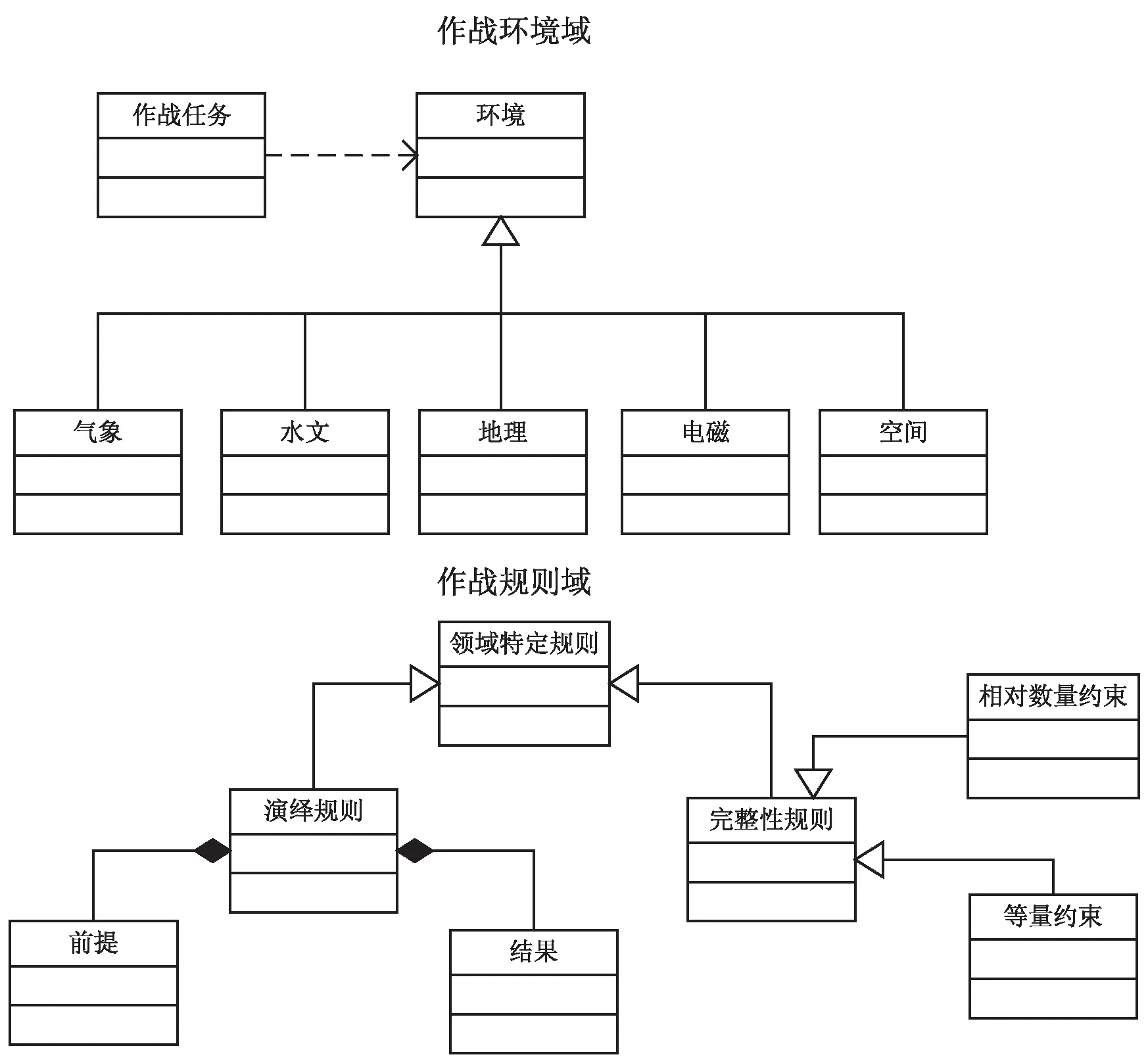
圖5 作戰環境、規則域要素組成
3 案例分析
城市要地防空任務,具有作戰反應時間短、干擾因素多等特點。因此,城市防空指揮信息系統在態勢感知、指揮決策、兵力控制等環節更加需要考慮所處區域的氣象、電磁、地理、信息資源等綜合因素,通過智能分析快速做出應答。下面以假想的城市防空指揮信息系統為例,說明本體建模方法。該文建議采用UML建模語言表示指控系統組成結構,前文定義的指揮信息系統情景本體作為類的元類型擴展UML語義,使得UML建模語言更加適合情景環境需求信息建模表示[12-13]。圖6展示了城市防空部隊情景環境模型的局部內容,其中主要作戰任務是完成城市要地防御作戰任務,完成此項任務需要指揮與控制、通信保障、態勢感知、綜合防御、信息對抗六種作戰能力的支撐,同時部隊作戰能力受到外部環境影響(情景環境),一方面是區域地理、氣象、復雜電磁環境等外部因素,另一方面,依賴于電磁頻譜資源、網絡帶寬資源、衛通信道資源等內部資源要素。
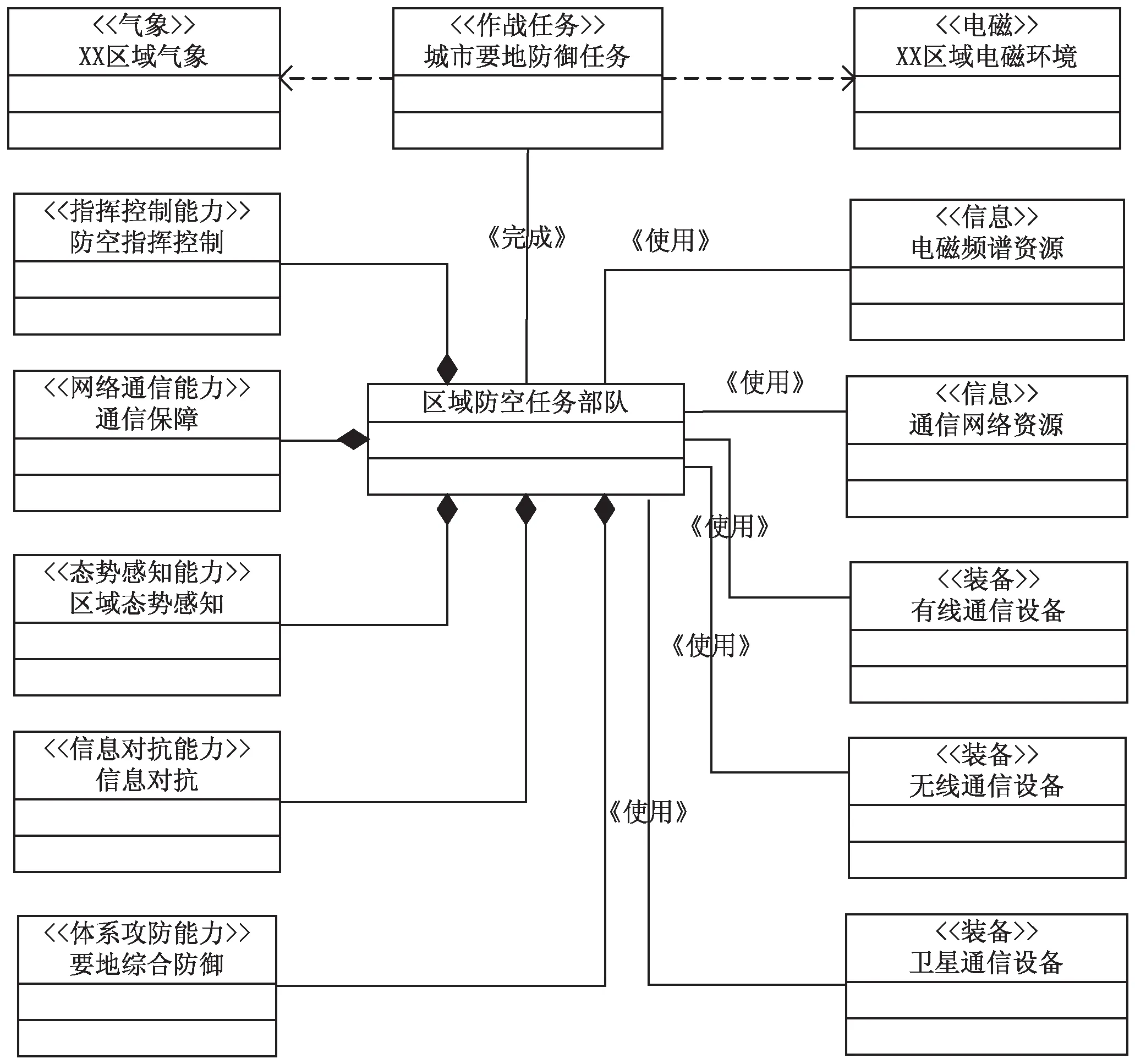
圖6 某區域防空指揮信息系統情景環境組成模型
假設在要地防空任務中,為確保重要目標防衛安全,存在以下作戰規則或常識,即系統態勢感知能力所提供目標準確識別率不低于80%,威脅目標提前預警時間不低于20分鐘。這是一條典型的演繹規則,利用本方法可以表示為以下知識本體,見圖7。

圖7 防空領域特定規則模型
此外,各種資源的合理調度一定程度上依賴于情景因素的影響,例如區域電磁環境過于復雜嚴重影響無線頻譜資源時,指揮信息系統在選擇通信手段時可以考慮光纜、同軸電纜、以太網、電話網等有線通信手段。如何通過情景環境的分析,進而智能化決策各類資源的分配和調用,在一定程度上可以綜合領域知識、情景本體,借助本體推理技術得以解決[14-15]。下一步,本研究將解決上述智能指揮信息系統本體模型的形式化手段和本體推理技術,為智能指揮信息系統的建設探索一種可行技術途徑。
4 結束語
指揮信息系統智能化是未來系統演進的必然方向,智能化指揮信息系統需要大數據、人工智能、云計算等新技術的支持,更為重要的是系統不僅要理解、學習戰術戰法、交戰規則等指揮人員的智慧,還需要準確識別、認識當前所處情景環境。以此為背景,該文提出了一種面向情景感知的指揮信息系統本體建模方法,提出從作戰目標、作戰過程、作戰力量、作戰資源、作戰時間、作戰空間、作戰環境、作戰規則八個維度刻畫智能指揮信息系統的情景環境,并通過擴展UML建模語言建模表示上述本體模型。該方法一方面在系統需求分析階段可以充分考慮影響系統運行的外部情景要素,降低大型指控系統后期開發建設風險;另一個方面,在系統分析與設計中引入情景要素,可以使得情景感知技術真正運用于指控系統的業務過程,為智能化指揮信息系統開發與建設奠定技術基礎。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
印刷工業(2020年4期)2020-10-27 02:45:52
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(2017年9期)2017-09-26 03:41:45