基于ANSYS的EMS小車結(jié)構(gòu)分析和優(yōu)化設(shè)計
2021-07-01 08:40:08趙海倫
智能制造 2021年3期
趙海倫
(南昌大學(xué),江西 南昌 330038)
1 引言
EMS小車又叫自行小車懸掛輸送系統(tǒng),是高度體現(xiàn)機電一體化現(xiàn)代技術(shù)的物流系統(tǒng),在制造業(yè)特別是生產(chǎn)車間的物料運輸中發(fā)揮著舉足輕重的作用。EMS小車由軌道、自行小車(主動車、從動車)、剪刀差結(jié)構(gòu)、提升皮帶、提升電動機和電控系統(tǒng)等組成,其中軌道中設(shè)有滑觸線和二維碼,分別給小車供電和提供定位信息。提升皮帶是小車的主要承重部件,剪刀差結(jié)構(gòu)主要用于提高小車的穩(wěn)定性。電控系統(tǒng)通過漏波通信控制小車的升降和行走。EMS小車的基本結(jié)構(gòu)和各部分主要功能如圖1所示。
EMS小車具有停車準(zhǔn)確、操作簡單、安全可靠和維護方便等優(yōu)點,特別適用于一些自動化程度較高、對物流系統(tǒng)定位準(zhǔn)確度要求較高的場所。

圖1 EMS小車基本結(jié)構(gòu)
2 應(yīng)用現(xiàn)狀及問題分析
我司EMS主要用于半成品在不同工序之間的運輸,目前該系統(tǒng)在剪刀差升降以及小車行走時存在晃動大導(dǎo)致定位不準(zhǔn)的問題,此外我司半成品為粉末態(tài)高純二氧化硅棒材,剪刀差晃動可能導(dǎo)致半成品磕碰從而導(dǎo)致報廢,因此需要對EMS小車結(jié)構(gòu)進行分析和優(yōu)化,盡可能避免小車的晃動,增強小車重復(fù)定位準(zhǔn)確度,提升小車流轉(zhuǎn)效率和安全性。
現(xiàn)場仔細(xì)觀察EMS小車升降、行走時各個部件的實時狀態(tài),發(fā)現(xiàn)剪刀差連接臂存在微量變形,小車輕微晃動。根據(jù)現(xiàn)場對小車的結(jié)構(gòu)分析,導(dǎo)致連接臂變形的主要可能原因是升降和行走過程中貨物擺動導(dǎo)致受力方向偏離豎直方向,而由于連接臂軸向的強度不足從而發(fā)生變形。本文主要介紹了一種通過ANSYS軟件對EMS小車的連接臂部件強度進行模擬分析,對應(yīng)力較大的位置進行結(jié)構(gòu)增強、優(yōu)化的方法。
3 剪刀差有限元模型建立
3.1 有限元分析步驟
有限元分析是隨著高性能計算機的出現(xiàn)而迅速發(fā)展起來的一種現(xiàn)代計算方法,其基本原理是將所求解的力學(xué)問題通過有限單元的劃分使之離散為有限的自由度,采用變分原理使其處理為代數(shù)方程組的求解問題。其本質(zhì)是將一個連續(xù)的物體簡化為有限個離散單元組成的組合體來進行求解。有限元分析分為前處理、求解計算和后處理三個步驟,其具體流程如圖2所示。
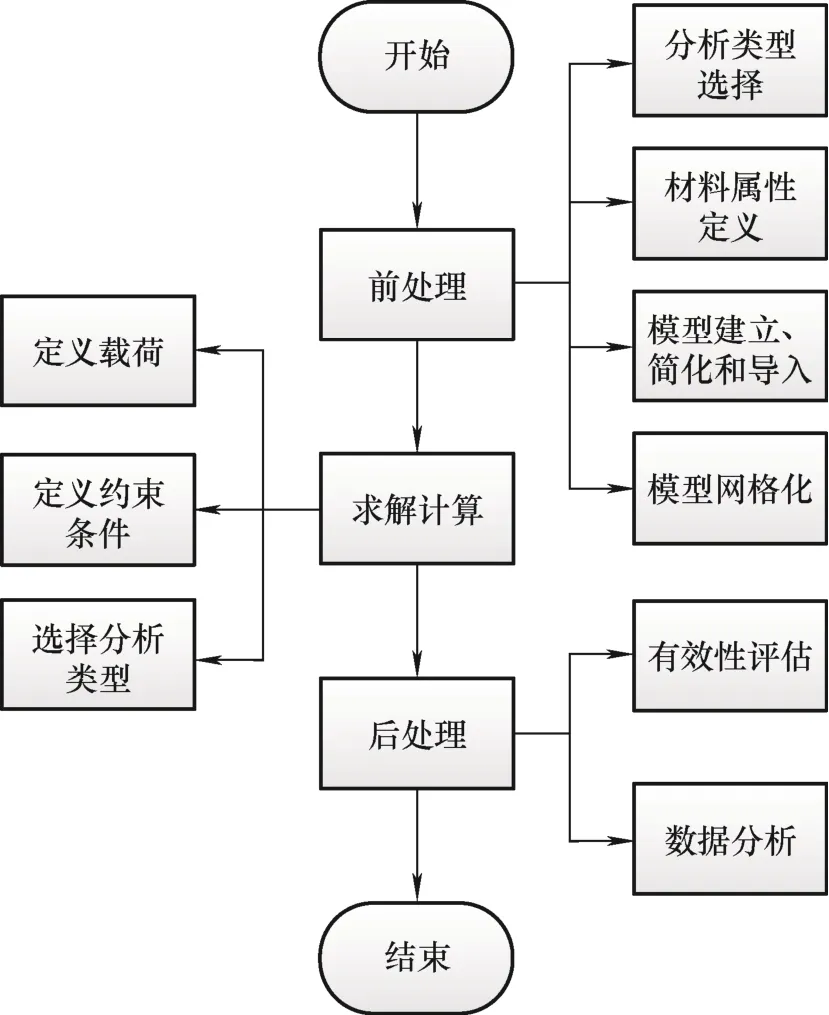
圖2 有限元分析流程
3.2 EMS剪刀差模型簡化
雖然有限元分析理論上需要保證有限元模型和實物模型盡可能相似以保證分析準(zhǔn)確度,但是大量的經(jīng)驗證明零件的一些細(xì)節(jié)結(jié)構(gòu)(如倒角、螺紋孔等)在有限元分析時可以忽略。因為這些結(jié)構(gòu)的設(shè)計目的僅僅是為了零件間的連接和工藝需求,而不是出于強度和剛度的考慮。結(jié)構(gòu)簡化的原則是:既能真實地反映結(jié)構(gòu)的幾何形狀、材料特性及邊界約束條件,又能使計算量盡可能小。
由圖1 EMS小車的整體結(jié)構(gòu)可以看出,EMS小車初始結(jié)構(gòu)零件較多,難以直接進行有限元分析,因此需要對該結(jié)構(gòu)進行優(yōu)化。根據(jù)現(xiàn)場情況發(fā)現(xiàn),剪刀差主要發(fā)生的是軸向變形,且變形主要發(fā)生在連接臂部位,而在其他部位基本不存在變形,因此可以去除電動機、皮帶等結(jié)構(gòu),僅對連接臂部分進行分析。而連接臂部分存在大量的用于固定不影響整體強度的結(jié)構(gòu)(如免鍵軸襯、關(guān)節(jié)銷擋片、襯套等),這些結(jié)構(gòu)會大大增加計算量,因此在分析時需要將這些結(jié)構(gòu)去除。由于去除了這些連接部件,不再需要考慮干涉,可以將連接臂簡化為間距相同的結(jié)構(gòu)。此外還可以去除連接臂表面的螺紋孔、倒角等結(jié)構(gòu),以避免有限元網(wǎng)格劃分失敗或者產(chǎn)生不合理形狀的單元,從而導(dǎo)致計算失敗。由于伸長量越大連接臂變形越明顯,因此本文以最大伸長量所在位置為例將連接臂部分假設(shè)為一個整體進行模型的簡化,得到的簡化模型如圖3所示。

圖3 連接臂簡化模型
3.3 模型的網(wǎng)格劃分
網(wǎng)格劃分是有限元分析的基礎(chǔ),網(wǎng)格劃分的形式將對計算準(zhǔn)確度和計算規(guī)模產(chǎn)生直接影響。由于連接臂結(jié)構(gòu)厚度均勻、形狀規(guī)則,因此使用三維實體單元進行網(wǎng)格劃分。由于連接臂受力比較簡單而且應(yīng)力分布不復(fù)雜,為了降低計算量,使用四面體單元進行網(wǎng)格劃分。經(jīng)驗表明網(wǎng)格較大時,縮小網(wǎng)格尺寸能夠顯著提高準(zhǔn)確度而不會對計算時間有太大影響,而網(wǎng)格較小時再縮小網(wǎng)格尺寸對準(zhǔn)確度影響較小,但是會明顯增加計算時間。因此本文從50 mm開始每次5 mm縮小網(wǎng)格尺寸,對比前后兩種網(wǎng)格,如果差距較大(應(yīng)變量大于2 mm),則繼續(xù)縮小網(wǎng)格尺寸。最終確定以20 mm的四面體單元對剪刀差進行網(wǎng)格劃分,最終得到的網(wǎng)格模型如圖4所示。
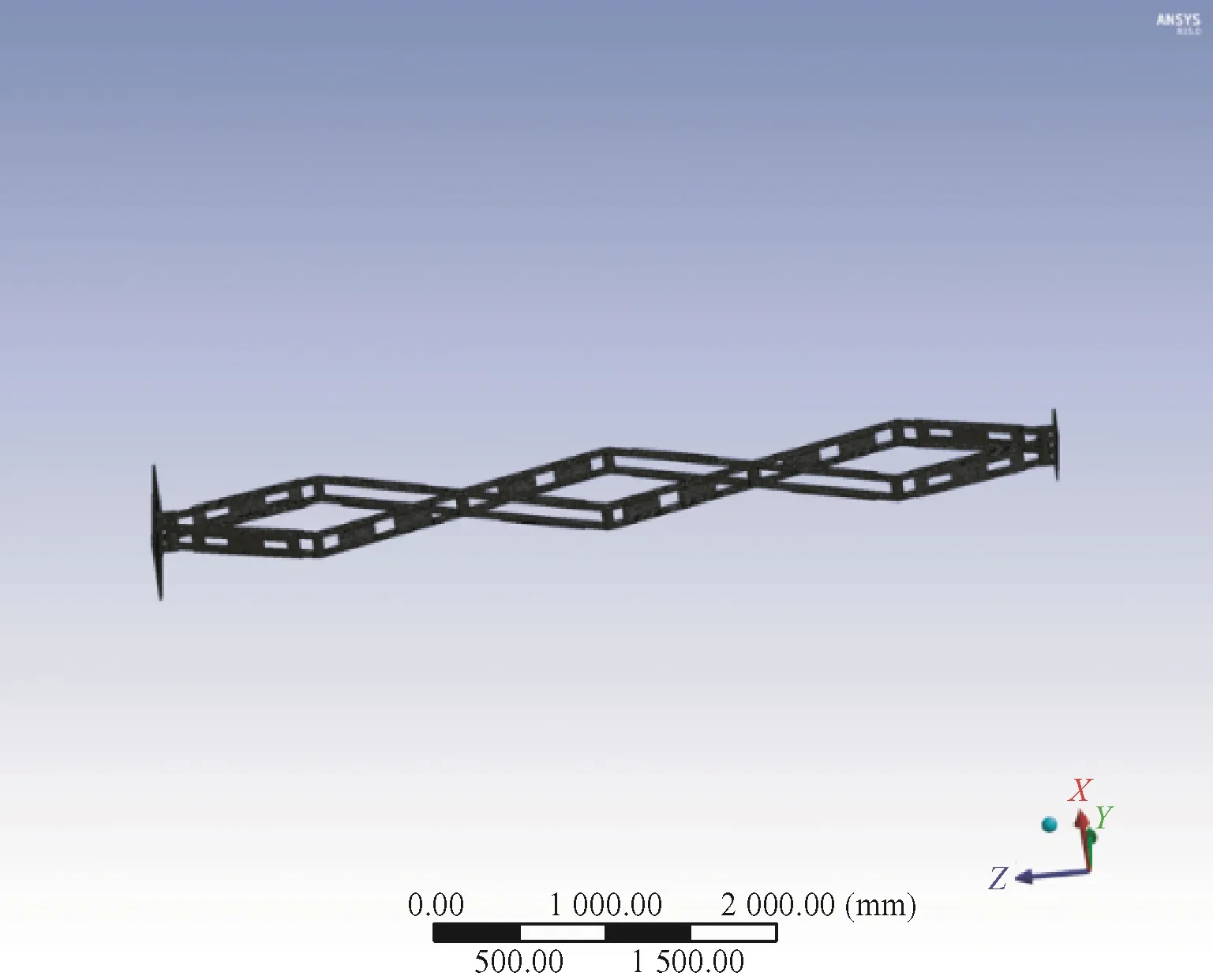
圖4 連接臂網(wǎng)格模型
4 強度分析及結(jié)構(gòu)優(yōu)化
4.1 模型的靜力學(xué)分析
由于導(dǎo)致EMS剪刀差變形的力主要來自于小車運動時所運貨物的晃動。根據(jù)現(xiàn)場測量,EMS小車運動時貨物最大的傾斜角度約為10°,所運貨物的重量一般為50~55 kg。因此以最不利載荷的極限工況為例對模型受力進行分析,連接臂部分所受的軸向力F
為
因此對模型底部固定板加載94 N的軸向力。由于模型頂部固定板與自行小車相連,所以可以假設(shè)該結(jié)構(gòu)固定。
根據(jù)上述的受力情況和邊界條件,對模型進行求解,得到EMS小車連接臂部分在最大軸向載荷工況下的應(yīng)力應(yīng)變分布圖,如圖5、圖6所示。
圖5是由ANSYS模擬剪刀差軸向載荷最大時工況的應(yīng)力分布圖,從圖5中可以看出,EMS小車載貨時連接臂部分最大應(yīng)力為62.17 MPa,發(fā)生位置在各連接臂相連處,且應(yīng)力值小于Q235的許用應(yīng)力。圖6是剪刀差連接臂位移分布圖,從圖6中可以看出連接臂的位移量基本與和頂部固定板的距離成正比,最大位移為34.02 mm發(fā)生在底部固定板。
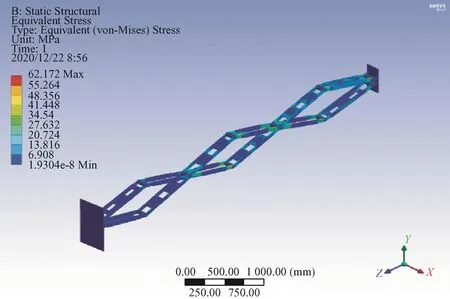
圖5 連接臂應(yīng)力分布圖
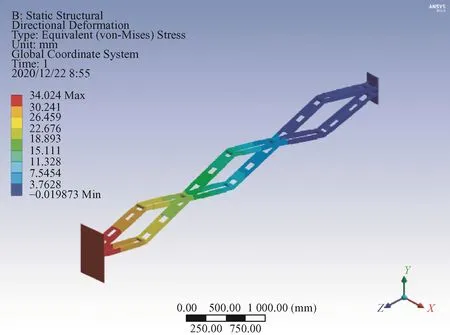
圖6 連接臂位移分布圖
4.2 模型的諧響應(yīng)分析
由于貨物近似于均勻桿件,因此載貨時貨物的晃動可以近似的看成簡諧運動,為了得到更接近實際的載荷分布,本文對連接臂模型進行了諧響應(yīng)分析。根據(jù)簡諧運動方程可以求出貨物運動的周期

根據(jù)簡諧運動方程和實際的幾何關(guān)系可以得出

A
是貨物最大振幅,這里為1.5sin10°;α
是貨物與連接臂底部固定板的夾角;ω
是與振動的頻率相關(guān)的常數(shù);x
是貨物重心位移量。因此剪刀差底部固定板所受的力

根據(jù)上述受力情況對連接臂進行諧響應(yīng)分析,得到模型的應(yīng)力情況如圖7所示。
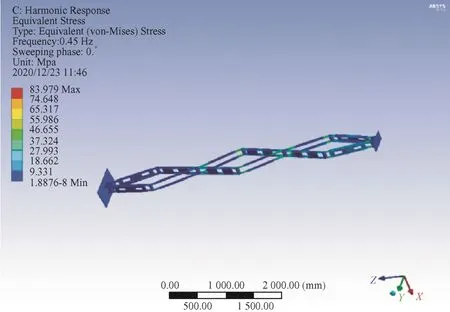
圖7 諧波載荷下連接臂應(yīng)力分布圖
由圖7可以看出,諧波載荷下連接臂最大應(yīng)力為83.98 MPa,發(fā)生在各連接臂相連處,小于Q235的許用應(yīng)力。
4.3 連接臂結(jié)構(gòu)優(yōu)化
根據(jù)強度分析的結(jié)果可以看出:剪刀差連接臂的強度較低,當(dāng)EMS小車在55 kg的負(fù)載時,連接臂會存在較明顯的晃動,因此需要對該結(jié)構(gòu)進行優(yōu)化。考慮到外置加強板對強度的提升有限,因此將連接臂改為整板折彎結(jié)構(gòu),并將鋼板厚度從5 mm增加到8 mm。此外為了避免干涉,在三維軟件中對連接臂部分進行裝配,并根據(jù)裝配情況對連接臂的結(jié)構(gòu)進行修改。將兩處存在干涉且難以通過調(diào)整中間鋼板長度來避免干涉的100 mm連接臂改為兩側(cè)加固結(jié)構(gòu):一側(cè)為整板折彎;另一側(cè)通過焊接加強板進行加固,如圖8所示。最終得到如圖9所示的優(yōu)化結(jié)構(gòu)。
圖8 連接臂優(yōu)化示意圖

圖9 優(yōu)化后連接臂部分示意圖
按照初始結(jié)構(gòu)的模型簡化方法,將優(yōu)化后的結(jié)構(gòu)進行模型簡化,得到最大伸長量時的簡化模型如圖10所示。

圖10 優(yōu)化后連接臂簡化模型
將優(yōu)化后的模型按照上面的方法進行結(jié)構(gòu)優(yōu)化和靜力學(xué)分析,得到的應(yīng)力和位移分布云圖如圖11、12所示。
圖11是優(yōu)化后連接臂結(jié)構(gòu)的應(yīng)力分布云圖,從圖11中可以看出,優(yōu)化后連接臂的最大應(yīng)力為38.79 MPa,優(yōu)化后應(yīng)力減少了37.61%。圖12是優(yōu)化后的連接臂結(jié)構(gòu)位移分布云圖,從圖12中可以看出優(yōu)化后連接臂結(jié)構(gòu)的最大位移為19.57 mm,優(yōu)化后位移減少了42.48%。
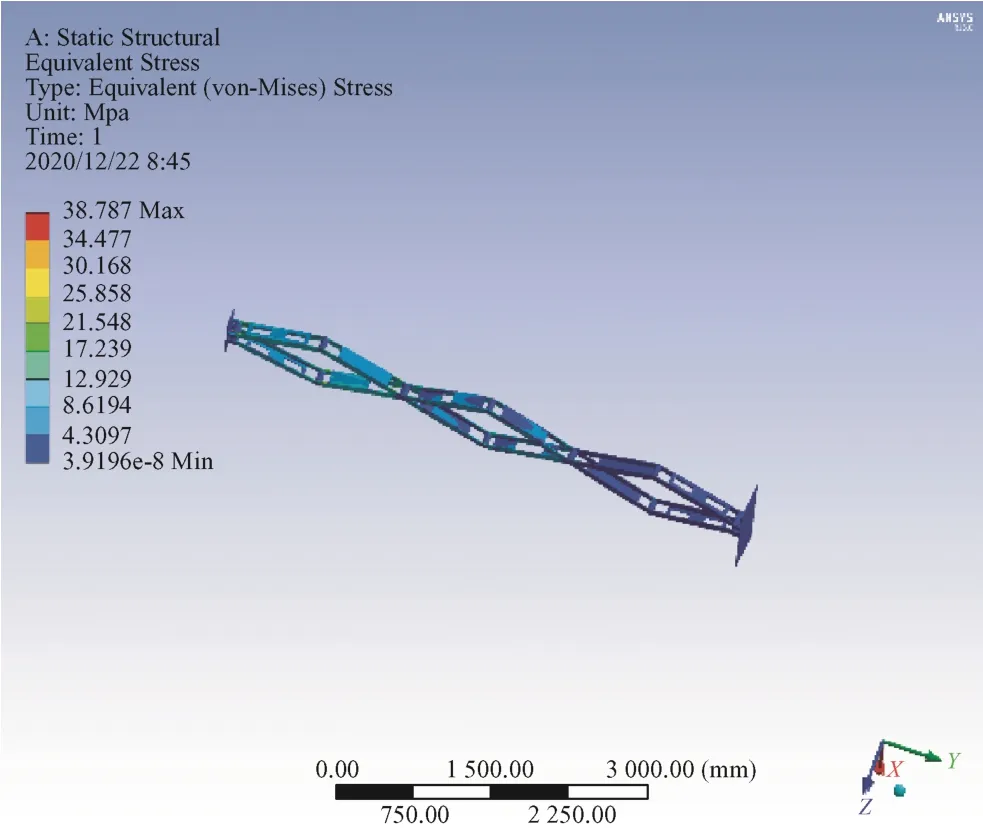
圖11 優(yōu)化后模型應(yīng)力云圖
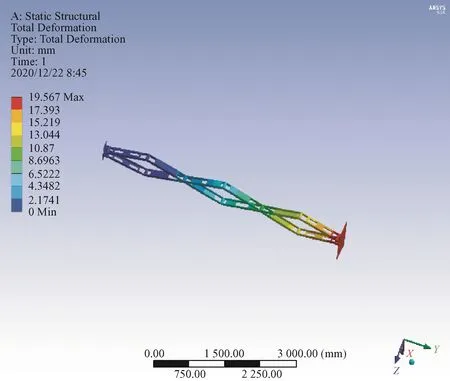
圖12 優(yōu)化后模型位移云圖
5 結(jié)束語
本文以我司EMS小車在實際使用中存在的問題為依據(jù),通過ANSYS軟件對EMS小車剪刀差部分進行了有限元分析,分別模擬了最大軸向負(fù)載下EMS小車剪刀差連接臂部分的應(yīng)力和位移情況,以及交變載荷下連接臂的應(yīng)力分布。根據(jù)分析結(jié)果對剪刀差連接臂進行了結(jié)構(gòu)優(yōu)化,并對優(yōu)化后的結(jié)構(gòu)進行靜力學(xué)分析,得出優(yōu)化后的結(jié)構(gòu)應(yīng)力比原結(jié)構(gòu)降低了37.60%,最大位移比原結(jié)構(gòu)降低了42.48%。優(yōu)化后的結(jié)構(gòu)穩(wěn)定性大幅提升,能夠完全滿足我司的實際生產(chǎn)場景使用需求。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
