列車救援車鉤受力最惡劣工況及分析方法
2021-07-01 14:33:58梁士國張云峰
裝備維修技術 2021年51期
梁士國 張云峰


摘 要:列車救援是軌道車輛不可避免的緊急情況,一般采用推送救援,且僅救援列車輸出牽引及制動,故障列車無動力,無制動。如救援列車推行被救援車輛在行進過程中,突然施加了緊急制動,可能使車鉤彈性緩沖用盡,產生很大的車鉤力,導致車鉤屈服甚至斷裂。因此,有必要梳理列車救援最惡劣工況,分析車鉤受力情況,必要時優化,確保列車救援安全。
關鍵詞:列車救援;車鉤受力;惡劣工況;分析方法
1概述
當裝載旅客的列車發生故障,無法繼續運行時,運營單位一般通過調度中心安排救援列車對故障列車進行救援,救援列車和故障列車通過車鉤連掛,將故障列車送至最近的車站進行乘客疏散并將故障列車送出正線運營軌道。救援時,由于救援車輛加速、制動;被救援車無動力無制動;線路坡道等疊加因素影響,救援工況下車鉤運用環境極為惡劣。
車鉤是車輛連接最重要的部件,主要由連掛系統和緩沖系統組成。連掛系統主要起連接車輛作用;緩沖系統用來緩和車輛運行、調車、救援作業時的縱向沖擊,吸收沖擊能量,確保列車運用各種工況平穩、安全。因此梳理列車救援最惡劣工況,分析車鉤受力情況,確保列車救援安全尤為重要。
2列車救援場景分析
列車救援分牽引救援及推送救援兩種模式。牽引救援是指一列無故障車在前方牽引故障車至救援目的地;推送救援指一列無故障車在后方推送故障車至救援目的地。相對于車鉤系統,兩種救援模下車鉤承受的救援作用力是不同的。正常救援模式下,均不會對車鉤及車體造成損壞。
在列車緊急救援分析中,會考慮最惡劣情況,也就是非正常救援模式。其中以救援車先施加并保持最大牽引力,被救援車無任何牽引及制動能力,在緊急情況下,救援車施加緊急制動的工況最為惡劣。
基于以上工況,如采用牽引救援模式,車鉤先在牽引力作用下受拉,后在緊急制動力作用下受壓,該壓力即為牽引救援模式下車鉤承受的最大力;
推送救援模式下,車鉤先在牽引力作用下受壓,而后在緊急制動力下受拉,此拉力為推送救援模式下車鉤承受的最大力。
壓縮吸能是車鉤主要特性之一,因此牽引救援不會對車鉤及車體造成風險。而推動救援模式下,車鉤最大作用力為拉力,車鉤及車體的拉伸強度較低且車鉤拉伸方向吸能少,車鉤存在因救援產生的拉力過大而產生永久變形甚至斷裂的可能性。故推送救援的危險程度遠高于牽引救援。
3計算基本原理
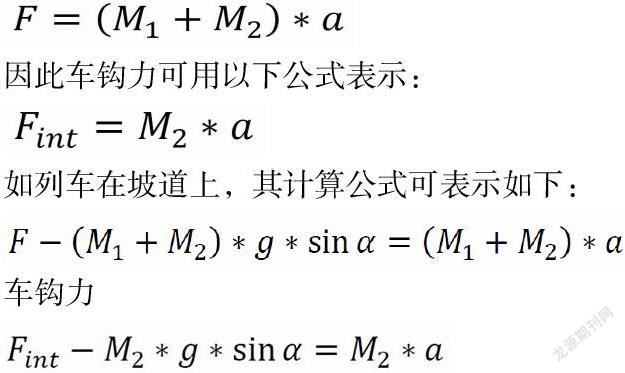
救援計算基本原理基于牛頓第二定律,物體的加速度跟物體所受的合外力F成正比,跟物體的質量M成反比,加速度a與力合力F的方向相同:
從公式可以看出救援工況車鉤力僅與合外力及質量相關,救援最惡劣工況伴隨加速和制動過程,因此反映在仿真分析中的輸入參數主要有車重、牽引力、制動力、牽引力及制動力響應時間等。
4仿真分析方法
4.1 確定仿真輸入參數
為確保救援仿真分析準確,需輸入表1顯示參數。
4.2確定仿真工況
確定具體仿真工況,如:當一列AW0的列車援救(推送)另一列AW3超載的列車時,兩列列車聯掛在一起,當救援列車緊急制動而被救援列車沒有制動或制動失靈時,列車間車鉤受力情況。
(1) 救援車(AW0)與被救援車(AW3)均在35‰坡道上(下坡),施加100%牽引加速時突然實施緊急制動。
(2) 救援車(AW0)在平道,被救援車(AW3)在35‰坡道上(下坡),施加100%牽引加速時突然實施緊急制動。
4.3進行計算機仿真
根據以上參數及工況進行計算機仿真分析。采用列車縱向動力學計算程序,按照列車縱向動力學理論,將整列車視為由車鉤連接的若干單自由度(縱向)質點,通過對質點系運動微分方程組的逐步求解計算各個車的加速度、車鉤力、速度歷程曲線,研究不同工況下車鉤的受力情況。
列車縱向動力學主要用來分析不同的列車編組、不同車輛配置、不同運行工況及不同的線路條件下組成列車的車輛間的縱向動力作用。列車縱向動力學模型如圖3所示。一般情況下,取一節車為一個分離體。
對于N節車輛可列出N個微分方程,組成一個二階微分方程組。
4.4仿真結果分析及優化
對仿真結果進行分析,若有風險需采取優化措施,如:救援牽引力盡可能小(滿足推動故障車上坡啟動的最小牽引力);限制救援緊急制動力/實現救援車與被救援車同步制動;提高緩沖器壓縮起始力值/更換其它拉伸方向性能更高的緩沖器等。
5結束語
本文詳細分析了軌道車輛列車救援場景,篩選出列車救援車鉤受力最惡劣工況,并介紹了救援工況車鉤受力計算基本原理、仿真分析方法,為列車救援車鉤受力分析提供參考。
參考文獻:
[1]吳敏. 地鐵列車救援安全措施研究[J]. 交通世界 2020(01): 204-205,219.
[2]鄧文豪,張金. 城軌8A編組列車救援模式車鉤受力控制方法探討[J]. 現代城市軌道交通 2017(08) :47-50.
[3]黃豪,匡希超,曾文娟等 城軌車輛救援工況下車鉤受力性能分析[J]. 內燃機與配件 2018(06):51-52.
[4]張登科,黃江偉,李繼賢 救援工況下列車車鉤力試驗研究 [J]. 科學技術創新2017(20):101-102.
作者簡介:作者簡介:梁士國,2004年畢業于長春工業大學 機械工程及自動化專業,工學碩士,從事軌道車輛研發工作。BE2AC842-10F1-472C-9D4F-46DD673A4EE9
