水輪機導葉位置傳感器信號控制邏輯分析
2021-06-30 03:08:52翟玉杰艾遠高
水電與抽水蓄能 2021年3期
翟玉杰,陳 浩,艾遠高
(三峽水力發電廠,湖北省宜昌市 443000)
0 引言
水電機組導葉位置傳感器反映了水輪機導葉開度的大小,決定了機組頻率(轉速),其信號可靠性對機組穩定運行起著至關重要的作用[1]。某巨型水電站安裝有多臺單機容量700MW的混流式水輪發電機組,調速器選用可編程微機調速器[2]。接力器位移經現地傳感器采集,通過屏蔽電纜直接輸入調速器模擬量采集模件,導葉位置傳感器信號能快速直接反映接力器行程,換算得到的導葉開度值是參與調速器PID運算和控制的關鍵控制量[3]。該水電站調速器由多個廠家提供,有3種不同的調速器控制結構,其導葉位置傳感器選擇控制邏輯也存在差異。
1 “三選二”控制邏輯
目前,該電站左岸機組調速器控制器采用貝加萊X20系列PCC雙機冗余系統,電液轉換單元采用非對稱結構,其中A機控制比例閥,B機控制步進電機,組成雙電液轉換器冗余結構。該機組共設置3套導葉位置傳感器,分別為A套、B套、C套,3套導葉位置傳感器都安裝在接力器側面,屬于拉桿式磁致伸縮位移傳感器,其中A套導葉位置傳感器供調速器A機使用,B套導葉位置傳感器供調速器B機使用,C套導葉位置傳感器作為公共參考傳感器使用[4]。調速器A、B機控制器接收到導葉位置傳感器信號后通過A、B機通信互送導葉位置信號。C套導葉位置傳感器信號通過二分器分別引入調速器A機和B機控制器[5]。這樣每個控制器都收到3套導葉位置傳感器信號,并通過“三選二”邏輯判斷,用于確認調速器所收到的導葉位置傳感器信號是否可信。“三選二”邏輯控制結構如圖1所示。
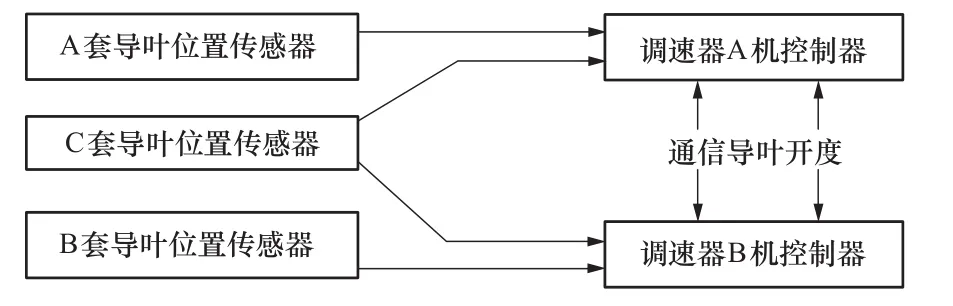
圖1 “三選二”邏輯控制結構圖Figure 1 “Two out of three”logic control structure diagram
為表述方便,現將A套傳感器采樣值簡寫為A,B套傳感器采樣值簡寫為B,C套參考傳感器采樣值簡寫為C。調速器A機控制器使用A套傳感器采樣值,增加A機傳感器故障判斷,“三選二”判斷邏輯框圖如圖2所示。
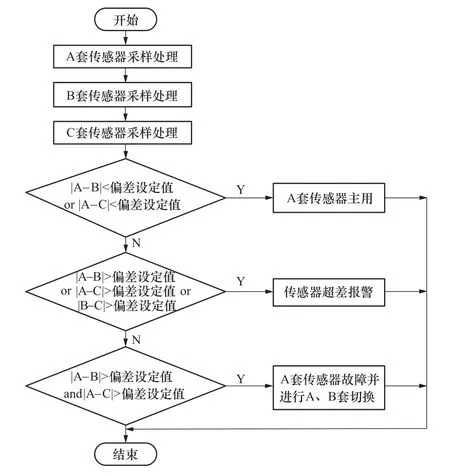
圖2 某機組“三選二”邏輯框圖Figure 2 “Two out of three”logic block diagram of a unit
在3個傳感器都沒有故障的情況下,|A-B|<偏差設定值或|A-C|<偏差設定值,則選擇A套主用,若|A-B|>偏差設定值或|A-C|>偏差設定值或|B-C|>偏差設定值進行傳感器超差報警;|A-B|>偏差設定值且|A-C|>偏差設定值,則判斷A套傳感器故障,并進行A、B機控制器主從切換。在程序運算過程中,導葉開度信號仍然是A機控制器采用A套主接傳感器信號作為主信號源,“三選二”的選擇邏輯只對主信號源的可靠性進行判斷,并不對模擬量輸出結果進行綜合計算。B機傳感器故障判斷邏輯與A機相同。
導葉位置傳感器信號“三選二”判斷邏輯,大幅提高了主用傳感器的可信度,故障判斷依據合理,對以往“二選一”邏輯提出了補充,但此判斷邏輯需外加1套硬件予以配合,對3套傳感器安裝精度要求較高,后期維護和傳感器校驗工作量較大。“三選二”的選擇邏輯只對主用傳感器可信度進行判斷,并不改變主用傳感器的輸出結果。傳感器本體損壞后,仍需調速器A、B機切換來降低故障影響。
2 “高選”控制邏輯
該類機組調速器控制器采用GE公司3機冗余MICRONET TMR系列,電液轉換單元采用雙比例閥,組成雙電液轉換器冗余結構[6]。該機組共配備2套導葉位置傳感器,分別為1號導葉位置傳感器和2號導葉位置傳感器,屬于拉桿式磁致伸縮位移傳感器,其中1號導葉位置傳感器信號通過現地采集板FTM實現輸入冗余,供調速器A機和C機103模擬量采集板使用,2號供調速器A機和C機104模擬量采集板使用,最后經控制器內部總線將1號和2號導葉位置傳感器信號送至B機CPU,這樣每個CPU都接收到兩套導葉位置傳感器信號,再通過判斷邏輯選擇出可靠的導葉位置傳感器信號。“高選”邏輯控制結構如圖3所示。

圖3 “高選”邏輯控制結構圖Figure 3 “High selection”logic control structure diagram
該機組每套導葉位置傳感器信號輸入采集板,首先通過調速器控制程序進行模擬量越限故障判斷(電流型4~20mA),對于4~20mA模擬量通道,均可以采用越限判斷[7]。這種方法比較簡單、有效,但需要防止外部干擾影響判斷的結果。其次,在調速器控制程序中對2套導葉位置傳感器信號采樣值采用高選邏輯,最終輸出采樣值較大的導葉位置傳感器信號供3個控制器使用。為防止1號和2號導葉位置傳感器信號采樣值出現較大偏差,該調速器程序在進行兩路信號高選時,增加了差值判斷,即當1號和2號導葉位置傳感器采樣值偏差大于3%時,調速器報“1號、2號導葉位置偏差過大”,并將調速器切至純手動模式,維持導葉開度不變,“高選”邏輯框圖如圖4所示。
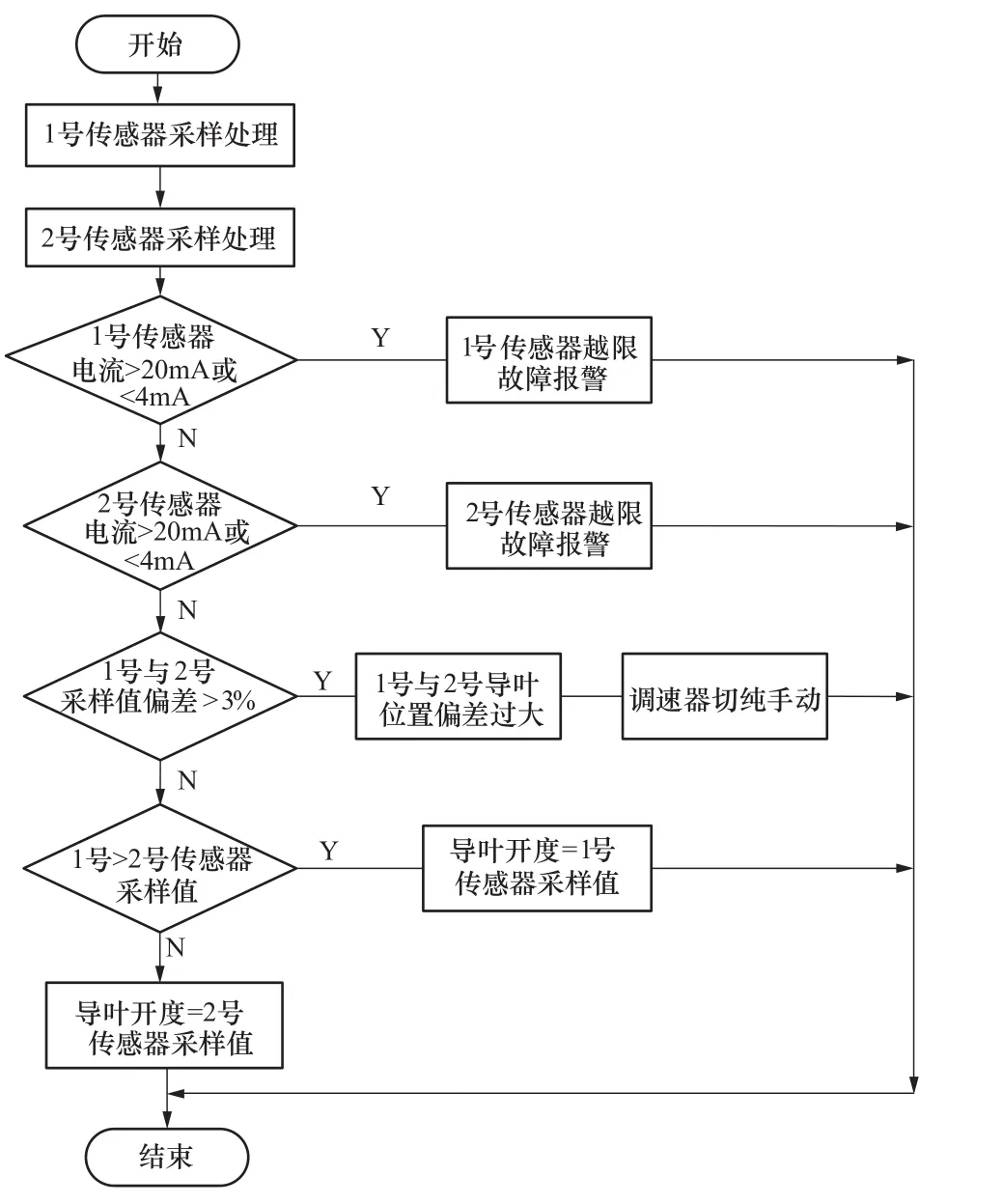
圖4 “高選”邏輯框圖Figure 4 Logic block diagram of“high selection”
該導葉位置傳感器信號選擇判斷邏輯簡單,實現方式簡便,信號輸出結果由兩套傳感器“高選”獲得,傳感器不存在主備關系、完全對等,對于輸入、輸出冗余結構較高的控制系統,該選擇邏輯可行。但如果其中一路傳感器故障或傳感器連桿滑塊脫落時,調速器控制器會鎖存故障前傳感器采樣值,并繼續維持當前運行狀態,直至2套傳感器采樣值偏差大于3%,調速器才切至純手動模式。當2套傳感器線性度較差或響應特性不一致時,“高選”邏輯輸出結果會出現小幅跳變,尤其是在機組開機或停機等導葉快速變化過程中。
3 “一對一”控制邏輯
該類機組調速器控制器采用2套貝加萊2005系列PCC雙機冗余系統,電液轉換單元采用非對稱結構,其中A機控制比例閥,B機控制步進電機,組成雙電液轉換器冗余結構。機組共配備2套導葉位置傳感器,其中A套導葉位置傳感器供調速器A機使用,B套導葉位置傳感器供調速器B機使用,并對采樣值進行差值與反饋變化速度判斷[8]。“一對一”邏輯控制結構如圖5所示。
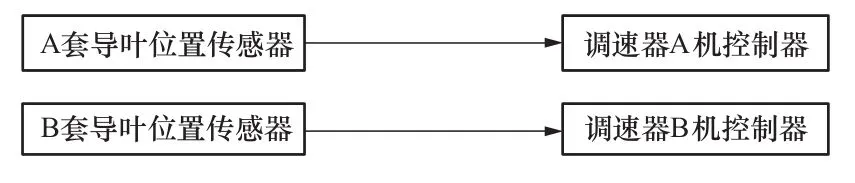
圖5 “一對一”控制結構圖Figure 5 “One to one”control structure diagram
該機組每套導葉位置傳感器信號輸入調速器,首先由調速器控制程序進行模擬量越限故障判斷(電流型4~20mA),其次控制器程序中還對每套導葉位置傳感器信號采用差值與反饋變化速度進行比較,該差值為導葉給定與導葉位置傳感器反饋值進行比較,同樣,在調速器程序中增加了對導葉位置傳感器信號采樣值濾波及其波動異常的判斷邏輯,通過上述方法,可以有效地判別出每套導葉位置傳感器的運行情況。當判別出傳感器本體損壞時,需調速器A、B機切換來消除故障傳感器的影響,為防止此方法誤判,一般將其條件放寬,但這會在一定程度上犧牲響應速度。“一對一”邏輯框圖如圖6所示。

圖6 “一對一”邏輯框圖Figure 6 “One to one”logic block diagram
4 導葉位置傳感器信號故障分析
4.1 故障現象
電站某機組處于負載態功率模式運行,監控系統報:“機組接力器傳感器A、B套偏差大”,隨即復歸。機組有功功率設定666MW,實際有功功率在647~671MW之間波動,趨勢數據如圖7所示。運行人員現場檢查發現,A套導葉位置傳感器連桿萬向節軸套磨損,從緊固螺桿脫落,A、B套導葉位置傳感器滑塊位置出現偏差。

圖7 導葉位置傳感器連桿脫落趨勢分析Figure 7 Analysis on falling off trend of connecting rod of guide vane position sensor
根據原機組導葉接力器位置傳感器高選邏輯,當B套導葉開度小于A套時造成導葉開度保持不變,選取A套導葉開度值,此時進入PID運算的接力器位置反饋值大于實際導葉開度值,與功率給定與功率反饋值作差值后,再進入PID運算,功率模式下的PID框圖如圖8所示。當有功反饋大于有功功率給定,導葉進行回關時,而接力器位置反饋值不變,進入PID運算無法消除差值,導葉無法穩定,繼續回關,直至有功功率給定大于有功反饋,綜合接力器位置反饋值,進入PID運算后,開啟導葉,而接力器位置反饋值保持不變,造成超調,當有功功率反饋大于有功給定,導葉又繼續回關。反復來回調整,最終導致導葉開度波動,有功功率出現“拉鋸”。
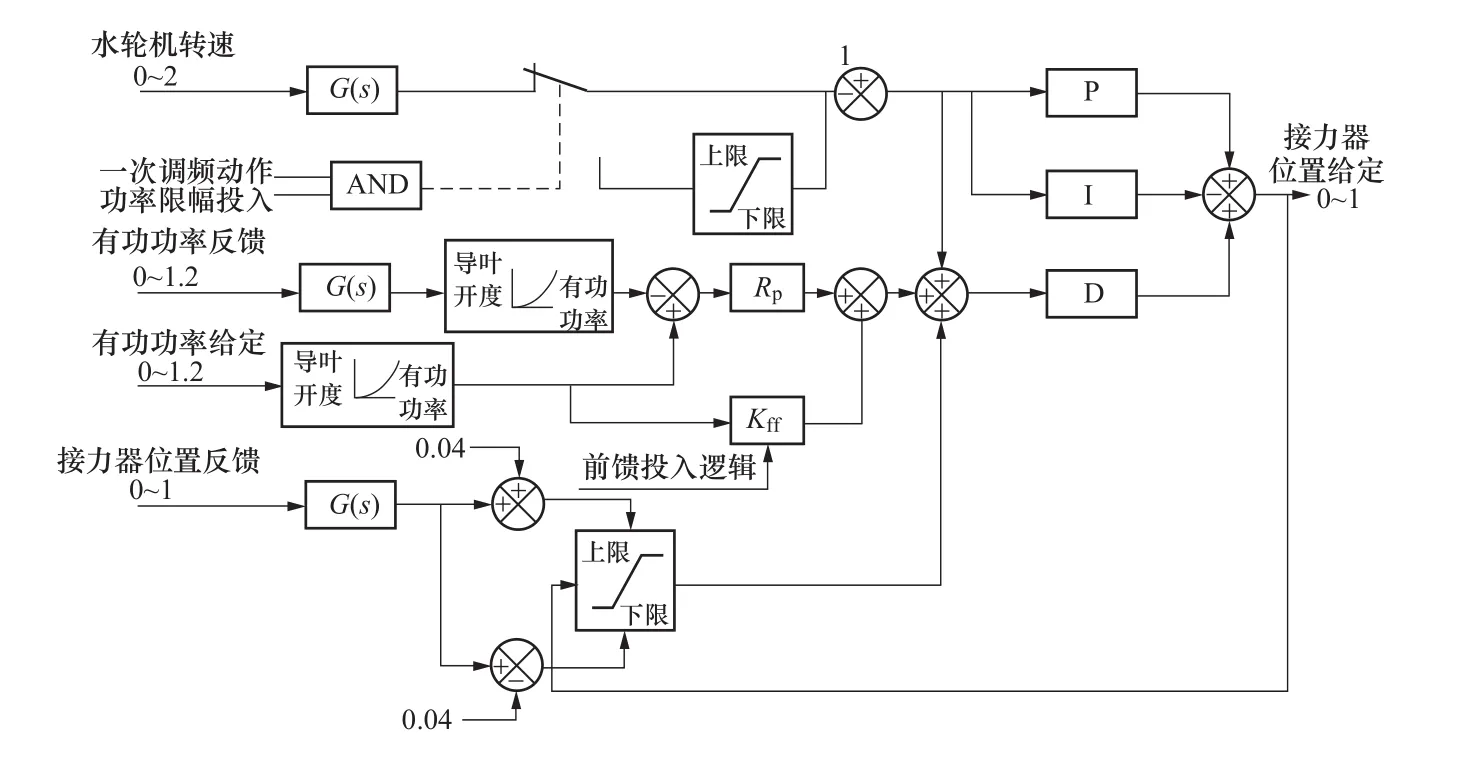
圖8 功率模式下的PID框圖Figure 8 PID block diagram in power mode
上述缺陷應急處理時,嚴禁切開度模式或電手動。因為當控制方式由功率模式切至開度模式或電手動模式后,調速器控制器認為導葉開度閉環仍然正常,結果當導葉回關時,B套導葉開度小于A套,造成導葉開度保持不變假象,開度給定與開度反饋差值一直存在,此時經PID運算后,導葉繼續回關,而此時由于沒有功率閉環的存在,導葉會持續回關,最終造成逆功率停機。當導葉打開時,B套導葉開度大于A套,此時高選邏輯會保證導葉正常動作,導葉開度進行調節時,會有回調可能,當導葉有回關趨勢,且出現導葉開度拒動假象,最終會導致停機。
4.2 邏輯優化
有功功率異常波動故障暴露出了原接力器位置傳感器的選擇邏輯存在一定缺陷,后期對某導葉位置傳感器信號選擇邏輯進行了優化,增加2套導葉位置傳感器信號偏差大于閾值切純手動邏輯,經試驗驗證,該判斷邏輯有效地控制了傳感器滑桿脫落對機組運行的影響。
5 結束語
從上述對各種導葉位置傳感器選擇邏輯的總結及對比分析,機組導葉位置傳感器信號選取,應根據電站的自身特點,選用合適的選擇判斷邏輯,以滿足調速系統對導葉開度、接力器位移等關鍵量的要求,提高重要模擬量的可靠性,重點關注故障狀態下設備運行的穩定性,并盡可能維持機組原有的運行狀態。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34