大懸臂鋼桁梁拖拉施工糾偏技術研究
2021-06-29 10:46:49張京京
交通科技與管理 2021年9期
張京京

摘 要:伴隨著我國高速鐵路迅速發展的需要,鋼桁梁橋在近十年里取得了重大突破和發展,有著廣闊的前景。本文主要進行1-96m單線簡支鋼桁梁橋的糾偏技術研究,在傳統糾偏技術的基礎上,針對鋼桁梁大懸臂狀態下拖拉施工,利用極坐標法同步測量及滾軸式限位滑輪糾偏系統同步糾偏技術,結合現場實際詳細介紹大懸臂鋼桁梁拖拉施工糾偏技術。
關鍵詞:大懸臂;鋼桁梁;拖拉施工;極坐標法;滾軸式限位滑輪;糾偏
0 引言
隨著我國高速鐵路的快速發展,鋼桁梁結構由于具有跨度大、承載能力強、結構輕巧簡潔等特點而被廣泛應用。現行的鋼桁梁拖拉施工由于預拼到就位行程較大,拖拉或頂進過程中極易造成雙側受力不均勻,造成梁體出現偏移軸線的問題,鋼桁梁軸線偏差較大,極易造成支架體系集中受力,是梁體行走過程中支架傾斜或倒塌的主要原因,且鋼桁梁軸線控制不到位,易造成導梁上墩后偏移出滑道,調整困難。現行拖拉施工中軸線控制工法多為采用在梁體端部、中部及尾部設測量點,梁體行走過程中測量梁體實時位置,反推梁體軸線位置。但梁體行走為連續過程,坐標測量完成后需通過后續計算,才能判斷梁體軸線偏移情況,時效性不強,測量完成后,至測量成果完成期間,梁體狀態不可控,數據不能夠實時反映梁體狀態,對軸線調節指導性普遍滯后,且梁體橫向糾偏需在測量成果出具后,停止拖拉施工進行糾偏,影響拖拉工效。為解決軸線控制這一技術難題,降低梁體軸線控制難度,實現行走過程中軸線控制實時性,本文對大懸臂鋼桁梁拖拉施工橫向糾偏技術研究,制定經濟合理、切實可行的施工方案保證大懸臂鋼桁梁拖拉施工軸線精確度。
1 工程概況
濰萊青榮下行聯絡線跨青榮鐵路特大橋58#-59#墩為1-96m單線簡支鋼桁梁,主桁采用無豎桿三角桁,橋梁跨徑為96 m,橋梁寬度為12.65 m,桁高12.3 m,節間長度12 m。斜交上跨既有青榮鐵路,線路坡度-21.1‰。兩端引線為現澆鋼筋混凝土梁橋,拖拉施工時,配備48 m導梁,全長144 m,拖拉總重達2 500 t,拖拉過程中最大懸臂96 m。
2 鋼桁梁橫向糾偏技術
2.1 極坐標系法同步測量
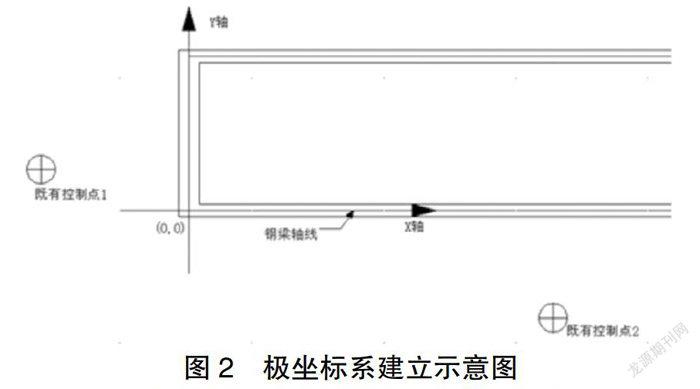
在鋼桁梁每一個節間位置安裝反射貼片,用于全站儀實時觀測數據,利用極坐標系的方法,定義鋼桁梁一側軸線為X軸,垂直軸線為Y軸。原點設置在鋼桁梁尾部軸線上。然后反推既有控制點的極坐標。梁體行走過程中,利用全站儀測量數據,測量成果中X軸數據為梁體行走距離,Y軸數據為梁體實時軸線橫向偏移量,通過此技術,能夠解決鋼桁梁拖拉軸線偏移實時測量及出具行走量成果數據的問題。
(1)施工準備。現場具備拖拉條件,全站儀觀測范圍內無遮擋物,測量人員提前確認既有控制點的精密度是否在允許范圍內。調試全站儀的精密度,并保證全站儀具有備用電池,防止長時間的測量導致電量過低無法觀測。
(2)極坐標計算。利用CAD軟件在圖中畫出鋼桁梁軸線位置,然后定義極坐標系,并定義平行于鋼桁梁一側軸線位置的一條線為X軸,體現鋼桁梁拖拉的行進距離。垂直于軸線的一條線為Y軸,體現鋼桁梁的左右偏移量。定義一個原點(0,0),反推出兩個既有控制點的極坐標。(如下圖所示)
(3)反射貼片布設。在鋼桁梁一側節間位置布設反射片,用于全站儀實時觀測數據使用(反射片水平方向布置,可同步監測梁體撓度情況)。
(4)全站儀架設。事先準備好兩臺全站儀,控制點極坐標提前輸入全站儀內,建站。為避免全站儀與反射片角度較大時導致數據采集不上,全站儀在面對鋼桁梁側面一前一后錯開架設,保證所有時段至少一臺全站儀能夠采集數據。
(5)采集初始坐標。全站儀架設完畢后,測存鋼桁梁側面反射貼片初始坐標,并記錄在表格上。與設計初始值比對,獲取鋼桁梁未拖拉前軸線偏移量。可根據偏移量在拖拉開始時進行糾偏。
(6)拖拉過程控制觀測。在拖拉開始后,全站儀測量模式調整為跟蹤觀測,測量人員隨時調整儀器測量位置,從前往后依次采集數據,并把偏移量及行走距離通過對講機通報給拖拉組,及時進行糾偏。拖拉過程中記錄每組數據用于后期觀測數據變化曲線。在觀測時應重點關注鋼桁梁首尾兩處的反射片,加大觀測頻次。這兩處為軸線偏移量最大的兩組值,及時觀測并通知拖拉組進行糾偏。
(7)拖拉就位。在拖拉就位之前應加大觀測頻次以及降低拖拉速度。此時為精確定位拖拉位置,測量組、拖拉組應密切關注鋼桁梁軸線偏移量及時調整。
2.2 滾軸式限位滑輪糾偏系統同步糾偏
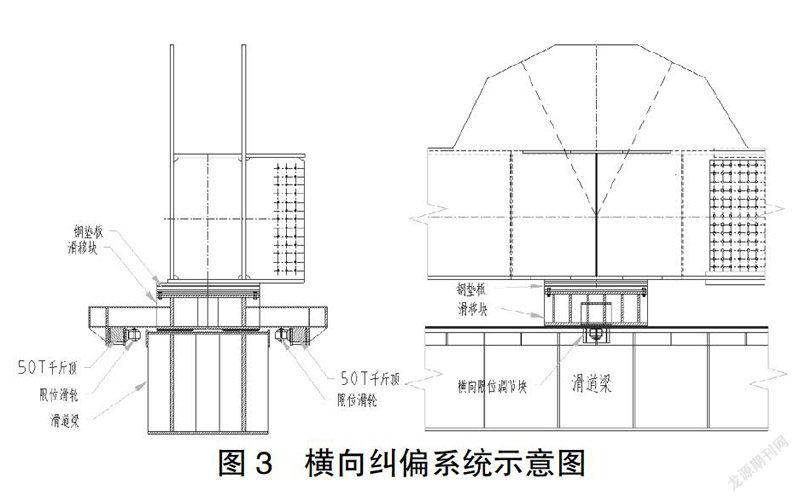
為減小鋼桁梁拖拉施工摩擦力,于鋼桁梁每一個節間位置布設滑塊,鋼桁梁拖拉滑移塊采用鋼板焊接而成,拖拉施工時,滑塊跟隨梁體同步行走。采用50 t液壓千斤頂與滑塊連接為一體,并將千斤頂前端活塞改進為滾軸式限位滑輪,利用千斤頂出頂時與滑道梁產生的反作用力進行橫向糾偏。通過此技術,能夠解決鋼桁梁拖拉施工實時進行橫向糾偏的問題。
(1)縱向距離控制。采用計算機液壓同步控制系統,保證各個千斤頂的位移相等,對平移的實時距離進行測量,當移位至離設計位置剩余約0.2 m時,把移位的速度降至1 cm/分鐘,當離移位距離還剩2 cm時停止移位,對移位的距離進行測量復核,若測量的移位距離誤差在允許范圍內,停止移位;若超過移位的允許誤差,繼續拖拉直至鋼桁梁到達設計位置。
(2)橫向糾偏控制。在鋼桁梁拖拉過程中為了控制橫向軸線偏位,需要設置橫向糾偏系統,橫向糾偏系統采用50 t液壓千斤頂,千斤頂裝置與滑塊連接為一體,千斤頂前端活塞為外螺紋,滾輪套筒采用內螺紋,兩者旋緊連接,依靠千斤頂的頂進實現滾輪橫向頂壓滑道梁達到橫向糾偏的目的,同時滾輪的設置能保持滑塊順利滑動。
3 結論
根據濰萊青榮下行聯絡線跨青榮鐵路特大橋1-96m單線簡支鋼桁梁的設計要求以及現場條件,結合路局針對營業線管理的相關規定,通過對測量技術及同步糾偏系統等的詳細研究,確定了該處鋼桁梁切實可行的大懸臂狀態下糾偏施工技術,不僅保證了施工過程的軸線精確度控制,而且保證了既有高速鐵路的運營安全。
參考文獻:
[1]董亞興,童思賢.大跨度鋼桁梁施工技術研究[J].建筑技術開發,2018(3):230-231.
[2]馮政.鋼桁梁施工技術方案及工藝[J].鐵道建筑,2009(6):1-3.
[3]李平.跨既有鐵路鋼桁梁拖拉施工技術[J].石家莊鐵道大學學報,2012(1):50-52.