雙螺母滾珠絲杠副導程誤差與摩擦力矩關系研究
2021-06-29 10:10:00林煒國張魯超
農業機械學報 2021年6期
關鍵詞:變形
祖 莉 林煒國 張魯超,2 歐 屹 王 凱,2
(1.南京理工大學機械工程學院, 南京 210094;2.數控機床功能部件共性技術工業和信息化部重點實驗室, 張家港 215600)
0 引言
雙螺母滾珠絲杠副通過改變墊片厚度控制滾珠絲杠副預緊力,具有傳動效率高、定位精度好、反向間隙小等優點[1-2],被廣泛應用于數控機床和農業機械傳動與執行系統。但滾珠絲杠存在導程誤差,這直接影響滾珠絲杠副的定位精度和使用性能。摩擦力矩是滾珠絲杠副的重要性能指標之一[3],直接決定滾珠絲杠副的使用情況。因此,不可忽視導程誤差對滾珠絲杠副摩擦力矩的影響。
滾珠絲杠副摩擦力矩的計算多從預緊力計算入手。胡建忠等[4]通過坐標變換計算了雙螺母滾珠絲杠副的軸向預緊力;崔高尚等[5]分析了雙螺母滾珠絲杠副預緊力與墊片預緊量的關系;ZHOU等[6]基于經驗公式提出新的摩擦力矩計算模型;王恒等[7]分析了反向器對摩擦力矩的影響。上述研究將滾珠視為受力相同,且未考慮導程誤差的影響,而實際情況并非如此。
為準確描述各滾珠受力情況需對滾珠絲杠副進行載荷分析。MEI等[8]分析了絲杠、螺母變形以及幾何誤差對載荷分布的影響;劉暢等[9]分析了加載前后滾珠接觸角的變化;CHEN等[10]通過載荷計算發現,相位角不同的滾珠,其載荷分布情況也不同;ZHEN等[11]基于載荷分布計算了滾珠絲杠副的疲勞壽命;基于文獻[11]理論,LIN等[12]、ZHAO等[13]研究了考慮傾覆扭矩和滾道形狀誤差的滾珠載荷分布;BERTOLASO等[14]通過試驗測量了滾珠接觸角與接觸載荷,但將各滾珠視為均勻受力,導致測量存在偏差;DU等[15]通過測量接觸剛度間接反映滾珠變形量。上述對載荷分布的研究著重于滾珠變形和受力,忽略了尺寸誤差尤其是絲杠導程誤差對載荷分布和接觸角的影響,同時,對載荷分布結果缺乏試驗驗證。
本文基于載荷和變形協調理論,分析導程誤差對載荷分布的影響,通過分析提出雙螺母滾珠絲杠副導程誤差與摩擦力矩的關系模型,對不同精度等級絲杠的導程誤差進行測量,并將各絲杠分別與同一套螺母、墊片、滾珠裝配組成絲杠副,測量其摩擦力矩,并進行試驗驗證。
1 導程誤差對載荷分布的影響
1.1 載荷分布模型
圖1為墊片式雙螺母滾珠絲杠副,墊片使左右螺母軸向移動進而擠壓滾珠發生形變,產生預緊力,調整墊片厚度可改變預緊力。導程誤差為滾珠絲杠單個導程的實際長度與理論長度的差值,圖2為滾珠絲杠導程誤差曲線,反映包含多個導程的一段行程內的導程誤差之和,由于各導程誤差有一定的波動性,通過直線擬合得到平均導程誤差ET,ET的斜率即為滾珠絲杠導程誤差ΔPh。為克服工作過程中由溫度升高或負載引起的軸向伸長[16],導程誤差一般小于0。
圖3為雙螺母滾珠絲杠副受力分析圖,只承受預緊力時,左右螺母受力大小相等方向相反,均為FP,進行載荷分析時,可將左右螺母看作2個單螺母滾珠絲杠副進行受力分析,本文以右螺母為研究對象。以滾珠絲杠副常見的受力方式(絲杠軸受拉,螺母固定在基座上受壓)為例,如圖4所示,設加在滾珠絲杠軸上的軸向力為Fa,將第i-1個滾珠和第i個滾珠與絲杠、螺母接觸點之間的絲杠、螺母部分分別稱為絲杠和螺母的第i個單元,Fsi和Fni分別為絲杠、螺母第i個單元受到的軸向力。ΔLsi和ΔLni分別為絲杠和螺母第i個單元的軸向長度,不考慮導程誤差時有
ΔLsi=ΔLni=Ph/Z
(1)
式中Ph——絲杠導程
Z——單圈滾道有效承載滾珠數
由赫茲接觸理論及標準ISO 3408-4[17]得滾珠絲杠副軸向力平衡方程為
(2)
其中
(3)
(4)
式中Fai——各滾珠所受軸向力
cE——材料常數,對于滾珠的材料軸承鋼,取0.464 3
Qi——第i個滾珠與滾道接觸點的法向力
δni——第i個滾珠與滾道的法向接觸變形量
α——螺母螺旋升角
ck——剛度系數
αi——滾珠與滾道接觸角
λ——絲杠螺旋升角
N——有效承載滾珠數
Ys、Yn——絲杠、螺母赫茲接觸理論第一類和第二類橢圓積分的輔助值
ρs、ρn——滾珠-絲杠滾道、滾珠-螺母滾道接觸點處的曲率半徑倒數
rb——滾珠半徑
frs、frn——絲杠、螺母滾道適應比
rm——滾珠絲杠公稱半徑
由圖4可得絲杠和螺母第i個單元受到的軸向力為[18]
(5)
絲杠、螺母單元軸向變形量Δsi、Δni為[8]
(6)
式中Es、En——絲杠、螺母彈性模量
As、An——絲杠、螺母橫截面積
ΔL——相鄰兩滾珠之間的絲杠或螺母部分沿軸向的長度
滾珠、螺母受到壓力,絲杠受到拉力且三者均發生彈性變形,根據滾珠和絲杠螺母接觸關系,把第i、i-1個滾珠,螺母和絲杠軸沿螺旋角方向接觸狀態放大,如圖5所示,可得到滾珠絲杠副第i單元絲杠、螺母、滾珠三者在軸向載荷下變形協調關系
(7)
化簡得
(8)
式中δai、δai-1——第i、i-1個滾珠和滾道的軸向接觸變形量
整理可得
(9)
化簡得
(10)
其中K={[(EsAs)-1+(EnAn)-1]Ph/Z}-1
(11)
圖6為第i個滾珠受力變形圖,Os、On、Ob分別為滾珠受力變形前絲杠滾道、螺母滾道、滾珠曲率中心,O′n、O′b分別為滾珠受力變形后螺母滾道、滾珠的曲率中心,As、A′s與Bn、B′n分別為滾珠變形前后與絲杠、螺母滾道的接觸點,rs、rn分別為絲杠、螺母滾道曲率半徑,計算式為
(12)
滾珠的法向變形量與接觸角為
(13)
式中α0——初始接觸角
1.2 載荷分布結果
對3210型內循環墊片式雙螺母滾珠絲杠副進行載荷分析,預緊載荷4 000 N,由于左右螺母受力狀態相同,對右螺母進行仿真分析,參數如表1所示。

表1 滾珠絲杠參數
根據國標GB/T 17587.3—2017要求,滾珠絲杠的精度由P1~P5逐漸降低,P5級時有效行程550~630 mm的絲杠對應導程誤差為±32 μm,相當于55~63圈滾道的導程誤差為±32 μm,平均每圈滾道導程誤差ΔPh約為±0.5 μm,相應地,P4~P1級精度對應的導程誤差ΔPh分別為±0.4 μm、±0.3 μm、±0.2 μm、±0.1 μm,因此,導程誤差ΔPh須在-0.5~0.5 μm范圍內進行精度等級劃分。
圖7、8為各滾珠接觸角、接觸載荷仿真結果,導程誤差直接導致接觸角以及載荷分布的不均勻,誤差越大分布越不均勻;滾珠絲杠導程誤差ΔPh<0時,絲杠滾道與螺母滾道之間的間隙減小,滾珠被擠壓,隨著滾珠編號的增加,絲杠和螺母滾道之間的偏移越大,滾珠和滾道擠壓變形也越大,導致載荷分布呈現上升趨勢;ΔPh>0時,絲杠滾道與螺母滾道之間的間隙增加,滾珠變形量減小,隨著滾珠編號的增加,絲杠和螺母滾道之間的間隙越大,滾珠和滾道擠壓變形越小,載荷分布呈現下降趨勢。
表2為滾珠軸向接觸變形量總和與絲杠、螺母彈性變形量總和的仿真結果對比,∑δai為滾珠軸向接觸變形量總和,∑(Δsi+Δni)為絲杠與螺母彈性變形量總和。
由表2可知,絲杠與螺母彈性變形量總和遠小于滾珠軸向變形量總和,占比0.149 0%~0.167 7%,因此,分析滾珠載荷分布時可忽略絲杠、螺母的彈性變形量影響進行簡化計算,仿真結果如圖9所示。

表2 滾珠軸向接觸變形量與絲杠、螺母彈性變形量仿真結果對比
由圖9可知,不考慮絲杠、螺母彈性變形以及其他誤差時,各滾珠的軸向變形量呈線性分布,且導程誤差ΔPh=0時,各滾珠軸向變形量相同。因此,忽略絲杠、螺母彈性變形量計算各滾珠載荷分布情況時,設第1個滾珠變形量為δa1,則各滾珠軸向變形量為
δai=k(i-1)+δa1
(14)
只需計算第1個滾珠的軸向變形量以及各滾珠之間的幾何關系即可計算各滾珠的軸向變形量,將極大地簡化計算模型,提升計算速度。
2 導程誤差與摩擦力矩關系模型
不考慮其他誤差影響,滾珠絲杠導程誤差ΔPh=0時,各滾珠之間的軸向距離Pa=Ph/Z,根據載荷分布結果,各滾珠受力相等,當墊片厚度使各滾珠與絲杠滾道剛好接觸時,此時各滾珠接觸變形量為0,預緊力FP0=0,當墊片厚度增加,左右螺母會左右偏移,設偏移量為σa,預緊力為FP,各滾珠受力狀態相同,如圖10所示。
對單個滾珠的變形量進行分析,如圖11所示,σa為螺母滾道曲率中心偏移量,則各滾珠的變形量σn、接觸角αP、接觸力QP為
(15)
則滾珠絲杠副預緊力為
FP=NQPsinαPcosλ
(16)
如圖12所示,當m圈滾道的平均導程誤差為ET(ET<0),單一滾道的導程誤差為ΔPh=ET/m,則各滾珠之間的導程誤差為ΔPa=|ET/(mZ)|以及軸向距離為Pa-ΔPa;設L0為無誤差時左右螺母第1顆滾珠的絲杠曲率中心與兩螺母中間平面的距離,ΔPh<0時,設第1個滾珠絲杠曲率中心的軸向偏移量為a,則第i個滾珠的絲杠滾道曲率中心的沿絲杠軸線的軸向偏移量為
ΔLi=(i-1)ΔPa+a
(17)
對第i個滾珠的變形量進行分析,如圖13所示,ΔPh<0時,滾珠軸向變形量δai為
δai=σa+ΔLicosλ=σa+[(i-1)ΔPa+a]cosλ
(18)
法向變形量δni及接觸角αi為
(19)
同理可得,ΔPh>0時
(20)
則滾珠絲杠副預緊力為
(21)
文獻[6]提出的摩擦力矩計算模型為
(22)
式中μ——摩擦因數
式(22)將滾珠絲杠副各滾珠受力和接觸角視為定值,并未考慮由誤差或者變形引起的接觸角的變化,使得摩擦力矩計算值與實際存在誤差;基于該模型,進行單個滾珠的受力分析,第i個滾珠預緊力與螺母、絲杠的摩擦力矩的關系為
(23)
由于雙螺母內的滾珠載荷分布情況相同,則絲杠副的摩擦力矩為兩個螺母摩擦力矩之和,即
(24)
綜上所述,滾珠絲杠副導程誤差與摩擦力矩的關系模型為
(25)
通過計算以及查找廠家手冊可知,墊片剛度為75 000~85 000 N/μm,滾珠絲杠副的軸向預緊力為3 000~6 000 N,則由軸向預緊而導致的墊片彈性變形量為0.035~0.08 μm,遠小于滾珠變形量,在此忽略不計,因此,相同型號且墊片厚度相同的雙螺母滾珠絲杠副其螺母滾道曲率中心偏移量σa相等,同時,螺母與墊片直接接觸,則左右螺母的滾道曲率中心偏移量σa不會隨著滾珠絲杠的導程誤差發生變化。
3 試驗與結果分析
3.1 試驗臺
為了驗證本文的模型,通過滾珠絲杠副行程誤差、摩擦力矩試驗臺測量導程誤差以及摩擦力矩。圖14為滾珠絲杠副行程誤差試驗臺,該試驗臺由伺服電機、氣浮工作臺、激光位移傳感器和圓光柵組成。伺服電機驅動絲杠旋轉,工作臺由氣浮支撐,可沿軸向無阻力平穩移動,工作臺安裝有可與絲杠滾道嚙合的球形測量頭。絲杠旋轉帶動工作臺軸向移動,激光位移傳感器通過采集工作臺的軸向位置測量絲杠的實際軸向位置,而圓光柵通過采集絲杠的角度位置變化計算出絲杠的理論軸向位置,實際軸向位置與理論軸向位置的差值即為絲杠導程誤差。
圖15為滾珠絲杠副摩擦力矩試驗臺,該試驗臺由伺服電機、工作臺、一對滾動直線導軌和力傳感器組成。伺服電機驅動絲杠旋轉,工作臺裝有可與絲杠滾道嚙合的支撐座,使絲杠在無附加力的條件下帶動工作臺沿直線導軌軸向移動。滾珠絲杠副螺母法蘭裝有螺栓,伸出法蘭端面的螺栓與力傳感器接觸,通過軟件計算得到滾珠絲杠副的摩擦力矩。
3.2 試驗流程
圖16為試驗流程圖,在不安裝螺母的情況下,測量一系列不同精度等級絲杠的導程誤差,將各絲杠分別匹配同一套螺母、墊片、滾珠組成絲杠副,更換絲杠而不更換螺母、墊片、滾珠,根據ISO(3408—5:2006)測量各絲杠與螺母組成絲杠副的摩擦力矩,絲杠、螺母、滾珠、墊片相關參數如表3所示。

表3 絲杠、螺母、滾珠、墊片參數
常溫下絲杠的導程誤差一般都小于0,在實際加載工況下,不同加工精度的絲杠在一定溫升之后會存在熱伸長導致導程誤差大于0;但由于行程誤差和摩擦力矩試驗臺需在20℃恒溫條件下完成測量,無法針對熱伸長后的絲杠進行測量,因此,考慮到試驗的可操作性,本文只對導程誤差小于0的多種情況進行驗證分析。
3.3 試驗結果與分析
存在導程誤差時,螺旋升角為
λ′=arctan((Ph+ΔPh)/(2πrm))
(26)
本次試驗中,測得滾珠絲杠副導程誤差ΔPh為-0.612 3~-0.128 7 μm,則螺旋升角變化范圍為5.680 3°~5.680 5°,變化微小,忽略螺旋升角的變化。
根據滾珠絲杠的導程誤差及摩擦力矩可求出左右螺母的滾道曲率中心偏移量σa,σa不會隨著導程誤差的變化而變化;第1顆滾珠接觸位置的絲杠曲率中心距離兩螺母中間平面的軸向偏移量a為第1個滾珠接觸的絲杠滾道曲率中心距離兩螺母中間平面的滾道數n與導程誤差的乘積,即a=nΔPh,設a1=σa+acosλ,則此時滾珠法向變形量與接觸角為
(27)
當墊片厚度一定時,滾道數n不發生變化,則a、a1與導程誤差呈線性關系。根據試驗結果計算a1,如圖17所示,經直線擬合得:a1=2.569ΔPh+3.187,則試驗絲杠組成的絲杠副第1顆滾珠的軸向偏移量a=2.569ΔPh/cosλ=2.582ΔPh,螺母滾道曲率中心偏移量σa=3.187 μm。
表4為摩擦力矩、預緊力的試驗數據與理論計算數據對比,各絲杠的導程誤差均小于0,摩擦力矩的理論計算值與試驗值的相對誤差不大于8.79%,理論模型與實際摩擦力矩的一致性較好。
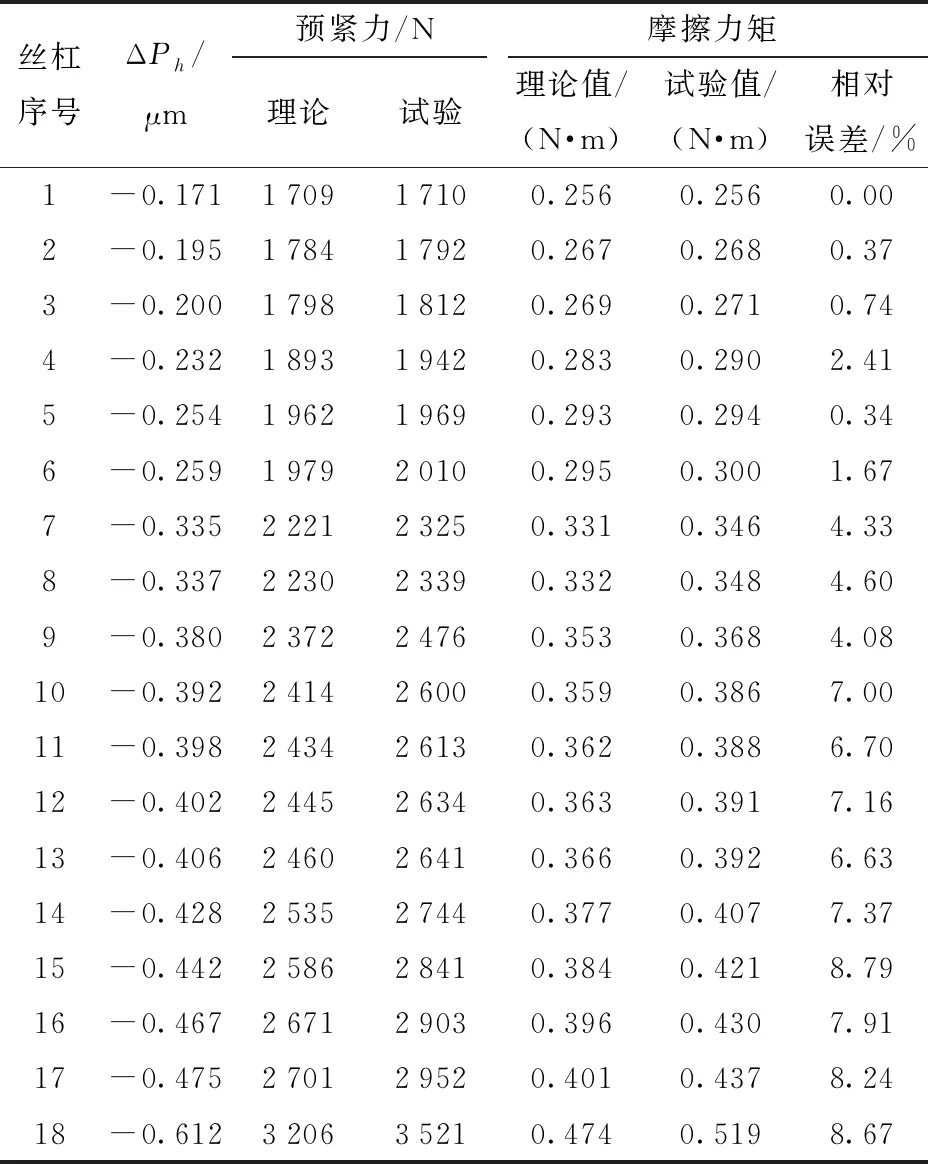
表4 摩擦力矩和預緊力試驗數據與理論計算數據
圖18、19分別為摩擦力矩、預緊力與導程誤差關系曲線。由圖18、19可知,通過本文模型計算的預緊力、摩擦力矩更接近試驗測量值,而文獻[6]的計算值與試驗測量值相差較大;結合表5,文獻[6]模型計算的摩擦力矩誤差為11.75%~54.69%,而本文模型計算摩擦力矩的相對誤差范圍為0~8.79%,表明計算摩擦力矩時,未考慮導程誤差以及滾珠變形引起的接觸角變化,且將各滾珠視為受力相同,會產生較大誤差。
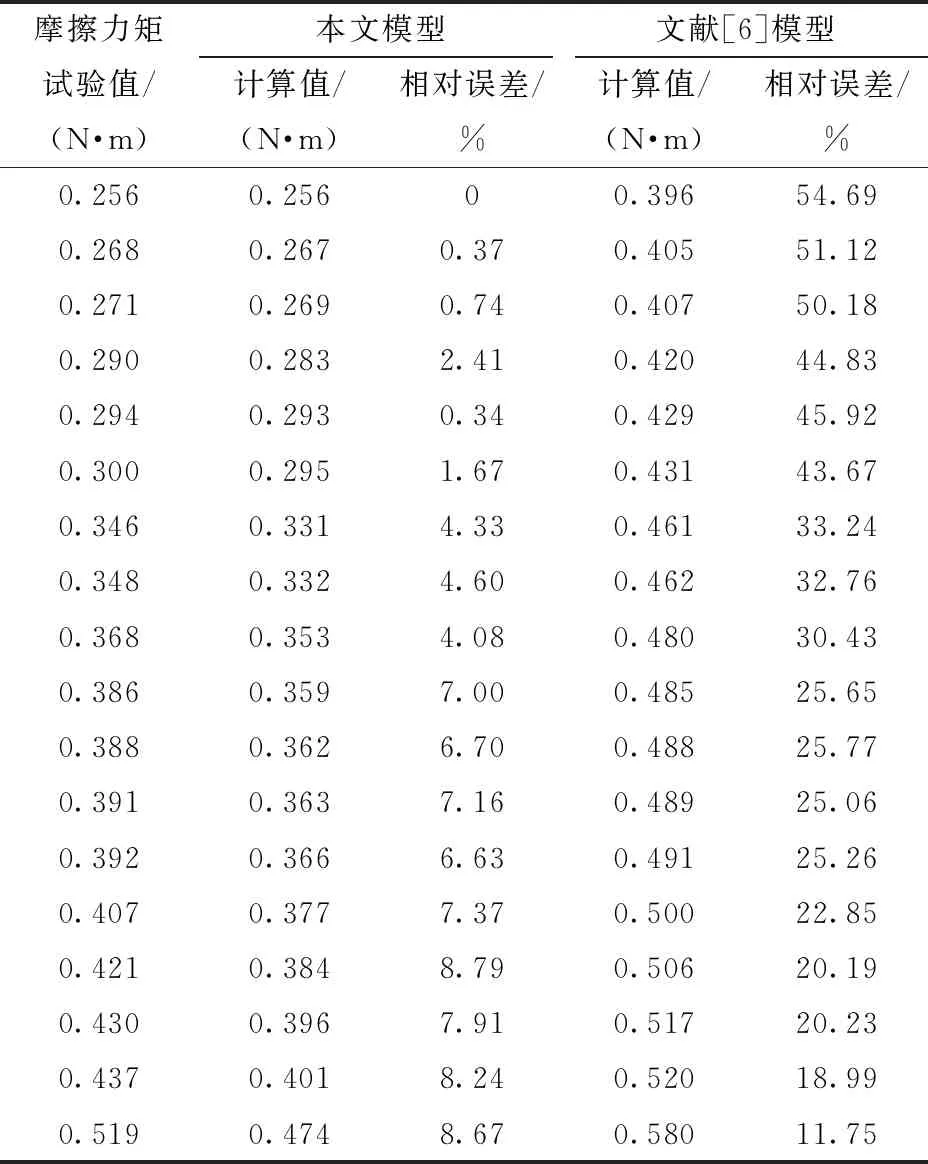
表5 本文模型、文獻[6]模型計算摩擦力矩相對誤差對比
綜合對比表4、5以及圖18、19,雙螺母滾珠絲杠副的預緊力以及摩擦力矩均會隨著導程誤差的增加而加大,且近似于線性相關。本文理論計算的摩擦力矩值與測量值之間的相對誤差隨著導程誤差的增加而增加,而文獻[6]則呈相反趨勢。這是由于滾珠的接觸角隨著導程誤差的增加而減小,摩擦力矩隨著接觸角的減小而增大,但由于絲杠螺母存在彈性變形,使得本文模型計算的接觸角與實際值存在偏差,絲杠導程誤差越大,絲杠螺母彈性變形量越大,接觸角計算值與實際值差值越大,導致本文模型的摩擦力矩計算值與試驗值的相對誤差出現增大的趨勢;而文獻[6]計算摩擦力矩時,將各滾珠的接觸角視為常數45°,導致摩擦力矩計算值與導程誤差的斜率小于試驗值與導程誤差的斜率,使得文獻[6]摩擦力矩計算值相對誤差出現減小的趨勢。但是依據國標GB/T 17587.3—2017,滾珠絲杠副導程誤差允許值在-0.500 μm以內,因此本文模型的相對誤差最大值為8.79%,優于文獻[6]模型,驗證了本文模型的有效性。
4 結論
(1)通過對只承受預緊載荷的雙螺母滾珠絲杠副進行載荷分布分析發現,導程誤差直接導致接觸角、載荷分布的不均勻,誤差越大,分布越不均勻;滾珠絲杠導程誤差小于0時,絲杠滾道與螺母滾道之間的間隙減小,滾珠被擠壓,滾珠編號遞增,絲杠和螺母滾道之間的偏移越大,滾珠和滾道擠壓變形也越大,導致載荷分布呈上升趨勢;導程誤差大于0時,載荷分布呈下降趨勢。
(2)在不考慮絲杠、螺母彈性變形及其他誤差時,各滾珠的軸向變形量呈線性分布,只需計算第1個滾珠的軸向變形量和各滾珠之間的導程誤差即可得出各滾珠的軸向變形量,進而計算預緊力與摩擦力矩。
(3)雙螺母滾珠絲杠副左右螺母的滾道曲率中心軸向偏移量σa與墊片厚度有關,第1個滾珠接觸的絲杠滾道曲率中心至兩螺母中間平面的軸向偏移量a與導程誤差線性相關,σa與a可通過導程誤差與摩擦力矩擬合求出。
(4)試驗表明,摩擦力矩與導程誤差呈線性關系,摩擦力矩實際值大于理論計算值,這主要因為螺母內滾道導程誤差使滾珠的變形量較計算值偏大,摩擦力矩理論值與實際值相對誤差不大于8.79%。
(5)對比本文模型和文獻[6]模型發現,文獻[6]模型摩擦力矩計算值的相對誤差范圍為11.75%~54.69%,而本文模型摩擦力矩計算值的相對誤差范圍為0~8.79%,相對誤差明顯減小。這表明在計算摩擦力矩時,不考慮導程誤差和滾珠變形引起的接觸角變化,且將各滾珠視為受力相同,會產生較大誤差,從而驗證了本文模型的有效性。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36