基于STM32的智能搬運機器人的研究與設(shè)計
2021-06-28 12:23:46姚思嘉劉蕓邵銘旭王鵬家
電子測試 2021年2期
姚思嘉,劉蕓,邵銘旭,王鵬家
(北京信息科技大學(xué)機電工程學(xué)院,北京,100192)
0 引言
在中國,60歲以上的老年人口已經(jīng)超過2億。預(yù)計到2030年,老年人口可達(dá)4億,養(yǎng)老問題日趨嚴(yán)峻,中國對護(hù)理人員需求約增加到兩千萬人次。由于護(hù)理老年人的工作量大,護(hù)理人員較少,尋找護(hù)理人員極為困難。研制養(yǎng)老服務(wù)機器人代替人工輔助老年人進(jìn)行一些基本抓取活動,可有效緩解家庭負(fù)擔(dān),減輕護(hù)理市場人員短缺的壓力,提升老年人的生活質(zhì)量,保障社會的穩(wěn)定發(fā)展[1]。目前市場上的服務(wù)類機器人多用于工廠方面,本文設(shè)計了一種操作簡單、智能性高、能適應(yīng)多種操作環(huán)境,基于STM32單片機,輔助老年人日常行為活動的智能搬運機器人。
1 總體結(jié)構(gòu)設(shè)計思路
機器人系統(tǒng)的總體架構(gòu)如圖1所示,系統(tǒng)以STM32單片機[2]為主控,機器人主要由傳感器系統(tǒng)、步進(jìn)電機驅(qū)動裝置、行進(jìn)機構(gòu)等模塊組成。通過裝載的超聲模塊,可以得到機器人與障礙物的距離,實現(xiàn)自主避障。紅外模塊對超聲模塊的測量死區(qū)進(jìn)行補償,傾角模塊感知機器人的方位角度,輔助運動裝置運行,保障機器人的平穩(wěn)行進(jìn)。

圖1 總體架構(gòu)
2 智能搬運機器人設(shè)計
2.1 行進(jìn)機構(gòu)設(shè)計
執(zhí)行機構(gòu)相對應(yīng)的機械結(jié)構(gòu)是機器人的行走裝置,負(fù)責(zé)接收控制核心的命令,驅(qū)動機器人進(jìn)行智能循跡,超聲避障等操作。行走機構(gòu)共有兩種設(shè)計方案,均可滿足控制需求。
(1)方案一輪式行走結(jié)構(gòu)
輪式行走機構(gòu)運行過程中,自身需要消耗一定的功率,一部分功率用于克服摩擦阻力,另一部分消耗在滑轉(zhuǎn)上。四輪行走機構(gòu)加裝在機器人的機體下,提高了機器人的承載能力,其機械結(jié)構(gòu)相對簡單,易于控制。輪式行走機構(gòu)的結(jié)構(gòu)簡圖如圖2所示。

圖2 輪行走機構(gòu)
(2)方案二履帶行走機構(gòu)
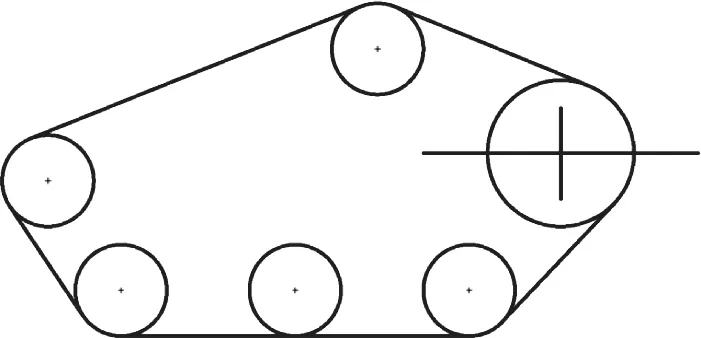
圖3 輪履行走機構(gòu)
相對于輪式行走機構(gòu),履式行走機構(gòu)更為復(fù)雜。履式行走機構(gòu)將輪子與機構(gòu)相結(jié)合,可實現(xiàn)在復(fù)雜環(huán)境的穩(wěn)定行駛。在復(fù)雜路面情況下正常工作,履式行走機構(gòu)越障能力相比輪式更優(yōu)越,具有較強的結(jié)構(gòu)化適應(yīng)力。履式行走機構(gòu)的結(jié)構(gòu)簡圖如圖所示。
通過對比分析優(yōu)劣,機器人的行走機構(gòu)設(shè)計采用了方案二。
2.2 抓取機構(gòu)
機械臂作為機器人最主要的執(zhí)行機構(gòu)之一,對它的研究是人工智能和機器人學(xué)的重要研究課題。目前,大多數(shù)機器臂都是安裝在固定基座上的,它們的操作范圍十分有限。
智能搬運機器人要求機器臂的抓持器能夠以準(zhǔn)確的位置和姿態(tài)移動到定點,機器人需要具有一定數(shù)量的自由度[3]。自由度是機器人的一個重要技術(shù)指標(biāo),由機器人的結(jié)構(gòu)決定,直接影響機器人的機動性。機械臂能夠?qū)ψ鴺?biāo)系進(jìn)行獨立運動的數(shù)目稱為自由度,機械臂能進(jìn)行運動包括(圖4):
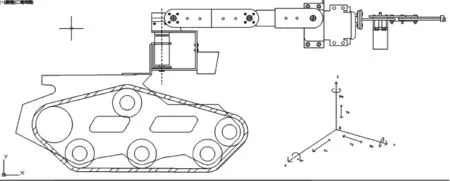
圖4 機械臂自由度
沿坐標(biāo)軸Ox,Oy和Oz的三個平移運動Tx,Ty,Tz;
繞著坐標(biāo)軸Ox,Oy和Oz的三個旋轉(zhuǎn)運動Rx,Ry,Rz。
一般來說自由度越多,機械臂的靈活性越大,通用性越廣,其結(jié)構(gòu)越復(fù)雜。機器臂的自由度是設(shè)計的關(guān)鍵參數(shù),工作空間中機械臂要想達(dá)到任意位姿,自由度數(shù)目應(yīng)該與所要完成的任務(wù)相匹配。
依據(jù)以上條件,抓取機構(gòu)采用了六自由度鏈?zhǔn)疥P(guān)節(jié)。抓取器的三維建模如圖5所示。

圖5 機械抓取裝置
2.3 傳感器模塊
傳感器模塊是機器人的“感知器官”,負(fù)責(zé)采集外部信息,將被測量按照數(shù)學(xué)函數(shù)法則轉(zhuǎn)換成可用信號,提高機器人的自主性。其中搬運機器人的超聲模塊發(fā)出超聲波碰到雜質(zhì)或者分界面會產(chǎn)生顯著反射形成反射回波,碰到活動物體能產(chǎn)生多普勒效應(yīng)。依據(jù)此原理,機器人常采用渡越時間法[4]有效躲避障礙。超聲模塊的工作方式如圖6所示。

圖6 超聲模塊工作方式
機器人裝載的ADXL345傾角傳感器可檢測自身狀態(tài),調(diào)控機械臂實現(xiàn)側(cè)翻恢復(fù)。不同的傳感器收發(fā)裝置共同組成傳感模塊。
2.4 步進(jìn)電機驅(qū)動裝置
主控模塊是機器人的大腦,負(fù)責(zé)處理感知機構(gòu)所收集的外界環(huán)境信息,形成指令下發(fā)給執(zhí)行機構(gòu)。步進(jìn)電機驅(qū)動裝置設(shè)計采用高精度數(shù)字舵機,機器人行進(jìn)發(fā)生堵轉(zhuǎn)時,舵機內(nèi)部自動進(jìn)行保護(hù),調(diào)控履帶的行進(jìn)方式。
3 程序設(shè)計
機器人使用32位基于ARM的微控制器控制,所編譯的程序建立于定義的固態(tài)函數(shù)庫之上,每一個器件的驅(qū)動程序的編寫都在Keil上完成。在程序驅(qū)動下,STM32單片機完成系統(tǒng)初始化,串口與使用工業(yè)標(biāo)準(zhǔn)NRZ異步串行數(shù)據(jù)格式的外部設(shè)備之間進(jìn)行數(shù)據(jù)交換,檢測當(dāng)前運行模式,控制機器人實現(xiàn)超聲避障、定距抓取等功能。機器人采用模塊化編程,功能模塊控制程序編寫成各個功能子程序,分為循跡,抓取,智能跟隨等。
3.1 循跡子程序
在行走環(huán)境和空間結(jié)構(gòu)變化不大的情況下,單片機獲取傳感器傳輸有效信號完成循跡避障。當(dāng)超聲波傳感器檢測到障礙物時,減速慢行,紅外模塊檢測障礙物返回低電平,機器人停止直行調(diào)轉(zhuǎn)方向,精準(zhǔn)調(diào)控行進(jìn)方向,完成規(guī)劃路徑。
3.2 定距抓取子程序
當(dāng)有控制信號傳輸給單片機時,首先鎖定物品,待機器人移動到最佳區(qū)域,輸出停車信號驅(qū)動舵機控制高自由度舵機進(jìn)行抓取。
3.3 智能跟隨子程序
單片機首先將4個IO口初始化為輸入口,通過預(yù)設(shè)代碼確定兩個變量speed1,speed2控制兩條履帶的速度,同時設(shè)置另外兩個變量Ar1、Ar2判斷履帶轉(zhuǎn)向,驅(qū)動機器人完成智能跟隨。電機驅(qū)動函數(shù)配合定時器執(zhí)行,由PWM來控制電機速度。定時器中調(diào)用另一函數(shù),滿足100us調(diào)用一次的條件即達(dá)到1KHz的頻率,就由控制函數(shù)實現(xiàn)超聲模塊和電機裝置的聯(lián)結(jié)。程序通過判斷超聲波距離來確定小車是否前進(jìn)或者后退,不滿足設(shè)定條件則后退,小于則前進(jìn),運行流程如圖7所示。

圖7 智能跟隨流程
4 結(jié)語
本文設(shè)計了一種基于STM32的智能搬運機器人,該機器人可運用于家庭等小空間場合,配合行為困難者完成一些簡單的抓取活動,此種搬運機器人切合當(dāng)今社會需求,對養(yǎng)老助殘機器人的研究設(shè)計具有一定的參考價值和指導(dǎo)意義。分析比較履帶式行走機構(gòu)與輪式行走機構(gòu)的優(yōu)劣,對機器人的履帶行走結(jié)構(gòu)傳動布局進(jìn)行了簡單的運動學(xué)和動力學(xué)分析。簡述機器人機械臂的結(jié)構(gòu)和控制問題。機器人通過傳感器模塊識別路徑、發(fā)現(xiàn)目標(biāo),實現(xiàn)定距抓取,智能循跡等功能,研究了機器人的算法問題。以下是樣機成品圖8。
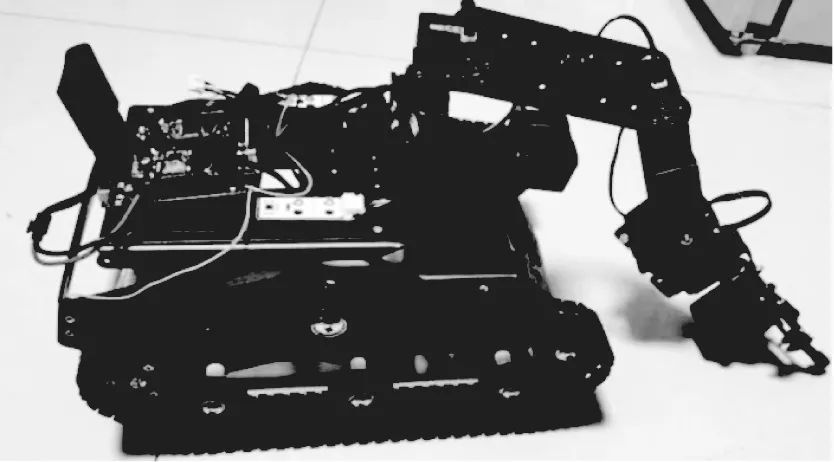
圖8 實物樣機
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
