基于北斗導航的安全監護機器人設計
2021-06-28 08:06:48朱溫涵諸劍鄭陽梁昊達
電子測試 2021年6期
朱溫涵,諸劍,鄭陽,梁昊達
(南京工業大學浦江學院,江蘇南京,210000)
0 引言
目前,國內大多數幼兒園及小學的放學時間在17:00之前。許多家長反應,該時間段常常與工作時間段沖突,如何安全接送兒童這一問題為家長們帶來了很大的負擔。此外,因為孩子對外界的新鮮事物充滿了好奇心,缺乏自我保護能力[1],所以這就給一些不法分子提供了乘虛而入的機會,制造了一系列冒領、錯接、拐騙和綁架等兒童安全事故[2],引起了社會的關注。
為解決上文問題,本文設計了一種基于北斗導航的安全監護機器人,利用創新牽引手環[3]和雙衛星定位技術[4]對兒童進行監護,在語音播報的提醒下,既可讓兒童自行熟悉回家路徑,又能夠讓其監護人隨時掌握兒童所處位置,可用于多種情況下的兒童監護,大大提升了兒童接送的可靠性和安全性。
1 總體設計
該機器人系統共包括STM32F1、ATK1218北斗和GPS信號接收模塊、HX711壓力傳感器及GSM短信模塊等。以STM32F1作為機器人主控板,控制和驅動電機運動,同時對各傳感器、衛星信號模塊所接收到的數據進行處理,并將其呈現在LCD液晶顯示屏上;此外,安全監護機器人在陪同孩童沿指定路線回家時能夠不斷接收導航模塊的經緯度信息從而與設計時所給定的警示界限作比較,當達到報警條件時,語音播報提示兒童沒有沿事先規劃好的路徑回家,同時若孩童超出指定距離較多時機器人將通過GSM模塊向其監護人的指定終端設備發送警示信息及當前經緯度信息,以達到安全監護的功能。
2 硬件設計
為使各模塊能發揮最大用途,且在設計基礎上能為添加各模塊留足相應的空間,故本設計機器人的總體結構采用軟件Solidworks進行三維建模,先繪制各個部分的零件圖再進行整體裝配。在機器人移動部分,使用4個自主定制的直流電機帶動海綿內膽輪運動,能夠有效跨越不平緩的陸地;在信號接收部分,使用北斗導航及GPS雙模塊接收衛星信號,為信號強度提供了保證;在信號發送部分,使用GSM短信模塊向終端發送警示信息;此外,以上各個功能的實現與否均在人機交互界面顯示。
2.1 衛星接收模塊
安全監護機器人地理位置信息采集多數采用全球定位系統定位技術[5],然后利用全球移動通信系統短信息服務實現機器人運動數據的無線遠程傳輸,這種方式結構較復雜。北斗衛星導航系統是中國自行研制的全球衛星導航系統,其不但有定位功能,而且具有報文通信功能[6]。將北斗衛星的導航功能和GPS定位互補使用,可以解決定位信息在關鍵時刻受限制的缺點,也可以解決使用單一定位系統定位不確定的問題。所以應用GPS/北斗導航雙的定位更可靠、數據處理能力更強,也就意味著孩童的安全更容易得到保障。GPS北斗雙衛星定位模塊如下圖1所示。
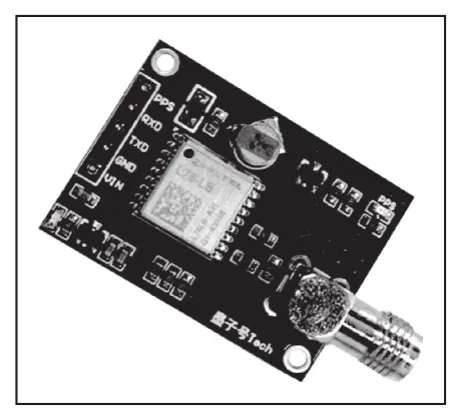
圖1 GPS北斗雙衛星定位模塊
2.2 GSM模塊
本設計機器人采用的GSM模塊是SIMCOM公司推出的一款高性能工業級GSM/GPRS模塊,其SIM800系列設計在官方設計上進行了優化,供電采用了高效開關電源,SIM卡質量更堅固。該模塊支持雙頻,支持短信息、數據通信、語音傳輸等服務,具有體積小、功耗低、集成度高、傳輸速率快等優點。主要通過串口傳輸標準的AT命令對模塊進行控制,進行各種無線通信功能。當接收到報警指令時,GSM模塊立刻啟動,通過基于AT指令的PUD-Model編碼將汽車狀況以文本模式發送至用戶手機上。
2.3 牽引手環的創新設計
本機器人特殊設計牽引手環以解決牽引兒童時舒適度這一問題。在手環材料方面,主材料使用硅膠,TPU等一系列環保,舒適度性、耐用性和防污性能,防水性能都較高的材質;其次在創新方面會加入溫度感受器,心率感受器,來感受孩子在路上的情況以防不測。在外觀方面,為迎合孩子的喜好設計了一系列的卡通圖案,顏色更多樣;在傳感器上,加入了壓力傳感器及溫度傳感器,并在手環上添加密碼鎖以保證孩童的安全。
使用時,只需孩童自行簡單地套上牽引手環即可。其中,溫度傳感器的作用是檢測孩童實時健康狀態,壓力傳感器的作用是當機器人移動時主控板通過壓力傳感器得到的數據對電機速度、運動方向不斷調整。
3 軟件設計
本設計機器人為套上手環后一鍵啟動進行全自動化安全監護。程序中運用中斷較多,而硬件上STM32中斷口的豐富為程序編寫提供了便利。此外各模塊的底層代碼均已開源,修改編寫更為便捷。
當兒童套好手環后,機器人將自行啟動并對所有模塊完成初始化。孩童牽引機器人過程中如若壓力適宜且機器人在事先規定好的經緯度上運行,則正常跟隨,否則語音播報模塊將提醒孩童、短信收發模塊會將報警信息發送至監護人終端,當孩童到達指定經緯度時,監護結束。
4 機器人調試
在本節中,將對安全監護機器人北斗導航模塊與GSM通信的調試過程進行簡要說明。
4.1 北斗導航模塊的調試過程
在本設計中,因為仿真環境下北斗模塊與GPS接收數據無明顯差別,所以采用已有的Virtual GPS進行仿真。在Proteus中搭建好電路,并打開計算機的虛擬串口將其作為理想中衛星向MCU傳遞數據,最終在LCD1602液晶屏上顯示。
由仿真結果可知,LCD屏幕上此刻顯示的是東經119.910166°,北緯29.526313°。經過高德地圖經緯度查詢,此處位于南京工業大學浦江學院溧水校區附近。此外,在翔宇路南地鐵站及南京南站進行了虛擬GPS仿真調試,得到結果如下表1所示。通過查詢,LCD1602上顯示的位置與通過經緯度查詢得到經緯度幾乎相同,故北斗導航模塊仿真結果正確,調試結果較好。

表1 虛擬GPS仿真調試結果
4.2 GSM通信的調試過程
在本次調試中,使用GSM直接與電腦上位機進行通信測試,模塊通過TTL接口與電腦上位機通信,電腦端通過串口發送相應指令,串口助手上顯示對應數據。在本次調試中,向串口調試助手發送了AT+CSQ指令,此指令可查詢北斗導航模塊信號的質量。
由返回的數據得到數值為27,據查閱信號強度最大可返回31,一般大于10即可。故GSM通信的信號較強。
5 總結
本次設計使用STM32作為監護機器人的主控板實現了一套基于北斗導航的安全監護機器人的設計方案。該機器人打破了過往使用GPS的限制改用北斗導航與GPS雙模塊,設計了帶有壓力傳感器的牽引手環。同時還實現了語音提示、短信報警等功能,一定程度上減輕了家長因工作沖突帶來的負擔,解決了接送孩童的安全問題。
猜你喜歡
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:38
雜文選刊(2016年7期)2016-08-02 08:39:56
小天使·一年級語數英綜合(2016年6期)2016-05-14 12:21:05
當代化工研究(2016年6期)2016-03-20 16:21:46
舒適廣告(2008年9期)2008-09-22 10:02:48