基于模糊PID 的高速離心機轉(zhuǎn)子振動控制方法研究
2021-06-27 03:26:04周義桓龔志平薛永
電子設(shè)計工程 2021年12期
周義桓,龔志平,薛永
(江西省贛華安全科技有限公司,江西南昌 330000)
離心機廣泛應(yīng)用于我國生物科研和醫(yī)藥科研中,一方面,離心機利用強大的離心力將標(biāo)本中的液體、固體分離,另一方面,也將標(biāo)本快速合成[1]。離心機的應(yīng)用領(lǐng)域中,實驗過程不容差錯,所以對離心機振動控制尤為嚴(yán)格[2-3]。高速離心機在現(xiàn)代工業(yè)領(lǐng)域具有良好的應(yīng)用市場。離心機一旦啟動,則無法調(diào)節(jié)轉(zhuǎn)子的振動頻率。在一些應(yīng)用中,由于標(biāo)本體積小、難離心,所以實時控制離心機的轉(zhuǎn)子振動頻率尤為重要。基于此,該文基于模糊PID 研究了高速離心機轉(zhuǎn)子振動控制方法。
1 轉(zhuǎn)子振動控制動力學(xué)模型
該文以模糊自適應(yīng)PID 算法為基礎(chǔ)設(shè)計的高速離心機轉(zhuǎn)子振動運行模型由轉(zhuǎn)子、軸承、電磁作用器、圓盤組成,離心器的兩端由兩個軸承進行支撐,即當(dāng)離心器轉(zhuǎn)子振動時,會出現(xiàn)不同程度的彈性。防止標(biāo)本的彈出,設(shè)計兩個軸承進行控制。離心器的轉(zhuǎn)子在運動過程中存在偏心位移。因此文中利用圓盤控制轉(zhuǎn)子的平衡,兩個電磁作用器固定在轉(zhuǎn)子的中心外側(cè),其目的是平衡轉(zhuǎn)子振動的非線性變化[4-5]。具體的基于模糊PID 離心機轉(zhuǎn)子的工作模型如圖1所示。

圖1 基于模糊PID離心機轉(zhuǎn)子工作模型
文中選擇的電磁作用器具有4 個C 型接口結(jié)構(gòu)和8 個定子級接口,每一個C 型接口對應(yīng)兩個定子級接口。如果兩個定子級接口的磁力相反,那么控盤處的轉(zhuǎn)子作用力將成順時針高速運轉(zhuǎn);如果磁力相同,那么轉(zhuǎn)子的作用力就成逆時針降速運轉(zhuǎn)。假設(shè)轉(zhuǎn)子水平和豎直兩方向的作用合力為Fmx和Fmy,同理水平和豎直方向的電磁合力為Fm1和Fm2,則兩個電磁作用器對應(yīng)的離心器轉(zhuǎn)子的動力微分方程如下所示:

其中,m為模型中空盤的質(zhì)量;c為轉(zhuǎn)子運動的阻尼系數(shù);k為轉(zhuǎn)子的彈性剛度系數(shù);w為轉(zhuǎn)子的旋轉(zhuǎn)速度;t為工作時間;e為工作模型中空盤的不均勻質(zhì)量;φ0為離心器轉(zhuǎn)子運動不平衡時的初始相位角[6-7]。
當(dāng)離心機轉(zhuǎn)子振動的位移不為零時,出現(xiàn)位移差并超出設(shè)定值。為了提高轉(zhuǎn)子的運行速度和樣本的利用率,根據(jù)轉(zhuǎn)子振動位移的偏差值,利用模糊PID 算法對轉(zhuǎn)子的振動頻率進行適當(dāng)降低。當(dāng)離心機轉(zhuǎn)子振動的位移偏差值較小時,通過模糊PID 算法,將轉(zhuǎn)子的振動信號放大,降低轉(zhuǎn)子振動速度,從而提高轉(zhuǎn)子振動控制精度[8-9]。
其中水平和豎直方向的電磁合力Fm1和Fm2計算公式為:


其中,Ro為轉(zhuǎn)子空氣的阻力;I0是電源的偏置電流;ix與iy分別是轉(zhuǎn)子水平和豎直方向的控制電流;Km為轉(zhuǎn)子的電磁作用器的特征常數(shù)[10-11]。
離心機轉(zhuǎn)子彈力恢復(fù)力水平和豎直方向的計算公式如下所示:

2 振動控制
模糊PID 控制算法是一種根據(jù)模糊PID 規(guī)則進行模糊推理控制的方法。文中設(shè)計的離心機的模糊PID 控制器由可控制離心機轉(zhuǎn)子振動頻率部分和模糊推理兩部分組成,具體的高速離心機轉(zhuǎn)子模糊控制器結(jié)構(gòu)示意圖如圖2 所示。

圖2 高速離心機轉(zhuǎn)子模糊控制器結(jié)構(gòu)
離心機轉(zhuǎn)子運動的模糊推理部分在一定程度上可以看作控制離心機轉(zhuǎn)子振動頻率的預(yù)處理操作,其主要工作是根據(jù)實際情況,對要完成離心操作的標(biāo)本進行自動調(diào)節(jié)的放大操作,并實現(xiàn)轉(zhuǎn)子、標(biāo)本、電磁作用器的自動校正[12-13]。檢查離心機3 個零件是否水平,PID 模糊推理方法通過離心機轉(zhuǎn)子與標(biāo)本的位移偏差e和位移偏差率E兩個參數(shù)進行對比。其中轉(zhuǎn)子在運行過程中的平衡程度有7 個階段,分別為相對負(fù)大、相對負(fù)中、相對負(fù)小、相對零、相對正小、相對正中、相對正大。雖然轉(zhuǎn)子振動過程中存在7 個階段,但是如果轉(zhuǎn)子振動頻率一直相同,每個階段的振動系數(shù)都相同[14-15]。通過多次實驗研究,總結(jié)出離心機轉(zhuǎn)子在不同階段的模糊區(qū)域范圍如表1所示。
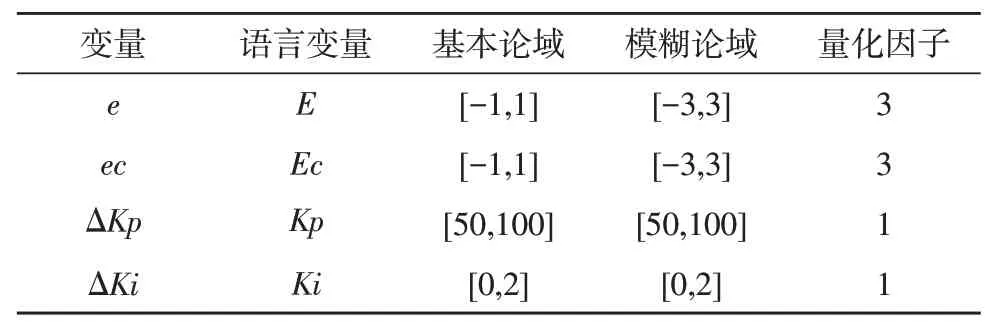
表1 模糊區(qū)域范圍表
模糊PID 的高速離心機轉(zhuǎn)子振動控制部分是根據(jù)離心機運行輸出的電壓大小,來控制轉(zhuǎn)子的電磁鐵感應(yīng)線圈的電流大小,從而在調(diào)節(jié)離心機轉(zhuǎn)子振動頻率過程中,保證轉(zhuǎn)子振動的平衡力,保證離心機轉(zhuǎn)子的正常運行。通過研究離心機轉(zhuǎn)子振動規(guī)律以及實驗經(jīng)驗,發(fā)現(xiàn)離心機轉(zhuǎn)子振動寬度與振動頻率的模糊規(guī)則如圖3 所示。

圖3 位移偏差的模糊定義示意圖
一般情況下,轉(zhuǎn)子的模糊量化因子越接近0,說明離心機轉(zhuǎn)子的振動越穩(wěn)定,此時可以利用模糊PID控制算法對離心機轉(zhuǎn)子運行過程進行安全監(jiān)督[16]。模糊因子越遠(yuǎn)離0,說明轉(zhuǎn)子的振動頻率不穩(wěn)定,這時應(yīng)增加模糊PID 算法對轉(zhuǎn)子的控制程度,保證離心機轉(zhuǎn)子的穩(wěn)定運行。
3 實驗與研究
為驗證基于模糊PID 的高速離心機轉(zhuǎn)子振動控制方法的實際應(yīng)用性能,設(shè)計如下實驗加以驗證。
實驗研究選用激光位移傳感器系統(tǒng)將高速離心機轉(zhuǎn)子振動的位移數(shù)據(jù)由傳感器傳輸至實驗操作空間系統(tǒng)中等待實驗處理。
為更好地驗證文中方法研究的振動控制的性能,選取實驗數(shù)據(jù)集進行仿真實驗操作。由于轉(zhuǎn)子振動控制系統(tǒng)的部分操作數(shù)據(jù)重合,為此,在進行仿真實驗時僅需測量控制數(shù)據(jù)橫向位移的數(shù)值。離心機轉(zhuǎn)子系統(tǒng)運行的過程中,添加幅值為0.15 的階躍信號。
為避免實驗結(jié)果的單一性,將傳統(tǒng)PID 控制方法和基于隸屬度調(diào)整的控制方法作為對比方法,與文中基于模糊PID 的高速離心機轉(zhuǎn)子振動控制方法共同完成性能驗證。
不同方法的數(shù)據(jù)位移響應(yīng)曲線對比結(jié)果如圖4所示。離心機受干擾時的位移響應(yīng)曲線如圖5 所示。在圖4 中,橫軸表示控制時間t,縱軸表示數(shù)據(jù)位移距離。

圖4 數(shù)據(jù)位移響應(yīng)曲線

圖5 受干擾時的位移響應(yīng)曲線
根據(jù)上圖可以看出,傳統(tǒng)PID 控制下的方法研究的數(shù)據(jù)位移響應(yīng)曲線變動頻率較高,對于控制的響應(yīng)程度較差,轉(zhuǎn)子振動穩(wěn)定性低。在隸屬度函數(shù)調(diào)整控制下的高速離心機轉(zhuǎn)子振動控制數(shù)據(jù)位移響應(yīng)曲線變動頻率較先前方法的變動頻率降低,控制的響應(yīng)程度提升,轉(zhuǎn)子振動穩(wěn)定性有所上升。而相較于以上兩種傳統(tǒng)研究,該文設(shè)計的基于模糊PID的高速離心機轉(zhuǎn)子振動控制方法的響應(yīng)曲線的變動頻率較低,控制的響應(yīng)程度較強,轉(zhuǎn)子振動穩(wěn)定性較高。表明該文研究的高速離心機轉(zhuǎn)子振動控制效果最優(yōu)。
產(chǎn)生這一結(jié)果的原因是,該文在振動調(diào)整的過程中選配不同的轉(zhuǎn)子振動控制信號系統(tǒng),利用反饋調(diào)節(jié)系統(tǒng)改善轉(zhuǎn)子振動的頻率,穩(wěn)定其正常轉(zhuǎn)動的轉(zhuǎn)動狀態(tài),選用電磁力描述模型對轉(zhuǎn)子系統(tǒng)周圍的平衡點作出平衡判斷,找出合適的轉(zhuǎn)動位置,并對振動數(shù)據(jù)做線性處理,擴展轉(zhuǎn)子系統(tǒng)的轉(zhuǎn)動空間,減少不必要的操作步驟,提升轉(zhuǎn)子振動的控制有效率。模糊處理系統(tǒng)控制器部分,向處理器中輸入自動校正參數(shù),當(dāng)轉(zhuǎn)子在振動過程中產(chǎn)生異常現(xiàn)象時,通過調(diào)配的參數(shù)可將異常信號及時反饋給控制中心,提升控制的反應(yīng)程度,當(dāng)產(chǎn)生位移偏移時,有效利用轉(zhuǎn)子系統(tǒng)的平衡力,依托電磁鐵線圈的電流通過大小判斷振動的振幅頻率,縮減控制所需頻率,具有較強的控制操作性。
在完成以上驗證后,為進一步驗證不同方法研究的控制誤差率,選用LabVIEW 軟件平臺對轉(zhuǎn)子振動控制系統(tǒng)進行軟件程序調(diào)節(jié),綜合其PID 控制輔助界面將控制信息錄入操作空間中。實驗系統(tǒng)如圖6 所示。

圖6 實驗系統(tǒng)圖
通過仿真信號發(fā)射器生成一個幅值為1.5 dB、頻率為15.2 Hz 的正弦仿真發(fā)射信號,利用PID 控制輔助界面與控制信息采集界面將生成的信號壓縮成模擬振動發(fā)射信號。將振動頻率調(diào)整至同一幅值中,促使轉(zhuǎn)子產(chǎn)生共振現(xiàn)象,并對不受電磁作用器控制的數(shù)據(jù)進行排除,輸出相應(yīng)的圖像,如圖7 所示。

圖7 不受電磁作用器控制的數(shù)據(jù)圖
調(diào)整此時準(zhǔn)備進行數(shù)據(jù)測量的傳感器的頻率,將其頻率提高到500 Hz,避免外界信號干擾實驗研究。選擇振動函數(shù)控件庫調(diào)節(jié)采集的發(fā)射信號信息,對信號信息進行分類,將屬于相同幅值的信號匹配到同一幅值空間中,并計算出中間值,對中間值信息進行標(biāo)準(zhǔn)測量,檢驗信息內(nèi)部的函數(shù)存儲狀態(tài)。參照PID 控制離散模型,提升模型內(nèi)部控制系統(tǒng)的調(diào)節(jié)力度,安裝位移寄存器于數(shù)據(jù)構(gòu)建模型中心,根據(jù)寄存器的測量結(jié)果得出上一階段的控制誤差,將測量的結(jié)果設(shè)置為A,計算誤差中心差異率,當(dāng)?shù)贸霾町惵市畔⒑螅M行下一階段的控制誤差測量操作,將測量的結(jié)果設(shè)置為B,依次循環(huán)以上操作,當(dāng)獲取的數(shù)值趨于相似時,停止測量操作,獲得測量的最終數(shù)據(jù),并進行誤差率對比,對比結(jié)果如表2~4 所示。

表2 文中方法的控制誤差率

表3 基于隸屬度函數(shù)調(diào)整的控制方法下的誤差率

表4 傳統(tǒng)PID控制方法下的控制誤差率
根據(jù)表2~4 可以看出,文中基于模糊PID 的高速離心機轉(zhuǎn)子振動控制方法的控制誤差小于另外兩種傳統(tǒng)方法。
產(chǎn)生這一結(jié)果的原因是,該文在前期控制階段調(diào)試了控制平臺的控制量信息,將控制量信息乘以一個相應(yīng)的控制系數(shù),獲得精準(zhǔn)的控制數(shù)據(jù)。由此提升控制的有效性,并在控制信號發(fā)出后輸出合適的控制電壓,將電壓信息與控制信號的數(shù)據(jù)相匹配,載入控制文件,并進行自適應(yīng)調(diào)整,實現(xiàn)控制自由,縮減控制的誤差。
4 結(jié)束語
文中基于模糊PID 設(shè)計了高速離心機轉(zhuǎn)子振動控制方法,該方法具有良好的控制有效性,且操作性較強,可在不同的環(huán)境中進行控制研究,精準(zhǔn)控制轉(zhuǎn)子振動頻率。相信該文研究的離心機轉(zhuǎn)子控制方法對工藝領(lǐng)域存在重要意義。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55