基于STC12C5A60S2 的無刷直流電機調速系統
2021-06-27 03:26:26陸瑜吉
電子設計工程 2021年12期
王 楨,周 洪,陸瑜吉
(金陵科技學院機電工程學院,江蘇南京 211169)
傳統直流有刷電機內含碳刷,以機械方式換相,結構復雜且可靠性差,所以人們一直都在尋找更加可靠且具有相似特性的電機作為替代[1-4]。隨著晶體管的發展,通過晶體管構成的電子電路進行換相的無刷直流電機應運而生[5]。無刷直流電機具有良好的啟動和調速性能,同時兼具易實現、易維護、穩定性強和效率高的特點[6],被廣泛應用在家電、汽車電子、工業和航空領域[7-8]。其控制芯片主要有單片機、DSP 以及FPGA 等,單片機以開發成本低、控制性能好、性價比高等優點成為當前應用較多的芯片[9]。相較于國外的技術水平,我國雖然永磁材料豐富,在無刷直流電機上取得了較快的發展,但仍和國外有一定的差距[10-11]。此外,無刷直流電機的驅動電路中必須要有可靠的保護電路,如欠壓保護以防止電機損壞[12-13]。
文中介紹了無刷直流電機的基本結構原理和數學模型,然后以STC12C5A60S2 為主控芯片,設計了調速系統的硬件電路,用C 語言編寫了系統的調速程序,通過實驗驗證了該系統的可行性。
1 無刷直流電機的基本結構
無刷直流電機的主體由帶有繞組的定子和永磁轉子組成。電機工作時,給內部的定子繞組通電產生磁場,與永磁轉子互相作用形成電磁轉矩,從而使轉子轉動。無刷直流電機的結構如圖1所示。

圖1 無刷直流電機結構圖
霍爾傳感器在無刷直流電機中負責測定當前時刻永磁轉子的磁極位置,為電機的換相提供正確信號。當無刷直流電機的永磁轉子經過相應的霍爾傳感器時,霍爾傳感器會輸出一個信號,該信號被送到控制芯片,控制芯片處理后發出控制信號使得相應的定子繞組通電,繞組產生磁場使得轉子可以繼續轉動下去,以此往復循環。
2 無刷直流電機的數學模型
為了簡化模型,作出如下假設:
1)定子繞組的電阻和互感均相等;
2)忽略電樞反應和鐵芯飽和;
3)各定子繞組空間對稱;
4)全橋電路的開關管和續流二極管均為理想器件。
無刷直流電機的等效電路如圖2 所示。
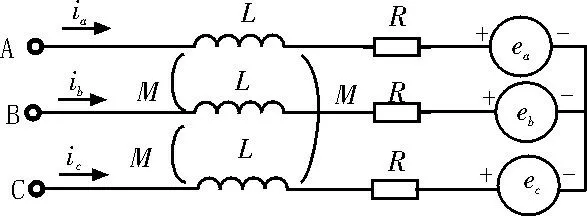
圖2 無刷直流電機等效電路
根據圖2可以得出各個定子繞組的端電壓方程:

式中,ua、ub、uc為三相定子繞組的端電壓,ia、ib、ic為各定子繞組的電流,ea、eb、ec為各定子繞組的反電勢,R為各定子繞組的電阻,L為每相繞組的自感,M為繞組之間的互感。
電磁轉矩可表示為:

式中,ωm是電機的機械角速度。
電機運動方程為:

式中,TL為負載轉矩,J為電機轉子轉動慣量,B為阻尼系數。
3 調速系統硬件電路設計
在該調速系統中,硬件電路包括降壓整流電路、電壓采集電路、電流采集電路和全橋逆變電路等電路。硬件電路系統框圖如圖3 所示。
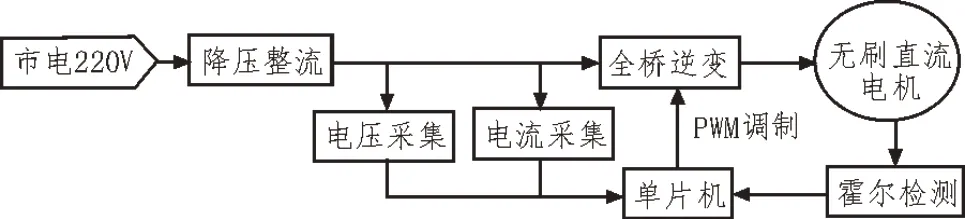
圖3 硬件電路系統框圖
其中,降壓整流電路采用24 V 直流可調穩壓電源代替。由于單片機單個引腳可以承受的電流不能超過20 mA,故需要對電流采集電路做特殊處理,如圖4 所示。主回路的電流流過采樣電阻產生微弱的壓降信號,經過運放放大后輸入單片機的P1.0 引腳。電壓采集電路同理,單片機的單個引腳輸入不可超過5 V,故設計一個電阻分壓電路以采集母線電壓,并輸入P1.1 引腳。

圖4 電源輸入以及采樣電路
STC12C5A60S2 的最小系統電路如圖5 所示。

圖5 單片機最小系統電路
按鍵電路包括3 個按鍵,如圖6 所示,其主要功能是實現無刷直流電機的啟停,正轉加速/反轉減速和正轉減速/反轉加速。3 個按鍵分別接至STC12 C5A60S2 的P2.1、P2.2 和P2.3。當沒有按鍵按下時,3 個引腳都是高電平狀態,當有按鍵按下時,該按鍵所連的引腳被拉至低電平,單片機檢測到低電平信號后便執行相應的策略。

圖6 按鍵電路
LCD1602 液晶顯示電路和無刷直流電機的霍爾傳感器接線電路如圖7 所示。LCD1602 負責顯示一些比較重要的參數,比如直流母線電壓、電流、電機工作狀態和轉速。霍爾傳感器電路負責將信號傳至P3.5、P3.6 和P3.7 引腳,以此讓單片機判斷電機轉子的位置。

圖7 LCD1602及霍爾傳感器電路
驅動電路由一個四路與門芯片和3 個半橋驅動芯片組成,如圖8 所示。P1.3 是STC12C5A60S2 的PWM 輸出引腳,通過3 個與門拓展成三路PWM 信號,同時由另外3 個引腳P3.2、P3.3 和P3.4 控制三路PWM 信號的有無。在此基礎上,與門輸出的PWM信號輸入給各個半橋驅動芯片的2 號引腳,再由P1.5、P1.6 和P1.7 輸入給各個半橋驅動芯片的3 號引腳,對芯片進行使能控制,即控制驅動芯片有無輸出。在驅動芯片3 號引腳允許使能時,7 號引腳的輸出和2 號同相,5 號引腳的輸出和2 號反相,這也避免了同一橋臂上、下管同時導通造成短路。由此便可通過單片機控制三相全橋電路6 個開關管的通斷。

圖8 驅動電路
三相全橋逆變電路使用6 個MOSFET 場效應管實現,由VT1 和VT4、VT3 和VT6、VT5 和VT2 構成三相的3 個橋臂,每個橋臂使用單獨的半橋驅動芯片驅動,無刷直流電機的3 個定子繞組分別接至各個橋臂上開關管的源極和下開關管的漏極之間,如圖9 所示。用來控制的PWM 調制可以在維持直流母線電壓恒定的情況下,通過控制開關管的通斷來改變施加到定子繞組端電壓脈沖的寬度,從而實現無刷直流電機的調速。文中的調速系統以兩兩導通的方式工作,選用H_PWM-L_ON型調制方式,即對上橋臂開關管進行PWM 調制,而下橋臂開關管恒通的工作方式。

圖9 三相全橋逆變電路
4 調速系統程序設計
調速系統的程序中,檢測無刷直流電機的霍爾傳感器信號并作出相應的換相策略是該程序設計的重點。該調速系統使用的無刷直流電機57BL 55S06-230TF9 參數如表1所示。
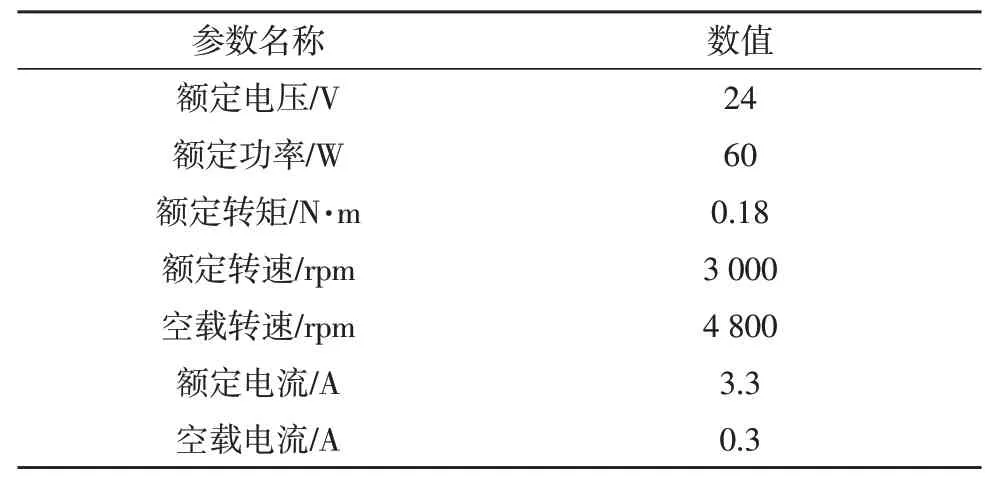
表1 無刷直流電機參數
無刷直流電機在兩兩導通的工作制下一個周期內有6 種磁場狀態,這6 種狀態連續循環就能使電機朝指定的方向一直轉動[14-16]。在這6 種狀態的變化中,需要獲取電機霍爾傳感器的信號,以此為依據進行判斷,決定使上、下橋臂哪兩個開關管導通。
該無刷直流電機的空載轉速為4 800 rpm,即80 rps。因此,單片機每秒內檢測霍爾傳感器信號的次數必須遠大于80 次才可以保證電機的持續運行。在該系統中設置單片機每100 μs 發生中斷檢測一次,即每秒共檢測一萬次。
在程序主函數中進行各項初始化后進入循環,循環中包括電流、電壓采集程序、微機保護診斷程序、按鍵檢測程序、液晶顯示程序。同時另設中斷程序檢測無刷直流電機的霍爾信號,系統程序框圖如圖10所示。

圖10 系統程序框圖
5 實機調速測試
無刷直流電機實機測試如圖11 所示。

圖11 實機測試
然后,使用便攜式雙通道示波器對調速系統相關信號進行測量,圖12 為無刷直流電機單個定子繞組端電壓和轉子所對應的霍爾信號波形,可以看出STC12C5A60S2 在檢測到霍爾信號后對驅動電路所做控制的精確性。

圖12 定子繞組端電壓與霍爾信號波形
調節無刷直流電機的轉速,分別測量低速、中速和高速下單片機PWM 輸出引腳的波形,如圖13 所示。轉速越高,PWM 波形的占空比也就越高。由此可見該調速系統的有效性。

圖13 不同轉速下的PWM調制波形
圖14 為同一橋臂上、下兩個開關管G 極的驅動電壓波形,可以看出,不會出現單橋臂上、下管同時導通的情況,證明了采用該單片機進行PWM 調制的可靠性。

圖14 同一橋臂上、下開關管驅動電壓波形
6 實機保護測試
首先,測試該無刷直流電機調速系統的過載保護,電機過載運行時,定子電流急劇增大。保護閾值設置為1.5 A。待電機轉速平穩后,使其過載運行,觀察到電機轉速急劇下降,液晶顯示上主回路的電流值增至1.59 A,保護啟動,全橋輸出關閉,電機停止運行,過載保護如圖15 所示。

圖15 過載保護
然后,測試電機的欠壓保護。一方面電機在低壓狀態下運行定子電流會增大,導致線圈升溫。另一方面無刷直流電機在電動車領域應用廣泛,電池在低電壓狀態下過度放電會嚴重縮減壽命,所以欠壓保護是很有意義的。該無刷直流電機額定電壓為24 V,設定欠壓保護的閾值為21 V。慢慢調節可調直流電源的輸出直至其低于21 V,觀察到保護啟動,電機停止運行,欠壓保護如圖16 所示。

圖16 欠壓保護
最后,測試電機的堵轉保護,當電機發生堵轉后,定子電流也會急劇增大,一般情況下過載保護可以起到同樣的保護效果。但如果電機工作在低轉速狀態,此時發生堵轉,定子電流也未必會超過過載保護的閾值,導致無法觸發保護,因此另外設置堵轉保護。讓無刷直流電機工作在最低速,令其堵轉,觀察到液晶顯示上的電流增大至0.44 A,經過一定的延時檢測后保護啟動,電機停止運行,堵轉保護如圖17所示。
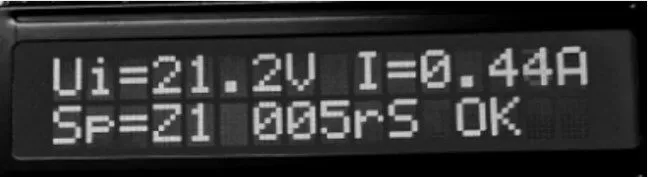
圖17 堵轉保護
7 結束語
文中通過采用STC12C5A60S2 作為主控芯片,設計了一套無刷直流電機的調速系統,采用PWM 調制,并為其設計了微機保護的功能。實驗結果表明,該系統在實現正反轉的基礎上,可以通過改變PWM波的占空比實現無刷直流電機的調速。應對不同的故障情況,可以快速地檢測出過載保護、欠壓保護和堵轉保護并作出響應,證明了該調速系統的有效性和可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45