電控懸架用可變阻尼減振器動(dòng)態(tài)特性研究
2021-06-27 08:01:22張博強(qiáng)趙浩翰馮天培
機(jī)械設(shè)計(jì)與制造 2021年6期
張博強(qiáng),趙浩翰,馮天培,徐 浩
(1.河南工業(yè)大學(xué)機(jī)電工程學(xué)院,河南 鄭州 450001;2.宣城協(xié)盈汽車零部件科技有限公司,安徽 宣城 242000)
1 引言
汽車懸架系統(tǒng)電控減振技術(shù)可有效改善汽車的操穩(wěn)性,可變阻尼減振器因其優(yōu)良的變阻尼特性和減振性能在汽車電控懸架上具有良好的應(yīng)用前景[1]。
減振器的研究主要分為油液可控和閥口可控兩大類[2],目前電磁閥式和磁流變液式可變阻尼減振器出于其優(yōu)良的減振特性逐漸取代了雙筒減振器,磁流變液減振器具有響應(yīng)迅速能耗小等優(yōu)良特點(diǎn)[3],但是由于其昂貴的成本多用于高級(jí)車系中,所以電磁閥式可變阻尼減振器結(jié)合汽車懸架形成常規(guī)半主動(dòng)懸架的應(yīng)用更為普及。文獻(xiàn)[4]中設(shè)計(jì)了一種新型的電磁閥式減振器,并且通過建立復(fù)原和壓縮行程中的數(shù)學(xué)模型和液壓模型,對(duì)減振器的外特性進(jìn)行了研究;文獻(xiàn)[5-6]中以仿真和臺(tái)架試驗(yàn)對(duì)比的方式對(duì)減振器的外特性進(jìn)行了研究,驗(yàn)證了仿真模型的正確性。
在汽車的懸架系統(tǒng)中,電控懸架在自適應(yīng)魯棒控制、模糊控制等一系列不同的控制方式下懸架的減振性能會(huì)得到明顯的改善[7]。2自由度1/4車輛懸架模型作為最簡(jiǎn)單的研究模型,國(guó)內(nèi)外研究人員通常在1/4車輛懸架模型中將減振器用簡(jiǎn)易彈簧模型代替來對(duì)車輛懸架減振性能和優(yōu)化控制進(jìn)行研究。我們?cè)谝陨涎芯康幕A(chǔ)上對(duì)減振器進(jìn)行精確化建模,進(jìn)行汽車懸架減振性能的研究和仿真模型的驗(yàn)證。采用可變阻尼減振器、1/4車輛被動(dòng)懸架、半主動(dòng)懸架和C級(jí)路面的仿真模型相結(jié)合的方法,在對(duì)可變阻尼減振器實(shí)體模型精確建模的基礎(chǔ)上研究懸架減振能力,驗(yàn)證了懸架仿真模型的正確性。
2 減振器的力學(xué)特性分析和控制原理
2.1 復(fù)原行程中力學(xué)模型的建立
根據(jù)復(fù)原行程下減振器內(nèi)的油液流動(dòng)路徑,建立油液流動(dòng)的流體力學(xué)[8]模型為:

式中:Q—在復(fù)原行程下,活塞上移時(shí)上腔產(chǎn)生的油液流量(L/min);
V—活塞移動(dòng)的速度(m/s);A1—活塞腔的橫截面積(m2);
A2—活塞桿的橫截面積(m2),計(jì)算過程中忽略油液的可壓縮性以及油液在流動(dòng)過程中的沿程損失與局部損失。
活塞上腔的油液流量為流經(jīng)復(fù)原閥流量與流經(jīng)電磁閥流量之和,即:

式中:Qf—油液流經(jīng)復(fù)原閥的流量(L/min);
QEf—油液流經(jīng)電磁閥的流量(L/min)。
減振器閥口流通孔長(zhǎng)度L與孔徑d的關(guān)系為:
L/d≤0.5
該流通孔可以視為薄壁小孔,由流體力學(xué)可知,復(fù)原行程中流經(jīng)復(fù)原閥與電磁閥的流量為:
式中:Cd—小孔流量系數(shù),由試驗(yàn)得到取值范圍為(0.61~0.62)(無量綱);As—復(fù)原閥閥口面積(m2);ρ—液壓油密度;Pu—活塞上腔壓力(MPa);Pd—活塞下腔壓力(MPa)。
式中:Ae—電磁閥開度(m2);Pc—儲(chǔ)油腔壓力(MPa);Pz—中間腔壓力(MPa)。
將式(3)和(4)代入式(2)有:

將式(5)代入式(1)得復(fù)原行程的工作缸壓力差為:

因?yàn)镕=PA,有背壓時(shí)F=P1A1±P2A2,可得復(fù)原行程產(chǎn)生的阻尼力為:

式中:A2—活塞桿橫截面積(m2)

壓縮行程與復(fù)原行程中的計(jì)算原理相同,此處不再贅述。
2.2 減振器控制原理
閥控式可變阻尼減振器的控制由先導(dǎo)式溢流電磁閥作用,在不同電流的作用下電磁閥中可變節(jié)流孔的開度大小不同,油液流量產(chǎn)生的阻尼力大小也隨之改變。在給定電磁閥一定的電流大小的條件下,研究不同速度下的阻尼力值大小得出減振器的工況。
3 可變阻尼減振器建模仿真與驗(yàn)證
3.1 可變阻尼減振器的結(jié)構(gòu)參數(shù)
通過拆解某高端乘用車減振器實(shí)物可知,如圖1所示。該減振器主要由三部分結(jié)構(gòu)組成:活塞閥系、底閥系和電磁閥系。活塞閥系包括:流通閥片、復(fù)原閥片和閥座;底閥系包括:補(bǔ)償閥片、壓縮閥片和閥座;電磁閥(旁路閥)系包括:主閥、恒定節(jié)流孔、彈簧元件和先導(dǎo)腔等元件。
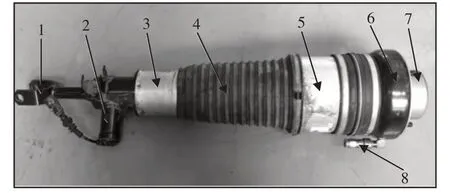
圖1 可變阻尼減振器實(shí)體圖Fig.1 Solid Diagram of Variable Damping Shock Absorber
3.2 可變阻尼減振器的仿真研究
實(shí)測(cè)后的減振器參數(shù),如表1所示。
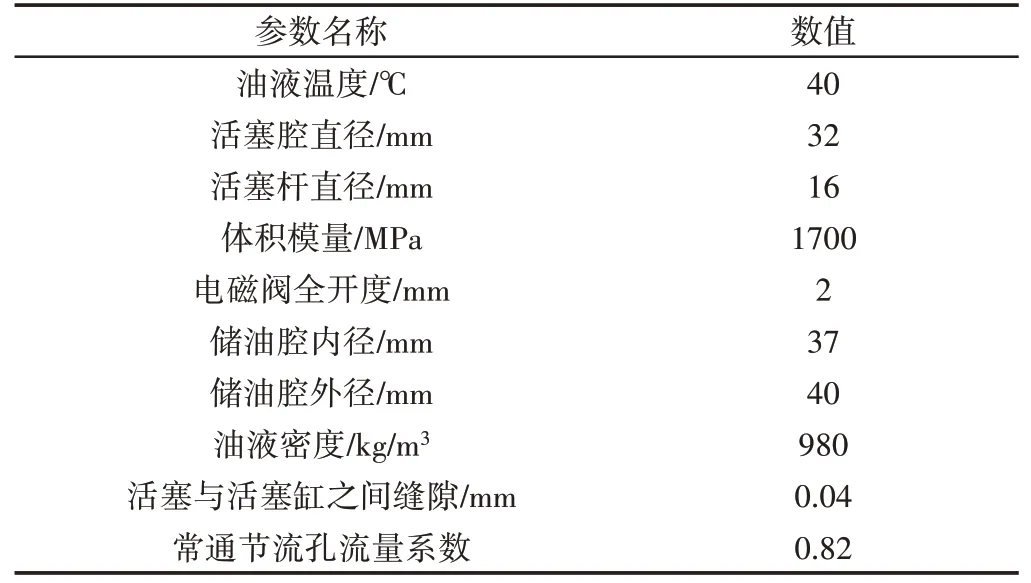
表1 仿真模型主要參數(shù)Tab.1 Main Parameters of The Simulation Model
利用多學(xué)科領(lǐng)域系統(tǒng)建模AMESim仿真軟件進(jìn)行建模[9],模型中分別模擬了減振器的三腔四閥結(jié)構(gòu),其中先導(dǎo)式電磁閥部分用PID信號(hào)源進(jìn)行控制,建立的可變阻尼減振器仿真模型,如圖2所示。
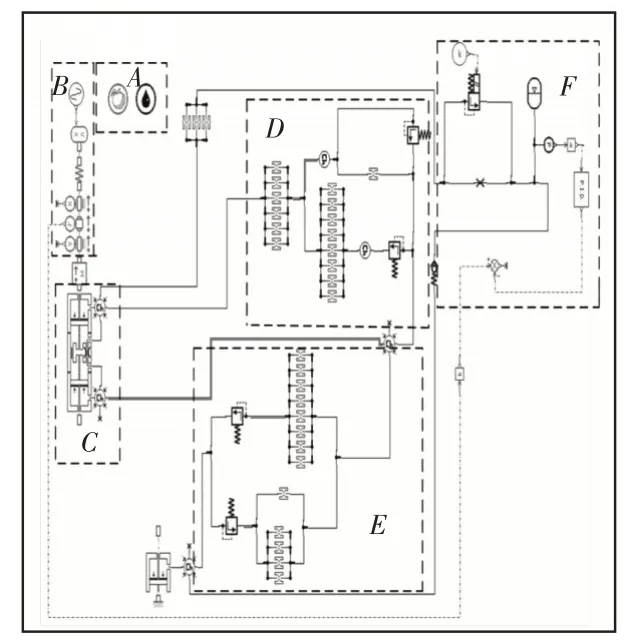
圖2 AMESim減振器仿真模型Fig.2 AMESim Shock Absorber Simulation Model
圖中:A—油液特性;B—激勵(lì)輸入;C—活塞腔;D—活塞閥系;E—底閥系;F—電磁閥系。
3.3 臺(tái)架試驗(yàn)研究
參考國(guó)家汽車行業(yè)減振器臺(tái)架試驗(yàn)標(biāo)準(zhǔn)QC/T545,在該標(biāo)準(zhǔn)下進(jìn)行可變阻尼減振器特性試驗(yàn)研究[10]。采用正弦激勵(lì)方式[11]:

式中:V—減振器內(nèi)活塞運(yùn)行速度(m/s);
n—正弦輸入頻率;
S—減振器行程(mm)。
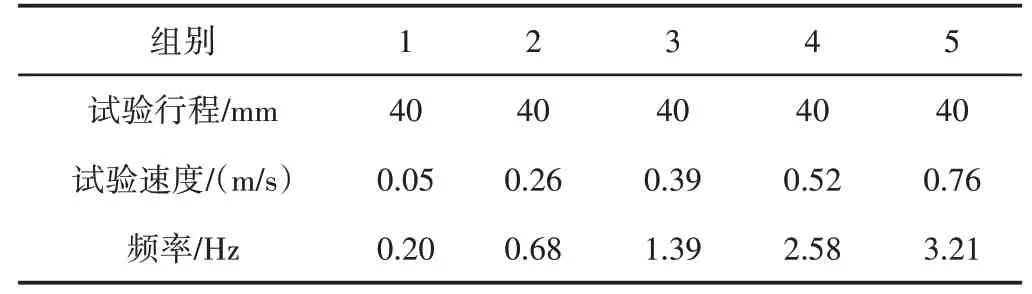
表2 激勵(lì)參數(shù)Tab.2 Excitation Parameters
試驗(yàn)硬件參數(shù)設(shè)置,如表3所示。
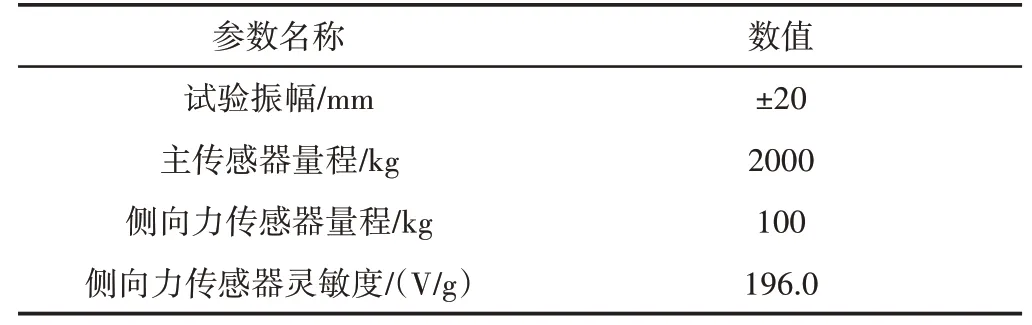
表3 試驗(yàn)硬件參數(shù)Tab.3 Test Hardware Parameters
測(cè)試試驗(yàn)如下:通過控制臺(tái)施加激勵(lì)并拾取響應(yīng),設(shè)置激振行程為40mm,固定正弦輸入。給定電磁閥輸入電流1.8A、電壓12.3V、激振速度為0.05m/s-1.00m/s。臺(tái)架試驗(yàn)臺(tái),如圖3所示。
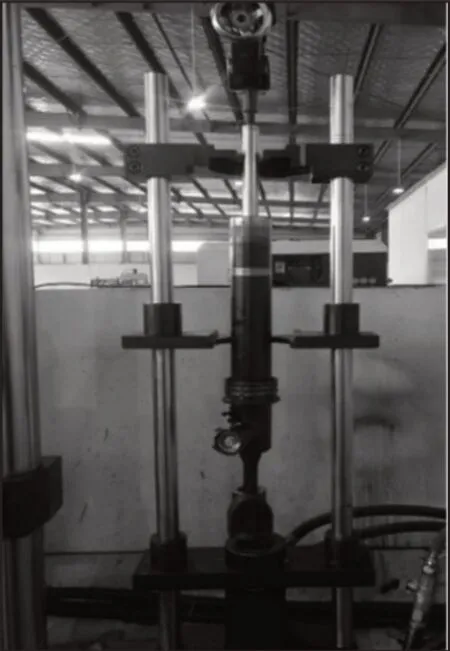
圖3 臺(tái)架示功試驗(yàn)臺(tái)Fig.3 Indicator Power Test Bench
3.4 仿真與試驗(yàn)結(jié)果對(duì)比
通過仿真與試驗(yàn)在輸入設(shè)定的參數(shù)的條件下,仿真與實(shí)驗(yàn)得出的示功特性曲線圖,如圖4所示。
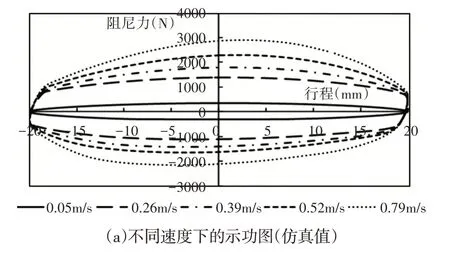
通過臺(tái)架試驗(yàn)和AMESim仿真研究,最后得出了可變阻尼減振器外特性的研究結(jié)果,試驗(yàn)結(jié)果與仿真結(jié)果的力值大小在誤差范圍內(nèi)基本相符,最大誤差為15.6%,示功圖線形飽滿而且沒有空程畸變現(xiàn)象。由以上分析可以說明AMESim所建減振器模型的精確性,同時(shí)得出該模型可用于研究車輛1/4半主動(dòng)懸架和被動(dòng)懸架對(duì)于車輛的減振效果。
4 基于1/4車輛懸架模型的仿真研究
汽車被動(dòng)懸架因不能根據(jù)路況來調(diào)節(jié)阻尼大小,使汽車的操縱穩(wěn)定性較差,逐漸被半主動(dòng)懸架和主動(dòng)懸架取代[12]。而汽車主動(dòng)懸架成本較高、結(jié)構(gòu)復(fù)雜而且耗能大,多應(yīng)用于高級(jí)轎車[13]。半主動(dòng)懸架因結(jié)構(gòu)簡(jiǎn)單,擁有與主動(dòng)懸架相近的性能,應(yīng)用廣泛。
將對(duì)被動(dòng)懸架和半主動(dòng)懸架做對(duì)比研究,依據(jù)國(guó)產(chǎn)某車型的懸架系統(tǒng)建模分析,所需參數(shù)如表4所示。
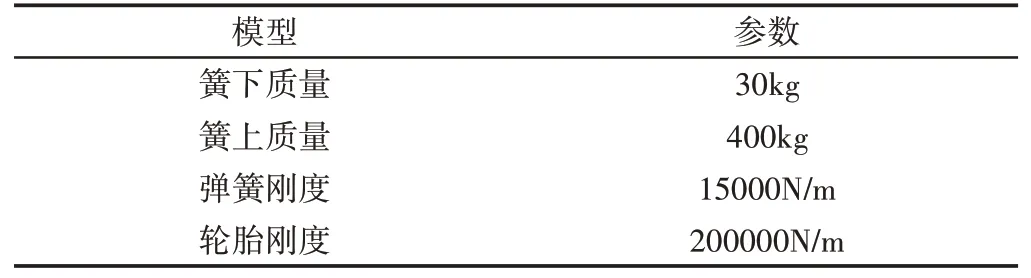
表4 懸架系統(tǒng)主要參數(shù)Tab.4 Main Parameters of Suspension System
4.1 1/4汽車懸架的動(dòng)力學(xué)仿真模型建立
根據(jù)車輛懸架的結(jié)構(gòu)特點(diǎn),將車身懸架部分劃分為多種自由度,文中所研究的汽車懸架的振動(dòng)方向均為z軸垂向,在被動(dòng)懸架的研究中建立了2自由度1/4車輛懸架仿真模型,如圖5所示。
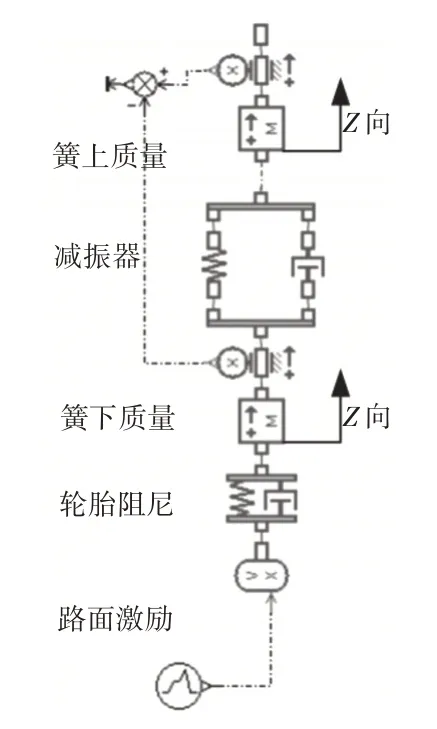
圖5 1/4車輛被動(dòng)懸架模型Fig.5 1/4 Vehicle Passive Suspension Model
在可變阻尼減振器系統(tǒng)的基礎(chǔ)上建立了半主動(dòng)空氣懸架模型,模型中分別加入了空氣彈簧、車身、輪胎和路面信號(hào)激勵(lì)等子模型,建立的仿真模型,如圖6所示。
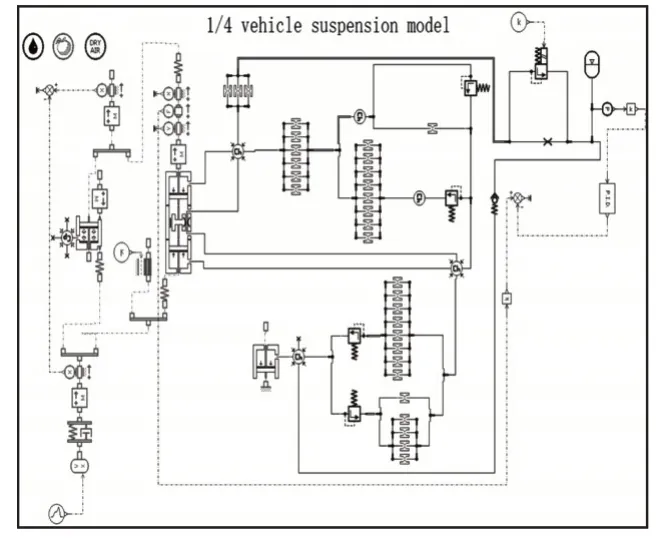
圖6 1/4車輛半主動(dòng)懸架仿真模型Fig.6 Simulation Model of 1/4 Vehicle Semi-Active Suspension
4.2 懸架的控制策略
PID控制具有運(yùn)算量小,實(shí)時(shí)性好等優(yōu)點(diǎn),所以在可變阻尼減振器空氣懸架中采用PID控制。PID控制器由比例單元,積分單元和微分單元組成,其原理公式如下:

式中:e(t)—系統(tǒng)誤差;Kp—比例系數(shù);Ki—積分系數(shù);Kd—微分系數(shù);u(t)—控制器的輸出力。
將PID控制器作用于懸架的減振系統(tǒng)中,然后在該控制器的控制下進(jìn)一步研究?jī)煞N不同懸架的減振器性能。
4.3 不同路面信號(hào)源激勵(lì)下懸架性能對(duì)比
路面的好壞程度會(huì)影響懸架的性能。在下列研究中應(yīng)用白噪聲發(fā)生源,搭建了車輛速度20m/s的C級(jí)路面激勵(lì)模型和路面激勵(lì)信號(hào)[14],如圖7所示。
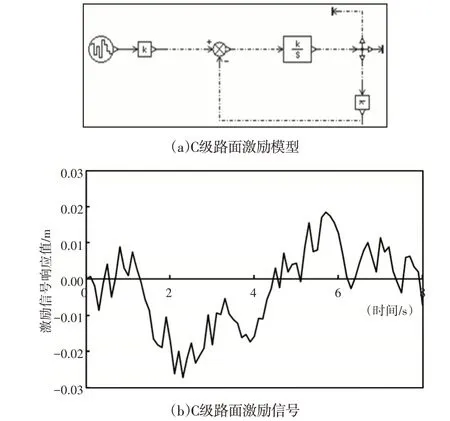
圖7 C級(jí)路面激勵(lì)模型、信號(hào)示意圖Fig.7 Schematic Diagram of Excitation Model and Signal of C-Grade Road Surface
將隨機(jī)路面信號(hào)作為激勵(lì)信號(hào)傳輸?shù)奖粍?dòng)懸架和半主動(dòng)懸架中,通過對(duì)比時(shí)域內(nèi)車身的速度、位移和加速度幅值,可以得出兩種懸架的減振能力,仿真結(jié)果,如圖8所示。
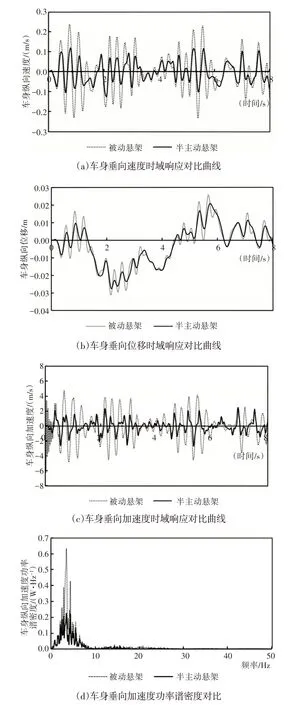
圖8 車身垂向速度、位移、加速度時(shí)域響應(yīng)對(duì)比曲線、及車身垂向加速度功率譜密度對(duì)比示意圖Fig.8 Comparison Curve of Time-Domain Response of Vehicle Vertical Velocity,Displacement and Acceleration and the Body Vertical Acceleration Power Spectrum Density Comparison Diagram
通過對(duì)比車身加速度的功率譜密度可以說明在頻域內(nèi)不同懸架振動(dòng)能量的差別,如圖8(d)所示。
由圖8可得:時(shí)域內(nèi)輸入C級(jí)路面激勵(lì)得出的車身和簧下質(zhì)量塊的運(yùn)動(dòng)狀態(tài),半主動(dòng)懸架車輛車身垂向的位移、速度和加速度的幅值均比被動(dòng)懸架的低。在車身縱向加速度的功率譜密度對(duì)比中,被動(dòng)懸架密度值0.63(W/Hz),半主動(dòng)懸架密度值0.25(W/Hz)。
5 結(jié)論
利用可變阻尼減振器、1/4車輛被動(dòng)懸架、半主動(dòng)懸架和C級(jí)路面的仿真模型相結(jié)合的方法,對(duì)可變阻尼減振器進(jìn)行了動(dòng)態(tài)特性研究,仿真和試驗(yàn)結(jié)果表明:(1)通過分析可變阻尼減振器的實(shí)際構(gòu)造、工作原理和內(nèi)部的油液流動(dòng)情況等機(jī)理,建立了可變阻尼減振器的仿真模型,與臺(tái)架試驗(yàn)對(duì)比驗(yàn)證了可變阻尼減振器模型以及參數(shù)的正確性。(2)在C級(jí)路面激勵(lì)下,半主動(dòng)懸架車身振動(dòng)的幅值低于被動(dòng)懸架,半主動(dòng)懸架的功率譜密度值較被動(dòng)懸架低,有效得出了建立的仿真模型的準(zhǔn)確性。(3)研究結(jié)果對(duì)可變阻尼減振器的應(yīng)用以及懸架系統(tǒng)的設(shè)計(jì)開發(fā)提供了可靠的理論依據(jù)和研究方法,降低了調(diào)試和開發(fā)難度。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國(guó)語大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
汽車工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
