新型下肢外骨骼機器人動力學仿真
2021-06-27 08:03:22趙英朋
機械設計與制造 2021年6期
關鍵詞:系統
鄧 斌,趙英朋
(西南交通大學先進驅動節能技術教育部工程研究中心,四川 成都 610031)
1 引言
隨著科學技術日新月異的發展,下肢外骨骼機器人技術也得到快速的更迭,針對不同場合具有更加良好的適應性。美國加州大學伯克利分校人機工程實驗室于2004年研發出一種具有真正意義上的擬人化下肢外骨骼機器人[1](Berkeley Lower Extremity Exoskeleton,BLEEX)。BLEEX能夠跟隨穿戴者完成基本動作,如平地行走、彎腰、跨越或俯身繞過障礙,首次完成8字形行走。BLEEX的升級版HULC[2]結構上更加符合人體特征,液壓系統更加高效合理,滿足士兵對靈活機動性和穩定支撐性的需求,還能完成下蹲和匍匐等復雜動作。SARCOS公司于2008年成功研制出外骨骼機器人XOS[3]。
國外在外骨骼結構,控制算法等方面技術成熟,國內對外骨骼相關研究起步較晚,技術還在不斷發展當中。文獻[4]試驗驗證單關節(膝關節)驅動比多關節驅動更加節能,因此只在膝關節設置一處液壓驅動單元,取消踝關節和髖關節處驅動單元,在髖關節和外骨骼背板之間新加一套凸輪連桿機構,代替原先髖關節部分功能。
背包式負重行走對于軍人來說就像是家常便飯,外部負重施加壓力作用于人體肩部,背部及臀部,間接影響人體重心位置變化。為了保持人體穩定和平衡,人體軀干勢必做出調整以適應外加負載所帶來的影響。外骨骼機器人的出現很大程度上解決了負重給人體帶來的負重感,文獻[5]表明外加負重95%的重量由外骨骼承受,只有極少部分負重由人體承受。但在穿戴外骨骼機器人之后,外加負載與人體軀干近似為一體,使得人體有繞髖關節向后轉動的趨勢,人機系統(下文簡稱系統)重心有時不能投影在滿足人機系統穩定性的區域內。負重型外骨骼機器人在外加負載作用下,軀干會后傾,因此穿戴者需要控制身體軀干前傾以減小外加負載帶來向后傾倒的趨勢,保持系統的穩定性。
2 人體步態及穩定性分析
人正常行走看似是個簡單卻又是很復雜的過程。首先分析人體正常步態有助于進一步分析負重時步態特征,正常步態示意,如圖1所示。一個步態周期分為:單足支撐期-雙足支撐期-單足支撐期,方便起見,先分析圖中著色腿(右),左腿相比右腿滯后半個步態周期。其中單足支撐時間約占一個步態周期的60%,擺動時間約占為40%[6]。
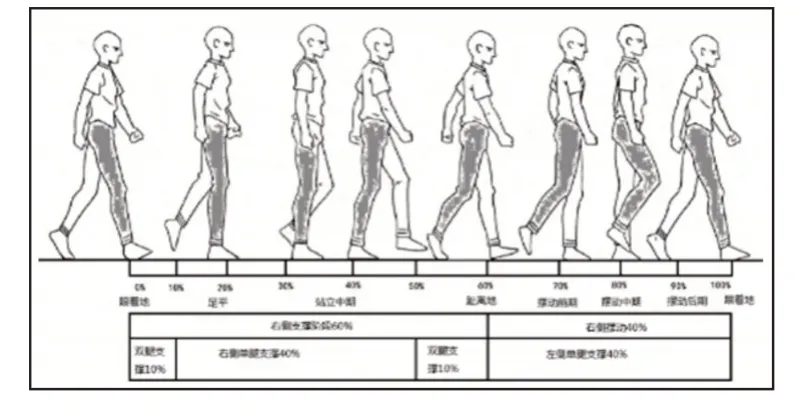
圖1 一個步態周期Fig.1 A Gait Period
與上述人體正常行走不同,人體負重行走特征研究較為復雜,行走時各種變量相互影響,并且不同行走速度、不同負重、甚至負重的方式都會成為影響步態模式的重要因素[4]。人體下肢占人體重的34%左右,不同負重及負重方式的改變對下肢步態的影響較小,負重之后,分析人身穿外骨骼負重步態時,忽略下肢步態變化帶來的下肢重心變化對整個系統(包括負重)重心變化的影響。
仿生機器人行走穩定性判據主要包括靜態穩定性和動態穩定性兩類,靜態穩定性判據主要有重心投影法等[7],動態穩定判據主要是基于ZMP的穩定性判據等。由圖1可知,在一個步態周期內有大約60%的時間是單腿支撐期,一側各占30%,中間時期出現支撐腳從一側轉換到另側。假設人體穿戴外骨骼作勻速運動且速度較低,人體軀干上肢等慣性力可以為零,人體下肢慣性力變化較小,忽略不計。
動態過程在每個時刻可以認為是靜態的,因此通過研究系統動態運動過程的每個時刻的靜態穩定性來驗證系統的動態穩定性,采用重心投影法判斷系統穩定性。通過系統重心位移變化量,可以直接看出系統在使用新的髖背結構之后相較于之前的下肢外骨骼有沒有改善。
3 動力學建模及方法
3.1 方法簡介
為了驗證新型外骨骼機器人能否滿足要求,首先對人體下肢進行動力學建模。人類在行走過程中,大多數時間是在矢狀面內直線行走,為簡化計算只考慮人體在矢狀面內的運動。之前研究工作將人體下肢和軀干簡化為五桿模型,忽略踝關節的作用。文獻[8]指出在踝關節處的作用力矩并沒有小到可以忽略不計的程度,將踝關節考慮進去,更加接近人體實際行走模式,對于系統重心變化量的分析也有一定幫助。因此將人體模型簡化為七桿模型包括:雙足、雙小腿、雙大腿和軀干。七桿模型,如圖2所示。
對于人體下肢動力學建模方法,主要有Newton-Euler方程,Lagrange方程及Kane方程。Lagrange方程是基于能量項對于系統變量及時間的微分而建立的,建模矩陣非常龐大,不利于計算機編程計算,相較于Newton-Euler方程法,Lagrange方法更適應于復雜程度高的系統,但需要求解勢能和動能,不利于計算。文獻[9]指出對于機器人這樣的多自由度復雜系統,應用Kane方法可以減少計算步驟,提高計算效率,不僅如此,Kane方法計算步驟程式化,具有疊加性,可以借助計算機完成微分、點乘、變換等運算。因此應用Kane方法對下肢進行動力學建模。
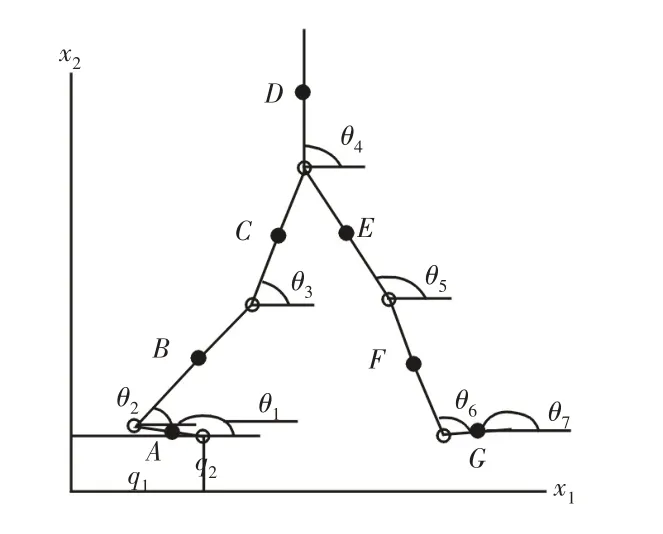
圖2 七桿模型Fig.2 Seven Bar Model
3.2 動力學建模
人體下肢及軀干為理想型七桿9自由度約束系統,選取廣義速率為:

式中:q1,q2,θ1,…θ7如圖2所示,q1,q2—腳尖至坐標原點距離,θ1,…θ7—各體段與水平線夾角(rad),定義逆時針為正,順時針為負。
由達朗貝爾原理和虛位移原理推得系統的動力學普遍方程為:

Kane方法的一般方程為:

式中:V—偏速度矩陣;
F—主動力矩陣;
F?—慣性力矩陣;
W—偏角速度矩陣;
L—人體關節主動力矩;
L?—慣性力矩。
式2可以化簡成式3的數值積分形式。

其中,
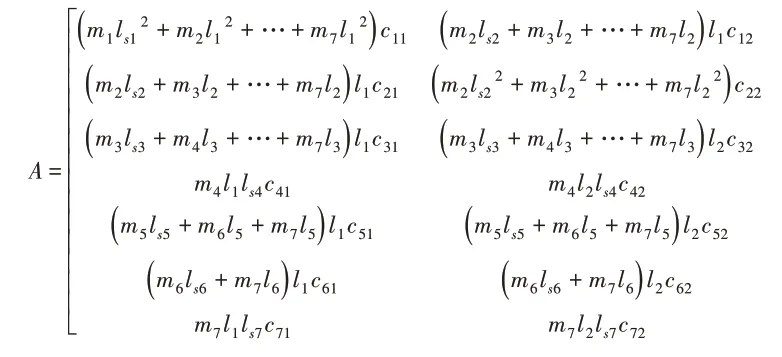
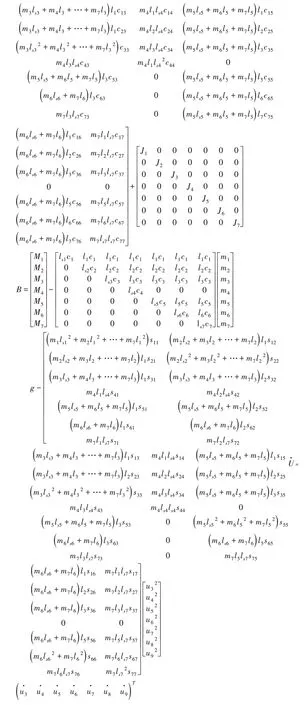
式中:mi—各段質量;lsi—各體段質心距鉸點距離;li—各段長度;ci—cos(θi);cij—cos(θi-θj);sij—sin(θi-θj);g—重力加速度,取值為9.8m/s2;Mi—關節處的肌肉力矩;Ji—體段的轉動慣量。
4動力學仿真
4.1 確定參數
根據文獻[10]確定各體段的轉動慣量。采用標準人體身高為1700mm,體重為65kg。人體下肢及軀干七桿模型主要考慮踝關節、膝關節、髖關節在矢狀面內旋轉,人體各關節在矢狀面內范圍參考文獻[11]。
4.2 建模及仿真
凸輪連桿機構原理,如圖3(a)所示。高副低代圖,如圖3(b)所示。圖3(a)中A、C為鉸點,滾子在桿3上D點,桿1一端帶有圓弧槽,圓弧圓心在B點。桿1相對于A點順時針旋轉,桿3在機構作用下逆時針旋轉。
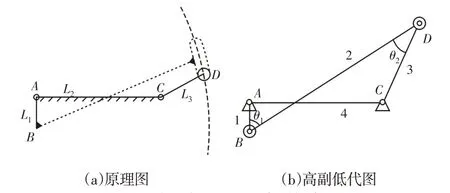
圖3 凸輪機構原理圖及高副低代圖Fig.3 Schematic Diagram of the Cam Mechanism and the High-Level and Low-Pass Diagram
在三維軟件SolidWorks里建立人機模型,在綜合對比了幾種常見材料之后,考慮到輕便性外骨骼材料最終選擇密度小剛度大的鋁合金2024,幾種材料屬性,如表1所示。
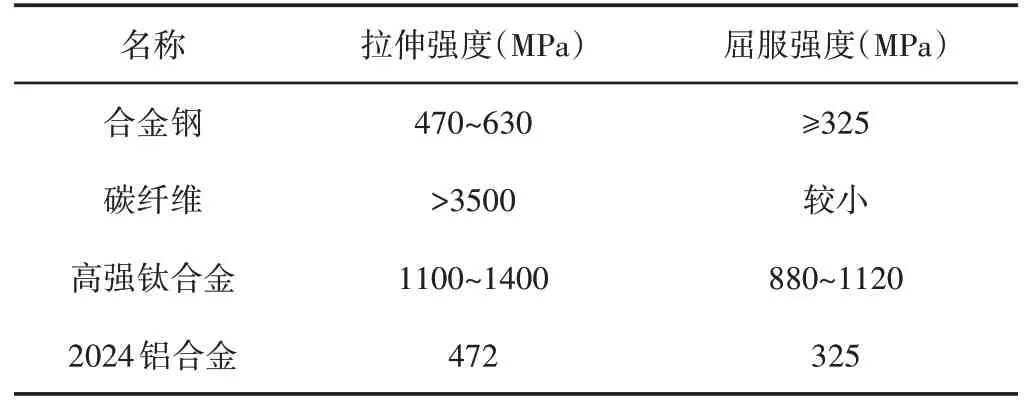
表1 材料屬性對比Tab.1 Comparison of Material Properties
首先驗證三維模型靜止站立時,固定腳,加載最大負重50kg(由四桿機構桿長及傳力特性知,軀干此時受力約為20%的Body Weight后簡稱BW),觀察模型最大應力和位移云圖,如圖4所示。應力云圖結果顯示最大應力值170MPa,小于許用應力,滿足強度使用要求,應力集中位置主要在零件形狀突變出和位置轉折點處。將零件截面突變處加倒角和圓角,優化零件形狀,使其受力均勻,避免出現應力集中現象。圖4(a)顯示最大位移在靠背板頂端,值為4.9mm,髖關節所在點位移約為2mm,由下式得出髖關節相對腳底向后旋轉角度θ為0.13°,占最大負重時軀干傾斜的2.5%,對系統重心移動產生的影響較小。

式中:h1—形變位移量;
H1—髖關節至腳底高度。
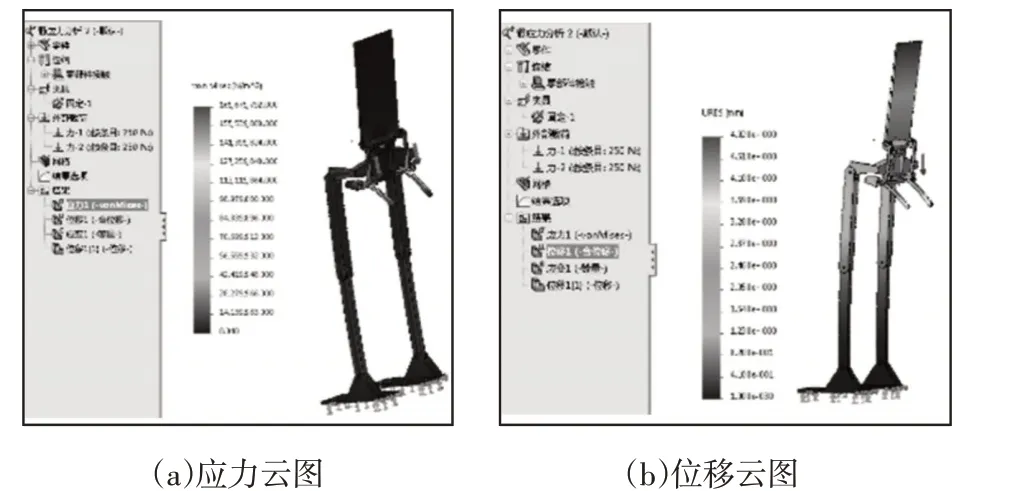
圖4 應力及位移云圖Fig.4 Stress and Displacement Clouds
然后將Solid Works建立的模型導入Adams中,把各體段質量、質心、轉動慣量等參數按照文獻[10]導入到體段的相應位置。最后添加各體段驅動函數,驅動系統進行仿真運算,Adams中虛擬樣機模型,如圖5所示。
圖5 Adams中虛擬樣機Fig.5 Virtual Prototype in Adams
外骨骼負重不同于傳統背包負重,為了方便計算,將靠背板所受的力p全部加在人體背部,由四桿機構特性可知負重與靠背板受力關系滿足下式,參數如圖3(b)所示。

式中:F—負載重力;l1—AB長;l3—CD長;θ1—AB與BD夾角(rad);θ2—BD與DC夾角。
新機構是否有效,采用對比的方法對設計的機構進行仿真驗證。將人體背部受到力的大小表示成占BW百分比形式,依次為5%、10%、15%和20%BW,對應負重依次為23.5kg、35.5kg、44.8kg和52kg。對于未加機構的下肢外骨骼根據文獻[5]所述,其可以幫助人體承擔大約95%的負重,由于人體承擔的負重較小,導致人體與外骨骼之間人機交互性差,不利于行走,將來自負重20%的作用力作用在人體背部,增強人機交互性,同時假設背負52kg的重物時,20%由人體承受,占標準人體體重的16%,符合文獻[12]得出負重(15~20)%BW是人體行走的適宜范圍。
4.3 仿真結果
第一種情況,系統未加髖背機構。外加負重經由外骨骼髖背機構分別施加5%BW、10%BW、15%BW和20%BW的作用力在人體背部,由文獻[12]試驗知軀干前傾角度依次為0.5°、0.95°、1.4°、2°與5.3°,與初始位置(0.5°)進行對比,驗證整個系統的重心在矢狀面內變化情況,如圖6所示虛線。圖6(a)中N_Load_5%BW表示負重5%BW未裝有髖背機構,(b)、(c)、(d)與此相同。第二種情況:系統中構裝有髖背機,所加負重作用在靠背板的力分別為5%BW、10%BW、15%BW和20%BW,再與初始位置(0.5°)進行對比,驗證系統重心在矢狀面內前后方向上移動情況,如圖6所示實線。圖6.a)中Y_Load_5%BW表示負重5%BW且裝有髖背機構,(b)、(c)、(d)與此相同。其中質心計算公式如下式,將矢狀面與冠狀面交線定義為參考線。

式中:mi—各體段質量;ri—各部分質心投影在矢狀面內到參考線的距離(前為正,后為負);M—系統質量;r—系統質心在矢狀面內相對于參考線的距離。
仿真結果參考坐標原點為矢狀面、冠狀面和水平面三面交點,將冠狀面定于人體模型背部與外骨骼接觸所在面,考慮到髖關節作為人體上下分界點,將水平面定義在人體髖關節偏上處,重心在水平面上數值為零,便于計算。
由圖6(a)、(b)、(c)、(d)中虛線可知,未加機構時負重依次增加時,初始時系統重心在矢狀面內相對參考線距離為124mm,負重后系統重心在冠狀面內位移變化值相對于初始位置減小量(向后移動,下同)依次為59mm、79mm、90mm、96mm,隨著負重增大,系統重心逐漸向身體后側移動。由圖6(a)、(b)、(c)、(d)中實線可知,加了機構之后負重依次增加時,重心位移變化相對于初始位置移動量依次為54mm、72mm、82mm、88mm。變化量占參考距離的百分比依次為43.5%、58.1%、66.1%和70.9%,可以看出百分比相較于之前有所減小,同比減小百分比依次為8.6%、8.8%、9%和8.4%,可見新機構可以使得系統重心有所前移,比例在9%左右。
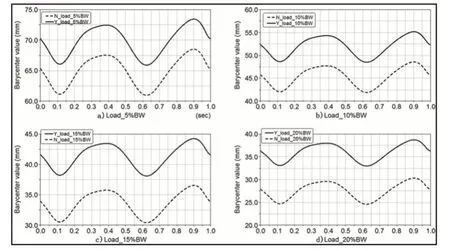
圖6 系統重心在矢狀面內前后位移變化量Fig.6 The Amount of Displacement of the Center of Gravity of the System in the Sagittal Plane
當系統沒有加髖背機構時,負重隨著人體軀干繞髖關節轉動。由圖3.a知桿1與桿3相對A點作反向轉動,結合圖5可知負載加在桿1上,由于機構作用,負重與人體軀干作反向運動,相對于負重初始位置相比機構使得負重重心向下,進而使得系統整體重心相對降低,有利于系統穩定。不同負重比例時系統重心在豎直方向上相對于未加髖背機構時系統重心均有所下降,且負重比例越大時系統重心降低差值越大,如圖7所示。這是因為當負重越大時軀干前傾角度變大,負重相對于初始位置繞髖關節旋轉角度越大,負重端小角度轉動與靠背端大角度轉動導致負重增加而重心位置卻上升。
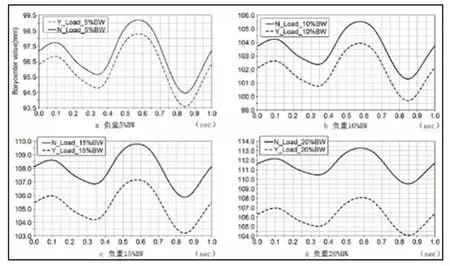
圖7 系統重心在豎直方向上變化量Fig.7 Variation of the Center of Gravity of the System in the Vertical Direction
由圖7可知,當負重較小時,重心上下位移變化曲線在形狀上接近正弦函數,但在一個周期內規律性較差,隨著負重增加,重心變化曲線越接近正弦函數。在一個步態周期內隨著左右下肢交替擺動,理想狀態下曲線前后兩段是一樣的,忽略身體左右擺動帶來的影響,曲線趨于規律性,利于行走穩定性。
5 結論
(1)采用Kane方法建立人體七桿模型,將行走過程中不可缺少的足考慮進去更加符合人體實際行走情況,相比Newton定律、Euler方程和Lagrange方程,Kane方法不需求動能和勢能,更適宜用計算機完成求解,減小計算量,提高工作效率。
(2)采用新機構作為人體與外骨骼在髖關節處的聯結機構,使得原本負重與人體軀干一起轉動(繞髖關節)的方式變為反向轉動。結果表明機構在負重之后,系統重心向后移動趨勢減小,相較于前者,現在的系統重心與初始系統穩定點更加接近,有利于系統穩定性。
(3)采用新機構時,負重與人體上肢及軀干作反向轉動,系統重心有所降低且隨著負重增大,下降變化量就越大。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
