M310核電機組主給水泵調速優化研究
2021-06-25 13:06:56胥敬德
儀器儀表用戶 2021年6期
龐 偉,池 通,胥敬德
(江蘇核電有限公司,江蘇 連云港 222000)
0 引言
M310核電機組配置3臺立式蒸汽發生器,共用給水母管,為實現3臺蒸發器液位控制解耦,設計有主給水流量調節閥開度控制和主給水泵轉速控制兩套系統。正常運行時,由主給水泵轉速調節系統維持主給水母管壓力穩定,由主給水流量調節閥控制進入每臺蒸發器的給水流量。但是由于立式蒸發器橫截面小、液位運行區間窄,蒸發器液位波動導致停機停堆的事件仍然時有發生。因此,有必要對主給水泵調速方法進行優化研究[1]。
1 M310主給水泵轉速調節原理
目前,國內M310機組主要采用電-液位置控制VEHS和伺服電機控制KE1A兩種調速方案,兩種方案均由壓差調節、轉速調節、勺管位置調節3個閉環回路串級組成。

圖1 主給水泵轉速調節原理圖Fig.1 Schematic diagram of main feed water pump speed adjustment
1.1 采用電-液位置控制器(VEHS)的轉速調節原理
該類型轉速調節系統在新建核電機組得到大量應用。由液力耦合器、電源系統、就地調速PLC、就地液晶操作顯示屏、VEHS(Voith Electro Hydraulic Positioning Controller)、轉速及反轉探頭、BALLUFF勺管位置傳感器等部分組成。
壓差調節回路原理如圖1所示。機組總蒸汽流量通過函數ARE405GD折算成汽水壓差設定值,ARE001/002/003MP取平均測得汽水壓差實測值,送入壓差調節器ARE410RG進行PID計算,輸出主給水泵轉速設定值。該調節回路內有設定值站ARE410KU,用于手動設定汽水壓差定值。
轉速調節回路由就地PLC實現,PLC接收壓差調節器送出的轉速設定值信號及就地轉速探頭測得的轉速實測值信號,求偏差后經內部PID計算,并線性化處理,輸出勺管位置設定值。該調節回路內有手操器,可以手動設定轉速定值。
當轉速調節回路處于自動調節狀態時,轉速設定值的變化需通過斜坡轉化,避免大階躍擾動。當處于備用狀態的主給水泵standby啟動時,自動切除斜坡轉化函數,投入快速啟動函數,保證備用泵及時帶載。PLC通過轉速設定值和實測值的偏差,自動調整PID參數,同時設置的線性化曲線能夠提高執行機構線性度,保障調節品質。
勺管位置調節回路由就地的VEHS實現。VEHS是Voith公司生產的采用電磁工作原理的勺管位置控制器,安裝在主給水泵液力耦合器勺管控制機構旁。VEHS接收來自調速PLC的勺管位置定值,以及BALLUFF勺管位置傳感器反饋的實測值,經內部PID電路運算,通過電磁力調節器控制4/3閥閥芯的位置,改變勺管活塞兩側腔室的充油量,帶動勺管移動,控制主給水泵轉速。
各調節回路設計了手自動無擾切換,自動模式下,手動設定值跟蹤調節器輸出;手動模式下,調節器輸出跟蹤手動設定值。進行模式切換時,設定值變化受到速率限制,不會發生大階躍。其中,速率限制的大小可以通過DCS組態修改。為了減小切換過程對機組的擾動,還需要選擇合適的切換點。
以2、3號泵停運,1號泵啟動后投自動為例:
1)啟泵后,APA101KU及APA001KU已置于手動模式,手動調整APA001KU到0%(對應3950RPM)。
2)點擊APA101KC上的“RAISE”按鈕,逐步升轉速,當轉速達到3950RPM時,通過APA101KU將就地調速柜投自動。此時,就地調速柜內的PLC開始工作,自動跟蹤APA001KU發出的手動轉速設定值。
3)調整APA001KU的手動轉速設定值,當與APA002KU、APA003KU收到的自動轉速設定值基本一致時,將APA001KU投自動,完成整個調節系統手動模式向自動模式的切換。
以1、2號泵運行,1號泵切換至3號泵運行為例:
a)將APA003KU置于手動位置,調整手動轉速設定值到0%(3950RPM)。
b)將APA103KU置于手動位置,通過點擊APA301KC的“LOWER”按鈕,將勺管位置調節至最小后,啟動APA3號泵。
c)點擊APA301KC上的“RAISE”按鈕,逐步升轉速。d)轉速升至3950RPM后,將APA103KU置自動。
e)手動調節APA003KU,逐步升轉速。
f) 當APA003KU的手動轉速設定值與APA001/002KU收到的自動轉速設定值基本一致時,將003KU置自動。
g)將APA001KU置手動,并逐步減小輸出,到輸出0%時,將APA101KU置手動。
h)通過APA101KC逐步降低1號泵轉速,轉速降到最低時,手動停泵。
1.2 采用伺服電機控制器(KE1A)的轉速調節原理
該類型的轉速調節系統在大亞灣、秦山二期等早期M310機組有應用,它由S5控制器、勺管位置控制器KE1A及外圍繼電器控制電路等幾個部分組成。
其中,S5 PLC控制器主要實現自動模式下勺管位置設定值的計算,通過接收轉速設定值和轉速反饋值,經PID運算,得到勺管位置設定值,并送到KE1A中。
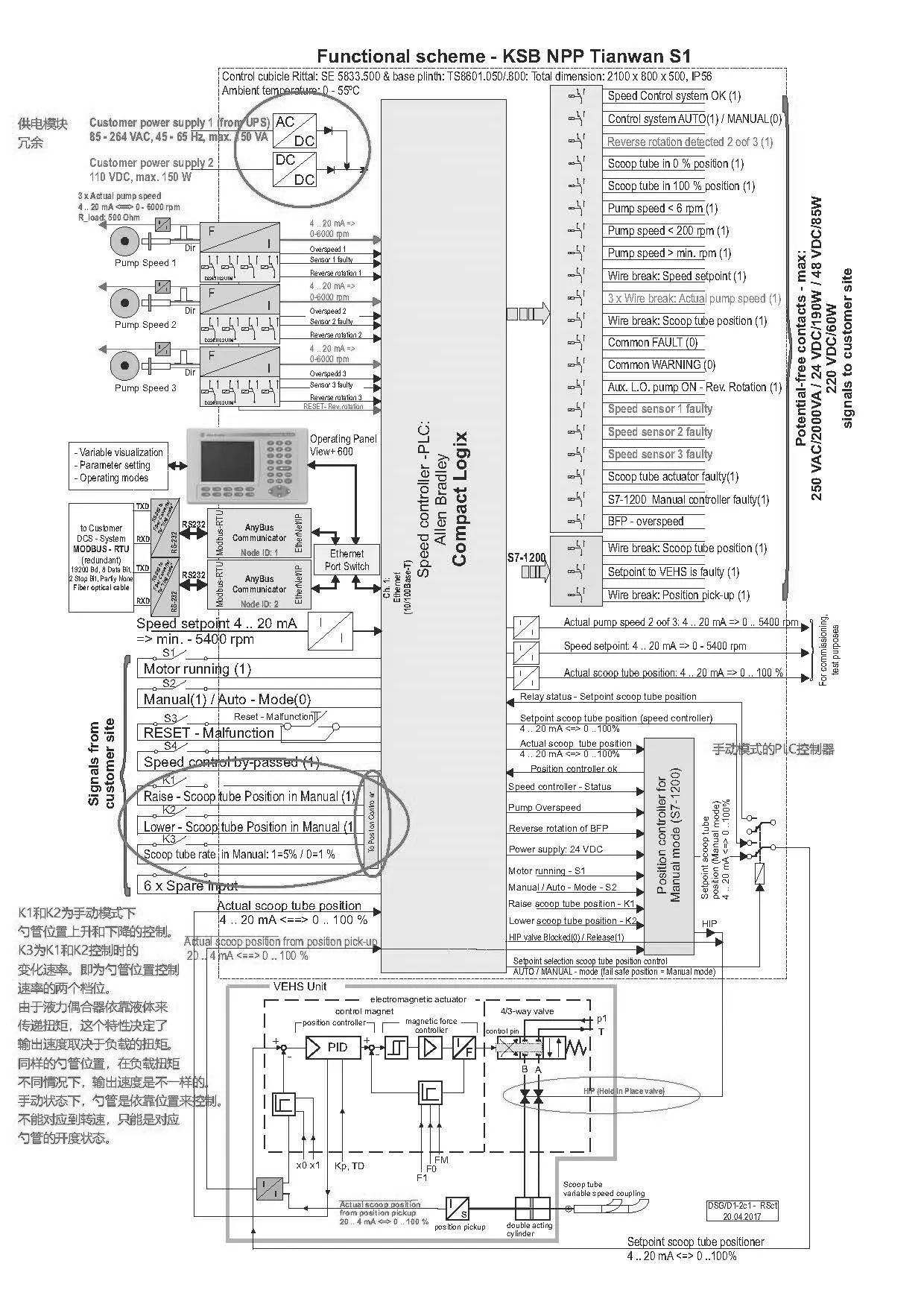
圖2 主給水泵轉速調節柜原理圖Fig.2 Schematic diagram of the main feed water pump speed control cabinet
KE1A的工作模式分為自動和手動兩種。在自動模式下,KE1A接收從S5 PLC計算出來的勺管位置設定值,并與勺管位置傳感器的位置反饋信號比較,驅動勺管伺服電機,調整勺管的實際位置,從而實現轉速調節。在手動模式下,KE1A接收從主控室送來的升降速命令,直接調整勺管位置。KE1A的功能類似于使用電-液位置控制器調速系統VEHS、S7和手自動切換繼電器。轉速調節原理與采用VEHS的調速系統類似,不再贅述。
2 存在的典型問題
1)就地PLC控制柜一般安裝在汽輪機廠房主給水泵附近,環境溫度高、空氣濕度難以保證,目前各核電機組主要通過增加控制柜空調的方式解決。
2)部分核電機組PLC控制柜只設計了一路電源,供電可靠性不高。
3)VEHS電液調節與伺服電機調節比較,存在失電情況下,只能將勺管至于最小位置,導致主給水泵轉速突降為零,存在停機停堆風險。
4)大部分M310機組主給水泵只配置一個或兩個轉速探頭,單一探頭故障就可能導致停機停堆。
5)大部分M310機組主給水泵只有一種手動升降轉速速率,每次點擊轉速變化50RPM~100RPM,導致手自動切換過程中轉速波動大。
3 改進方案
為避免上文的各項典型問題,筆者所在機組在設計初期就與廠家、設計院制定了一系列改進措施,包括:
1)增加冗余電源模塊,使用兩路不同的廠用電源供電。
2)增加冗余通訊模塊,提高與DCS的信號傳輸可靠性。
3)增加升降轉速速率選擇功能,當選擇慢速檔位時,每次點擊轉速變化10RPM~20RPM。
4)配置3個轉速探頭,采用“三取中”控制模式。
5)增加勺管保位閥,失電時保持勺管位置不變,避免轉速突降。
國內個別三十萬核電機組取消了就地調速柜內用于轉速自動調節的PLC,保留手動調節PLC,在電站一層控制系統中增加勺管位置調節。自動模式時,就地PLC接收控制系統發出的勺管位置設定值,進行線性化處理,輸出勺管位置定值給VEHS。手動模式時,PLC直接接收升降勺管命令,并輸出到就地的VEHS,控制勺管位置。
該方案簡化了系統結構,提高了設備可靠性,但是缺少轉速調節回路,沒有實現原有備用啟動時快速帶載和變PID調節的功能[2],但其將就地PLC轉速控制功能向電站一層控制系統轉化的思路值得借鑒。
利用DCS系統完整實現主給水泵調速功能,同時保證調節品質和響應能力不降低,應當是M310機組主給水泵調速進一步優化的方向。
4 結束語
M310核電機組主給水泵轉速調節對機組安全穩定運行至關重要,本文對國內核電機組常用的幾種調速方式進行了分析比較,介紹了筆者所在機組已落實的改進和進一步優化構想,為后續機組的方案設計提供參考。
