部署retro-GEO巡視器的月球借力飛行軌道分析
2021-06-23 08:15:28賀波勇馬鵬斌杜衛兵李恒年
中國空間科學技術 2021年3期
賀波勇,馬鵬斌,杜衛兵,李恒年
1. 西安衛星測控中心 宇航動力學國家重點實驗室,西安 710043
2. 西北工業大學 航天學院,西安 710072
月球引力輔助甩擺力學原理最早可追溯至1687年牛頓的數學建模描述。Apollo任務中繞月自由返回軌道便是人類利用月球引力輔助甩擺提高航天員安全性的著名載人航天實踐活動[1]。1990年,日本發射Hiten航天器,進行了雙月旁轉向飛行試驗[2]。1998年,休斯公司利用月球甩擺實現亞洲三號衛星挽救轉移軌道控制,成就人類第一次成功挽救人造衛星的航天傳奇[3-4]。2000年,國內學者曾國強等[5-6]基于雙二體圓錐曲線拼接模型研究了利用月球甩擺從地球高緯度地區發射地球靜止軌道(geostationary Earth orbit, GEO)和逆行衛星軌道設計問題,表明利用月球借力發射逆行衛星可以節約一定能量,但采用簡化動力學模型不能反映該類軌道參數屬性。羅宗富[7]研究了雙月旁轉向軌道存在性力學機理與建模設計方法,一定角度上闡明了月球借力飛行的參數敏感性力學原理。彭祺擘[8]通過地月轉移軌道一階偏導數矩陣(狀態傳播矩陣條件數)分析了月球對軌道參數的快速非線性放大作用。隨著GEO衛星數量指數增長,廢棄衛星及碎片引起的GEO資產安全性問題日益嚴峻[9]。1984年,Oberg[10]開拓性地提出了retro-GEO(retrograde GEO)概念,并指出利用月球借力飛行部署該類軌道可以節約發射能耗。2001年,Kawase[11-12]提出利用retro-GEO監測GEO軌道帶碎片構想。Aravind等[13]也通過簡單的幾何軌道模型比較了幾種retro-GEO轉移方案導致衛星剩余壽命的差別,但求解的retro-GEO軌道遠低于GEO高度。可見,retro-GEO軌道可對GEO帶全部資產每12 h巡視預警一次。但目前關于繞月飛行軌道設計方法模型精度不足,設計方法對參數敏感性高,且并未求解出符合要求的理想月球借力飛行軌道,也未對該類軌道參數屬性進行分析。
1 問題背景
1.1 GEO資產安全性嚴峻
GEO軌道周期與地球自轉周期相同,星下點覆蓋區域穩定不變。許多導航、遙感、數據中繼、氣象、海洋監測和國土資源監測等重要衛星都部署在GEO軌道。由于GEO受攝動位置漂移的安全域限制和衛星數目指數性增長,幾十年來,很多GEO重要位置都是多顆衛星共位控制而存在[14],加之火箭末級殘骸、失效衛星及空間碎片等,GEO軌道相當擁擠。
2014年7月28日和2016年8月19日,美國分別以一箭雙星方式成功發射GSSAP-1/2和GSSAP-3/4(geosynchronous space situational awareness program, GSSAP)4顆GEO軌道衛星,可通過升高或降低軌道高度對GEO資產進行鄰域碎片預警,但軌道機動成本大大限制了巡視范圍[15]。
1.2 西向發射條件不具備
如果直接西向發射部署retro-GEO,存在2個難題:
1)一般衛星均采用東向發射方式入軌,西向發射火箭一、二級殘骸落點均不是常規無人落點區域,可能是人口密集、甚至境外區域,可能給人民生命和財產安全帶來隱患,還可能引起外交糾紛和技術泄露風險。
2)東向發射可以利用成熟地面測控站行精確測控,而西向發射沒有成熟測控站支持。
1.3 月球探測器技術成熟
月球是地球唯一的天然衛星,也是迄今為止人造探測器造訪最多的天體。特別是2018年5月、12月中國分別發射的嫦娥4號中繼星和探測器聯合月球背面探測任務[16-17],經過數十個月晝月夜仍在工作,表明了中國通過嫦娥任務已成熟掌握月球探測器發射、精密軌道確定和繞月變軌等技術。
2 借力飛行軌道描述與建模設計
2.1 借力飛行軌道描述
retro-GEO相對于地球固連坐標系飛行周期約為12 h(也可略高或略低于GEO),每個周期可對GEO空間資產遍歷巡視和鄰域安全預警,如圖 1 所示。
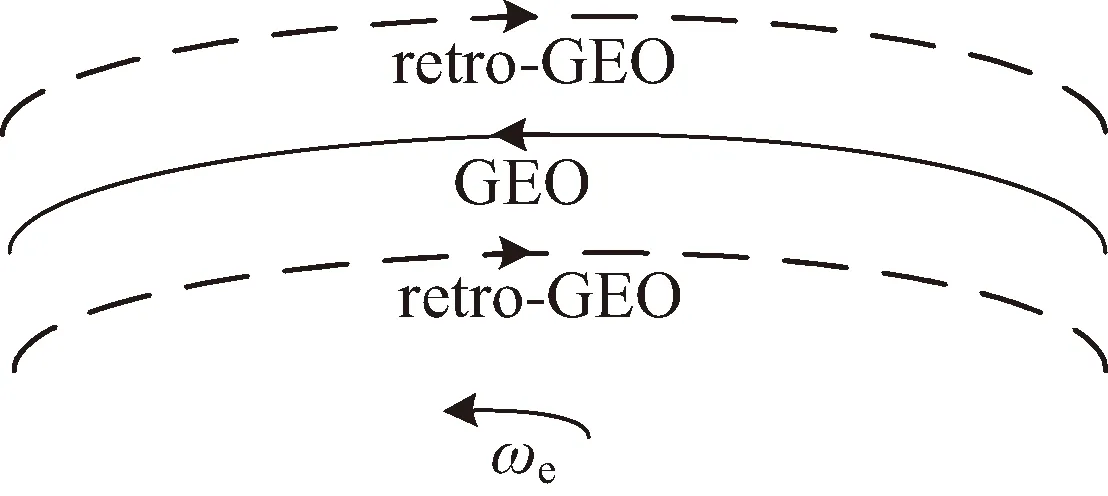
圖 1 retro-GEO示意
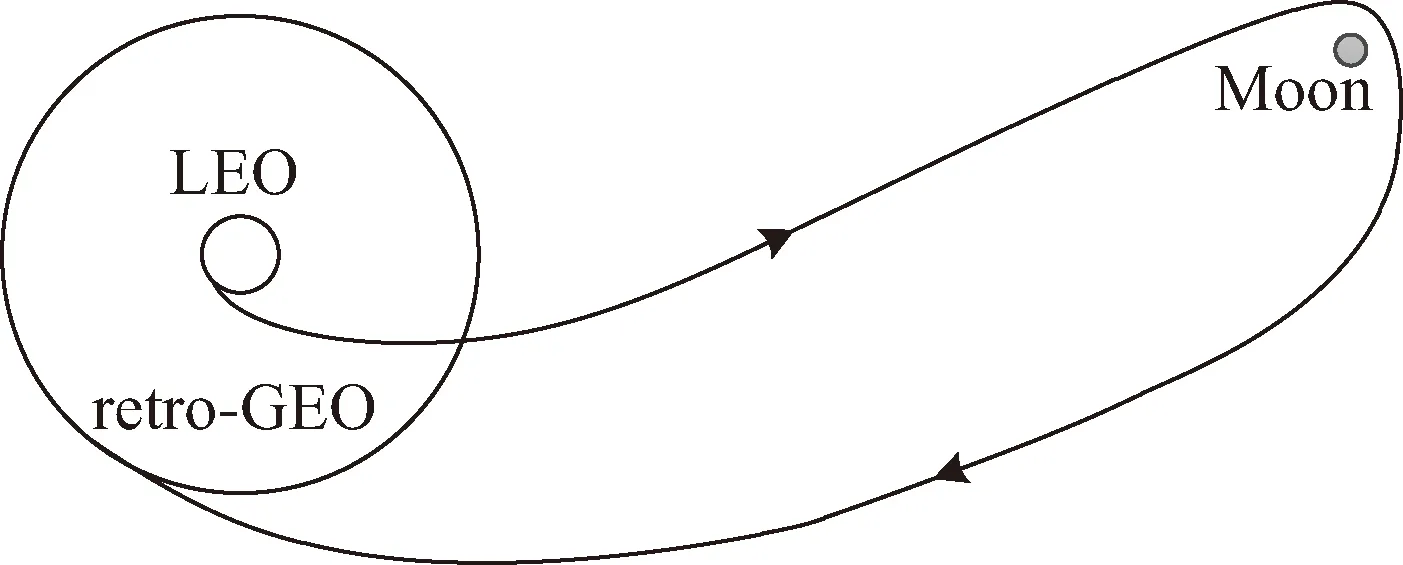
圖 2 部署retro-GEO巡視器的月球借力飛行軌跡示意
如圖 2 所示,利用月球借力飛行部署retro-GEO巡視器飛行軌跡是指從近地停泊軌道(low Earth orbit, LEO)切向施加一次脈沖,進入地月轉移段,利用月球引力輔助甩擺后返回地球附近,近地距與GEO高度相同(可略高或略低),相對于地心J2000.0坐標系傾角為180°,在近地點施加一次切向脈沖減速制動形成retro-GEO巡視軌道。
(1)約束條件

(2)設計目標
從LEO出發至retro-GEO需要兩次制動速度脈沖,設ΔvTLI和ΔvRGI(下標“RGI”表示retro-GEO insertion,逆行GEO捕獲)分別為從LEO加速出發的速度增量和月球甩擺返回地球至GEO高度的減速制動速度增量。軌道設計時希望在滿足約束情況下,軌道制動燃料消耗小,便于攜帶更大有效載荷,即
一、本刊設有專家論壇、述評、論著、學術交流、專題筆談、綜述、講座、臨床病理(例)討論、教學園地、問題解答、臨床研究、病例報告、誤診誤治、技術改進等欄目,接受全國各地來稿。
Jmin=ΔvTLI+ΔvRGI
(1)
2.2 軌道設計建模
(1)軌道動力學模型
在繞月飛行軌跡參數初步設計分析時,通常會使用圓錐曲線拼接模型和圓型限制性三體模型(circular restricted 3 body problem, CR3BP)等簡化軌道動力學模型。前者因其半解析特性,在Apollo任務分析中廣泛運用,但在計算飛行時間較長的地月轉移軌道設計問題中誤差很大,甚至得到錯誤的結論[18-20]。而后者全時段同時考慮地月引力,結論可信度高,但需數值積分運算。
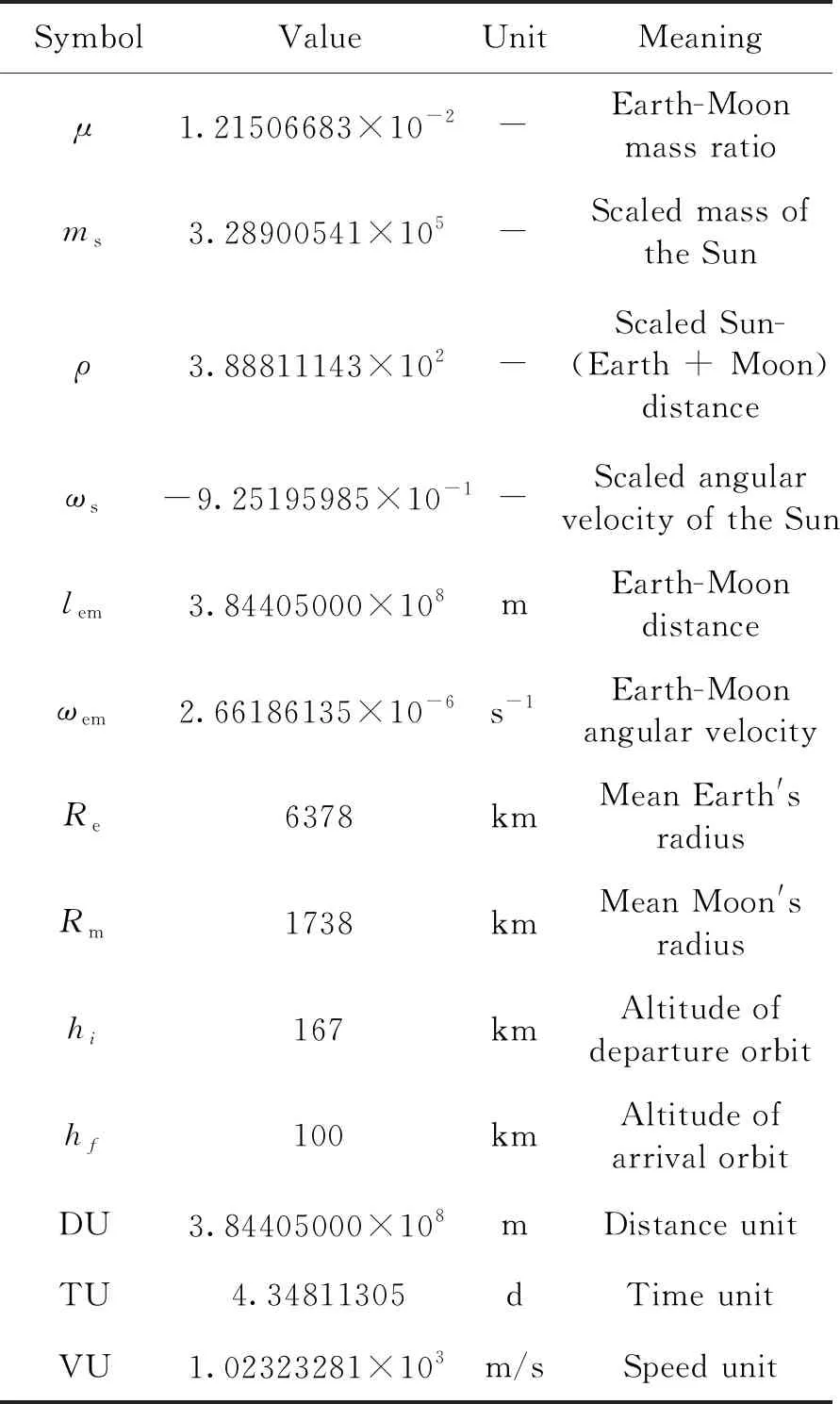
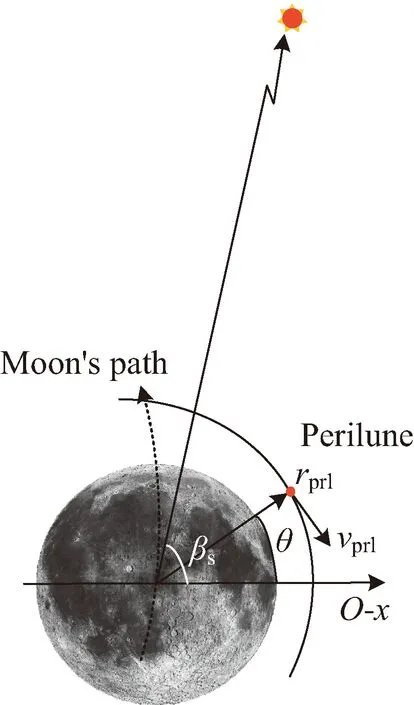
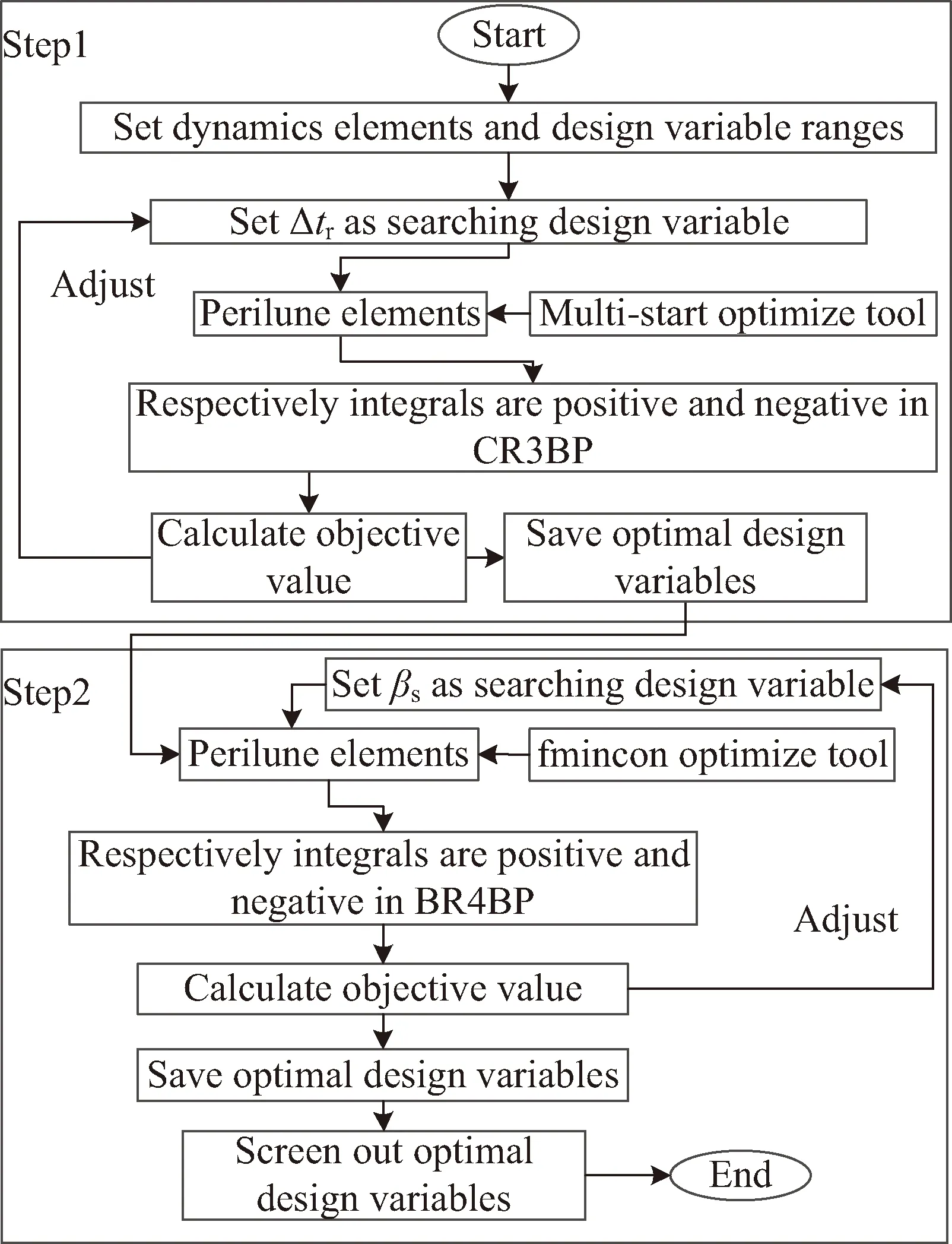
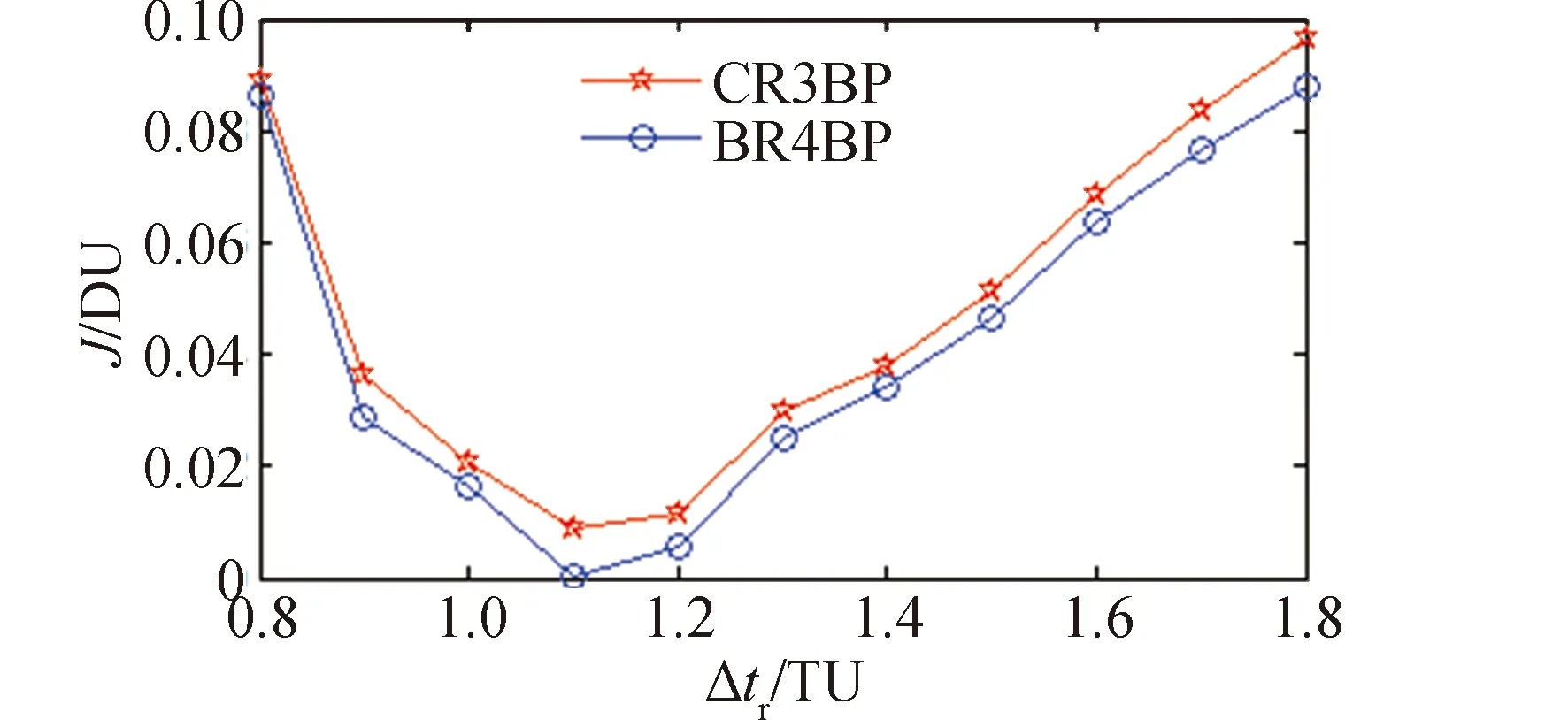
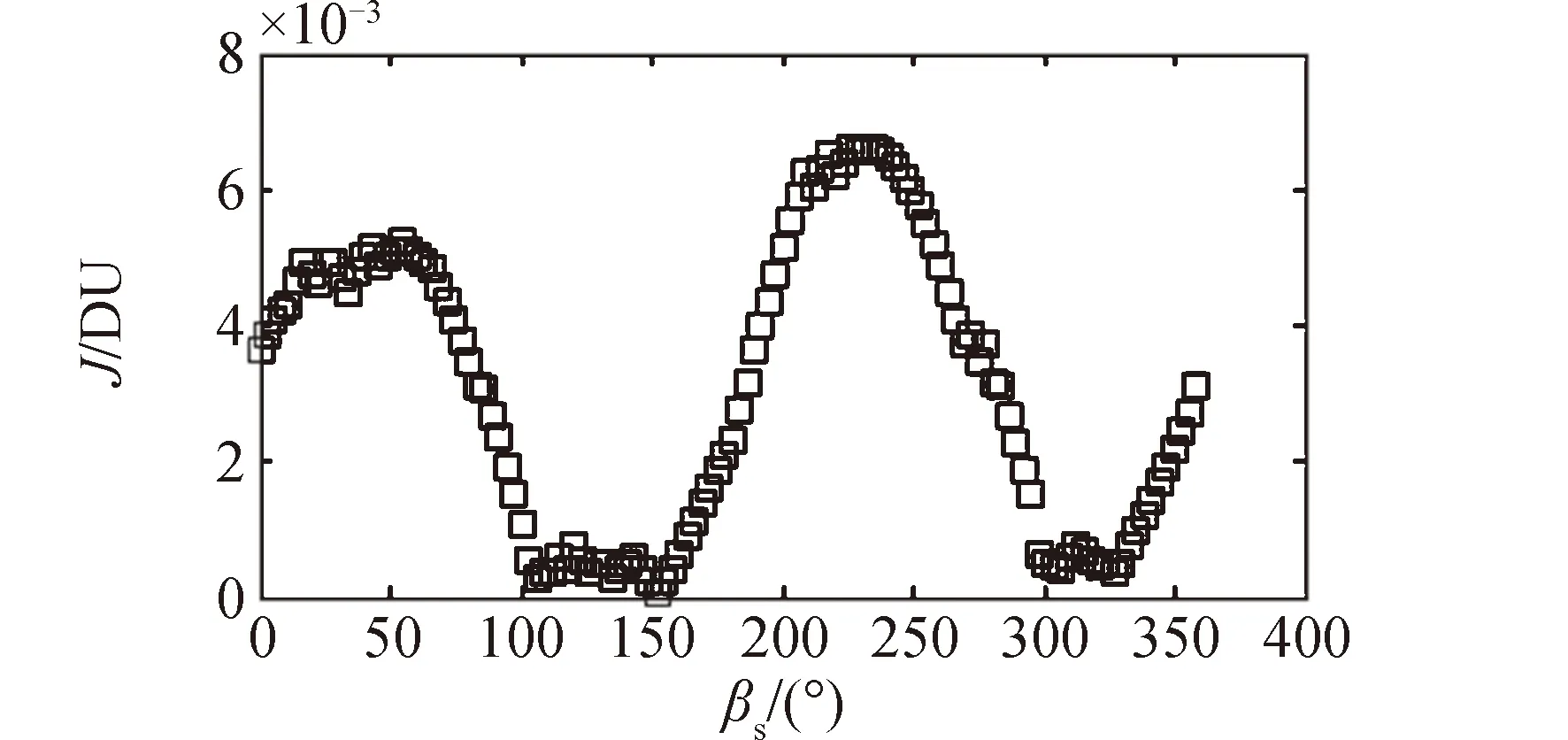
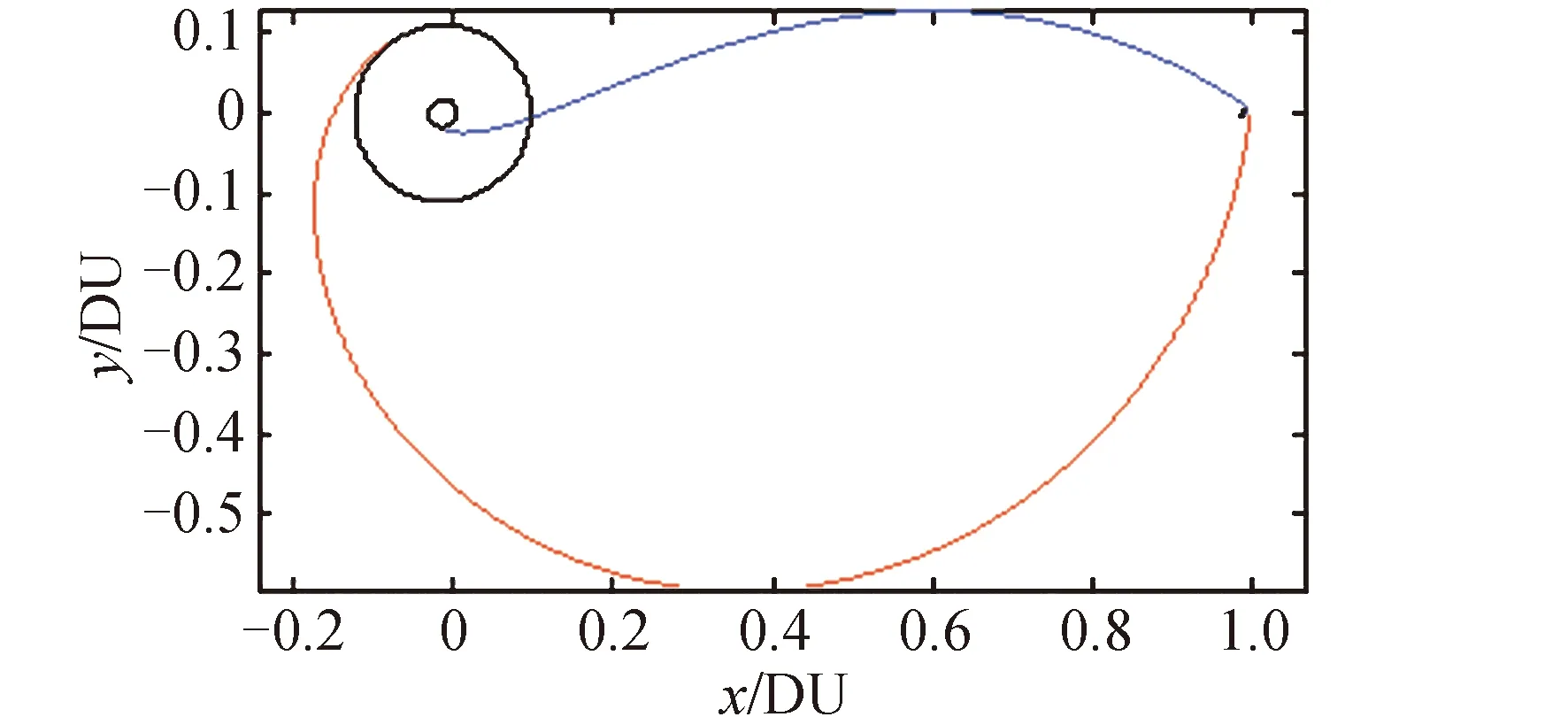
CR3BP是指存在兩個主天體P1和P2,對應質量分別為m1和m2,相互繞其公共質心勻速圓周運動,研究質量為m?m2 這里引入等效勢能函數 表1 考慮太陽攝動地月空間引力場常數[21] 由于地月轉移軌道在月球影響球附近受到的地球和月球中心引力均小于6×10-3m/s2,這時太陽中心引力攝動約為6×10-3m/s2[22],應在CR3BP基礎上考慮第四體P3,對于地月系統而言,即考慮太陽攝動的雙圓限制性四體模型(bi-circular restricted 4 body problem, BR4BP)更接近真實的地月空間引力環境。由于白道面與黃道面僅相差約5°,簡化認為是日地月處于同平面。雙圓是指地月圍繞其公共質心做圓周運動和地月公共質心圍繞太陽也做圓周運動的假設。第三體P在平面內的動力學方程為 等效勢能函數 t時刻太陽相對于O-x軸的相位角為ωst,對應的位置為(ρcos(ωst),ρsin(ωst)。此時,第三體探測器P與太陽距離為: (2) 軌道設計模型 如文獻[8]所述,月球借力飛行后,地月轉移軌道狀態傳播矩陣條件數快速增大。對于部署Retro-GEO巡視器軌道而言,如果以TLI時刻飛行狀態為設計變量,勢必增加了軌道設計變量的敏感性和設計難度。本文提出以近月點時刻飛行狀態為設計變量,分別瞄準匹配近地出發和繞月返回地球段約束條件,完成軌道設計。如圖3所示,設近月點時刻太陽相對地月連線角為βs,月心距為rprl,近月點相對于地月連線角為θ,近月點速度大小為vprl,則可完全確定一條月球借力飛行空間軌跡。 圖 3 近月點設計變量 以該時刻狀態分別逆向和正向數值積分,可以同時計算地月轉移飛行段和月球借力后返回地球段軌道參數。在實際計算時,并不知道一組近月點參數描述的月球借力飛行軌跡的近地出發時刻和繞月返回地球時刻。這時需要將逆向數值積分到近地出發時刻的飛行時長和正向數值積分到返回地球近地點時刻,分別參數化為Δtd和Δtr。由于文獻[5,13]都沒有成功求解嚴格滿足近地出發和繞月返回Retro-GEO嚴格要求的轉移軌道,本文設計軌道時,先不把式(1)所示的兩次脈沖和最小作為優化目標函數,而需將慣性參考系中近地切向加速出發條件和出發時刻地心距、返回地球近地點時刻和返回時刻地心距都作為優化目標函數,則軌道設計轉化為優化問題求解的模型為 式中,由于采用歸一化的CR3BP和BR4BP模型,月球公轉角速度為1,將近地出發和返回地球近地點約束統一未加權作為目標函數;rTLI、vTLI、rRGI和vRGI為慣性參考系中位置和速度矢量,而式(2)和式(4)中位置和速度均為會合坐標系中變量,相互轉化關系如下: (3)軌道動力學模型延拓策略 為了求解式(7)軌道設計問題,先不考慮太陽攝動,利用較簡單的CR3BP軌道動力學模型。即設計變量不考慮βs,并將Δtr設置為變量,利用MATLAB集成優化工具包中Multi-start求解(在優化變量區間內隨機給出多個初值,以每個初值局部搜索),如圖4所示。 圖 4 延拓求解策略流程 再將CR3BP模型下的軌道設計變量當作設計變量初值,在某個Δtr固定值情況下,將βs在0~2π區間內遍歷搜索,利用Matlab集成優化工具包中的fmincon求解,在結果中選出目標函數值最小的βs對應設計變量作為最優設計變量。兩步延拓求解策略流程。 為了充分利用月球引力作用,設置歸一化的近月距rprl∈[4.777,5.777]×10-3,參考文獻[23],設置近月點速度vprl∈[2.3,2.7],近月點至近地出發逆向飛行時長Δtd∈[-0.8,-0.5],θ∈[-π,π]。計算得到CR3BP模型和BR4BP模型最優目標函數隨Δtr∈[0.8,1.8]變化情況如圖5所示。 圖 5 最優目標函數變化 可見,只有當Δtr≈1.1 TU時存在最優解。當Δtr=1.1TU時,近月點時刻太陽處于方位對式(7)中目標函數影響如圖6 所示。可知,太陽位于最優攝動方向(βs≈152°),才可以找到目標函數值最小的情況(式(7)中J≤7.0×10-5),此時月地段實際飛行時長約為114.79 h,該條軌道歸一化后的平面軌跡如圖7所示。 圖 6 太陽不同方位攝動影響 圖 7 部署retro-GEO巡視器的月球借力飛行軌跡 由圖6可知,式(7)目標函數值處于較小值要求太陽位于的攝動方向分布范圍有限,即日地月相對運動引起的發射窗口較小。說明該類軌道存在條件較為苛刻,也從另一個角度解釋了文獻[5,13]沒有成功求解該類軌道的原因。 基于CR3BP和BR4BP模型,提出了利用近月點狀態為設計變量的部署retro-GEO巡視器的月球借力飛行軌道求解方法,仿真算例表明: 1)以近月點狀態為設計變量可有效減弱軌道狀態傳播矩陣的非線性快速增大效果,便于利用通用局部梯度優化工具求解,延拓策略可為復雜問題提供較為精確的設計變量初值,便于快速收斂; 2)部署retro-GEO的月球借力飛行軌道存在條件苛刻,只有近月點至返回地球近地點飛行時長約為114.79 h,且太陽處于最優攝動方向時,才可以找到理論意義上目標軌道。 本文揭示的該類軌道存在條件可為下一步求解該類軌道高精度軌道動力學模型解提供設計變量初值參考。
3 算例驗證
4 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
