采用模糊控制提高某四輪驅動車輛穩定性的研究
2021-06-22 08:28:42張艷武何曉暉邵發明
機電產品開發與創新 2021年3期
關鍵詞:控制策略
張艷武, 王 強, 何曉暉, 邵發明, 胡 聰
(陸軍工程大學 野戰工程學院, 江蘇 南京 210007)
0 引言
隨著輪轂電機設計和控制方面的不斷技術進步和發展,控制策略與技術的不斷創新,四輪獨立驅動的車輛已成為研究的熱點,近年來受到學術界和工業界的關注。
金輝等[1]基于極限車速對車輛穩定性進行控制研究,提出了基于補償橫擺力矩的前后輪制動力矩比例分配控制策略。 陳松等[2]為實現對車輛的側傾控制,自主設計了主動橫向穩定桿, 并運用集成控制能有效控制車輛的側翻與失穩,有效提高了車輛的橫擺與側傾穩定性。王曉玉等[3]對四輪汽車轉向工況下力矩的最優分配進行了研究,通過力矩優化分配來控制輪胎縱向力, 保證車輛能夠安全穩定的行駛。 張細致等[4]基于車輪轉矩優化分配的層次化車輛穩定性控制方法, 用于提高分布式驅動電動汽車的操縱穩定性控制。 Zhenpo Wang 等[5]通過分層控制提高四輪獨立驅動電動車輛的穩定性, 通過設計上層和下層組成的分層結構控制器, 分別控制不同的車輛參數來提高車輛的穩定性。 文獻[6-7]中也研究了分層控制來提高車輛穩定性的方法。 Zheming Chen 等[8]基于參數估計對四輪獨立驅動電動汽車扭矩分配方法進行了開發與評估,將參數估計與車輛穩定性控制相結合, 并基于非線性對扭矩分配方法進行了測試, 證明了觀測器的準確性與穩定性控制的有效性。 Fei-Xiang Xu 等[9]研究了根據在偏航率跟蹤策略上,基于H2 /H∞魯棒控制對四輪轉向車操縱穩定性能進行了改進,提高了車輛轉向的操縱穩定性。
本文基于四輪驅動車輛, 利用模糊控制算法建立分層控制策略,結合車輛的狀態參數進行綜合控制,提高車輛的操縱穩定性,降低車輪的滑移率,在Carsim-simulink聯合仿真模型中進行了仿真驗證。
1 車輛數學模型建立
通過建立二自由度車輛模型, 對車輛的整體狀態做出估計,將其作為對比分析,實驗與分析都證明了二自由度模型的準確性,2DOF 車輛模型被廣泛用作汽車控制器設計的參考模型[10-13]。
由圖1 分析可知, 二自由度車輛受到的外力沿y 軸方向的合力和繞質心處的力矩為:

車輛沿x 軸和y 軸的加速度ax、ay分別為:

又因為:

圖1 二自由度車輛模型
根據坐標規定,前后輪的側偏角α1、α2為:

式中,Fy1、Fy2—地面對前、 后輪的側向反作用力, 即側偏力;δ—前輪轉角;a、b—質心距前、 后輪中心的距離;u、v—車輛質心沿x、y 軸方向的速度;k1、k2—前、 后輪的側偏剛度;wr—橫擺角速度;Iz—車輛繞z 軸的轉動慣量。
得到穩態的橫擺角速度為:

式中,wr1—車輛的穩態橫擺角速度;L—車輛前后輪距。
2 分層控制策略
為實現車輛的附加橫擺力矩的控制, 設計了分層控制策略, 上層控制器負責車輛的相關參數收集與整車狀態的計算,下層控制器負責各車輪的轉矩的分配與控制。
2.1 上層控制策略
上層控制器通過采集駕駛員的輸入信號, 并結合參考模型, 得到理想的輸出結果。 根據車輛的參數采用Carsim 仿真軟件建立車輛模型, 并將車輛模型輸出到MATLAB/Simulink 中進行聯合仿真。
在上層控制器中得到理想橫擺角速度wrl:

式中:ΔTj—計算整車需要的調整橫擺力矩。
為減少控制系統的復雜性,增強車輛穩定性,在上層控制中結合車輛的橫擺角速度偏差與車輛的滑移率,設計模糊控制算法, 通過模糊控制減少車輛處于穩定與相對穩定狀態時的控制, 更加精準的控制不穩定性時的車輛。 得到車輛的控制規則見表1。

表1 模糊規則控制表
通過模糊控制算法, 結合車輛橫擺角速度與滑移率的穩定性狀態參數,得到加權系數Z,與車輛的穩定性調節參數相結合,得到實際的車輛力矩調整ΔT 為:

由圖3 可以看出,隨著車輛的狀態逐漸穩定,加權系數是逐漸變小,最終為0,說明模糊控制算法收斂,可以提高車輛的穩定性。
2.2 下層控制策略
根據地面對車輪的反作用力差異, 為充分利用地面附著力, 通過分配算法對每個車輪施加附加橫擺力矩來提高車輛的穩定性,計算公式如下:

式中:ξi—車輪的附加力矩施加系數;Ti—車輪的計算施加轉矩;TΔi—車輪的附加力矩;Tbmax—車輪制動時的最大力矩;Tdmax 為車輪驅動時的最大力矩。
2.3 仿真模型
車輛模型所用部分參數見表2。
車輛的控制觀測參數包括車輛的位移路徑、 橫擺角速度、質心側偏角、滑移率、側傾角、速度和俯仰角等, 控制參數包括車輛的速度、方向盤輸入、 驅動/制動強度, 各輪轉矩控制等數據, 這些參數可以通過各種傳感器精確測量,以實現對車輛的參數觀測穩定性的控制。
結合穩定性控制算法與車輛模型, 通過Carsim 與MATLAB/Simulink 聯合仿真得到的仿真模型見圖2。
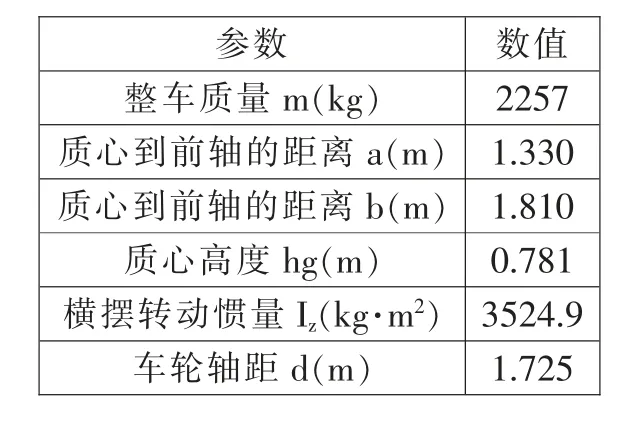
表2 車輛模型參數表
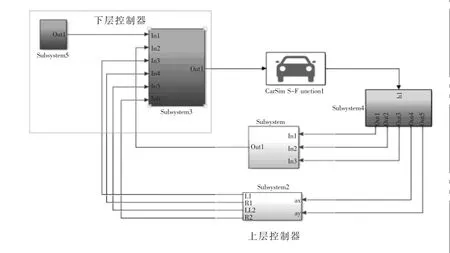
圖2 車輛Carsim 與MATLAB/Simulink 聯合仿真模型
3 仿真實驗與結果分析
為驗證所提出的附加橫擺力矩控制對車輛穩定性的影響,基于Carsim 與MATLAB/Simulink 搭建的聯合仿真模型進行不同附著系數下的雙移線路面實驗和蛇形工況實驗。
3.1 雙移線高附著路面實驗
設置實驗車速為120km/h, 路面摩擦系數為0.85,雙移線路徑按照ISO 3888-1-1999 標準建立模型, 得到雙移線路徑設置如圖3 所示, 通過實驗得到穩定性模糊控制和原車的比例控制下的各參數變化如圖4~圖6 所示。

圖3 雙移線實驗路徑

圖4 雙移線高附著路面車輛縱向位移變化曲線

圖5 雙移線高附著路面橫擺角速度變化曲線
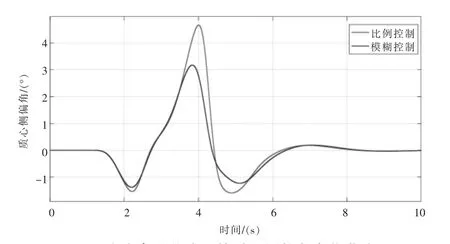
圖6 雙移線高附著路面的質心側偏角變化曲線
由圖4 的車輛縱向位移變化可以看出,在5~6s 時模糊控制的車輛的縱向偏移量明顯較小, 由此可以看出模糊控制可以使車輛的軌跡更趨向于目標路徑; 由圖5 的車輛橫擺角速度變化可以看出,在3.5~7s 時間段內,模糊控制可以有效降低車輛在高附著雙移線路面時的橫擺角速度變化的峰值; 由圖6 的質心側偏角變化曲線可以看出, 車輛在穩定性模糊控制下的質心側偏角的三個峰值均小于比例控制下的車輛質心側偏角。 綜合車輛在同控制下各參數的對比, 可以得出本文設計的車輛穩定性控制策略的有效性。
3.2 蛇形工況仿真實驗
蛇形工況試驗是一種檢驗車輛操縱穩定性的典型方法,其適用于M 類、N 類、G 類車輛,本文中的四輪驅動車輛屬于M2 類車輛。蛇形工況的標樁布置按照GB/T6323-2014 布置,位置布置見圖7。
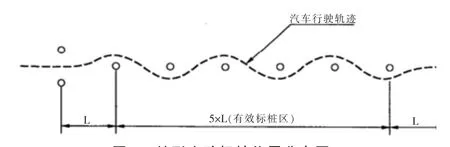
圖7 蛇形實驗標樁位置分布圖
在Carsim 中針對車輛的蛇形工況搭建了駕駛員模型與道路模型,并與MATLAB/Simulink 建立聯合仿真,得到車輛在有無穩定性控制策略下的車輛的各參數對比圖像。
設置仿真實驗的車速為80km/h, 路面為附著系數為0.85 的高附著路面,駕駛員的預瞄時間為0.5s,最高的方向盤轉角為720°,得到仿真結果如圖8~圖10 所示。

圖8 蛇形工況下的縱向位移變化曲線

圖9 蛇形工況下橫擺角速度變化曲線

圖10 蛇形工況下的質心側偏角變化曲線
由圖8 可以看出,在穩定性模糊策略控制的情況下,車輛的運動軌跡明顯比比例控制的情況下更趨近目標軌跡,有利于車輛的穩定性控制。
由圖9 可以看出, 在車輛穩定性控制策略下的橫擺角速度變化具有一定的規律性,且變化過程較平緩,對比比例控制下的曲線, 比例控制下的車輛橫擺角速度在蛇形穿越的過程中峰值越來越大,且變化相對波動較大,由對比可知,車輛的穩定性控制策略是有效的。
由圖10 可知,在車輛穩定性控制中,車輛的質心側偏角處于正常范圍中且維持于較平均變化的趨勢, 從在比例穩定性控制的實驗曲線變化中可以看出其質心側偏角的峰值比有控制情況下更大, 且隨著車輛沿蛇形工況的路徑不斷運動中, 車輛的質心側偏角的峰值呈現不斷增加的趨勢,說明車輛逐漸失去穩定性控制。
綜合蛇形工況下的車輛參數變化對比,可以得出,本文設計的模糊控制能夠有效提高車輛蛇形工況下的穩定性。
4 結論
通過建立某四輪驅動車輛的數學模型并進行理論分析,以提高車輛的穩定性為目標,結合模糊控制算法設計了四輪驅動車輛穩定性控制的分層控制策略,通過Carsim與MATLAB/Simulink 建立聯合仿真模型, 基于控制策略進行了不同附著系數下的雙移線路面的仿真實驗和蛇形工況仿真實驗,實驗表明:在雙移線工況下,模糊控制策略可以有效降低車輛沿目標路徑運動的偏離量, 降低車輛的橫擺角速度、側傾角速度、俯仰角速度和質心側偏角的峰值,能夠提高車輛的整體的穩定性;在蛇形工況的仿真實驗中, 采用模糊控制算法的穩定性控制策略可以提高車輛沿目標路徑運動的準確性,有效降低運動時的橫擺角速度、 質心側偏角和車身側傾角, 提高車輛的穩定性。綜上,通過模糊控制算法的分層控制可以有效提高車輛的整體穩定性。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
