基于Backstepping的三輪機器人編隊控制
2021-06-19 03:39:42于美妍楊洪勇孫玉嬌
復雜系統與復雜性科學 2021年3期
于美妍,楊洪勇,孫玉嬌
(魯東大學信息與電氣工程學院,山東 煙臺 264025)
0 引言

多機器人在實際應用中發揮著越來越重要的作用,多機器人編隊控制問題日漸成為學術界的研究熱點。但由于機器人構造復雜,多機器人系統涉及的技術很多,人們比較常用的研究方法是把通信的多個智能體構成的計算系統即多智能體系統視為一個分布式網絡,研究多智能體系統的分布式合作。文獻[6]中針對具有干擾的多智能體系統的協同控制問題,提出了帶有不匹配干擾和參數不確定的一致性控制算法。文獻[7]研究了一類拓撲為循環圖的多智能體系統在圓上運動的編隊控制問題。文獻[8]研究了具有比例加微分控制器的連續一階多時滯多智能體系統的一致性問題。文獻[9]研究了具有事件觸發控制策略的二階積分器多智能體系統的編隊控制問題。文獻[10]和[11]研究了混合階多智能體系統的一致性問題。
在研究多智能體編隊控制問題時,機器人的非線性系統往往比較復雜,直接得出整個系統的控制器存在一定的困難,而Backstepping方法是把系統進行分解,分別對每個子系統引入虛擬控制量,設計Lyapunov函數得到子系統的虛擬控制器,逐步反推得出系統真正的控制律,大大降低了系統設計的復雜程度,因此Backstepping方法被廣泛應用于多機器人系統的控制過程中。文獻[12]針對雙輪驅動移動機器人,采用Backstepping思想設計了多機器人協同編隊方法。文獻[13]利用Backstepping方法,針對反饋混沌系統,提出了混沌同步一般控制方法。文獻[14]研究的是無狀態量測的不確定隨機反饋系統,結合Backstepping思想,提出了一種自適應模糊控制方法。文獻[15]針對模型不確定性不匹配的液壓系統,利用Backstepping方法將擴展狀態觀測器和非線性魯棒控制器綜合起來。文獻[16]首先對飛行器縱向模型分析,然后利用Backstepping思想設計了高超聲速飛行器的模糊自適應控制器。
雖然機器人編隊問題研究已久,但大多數文獻都是針對機器人的線性運動特點進行研究,文獻[17]結合事件觸發策略,對一般線性多智能體系統的編隊控制問題進行了研究。文獻[18]研究了擁有一般線性動力學的分數階多智能體系統編隊控制問題。文獻[19]對于具有有向交互拓撲的高階線性群集系統的時變輸出編隊控制問題進行研究。Shi[20]等研究了存在時變時延和外部擾動等約束條件的高階線性群系統編隊控制問題。但是,現實世界很多智能體系統動力學方程并不滿足線性特點,非線性系統在實際應用中占有很大比例,據我們所知,有較少文獻對非線性多智能體系統進行研究。因此結合上述文獻思想和控制器的設計方法,本文針對三輪機器人的非線性運動學特點,研究多智能體編隊控制問題。本文的創新點主要有以下兩點:1)基于機器人領航—跟隨模型,構造了系統位姿誤差運動學方程,將非線性系統編隊控制問題改變成跟隨者對虛擬領航者運動軌跡的追蹤問題,有效地解決了基于領航—跟隨模型的機器人編隊存在的跟隨者對領航者過于依賴的問題。2)運用Backstepping思想,構造了一個新的虛擬反饋誤差變量,并基于這個誤差變量設計了多機器人編隊控制策略,實現了機器人對于預定軌跡的全局漸進穩定,降低了系統設計的復雜程度。
1 三輪機器人的動力學模型
在實際生活中,由于干擾等一系列因素存在,機器人的動力學模型會很復雜,為了便于后面的工作,本文做了幾個假設:1)三輪機器人底盤上的3個輪子是間隔120°均勻分布,不考慮生產過程中出現的角度偏差。2)假定機器人行走的地面具有合適的摩擦力,機器人不會出現打滑的情況。3)由于一個機器人成品由很多復雜零件構成,將三輪機器人視為剛體以便分析。4)三輪機器人底盤重心與幾何中心重合。
本文首先建立以底盤重心為原點的局部坐標系,如圖1所示,以輪子A與B的角平分線建立x軸,逆時針90o建立y軸,(vxr,vyr,ωr)與(vxw,vyw,ω)分別是機器人在絕對坐標系與局部坐標系中的相關速度向量,Vv=[vAvBvC]T為3個驅動輪的線速度向量。θ=θw=θr為機器人轉動的方位角,ω是三輪機器人的角速度,d是機器人底盤中心到輪中心的距離。
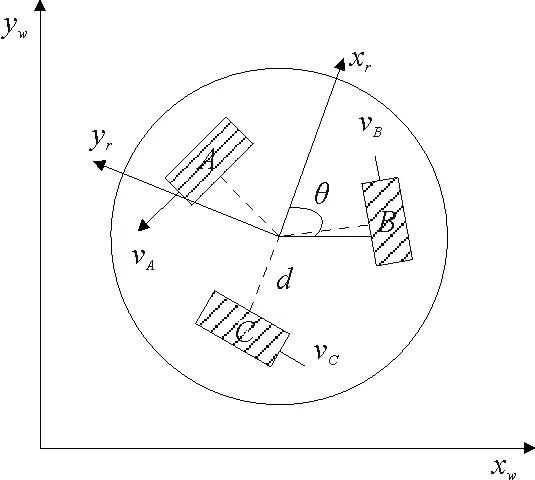
圖1 三輪機器人數學模型
根據圖1可得機器人動力學模型方程為
(1)
并且(vxr,vyr,ωr)滿足式(2)
(2)
(3)
由圖1,可以得到機器人3個輪子的速度變化公式為
(4)
(5)

(6)
2 機器人的領導-跟隨模型
基于領導-跟隨模型的機器人編隊的基本思想是在全部機器人中選擇一個領航者,帶領所有成員運動,其余機器人作為跟隨者,跟蹤領航者運動。領航者的移動軌跡是已定的,輸入控制也只與自身的信息相關。
為了解決系統中跟隨者對領航者的過度依賴問題,為每個跟隨機器人分別設置虛擬領航者,并假設虛擬領航者的速度以及角速度始終與領航者保持一致。我們可以通過調整虛擬領航者與領航者之間的距離、角度來構造多智能體系統的編隊隊形,然后讓跟隨者按照設計的控制策略跟蹤虛擬領航者的運動軌跡,實現編隊目標。通過這種方法,本文將編隊問題轉變成跟隨機器人對虛擬領航者的追蹤問題。


圖2 基于領航—跟隨模式的三角形編隊結構
由Rr的位姿可以得到Rv位姿為
(7)
根據圖2,得到跟隨機器人R2對于虛擬領航者Rv的跟蹤誤差為
(8)
其中,ex,ey表示跟隨者與虛擬領航者之間的x軸、y軸方向上的誤差,eθ表示跟隨者與虛擬領航者之間的角度誤差。

(9)

3 基于Backstepping控制器設計
定理1針對機器人動力學模型(1),如果控制輸入ω,v滿足式(10)
(10)
其中,k1>0,k2>0,那么三輪機器人系統可以實現編隊控制。
(11)
當eθ→0時,設計部分李亞普諾夫函數為
(12)

(13)
(14)
對式(14)求導得:
(15)
(16)
將式(11)、(16)代入式(15)得:
(17)
然后再將式(9)代入式(17)可得:
(18)
結合式(9)、(10),對ω求導得:
(19)
代入式(18),得:
(20)
將式(20)進行整理,得:
(21)

4 實驗驗證
在編隊開始前,首先要確定的是多機器人系統運動所要保持的隊形。常見的編隊隊形有直線形、三角形、矩形、五邊形等。相對來說,直線形編隊比較簡單,其思想是確定好領航機器人運動軌跡,其它跟隨機器人只需按照固定的距離跟蹤即可。對于三角形、矩形、五邊形編隊隊形稍微復雜一些,設計過程中,不僅需要控制好與領航機器人之間的距離,還要控制好兩者之間的角度問題,來保證有規則的編隊隊形。
本文基于領航—跟隨的方法對理論結果進行驗證,分別對多機器人系統的矩形編隊、三角形編隊、五邊形編隊進行仿真。
4.1 參數設置
在進行所有編隊時,均設定k1=1.5,k2=2,領航機器人的初始位姿L0=[2,0,π/3];領航者速度Lv=4,角速度Lω=2。



4.2 編隊仿真
基于上述參數設置,對系統進行仿真,得到的實驗結果如圖3~圖5所示。

圖3 機器人保持三角形編隊相關結果圖

圖4 機器人保持正五邊形編隊相關圖
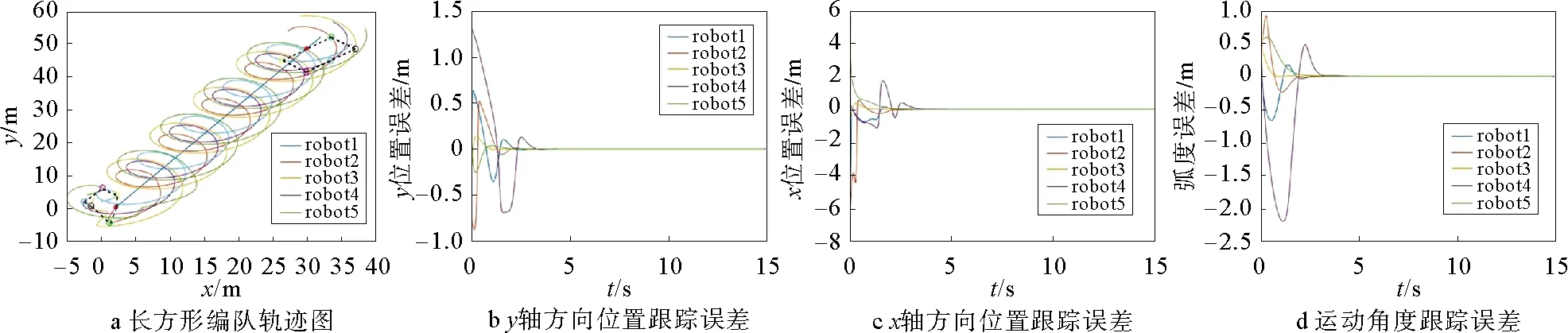
圖5 機器人保持長方形編隊相關圖
圖3a領航機器人沿直線運動,5個跟隨者機器人與領航機器人要進行三角隊形編隊。其中“*”表示領航機器人,“o”代表跟隨機器人。圖中給出了時間在1 s、14 s時各機器人編隊情況。由圖3a可以看出,在剛開始一段時間內跟隨機器人并未跟蹤上領航者機器人,系統沒有達到穩定,后期6個機器人維持規則的正三角隊形持續移動,說明跟隨機器人追蹤上領航機器人。
圖3b和3c為三角形編隊時的系統位置、角度誤差圖,其中藍、紅、橘黃、紫、綠線分別表示跟隨機器人1~5的位姿狀態,可以看出,在控制器的控制下,隨著時間的推移,位置以及角度的跟蹤誤差在4 s內收斂到0,表明了系統達到漸近穩定,證明控制器可以進行有效控制。
圖4a為4個跟隨機器人與領航機器人形成正五邊形編隊軌跡效果圖,與圖3a類似,開始的一段時間,機器人并未保持規則五邊形運動,后期,跟隨機器人追蹤上領航機器人,保持規則正五邊形運動。
圖4b和4c是進行正五邊形編隊的誤差系統示例圖,由圖可以看出智能體大約在3 s時,跟隨者與虛擬領航者在x軸、y軸方向上的位置誤差,以及角度誤差便趨于0,達到控制器設計目標。
圖5a為跟隨者機器人與領航機器人運動形成的矩形編隊隊形,由圖5a可以看出,在1 s時跟隨機器人并未跟蹤上領航者機器人,各機器人沒有保持矩形軌跡運動,但是軌跡在逐漸趨于規則,14 s時,各跟隨機器人已經追蹤上領航機器人并保持編隊隊形持續運動。
圖5b和5c為矩形編隊時,跟隨機器人與各自領航機器人的誤差圖,根據圖示,與圖4b和4c類似,智能體大約在3 s時,誤差系統就已經為0,說明此時跟隨機器人與領航機器人已經保持編隊隊形運動。
5 結語
本文基于Backstepping方法對三輪機器人編隊控制問題進行研究,提出了新的機器人編隊控制策略。通過仿真實驗可知在控制器的作用下,機器人逐漸形成三角形、矩形、正五邊形編隊,并以很小的誤差保持隊形持續運動。下一步工作將對具有外部干擾、通信時延等影響的三輪機器人編隊控制問題進行研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
