基于高斯濾波的三維水聲無線傳感網絡節點定位算法
2021-06-18 07:40:06王磊劉利利齊俊艷宋成
河南理工大學學報(自然科學版) 2021年4期
關鍵詞:優化
王磊,劉利利,齊俊艷,宋成
(河南理工大學 計算機科學與技術學院,河南 焦作 454000)
0 引 言
地球上水資源豐富,因而,水下通信技術對水下資源探測和研究有著非常重要的意義[1]。由于受水下電磁波傳輸路徑短、信號衰減快、介質傳輸速率慢等因素限制,射頻信號并不適用于水下通信[2]。跟射頻信號相比,聲信號在水下衰減速率慢,因此水聲通信(under water acoustic communication,UWAC)技術被用于水下無線傳感網絡(under water sensor network,UWSN)[3]。許多水下作業,比如水下污染物質量濃度探測、海底地震檢測、水下目標追蹤都依賴于位置信息。因此,基于水聲通信的水下定位技術研究尤為重要。
水下定位方法按照定位方式可分為基于非測距的定位方法和基于測距的定位方法[5-6]。非測距定位方法主要有質心算法[7-8]和DV-hop算法[9]。該類方法對硬件要求低,受環境影響小,成本低,但是一般不能準確定位節點坐標,尤其對水下遠距離節點通信容易產生較大誤差[10]。基于測距的定位方法主要有RSSI算法、TOA算法和TDOA算法等。傳統定位方法用于水下,性能不穩定,定位誤差較大。為了滿足水下定位需求,有學者提出對RSSI值采樣并進行濾波處理,以提高RSSI值準確度。濾波處理方法有粒子濾波(particle filter,PF)[11-12]、秩濾波(rank filter,RF,)[13]、卡爾曼濾波(kalman filter,KF,)[14]和高斯濾波(gauss filter,GF)等。J.Sve?ko等[11]首先通過采集RSSI值獲得“粒子”,根據每個粒子的重要性確定粒子權值,其次再對粒子進行重采樣,最后利用粒子濾波進行位置估計;余修武等[13]提出采用RF方法對RSSI值濾波處理,以提高測距精度,再使用FTO算法對目標節點坐標進行尋優計算,得到近似最優解;ZHOU C等[14]使用KF算法處理RSSI樣本,在一定程度上解決了“RSSI信號漂移”的問題,然后利用處理后的RSSI值進行距離估計和位置計算。上述算法中,PF算法存在著粒子退化或重采樣粒子貧化問題,隨著時間推移,KF和RF算法的累計誤差會逐漸增大,且相比于高斯濾波,上述濾波算法復雜度更高。為了進一步提高定位精度,近年來,智能優化算法被引入。常用的優化算法有擬牛頓算法、粒子群(PSO)算法、差分進化(DE)算法、灰狼優化(GWO)算法以及遺傳(GA)算法等。常魯杰等[15]設計一種基于迭代粒子群優化的RQ-PSO定位算法,該算法利用MDS-MAP對傳感器節點完成粗定位,引入幾何約束限制粒子群初始種群范圍,并采用魯棒四邊形規則對未知節點位置進行優化求解;LI J等[16]提出基于模擬退火算法的粒子群優化(SAPSO)算法,解決了在低信噪比環境下定位精度低的問題;段亞青等[17]提出的GWO算法同樣也用于定位優化。但以上優化算法收斂速度慢,容易陷入局部最優。擬牛頓算法收斂速度具有快且容易跳出局部最優的優點,因此,本文提出一種基于高斯濾波和擬牛頓優化的UWSN定位方法,主要工作如下:
(1)提出基于高斯濾波的ASTL采樣測距算法,通過采樣,得到多組ASTL樣本值,采用高斯濾波算法對ASTL樣本進行加權平均,以降低因測距不準帶來的誤差。
(2)對估計位置進行擬牛頓優化,以得到更加準確的定位結果。
(3)通過仿真驗證本文提出的算法。
1 測距模型設計
1.1 水聲傳輸損耗模型
在水下,無線傳感網絡傳輸時由于物理層采用聲信號,與電磁波信號的傳輸速度差距很大,因此,陸上的測距模型并不適用于水下。所以采用Urick模型,設發送節點向接收節點發送的數據包中包含發送信號強度值ST(dB)和接受節點收到數據包時記錄的接收號強度RT(dB)。兩節點間的傳輸路徑損失TLloss(dB)計算式為
TLloss=ST-RT,
(1)
其中,水聲傳輸路徑損耗模型為
TLloss(d,f)≈χlgd+a(f)·d×10-3+A,
(2)
式中:TLloss(d,f)為路徑傳輸損耗;d為傳輸距離,m;χ為幾何擴散,χ=10時水聲傳播方式為柱形傳輸,χ=20時水聲傳播方式為球形傳輸,本文采用球形傳輸模型[18];f為信號頻率,Hz;a(f)為頻率相關吸收系數,由公式(3)求得[17];A為聲信號在傳輸過程中的異常損耗,dB。

(3)
因此,由式(3)可得測距模型
(4)
由于聲信號在傳輸過程中具有不穩定性,在某時間段內,受過往艦船或動物等產生的噪聲影響,導致測量的TLloss值偏離正常值。若在測距環節按照正常數據引入測距模型中,將導致測距誤差過大,定位結果不準確。傳統的測距方法容易忽視聲信號在傳輸過程中引入的偶然誤差,因此,提出一種基于高斯濾波的TLloss采樣距離估計方法。TLloss樣本具有不等權性,使用高斯濾波能有效處理異常TLloss樣本,降低因測距引入的誤差,提高定位精度。
1.2 改進測距模型
(5)
(6)
(7)
式中:x為樣本值;μ為均值;δ為標準差。

(8)

(9)
2 節點定位
2.1 位置估計
節點初始位置估計采用多邊定位法,使用該方法可求得未知節點坐標的最小二乘解。根據已知錨節點坐標Pi(xi,yi,zi)與未知節點坐標P(x,y,z),可列出方程組(10)。
(10)
其中,二維定位利用三邊定位至少需要3個不共線的錨節點,而三維定位至少需要4個不共面的錨節點,所以n≥4[19]。前n-1個式子分別減去最后一個式子,得
(11)
其中,為將方程組(10)轉化成矩陣乘法,作如下處理:
(12)
(13)
求解非齊次方程AX=B,解得
X=(A′A)-1*A′B
,
(14)
X即為求解的初始坐標。
2.2 位置坐標優化
2.2.1 BFGS擬牛頓法
用BFGS擬牛頓法對三維坐標求解,故可視為多變量求解問題,設向量X(x,y,z)為未知變量,擬牛頓法迭代如式(15)所示,其中Xk為第k次迭代的X值,H-1為求解問題f關于變量的二階Hessian矩陣,gk為求解問題f關于求解變量的梯度向量。
(15)
BFGS算法是對牛頓法的改進,其思想是通過迭代方式,矩陣B近似為Hessian矩陣的逆矩陣H-1,即
H-1≈B。
(16)
正定矩陣B迭代公式為
Bk+1=Bk+ΔBk,k=0,1,2,3,…,n。
(17)
(18)
B0=I,
(19)
其中,
sk=Xk+1-Xk,
(20)
yk=f′(Xk+1)-f′(Xk)。
(21)
2.2.2 目標函數設計
對于未知節點坐標,需要滿足定位誤差最小,因此目標函數設計為
F(x,y,z)=minE(x,y,z)
(22)

,
(23)
式中,E(x,y,z)為定位誤差。
將式(23)展開,整理得
n(x2+y2+z2),
(24)


E(x,y,z)=d-2ax-2by-2cz+
n(x2+y2+z2)。
(25)
多變量的非線性方程組轉化成非約束優化問題,即E函數的最小值問題。該函數作為擬牛頓優化的目標函數,通過迭代求解,得到未知節點的近似最優解。
3 算法設計
3.1 算法主要執行過程
本文定位方法把節點定位過程分為兩個階段,即離線階段和在線階段。定位流程圖如圖1所示。
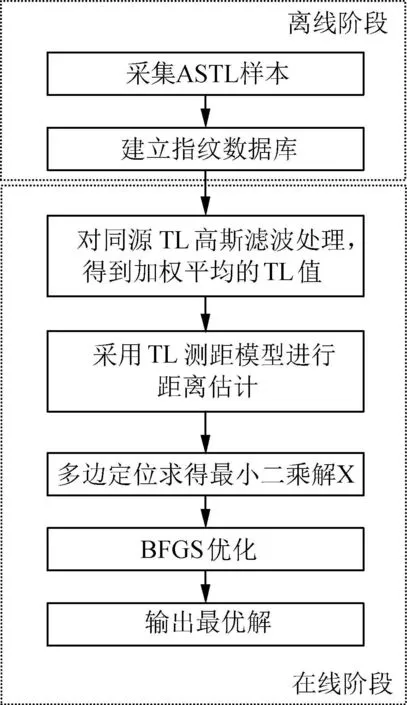
圖1 定位流程圖
未知節點定位步驟如下:
(1)離線階段節點通過與鄰居錨節點通信,記錄鄰居節點發送信號給該節點后的TL值,并存入指紋庫。


(4)采用多邊定位方法,得到最小二乘解X。
(5)將步驟(4)得到的X作為初始值,采用BFGS算法迭代求解近似解。
(6)輸出近似解(x,y,z)。
3.2 BFGS算法優化
對BFGS優化子流程細化,流程圖如圖2所示。流程步驟如下。
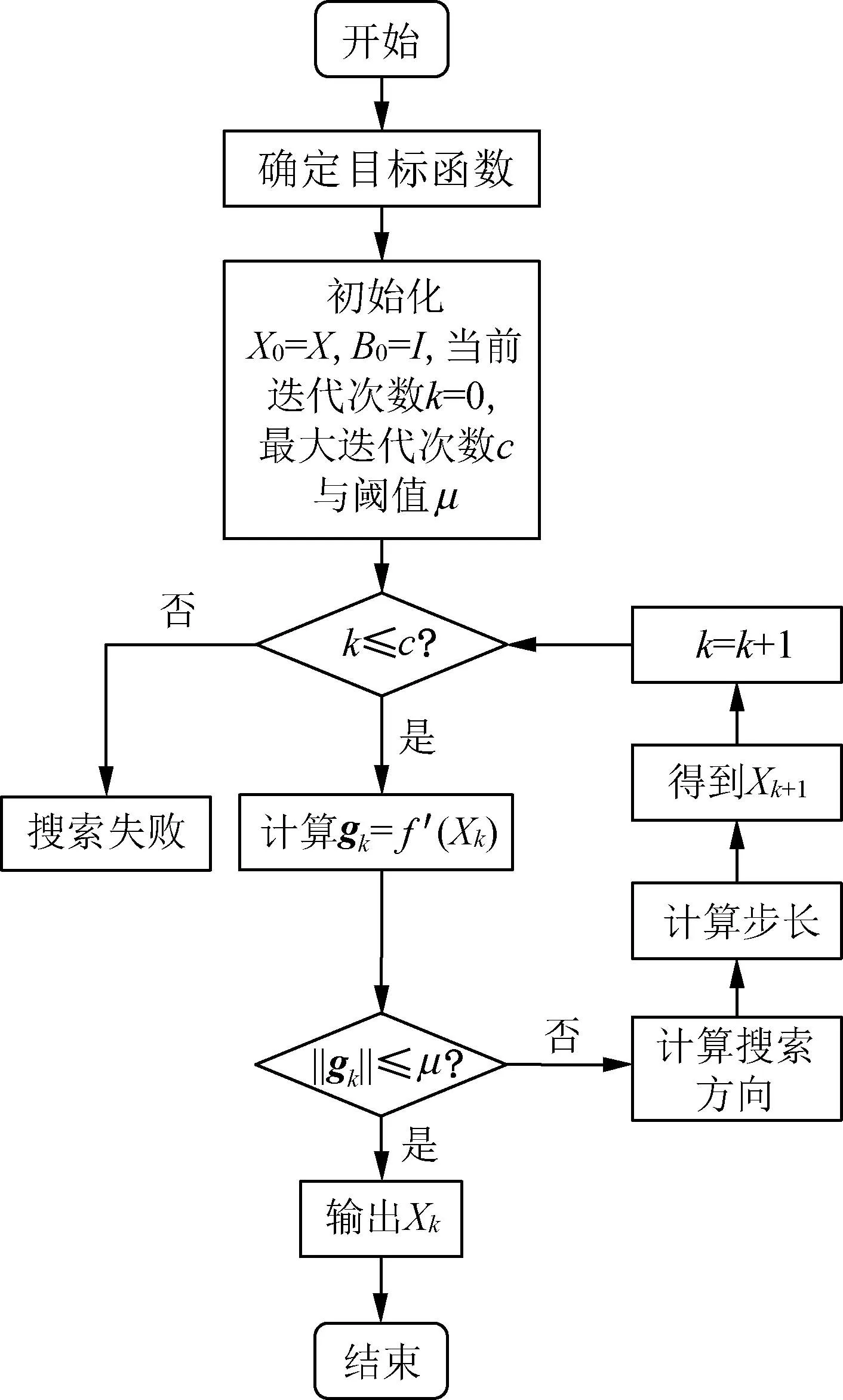
圖2 BFGS算法流程圖
(1)初始化參數:設置初值X0=X、誤差閾值e和最大迭代次數c,并令B0=I,k:=0。
(2)若k≥c,跳出循環。
(3)否則計算f′(Xk),若|f′(Xk)|≤ε,輸出最優解。
(4)否則,計算搜索方向:dk=-Bkgk。
(5)得到步長γk,令sk=γkdk,xk+1:=xk+sk。
(6)計算gk+1=?f(xk+1),若‖gk+1‖≤ε,輸出xk+1。
(7)否則,計算yk=gk+1-gk。
(8)根據公式(17),進行迭代計算。
(9)令k=k+1,轉至步驟(2)。
4 仿真實驗
采用MATLAB2018仿真工具,仿真內容由測距優化分析和定位優化分析兩部分組成。為了模擬環境噪聲,在仿真環境中添加了高斯白噪聲。
4.1 測距優化分析
為了對測距優化,使用仿真工具生成10 m×10 m×10 m三維水下環境。在區域內部隨機部署10個錨節點和1個未知節點。節點通信半徑設為5 m。未知節點可直接與所有錨節點通信。對PF、RF、KF、傳統測距算法和本文提出的GF測距算法進行5組實驗后,求取每組測距誤差平均值,測距誤差結果對比如表1所示。
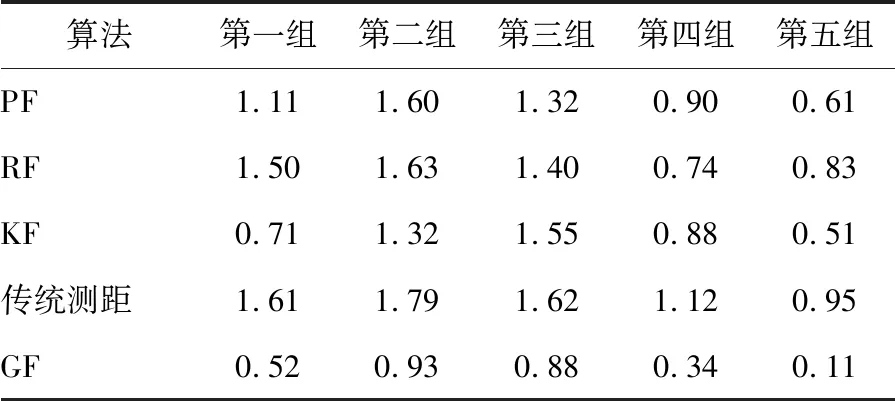
表1 測距誤差結果對比表
由表1可以看出,本文提出的GF算法平均誤差與PF、RF、KF、傳統測距算法相比,測距優化效果最佳,最小誤差可達0.11 m。
4.2 定位優化分析
針對定位優化,使用仿真工具生成100 m×100 m×100 m水下三維網絡節點分布結構,如圖3所示。其中,黑點為未知節點,黑色“*”為錨節點。在該區域內隨機部署100個節點,其中錨節點占40%,以保證錨節點能覆蓋整個網絡范圍。具體參數及參數值如表2所示。

圖3 節點分布圖
對于每個節點,其誤差定義為式(26)。其中(xie,yie,zie)為第i個被定位的估計坐標,(xit,yit,zit)為第i個被定位節點的實際坐標。
(26)
(27)
通過實驗對比ASTL-RQ-PSO、ASTL-SAPSO、 ASTL-GWO和ASTL-BFGS算法,證明本文提出的算法定位誤差優于其他算法。4種算法的定位誤差結果如圖4所示,其中橫坐標為節點序號,縱坐標為定位誤差。
由圖4可以看出,ASTL-BFGS算法的定位誤差最小,與ASTL-GWO、ASTL-SAPSO和ASTL-RQ-PSO定位算法相比,定位精度分別提高了約49%、31%和9%。圖5~8為4種算法各自的定位結果,其中黑點為未知節點的估計位置,黑色短線為節點真實位置和估計位置間的偏差,黑色圓圈為不能定位的節點。圖5為本文提出ASTL-BFGS算法的定位結果,節點的定位誤差很小。
圖5 ASTL-BFGS定位結果
圖6~8為除本文外其他3種算法定位結果,多數節點的定位誤差較大。
圖6 ASTL-RQ-PSO定位結果
圖7 ASTL-SAPSO定位結果
圖9為本文提出的基于BFGS優化算法與RQ-PSO、SAPSO以及GWO 3種優化算法性能對比。由圖9可以看出,隨著迭代次數增加,定位誤差逐漸降低,同其他算法相比,BFGS算法僅需迭代4次,定位誤差便收斂至接近0。ASTL-RQ-PSO需要14次達到收斂,ASTL-SAPSO需要16次達到收斂,ASTL-GWO需要25次達到收斂,并且,ASTL-RQ-PSO、ASTL-SAPSO和ASTL-GWO 3種算法收斂后的定位誤差均大于ASTL-BFGS算法收斂后的定位誤差。
圖8 ASTL-GWO定位結果
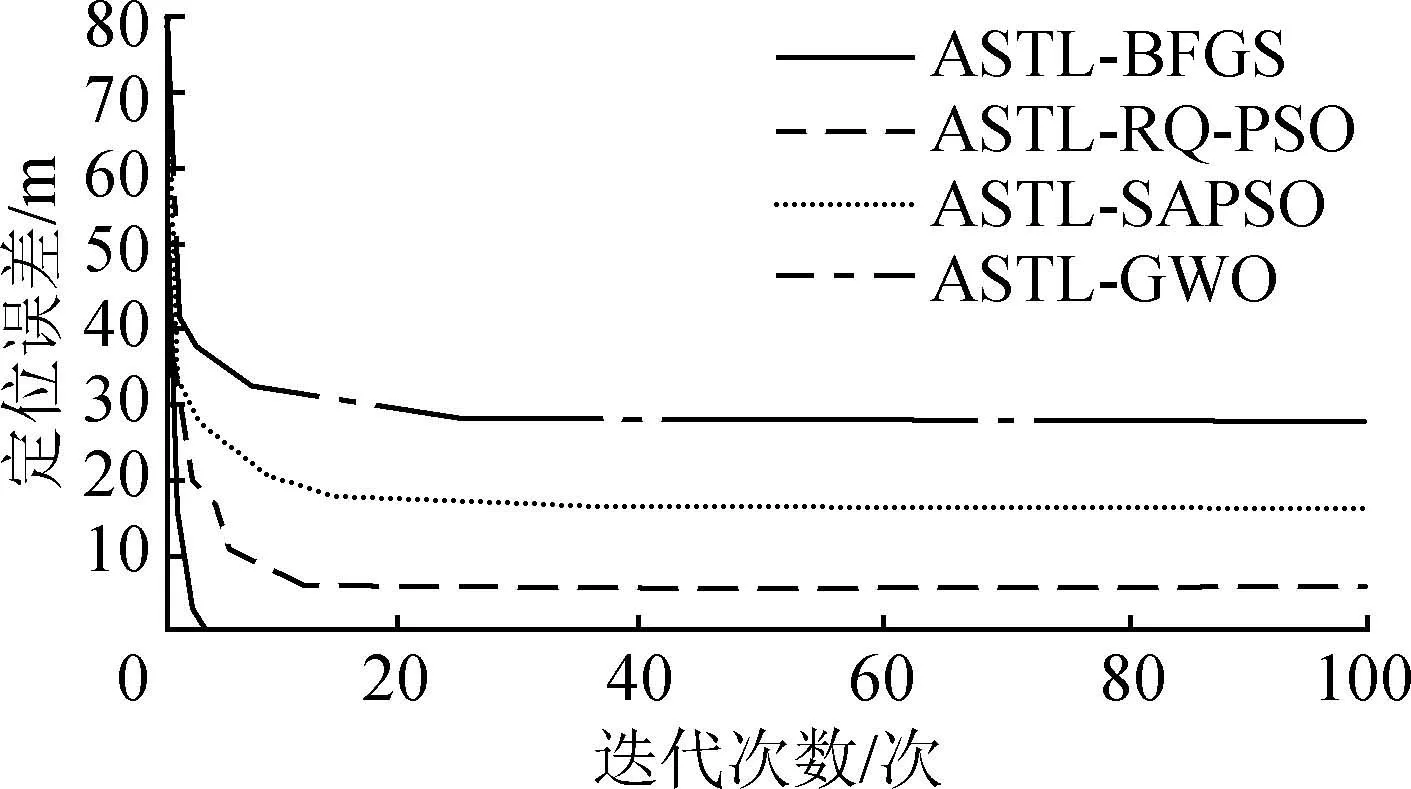
圖9 BFGS、RQ-PSO、SAPSO以及GWO算法性能對比
進行兩組獨立實驗,每組實驗進行30次,并對每次實驗定位結果的平均總誤差取均值,以證明算法的普適性。通過分別改變錨節點數量和通信半徑,以探究二者分別對未知節點定位平均總誤差(以下簡稱平均總誤差)的影響。
4.2.1 錨節點數量與定位誤差實驗
錨節點數量與平均總誤差間的關系如圖10所示。本實驗中,設置節點通信半徑為50 m,其余參數如表1所示。
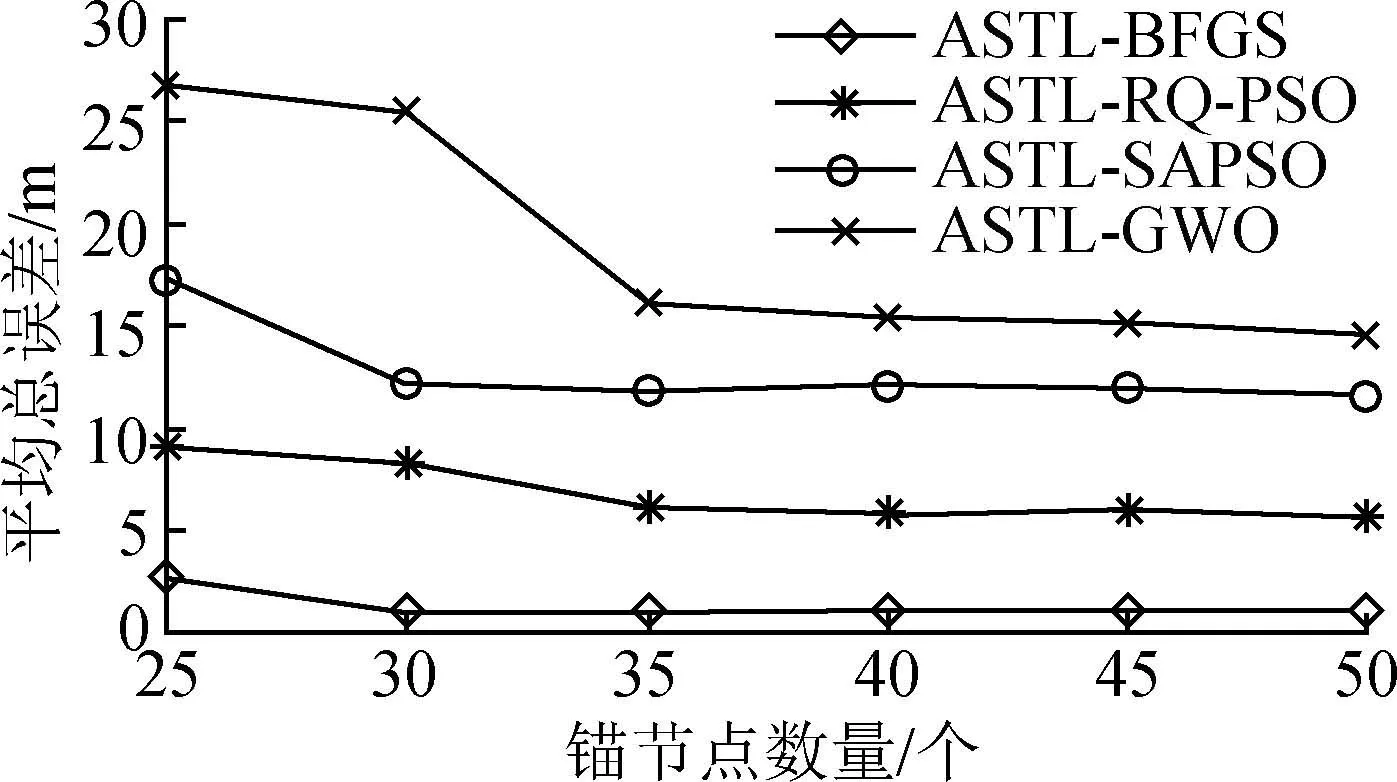
圖10 平均總誤差與錨節點數量關系
由圖10可以看出,隨著錨節點數量增加,4種算法的平均總誤差逐漸減小,錨節點數量為30個時,ASTL-BPFS和ASTL-SAPSO算法的平均總誤差趨向于穩定,而ASTL-RQ-PSO算法和ASTL-GWO算法在錨節點數量為35時,平均總誤差才趨于穩定,且在不同錨節點數量的情況下,ASTL-BPFS的平均總誤差均小于其余算法,具體數據如表3所示,對每種算法各組的平均總誤差求平均值,ASTL-BFGS、ASTL-RQ-PSO、ASTL-SAPSO和ASTL-GWO 4種算法對應結果分別為1.42,6.95,12.93,18.97 m。可以看出,相比ASTL-RQ-PSO、ASTL-SAPSO和ASTL-GWO 3種算法,ASTL-BFGS的整體定位精度分別提高5.53,11.51,17.55 m。

表3 不同數量錨節點時的平均總誤差
4.2.2 通信半徑與定位誤差實驗
平均總誤差和通信半徑的關系如圖11所示。本實驗中,設置錨節點數量為40,其余參數如表1所示。
由圖11可以看出,ASTL-BFGS的平均總誤差優于其他方法,并且隨著通信半徑增大,未知節點感知到的錨節點數量增多,定位誤差相應減小,直到通信半徑從50開始,平均總誤差逐漸趨于平穩。

圖11 平均總誤差與通信半徑關系
5 結 語
針對水下三維水聲無線傳感網絡節點定位誤差大的問題,提出一種基于高斯濾波和擬牛頓優化的水下定位優化算法;針對突發性環境噪聲對測距結果的影響,提出對TL離線采樣樣本進行高斯濾波的方法,對所有的樣本取加權平均,得到的值代入ASTL測距模型,達到了測距優化的目標,并采用BFGS算法對多邊定位求得未知節點坐標的初始解進行優化,以降低定位誤差。經仿真實驗驗證,本文提出的算法有效地降低了測距誤差,提高了定位精度。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
