狹縫均質器型成像光譜儀光學設計
2021-06-13 17:31:06劉紫瑩朱嘉誠唐紹凡李歡張明杰
航天返回與遙感 2021年2期
劉紫瑩 朱嘉誠 唐紹凡 李歡 張明杰
(1 北京空間機電研究所,北京 100094)
(2 蘇州大學光電科學與工程學院,蘇州 215006)
0 引言
對地觀測衛星受地面反照率變化和大氣層變化的影響,導致地面觀測場景不均勻。在沿軌方向的觀測場景不均勻將造成星載成像光譜儀中的物理狹縫被非均勻照明,對于大氣探測等領域光譜維過采樣的成像光譜儀,將導致光譜響應函數失真[1]。目前,可采用軟件校正或硬件抑制解決光譜儀狹縫照明不均勻導致的光譜失真現象。美國宇航局發射Aura衛星中的OMI載荷、歐空局研制Sentinel-4衛星中的UVN載荷等,均采用軟件算法對光譜失真進行校正補償,通過時間過采樣的數據來承載狹縫照明不均勻的信息,進行算法校正[2-4]。但是軟件算法只能校正可見光波段下的光譜失真問題,無法應用于短波紅外譜段。因此,歐空局在Sentinel-5衛星搭載的UVNS光譜儀系統上,采用添加反射式狹縫均質器的硬件抑制方法,減少觀測場景在沿軌方向的不均勻性導致的光譜響應函數扭曲,從而降低大氣成份計算誤差。此外,德國在提出的CarbonSat衛星計劃中,也通過添加反射式狹縫均質器設計,實現勻光探測[5-8]。
目前,中國關于觀測場景不均勻導致光譜失真的研究尚處于起步階段,作為硬件抑制的方法——狹縫均質器型成像光譜儀光學設計,具有研究的必要性。本文首先分析明暗分布不均勻的觀測場景對星載成像光譜儀的影響,然后介紹狹縫均質器的構成和工作原理,最后給出系統的優化設計和結果,并進行了像質評價、仿真驗證和分析說明。
1 狹縫均質器
1.1 場景不均勻性分析
場景不均勻性是由云、氣溶膠層、地面高度等造成的大氣層變化和地面反照率變化引起的。因此,星載成像光譜儀觀測的場景在沿軌方向,即子午方向明暗分布不均勻。圖1為沿軌方向參數化的一維“非均勻場景”。
圖1 中為沿衛星飛行方向,將成像光譜儀觀測到的不均勻場景進行一維參數化,“#1”為觀測場景的明暗分布由全暗場景變為全明場景,“#2”為由全明場景變為全暗場景。
帶有空間相關性信息的權重W(x)在全明和全暗兩種反照率值之間進行線性插值,其中插值權重W(x)僅采用兩個值,即0或1。當測量的光譜坐標為λ時,觀測場景的反照率L(λ,x)為
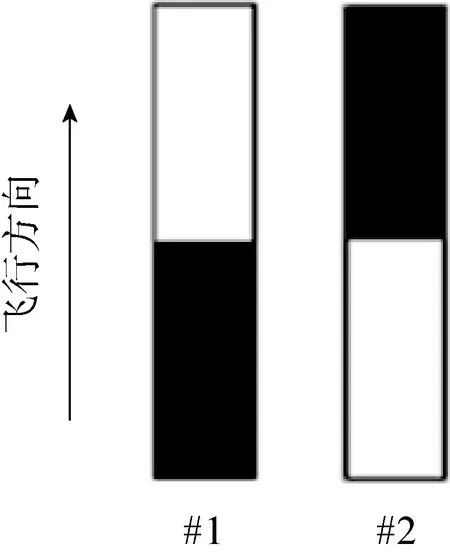
圖1 一維“非均勻場景”Fig.1 One dimensional “inhomogeneous scene”

式中x指衛星沿軌運動方向;L1()λ表示測量光譜坐標為λ時,全暗場景的反照率值;L2()λ表示測量光譜坐標為λ時,全明場景的反照率值。
成像光譜儀傳播參數化的反照率L(λ,x):將沿軌方向不均勻的觀測場景權重W(x)與望遠系統的點擴散函數PSaF(x,y)進行模糊處理得到W~(x),再經過狹縫邊緣的切割和光譜儀點擴散函數的模糊處理,最終獲得成像光譜儀的輻照度I(λ,x)為

式中y指衛星交軌運動方向;S(x)為狹縫函數;PSbF(x,y)為光譜儀的點擴散函數;*表示卷積。
將模糊處理的權重W~(x)替換為在狹縫寬度上的平均值,得到均勻場景下的輻照度V,進而評估因場景不均勻性帶來的輻射誤差。

圖2 為對不同波段處均勻場景下的輻照度V進行歸一化后,獲得的在不均勻場景下,成像光譜儀的歸一化輻射誤差值。由圖2可知,波長在760~770nm之間,成像光譜儀的歸一化輻射誤差波動較為明顯。由于明暗分布不均勻的觀測場景將造成在成像光譜儀入射狹縫處成非均勻照明的像,最終導致產生輻射誤差。通過在傳統成像光譜儀的入射狹縫后面添加一個具有勻光功能的柱透鏡式狹縫均質器,將入射狹縫處照明非均勻的圖像進行勻化,實現輻射誤差的抑制。

圖2 歸一化輻射誤差Fig.2 Relative radiation error
1.2 狹縫均質器構成和原理
柱透鏡式狹縫均質器是由物理狹縫、柱狀透鏡、虛擬狹縫三部分組成[9],結構如圖3所示。

圖3 柱狀透鏡式狹縫均質器結構透視圖Fig.3 Structure diagram of the lens-based slit homogenizer
圖3 中坐標x指衛星沿軌運動方向即子午方向即物理狹縫寬度方向,坐標y指衛星交軌運動方向即弧矢方向即物理狹縫長度方向,在物理狹縫后放置與狹縫平行的柱狀透鏡,f1為柱狀透鏡的前焦距,透過狹縫的光線經柱透狀鏡后形成虛擬狹縫,虛擬狹縫像投影在柱狀透鏡后焦距f2處。即狹縫均質器的前焦平面與物理狹縫平面重合,狹縫均化器的后焦平面與虛擬狹縫面重合。
其工作原理是將望遠物鏡的像與狹縫均質器的瞳進行交換,即望遠物鏡上不同視場且能量分布不均勻的光束通過狹縫均質器中的柱狀透鏡進行折射,形成平行光,即各視場光束的能量分布均勻。不同視場的光束在光譜儀入口處相互重合,最終形成光線均勻分布的光瞳圖像,實現光譜儀入口處圖像照明均勻,如圖4所示。
圖4 中三個不同顏色的線代表三個不同的視場,在望遠物鏡(物理狹縫)處分布三個不同視場的光束,即物理狹縫處形成光照不均勻的物理狹縫圖像,通過柱狀透鏡的作用,將三個不同視場的光束均變成平行光,并在其光瞳處三個視場的光束相重合,即物理狹縫圖像的光線進行重新分布,得到光照均勻的虛擬狹縫圖像。

圖4 狹縫均質器工作原理Fig.4 Working principle of slit homogenizer
采用柱狀透鏡作為勻光元件具有如下優點:
1)該透鏡僅在狹縫寬度方向有曲率,沿狹縫方向沒有曲率。滿足光線僅在狹縫寬度方向發生彎曲,不改變沿狹縫方向光線,以保留交軌方向完整圖像信息;
2)柱狀透鏡的橫截面為圓形,旋轉自由度小,安裝無需控制;
3)柱狀透鏡相對堅固,虛擬狹縫平面可以靠近物理狹縫平面,減小狹縫均質器設備的體積。
2 系統設計方案
2.1 光學相關指標要求
由于光譜響應函數失真現象僅存在于大氣探測等領域光譜維過采樣的寬狹縫成像光譜儀中,因此本系統狹縫的寬度為100μm, 并選用像元尺寸為25μm×25μm的CCD面陣探測器,光譜維4倍過采樣,滿足狹縫像在寬度方向上被完整接收,空間維不進行合并,通過4倍過采樣實現采集保真的光譜信息[10]。
目前,國際上針對可見光波段范圍內的光譜失真問題,均采用后期軟件校正的方法解決,但是,軟件校正不能用于吸收帶太強、由多種化學物質產生的短波紅外譜段。因此,本系統的工作波段范圍為1.0~2.5μm,通過該儀器的研究設計,實現硬件抑制的方法解決在短波紅外譜段出現的光譜失真現象。儀器與光學系統相關的指標要求見表1。
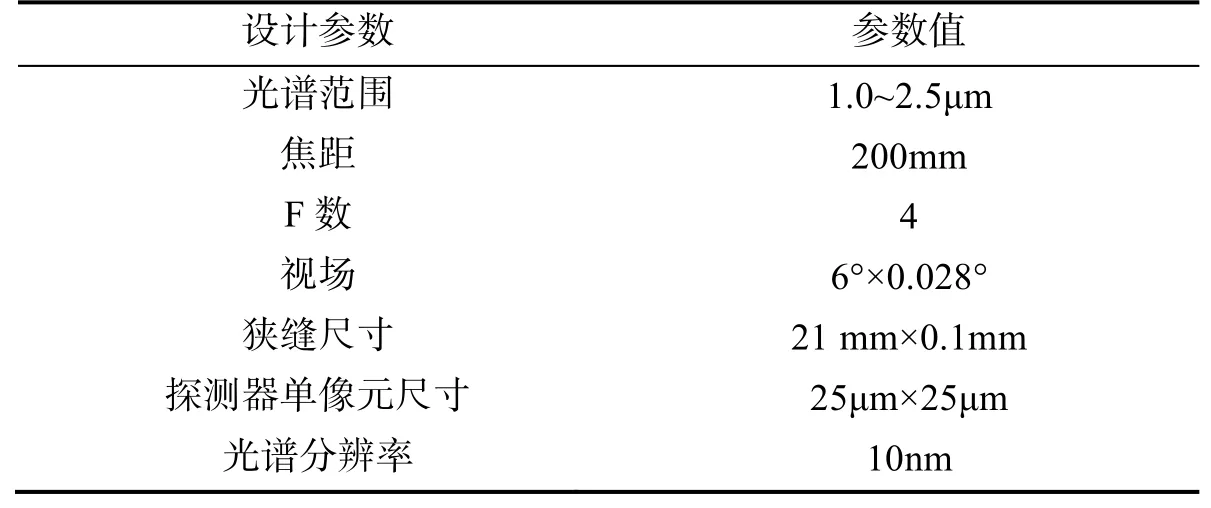
表1 光學相關指標Tab.1 Specifications related with optical system
2.2 設計方案
狹縫均質器用于勻化物理狹縫寬度方向的光線,不改變弧矢方向光線的傳播路徑,在勻化沿軌方向不均勻性的同時,保留交軌方向的空間信息。為此,需要設計特定像散的前置望遠系統,實現觀測對象的子午像點成像到狹縫均質器的前表面,弧矢像點成像到狹縫均質器的后表面,即均質器不作用于弧矢像點。在滿足系統指標要求的初始望遠系統后面添加具有像散特性的光學元件——柱面透鏡[11-12],可以通過改變柱面透鏡的曲率半徑,靈活地設置望遠系統像散大小,易于后期操作和裝配。分光系統采用凸面光柵Offner型分光裝架,具有固有像差小、像質良好等優點[13-14],該光學系統設計方案的結構簡圖如圖5所示。
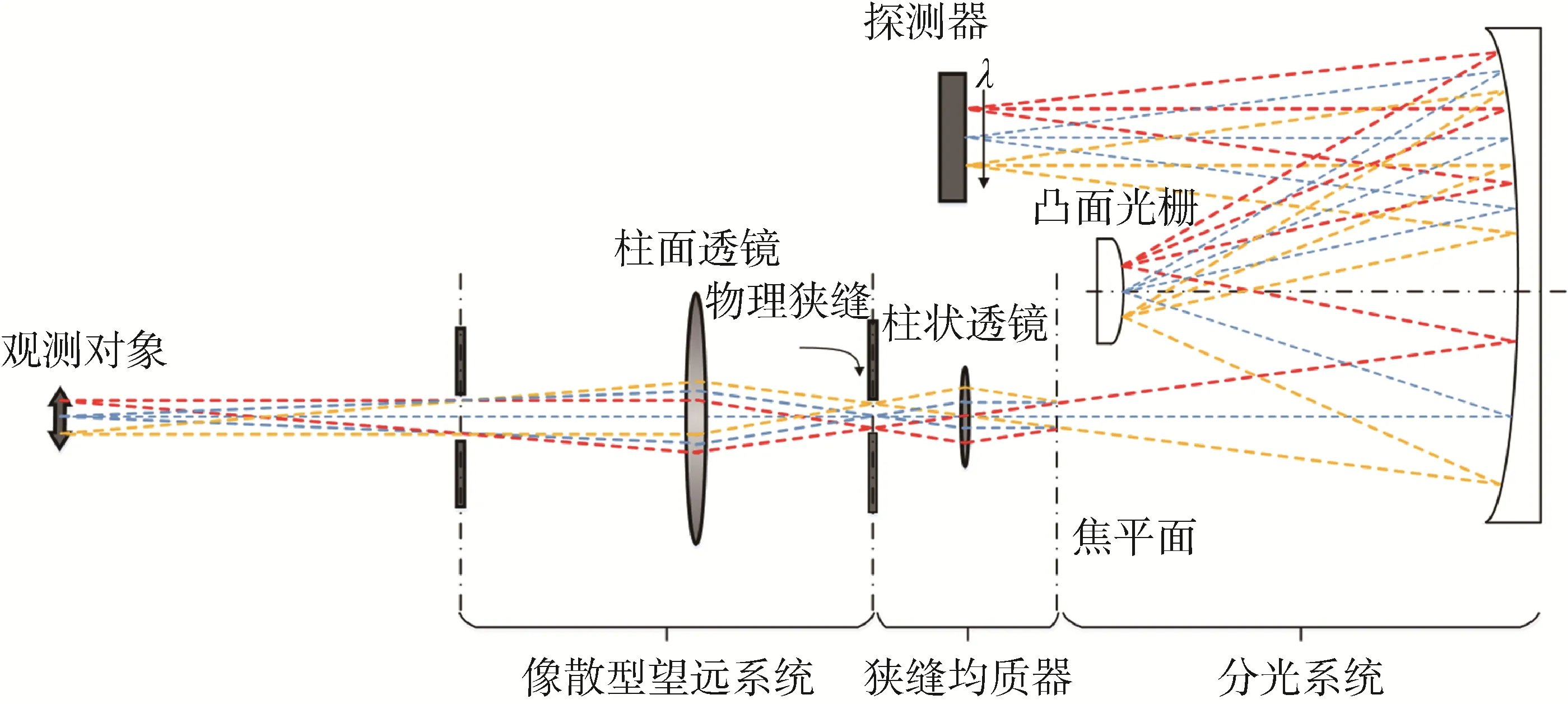
圖5 整體方案結構簡圖Fig.5 Sketch of optical system
狹縫均質器型成像光譜儀包括像散型望遠系統、狹縫均質器和分光系統。 像散型望遠系統將觀測對象的子午像點成像到狹縫均質器前表面,弧矢像點成像到分光系統焦平面,狹縫均質器對子午像點進行勻光處理,在分光系統焦平面上形成虛擬狹縫圖像,經后組Offner分光裝架進行分光接收,最終可在探測器焦平面上得到光譜圖像。
3 系統優化設計與結果
3.1 像散型前置望遠系統
根據光學指標要求,選擇具有無遮攔、寬視場、大孔徑、小尺寸的離軸三反式系統作為初始望遠結構[15-17]。然后在離軸三反系統的三鏡后面添加一個柱面透鏡,將其子午方向的曲率半徑和中心厚度設置為變量進行人機交互式優化,得到像散型前置望遠系統子午和弧矢方向成像品質最優的位置,設為望遠系統的子午像面、弧矢像面,兩個像面之間的距離即為前置望遠系統所提供的像散值。優化后得到像散型望遠系統設計結果如圖6所示,結構參數見表2。

圖6 像散型望遠系統設計結果Fig.6 Design result of astigmatic telescope

表2 優化后像散型望遠系統結構參數Tab.2 Optimized parameters of astigmatic telescope system configuration
望遠系統的像散值為0.596mm,子午方向焦距f3=187mm,弧矢方向焦距f4=200mm,F數為3.86,視場角為6°×0.028°,所成物理狹縫像的寬度為97.6μm,長度為21.1mm,滿足設計指標要求。
圖7 (a)、(b)分別是系統子午像面中子午像點和弧矢像面中弧矢像點的調制傳遞函數曲線(MTF),在奈奎斯特頻率(20線對/mm)處,系統子午像點和弧矢像點的 MTF 值分別大于 0.79和0.81,光學系統具有接近衍射極限的成像品質。
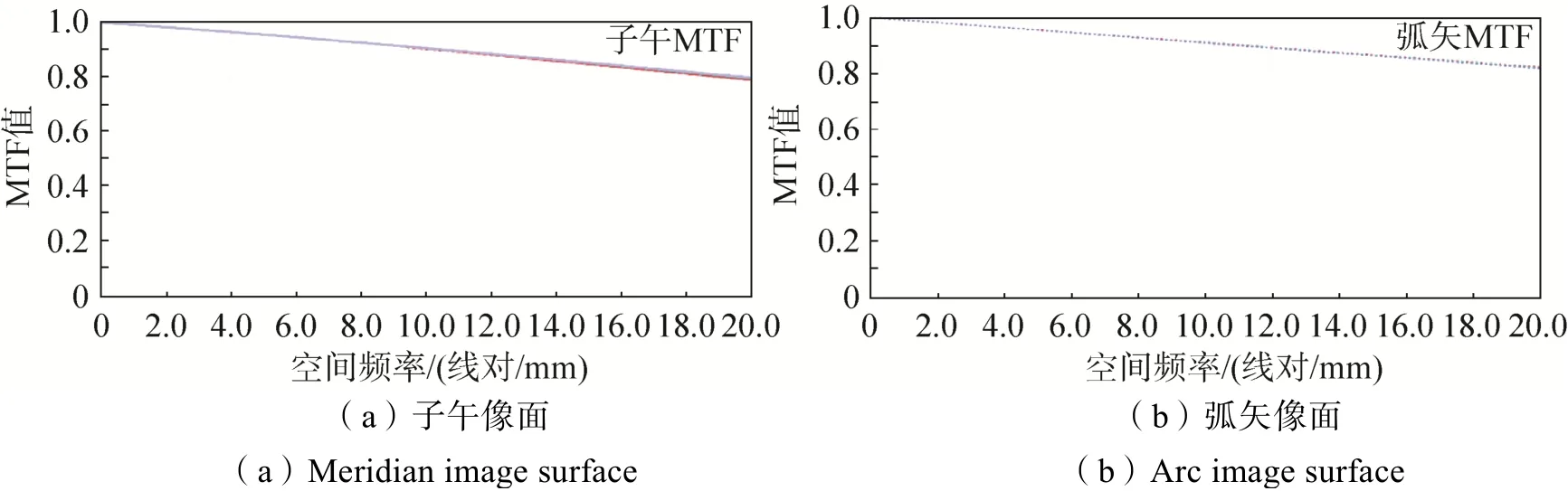
圖7 像散型前置望遠系統MTF曲線Fig.7 MTF curve of astigmatic telescop
3.2 狹縫均質器
柱透鏡式狹縫均質器結構參數的選取需滿足以下光學成像要求:
1)通過柱狀透鏡的勻光作用,使成像在物理狹縫處同視場的發散光線變成平行光,然后在虛擬狹縫處實現不同視場光線的匯聚。
2)在子午方向,由不同視場光線匯聚成的虛擬狹縫像與勻光作用前的物理狹縫像大小相同。
3)在弧矢方向,光線的傳播不受狹縫均質器勻光作用的影響,以保留交軌方向的空間信息,要求弧矢像點的成像品質優良。
根據其光學成像要求,借助Zemax軟件,在滿足前置望遠系統所提供的像散值的前提下,確定理想柱狀透鏡子午方向的光焦度值xφ,再通過焦距公式和普通柱狀透鏡的焦距和曲率半徑關系公式,計算得出柱狀透鏡子午方向曲率半徑、弧矢方向曲率半徑、前焦距f1和后焦距f2的初始結構參數,將其輸入軟件中,通過改變柱狀透鏡子午方向曲率半徑、中心厚度、前焦距f1和后焦距f2的值,綜合考慮設備中柱狀透鏡的結構尺寸和加工難易程度以及光線的分布情況等因素,反復調整,獲得滿足成像品質要求的最優解。依上述描述可確定狹縫均質器初始結構參數,如表3所示。

表3 柱狀透鏡式狹縫均質器結構參數Tab.3 Structure parameters of lens-based slit homogenizer 單位:μm
通過調制傳遞函數MTF曲線評價柱透鏡式狹縫均質器的成像品質,如圖8(a)、(b)所示。

圖8 狹縫均質器MTF曲線Fig.8 MTF curve of slit homogenizer

圖9 入射光源在沿狹縫寬度方向的非均勻照明Fig.9 Non-uniform illumination of the incident light source along the width of the slit
用物理狹縫面的子午像點MTF曲線評價均質器子午方向的像質,虛擬狹縫面的弧矢像點MTF曲線評價均質器弧矢方向的像質。整個視場和波段的子午像點和弧矢像點MTF分別達到0.79和0.68以上,柱透鏡式狹縫均質器成像品質良好。
利用LightTools建立仿真模型進行5×108條光線追跡,通過對狹縫均質器型成像光譜儀中虛擬狹縫出瞳面的出光特性與傳統成像光譜儀中物理狹縫面的出光特性進行分析對比,評價柱透鏡式狹縫均質器的勻光性能。
成像光譜儀中物理狹縫被非均勻照明的原因是衛星觀測場景在沿狹縫寬度方向上的不均勻造成的。因此,通過仿真入射光源在沿狹縫寬度方向的非均勻性,實現星載成像光譜儀觀測場景不均勻性的模擬,如圖9所示。
圖9 是將一束均勻分布的平行光在沿狹縫寬度方向上進行遮擋,使入射光線在子午方向明暗分布不均勻。將仿真后的光線分別入射到傳統成像光譜儀和狹縫均質器型成像光譜儀中,獲得如圖10(a)傳統成像光譜儀物理狹縫面的輻照度分布和圖10(b)狹縫均質器型成像光譜儀虛擬狹縫面的輻照度分布。
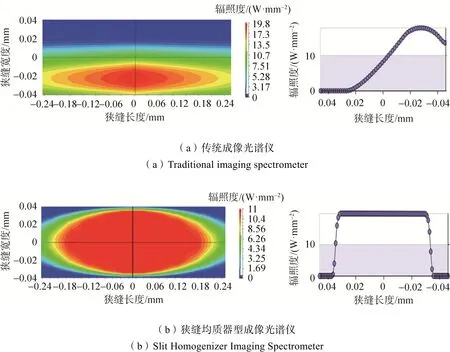
圖10 觀測非均勻目標的輻照度Fig.10 Irradiance of non-uniform target
圖10 左邊是整個狹縫范圍內的照度圖,右邊是狹縫寬度方向的照度分布曲線。將在狹縫寬度方向上兩種光譜儀的照度分布值代入不均勻度公式

式中σ為不均勻度;Imax,Imin分別為最大輻照度和最小輻照度值,通過計算得出傳統成像光譜儀中物理狹縫面不均勻度為100%,柱透鏡式狹縫均質器的虛擬狹縫面不均勻度為14.29%,與傳統成像光譜儀中物理狹縫面的均勻度相比較,狹縫均質器具有顯著勻光功能。
3.3 Offner分光裝架
分光裝架的設計指標如表4所示,狹縫長度和數值孔徑均與前置系統相匹配,可對由狹縫均質器所生成的虛擬狹縫進行光譜分光。
由于系統的探測光譜范圍為1~2.5μm,光譜采樣間隔為10nm,探測器像元尺寸為100 μm,可計算得到系統譜面寬度為15mm。為了確保光柵的曲率半徑值在合適的范圍內,令其槽密度取50線對/mm作為初始值,在一級衍射條件下,根據系統的同心對稱性和光柵方程可分別計算求得Offner的初始結構光柵、反射鏡1和反射鏡2的曲率半徑值。將計算得到的初始結構參數輸入優化軟件,控制其成像品質以及遮攔等性能[18-20],經過優化得到最終設計結果如圖11所示,結構參數如表5。圖12 展示了在中心波段處的MTF曲線,優化得到的Offner分光裝架具有接近衍射極限的成像品質。

表4 分光系統參數Tab.4 Parameters of dispersive light system

圖11 Offner分光裝架設計結果Fig.11 Design result of offner spectrometer

表5 結構參數Tab. 5 Optimized parameters

圖12 Offner分光裝架MTF曲線Fig.12 MTF curve of offner spectroscopic configuration
3.4 全光學系統設計結果
將像散型前置望遠系統、柱透鏡式狹縫均質器和Offner型分光裝架拼接,即得到狹縫均質器型成像光譜儀全光學系統,全系統光路如圖13所示,系統總長為609mm,結構緊湊。
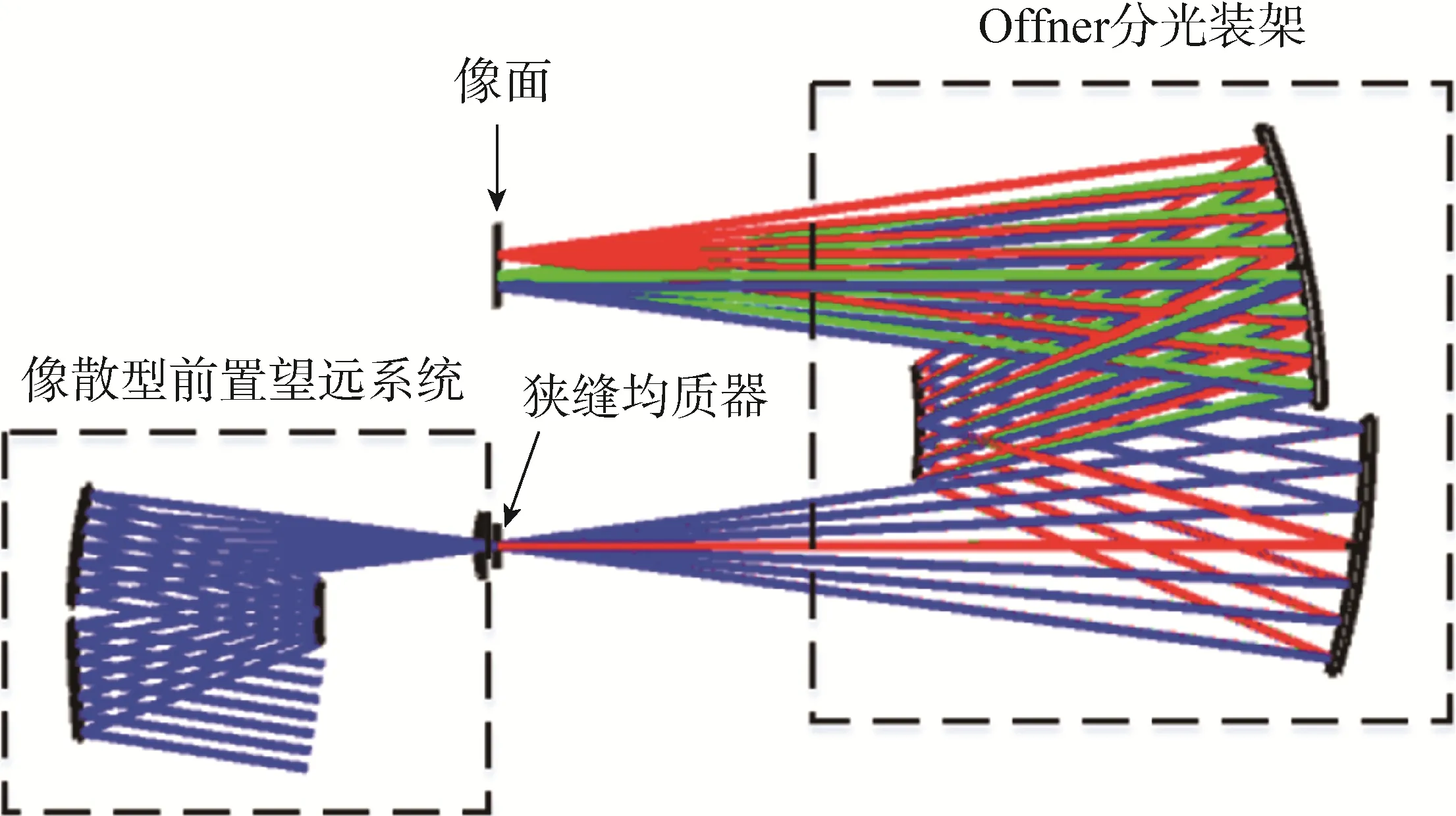
圖13 全光學系統Fig.13 The whole optical system
利用MTF曲線評價狹縫均質器型成像光譜儀弧矢方向成像品質,系統在中心波長處的MTF曲線如圖14所示,在奈奎斯特頻率處,系統在弧矢方向的MTF值均優于0.74,系統在弧矢方向成像品質優良。
利用光譜響應函數SRF (Spectral Response Function),直觀表現狹縫均質器型成像光譜儀可以有效抑制子午方向的光譜失真,表達式為


圖14 系統弧矢方向調制傳遞函數曲線Fig.14 MTF curve of optical system in sagittal direction
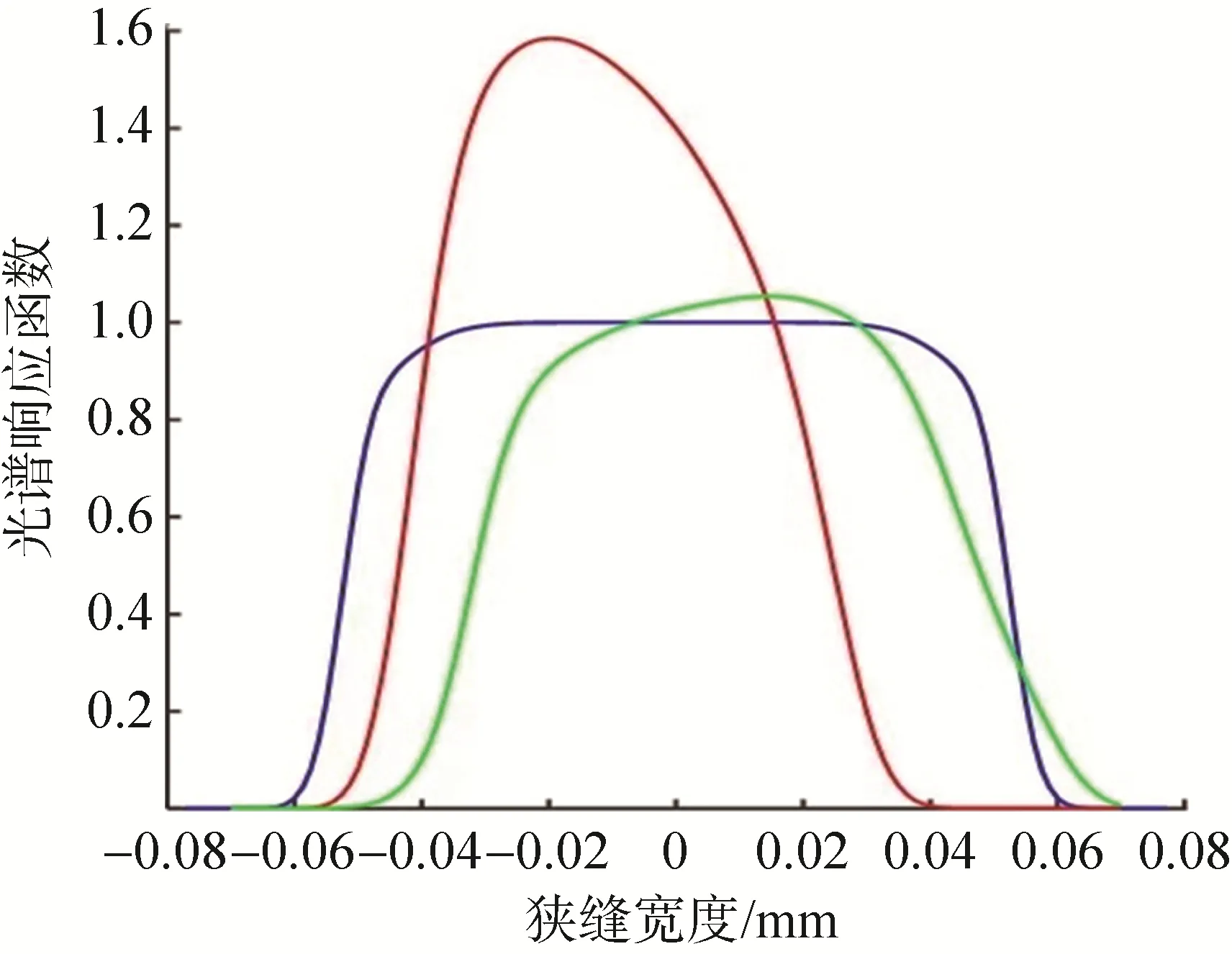
圖15 光譜響應函數曲線Fig. 15 SRF curve
將仿真觀測場景不均勻得到的傳統成像光譜儀和狹縫均質器型成像光譜儀的輻照度分布值分別代入入射狹縫函數中,以表征真實的狹縫照明輪廓。本文計算了在中心波段為1.75μm處,三種不同情況下的光譜響應函數曲線圖如圖15所示。
圖15 中,藍色線代表理想情況下,成像光譜儀的光譜響應函數,綠色線、紅色線分別代表觀測場景不均勻情況下,狹縫均質器型成像光譜儀和傳統成像光譜儀的光譜響應函數,將各曲線數據帶入式(7)中,對傳統成像光譜儀和狹縫均質器型成像光譜儀的光譜響應函數失真值ΔSRF進行量化

4 結束語
本文設計了一種工作于短波紅外波段的狹縫均質器型成像光譜儀光學系統,包括像散型前置望遠系統、狹縫均質器和Offner分光系統。前置望遠系統通過添加柱狀透鏡實現特定的像散功能;后置分光系統采用Offner結構,實現了像差小、像質良好。利用柱透鏡式狹縫均質器的勻光功能,抑制衛星在沿軌方向觀測場景不均勻造成的光譜失真,提高光譜數據保真度,實現星載成像光譜儀在地物識別、環境監測等應用領域高保真的目標,為實現升級光譜遙感技術高精準性的需求,提供參考案例和技術積累。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34