靶彈任務規劃與虛擬訓練技術研究
2021-06-11 03:12:46曹立飛曹紅松劉鵬飛張芝源李金新
測試技術學報 2021年3期
關鍵詞:規劃
曹立飛,曹紅松,劉鵬飛,張芝源,李金新,李 超
(1. 中北大學 機電工程學院,山西 太原 030051; 2. 陸軍炮兵防空兵學院鄭州校區,河南 鄭州 450052;3. 中國人民解放軍第3606工廠,山西 侯馬 043000)
隨著軍事智能化的作戰樣式、 戰爭形態的加速演變,武器裝備的升級換代以及保障技術的創新發展,對傳統地面防空作戰也提出了更高的要求,并進一步推動了地面防空作戰力量機械化、 信息化、 智能化融合發展,新型防空武器裝備的訓練和試驗面臨諸多挑戰.
當前,靶彈作為特定的戰場目標特性模擬器,是考核武器裝備戰技指標、 驗證作戰效能、 提高訓練水平的重要手段[1,2],戰斗力生成能力也直接取決于靶彈技術的發展水平[3,4]. 由于使用靶機等設備作為靶彈進行地空導彈射擊操作訓練成本居高不下[5],且飛行速度較低致使訓練效果差. 基于此,制式火箭彈改造為靶彈是主要發展方向之一. 目前,用于配合地空導彈訓練的靶彈主要有: 頭部噴射曳光火箭靶彈[6]、 中高空超音速有控火箭靶彈[7]、 TDI-CCD光靶彈[8]等.
由于任務規劃需求逐漸增多,同時,隨著虛擬現實技術和計算機技術的逐步發展[9],圍繞智能化作戰環境下的地面防空作戰需求,解決實際作戰中的薄弱和重點環節成為亟待解決的重要難題. 因此,有必要對傳統的訓練體系進行補充和完善[10]. 而目前虛擬試驗所代表的驗證手段日益成熟,其理念和方法也得到初步認可.
本文依照“精確任務支持、 仿真系統驗證”的設計思路,開發了一套高速靶彈任務規劃系統,并構建了基于VR-Forces的虛擬仿真模塊,以訓練試驗數據為驅動,提供可視化分析與決策,為地面防空日常訓練提供輔助決策支持,更好地滿足了防空作戰訓練需求.
1 系統總體方案
1.1 系統方案設計
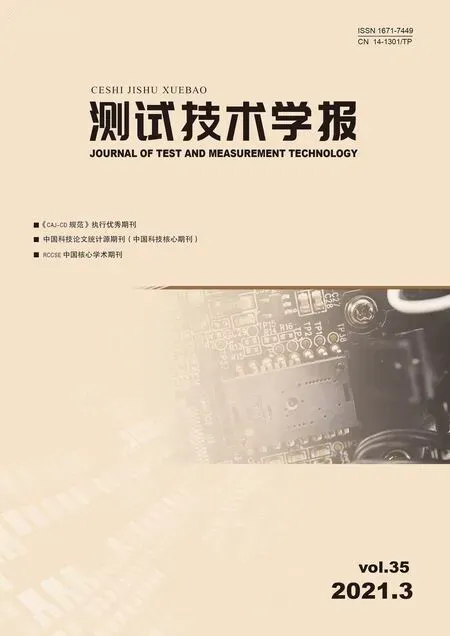
靶彈任務規劃與虛擬仿真系統由4個子系統組成,分別為靶彈彈道及射表計算子系統、 靶彈及導彈任務規劃子系統、 數據傳輸與處理子系統和VR-Forces虛擬仿真子系統. 系統功能模塊及功能設計如圖1 所示.
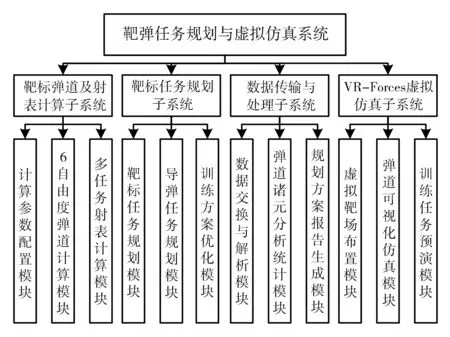
圖1 系統整體框架Fig.1 Function design of task planning system
靶彈彈道及射表計算子系統包括計算參數配置模塊、 6自由度彈道計算模塊和多任務射表計算模塊,能夠進行靶彈彈道和多任務射表計算.
靶彈任務規劃子系統包括靶彈任務規劃模塊、 導彈任務規劃模塊和訓練方案優化模塊,能夠基于地形數據對靶彈和導彈發射任務進行方案布置并在地圖進行展示.
數據傳輸與處理子系統包括數據交換與解析模塊、 彈道諸元分析統計模塊和規劃方案報告生成模塊,可通過提供的軟硬件接口對氣象數據和定位定向數據進行解析和管理,同時對彈道計算和方案規劃結果進行統計分析和導出.
VR-Forces虛擬仿真子系統基于VR-Forces提供的虛擬視景仿真引擎進行虛擬靶場布置、 彈道可視化仿真和訓練任務預演等.
1.2 系統實現流程
系統開發采用自頂向下的設計方法,提出如圖2 所示的系統開發方案. 首先,針對靶彈任務規劃及仿真需求,明確高速靶彈訓練內容; 其次,劃分軟件模塊并確定軟件數據接口及協議,采取分模塊開發、 按需集成的模式進行軟件開發[11]; 最后,進行系統軟硬件聯調、 軟件功能測試及修改.
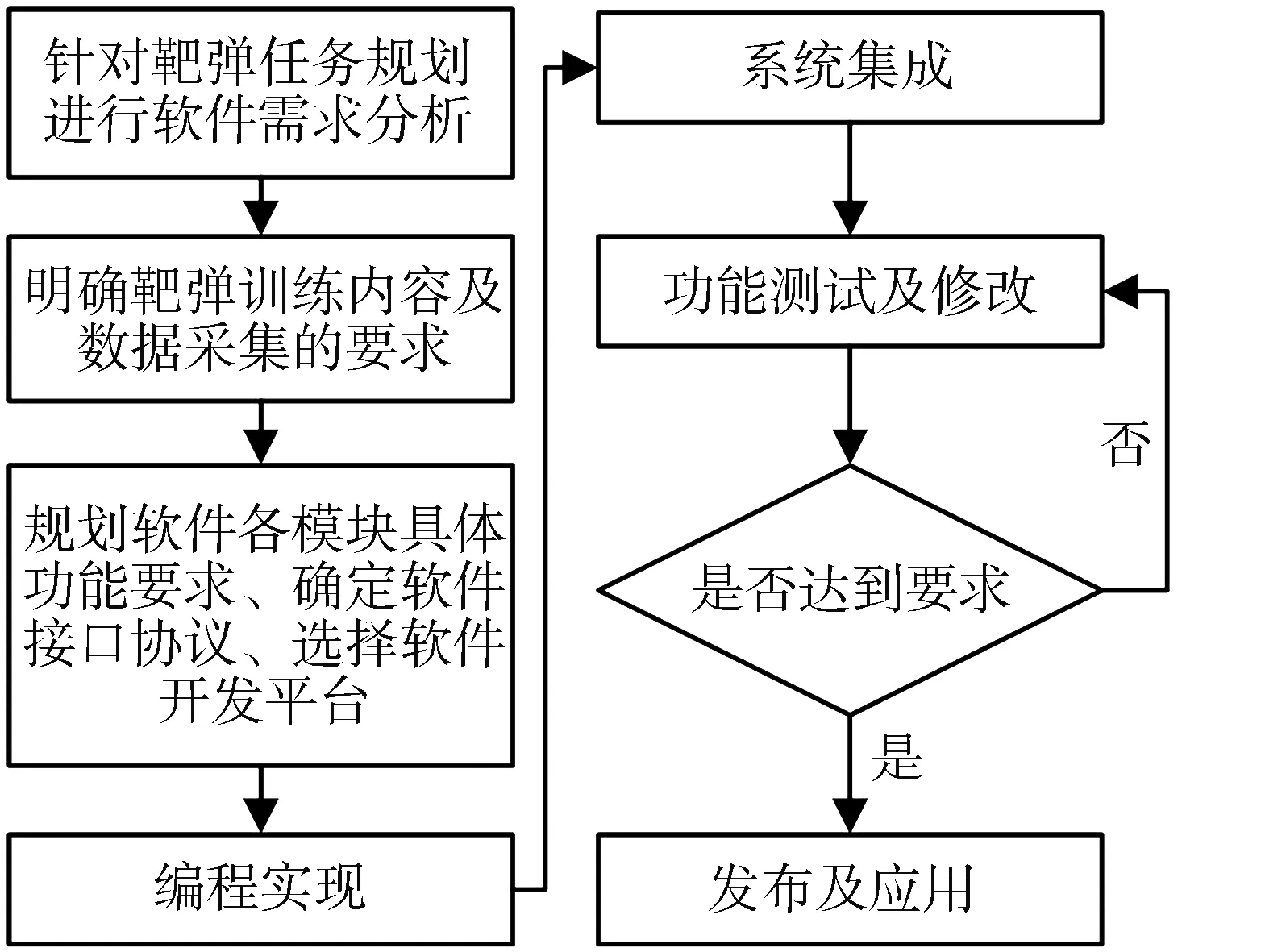
圖2 軟件開發流程Fig.2 software development process
根據系統主要功能模塊,首先,基于Android進行任務規劃3個模塊的實現,主要通過Android Studio進行界面設計并采用JNI實現安卓平臺的彈道計算; 其次,基于OSMDroid實現基于視景地圖的任務規劃模塊; 最后,基于VR-Forces提供的C++ 二次開發接口,實現靶彈虛擬仿真訓練.
2 關鍵技術及實現
2.1 基于Android的彈道及射表計算
在靶彈任務規劃系統中,彈道及射表計算是任務規劃的核心,改造后的靶彈由于氣動特性及結構改變,不能繼續使用原有制式火箭彈的成熟射表,需根據供靶要求實地計算發射位置、 方角位和射角等參數,也需要對高速靶彈彈道及射表進行重新計算和規劃. 為了方便任務規劃使用,本文基于手持式便攜Android設備進行彈道計算的設計與實現.
1) 射表快速計算原理
由于射表計算過程中傳統迭代法通過射程求解射角速度較慢,為了快速計算靶彈射表,進而求解該射程下對應的彈道諸元和供靶參數,本文采用快速彈道求解方法,同時,通過JNI接口實現彈道和射表的高效計算.
射表快速計算流程如圖3 所示,首先,選取輸入射程范圍中的上下界射程進行相應射角的求解; 然后,通過特征點,求解出對應的射角; 最后,通過最小二乘法擬合出射角與射程對應的曲線方程,通過該曲線方程求解出給定射程范圍中其他射程對應的射角.
圖3 射表快速計算流程
2) 計算模塊開發與實現
由于彈道和射表實時計算運算量大、 占用系統資源多,為解決Android平臺上Java語言運算速度慢、 效率低的問題,采用Java和C++語言混合編程,通過調用Java Native Interface (JNI)接口實現Java代碼和其他語言(C++)的代碼交互[12],獲取卓越的計算性能. 在Android Studio平臺中JNI接口調用通過其提供的Native Development Kit (NDK)原生開發工具包來實現,使用該工具進行開發可有效提高彈道和射表實時計算的速度和效率.
靶彈彈道及射表計算由計算參數配置模塊、 6自由度彈道計算模塊和多任務射表計算模塊3部分組成. 首先將6自由度彈道解算的C++模塊和Java結合,通過JNI接口將彈道結果傳遞到Java應用層; 再將提取的靶彈供靶指標通過SmartTable模塊創建的表格進行顯示即可完成射表快速計算; 最后采用TChart提供的繪圖控件進行彈道曲線繪制. 該模塊實現如圖4 所示.

圖4 彈道及射表快速計算程序Fig.4 Ballistics and firing table fast calculation
2.2 基于OSMDroid的任務規劃
任務規劃模塊主要功能為基于地理信息進行靶彈和導彈的發射陣地方案布置,主要分為以下4個步驟:
1) 靶彈任務指標確定: 根據訓練任務中的導彈類型、 靶彈模擬的目標類型來確定靶彈的供靶指標(靶彈飛行速度、 飛行高度、 可供靶時間、 彈道傾角等); 然后依據指標進行靶彈彈道及射表計算以確定最優發射參數.
2) 發射陣地確定: 通過定位信息自動切換地圖到實際訓練場地區域后選擇合適的靶彈和導彈發射位置以及靶彈落區,根據地圖信息確保訓練區域達到發射和訓練要求;
3) 任務規劃: 通過已確定的供靶指標和發射位置等參數進行任務方案規劃,求解導彈航路捷徑、 靶彈射角、 射向等參數,并在地圖上展示航路捷徑、 落區范圍、 靶彈飛行區域等.
任務規劃實現及參數設置界面如圖5 所示. 該模塊使用OSMDroid進行開發[13],OSMDroid包含一個模塊化的地圖操作API,支持在線和離線地圖、 覆蓋地圖、 標注圖標、 位置跟蹤和繪制形狀. 首先通過MapView實現地圖瓦片數據的加載,然后實現點線面繪制以及定位功能,最后添加Overlay點擊事件實現取點功能.

圖5 任務規劃參數設置界面Fig.5 Task planning parameter setting interface
2.3 基于VR-Forces的虛擬仿真
VR-Forces是一款兵力生成以及戰場仿真軟件,其配套工具豐富,包括想定編輯器、 實體編輯器、 對象參數數據庫編輯器以及地形數據庫工具等,極大地方便用戶進行想定編寫和戰場環境模擬[14,15]. 采用面向對象的思想,其中,每個實體都有對象的行為和屬性,可對戰術指揮訓練、 計算機兵力生成等模擬訓練提供所有必要的仿真模擬.
基于VR-Forces的靶彈訓練虛擬仿真模塊主要是為模擬地面防空部隊在面對敵方來襲的低、 中、 高速靶標的場景下,對士兵操作單兵便攜式防空武器和車載式防空導彈進行針對性的戰術訓練及模擬,并提供對空攔截作戰訓練的輔助決策支持. 基于虛擬仿真模塊的仿真需求,并結合VR-Forces仿真平臺的特點,給出的仿真模塊整體框架如圖6 所示.
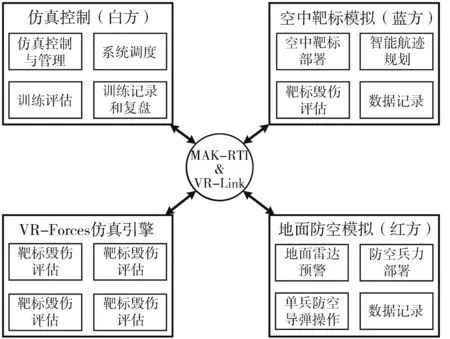
圖6 虛擬仿真模塊整體框架Fig.6 The framework of virtual simulation module
在VR-Forces中,仿真實體用來表示兵力,在環境中扮演角色并對環境做出響應,執行任務,模擬物理行為[15]. 仿真實體是仿真系統中的重要組成部分,也是影響戰術訓練結果的直接因素. 為了可以更加準確地模擬不同平臺和武器之間的交互,需要對仿真環境中訓練場景、 仿真實體和運動學進行實物化建模并在Windows平臺下,基于MAK VR-Forces 4.2,以Visual Studio 2010為開發環境,QT 4.7.4為GUI框架,開發實現虛擬仿真模塊. 其開發流程為:
1) 訓練場景建模. 由于靶彈訓練一般在固定場地,所以選定常用訓練場地并獲取其地形數據(高程數據、 影像和特征數據),然后通過TDB工具制作地形數據文件,將地形數據導出為MTF Files,便可通過VR-Forces進行加載并使用.
2) 仿真實體建模. 采用CAD軟件建立靶彈訓練過程中涉及的靶彈、 單兵導彈及地空導彈模型并導出為stl格式,通過Multigen Creator軟件對模型進行處理并生成VR-Forces可用的flt格式,再通過Entity Editor工具將模型添加到武器和實體庫中以供調用.
3) 實體運動學建模. 實體運動學模型主要用于描述空中靶標和防空導彈的物理行為,可分別定義傳感器、 控制器和執行器來完成實體模型如靶彈和導彈的任務執行和決策、 信息處理以及與其他實體進行交互[16]; 在靶彈虛擬仿真中,可以實現通信模擬、 靶彈探測、 消息傳輸以及修改實體位置、 速度、 毀傷等內容,可以更加真實的模擬實際訓練內容.
4) 靶彈與導彈彈道仿真實現. 由于VR-Forces平臺本身只采用簡單拋物線進行彈道模擬,這樣無法反應真實彈道運動軌跡,所以通過VR-Forces提供的Plug-in接口來實現靶彈彈道控制. 基本流程為: ① 定義一個執行器,通過執行器獲取靶彈或導彈狀態信息(位置、 速度、 運動方向和旋轉速度); ② 定義彈體坐標系和地面坐標系并計算出實體的狀態變化及相關加速度變化; ③ 通過不同時刻和位置及速度計算出實體速度增量、 位置增量、 角速度和角度方位; ④ 將所有信息通過接口Plug-in更新到場景中. 至此便可在VR-Forces中實現靶彈質點彈道方程. 靶彈運動仿真實現如圖7 所示.
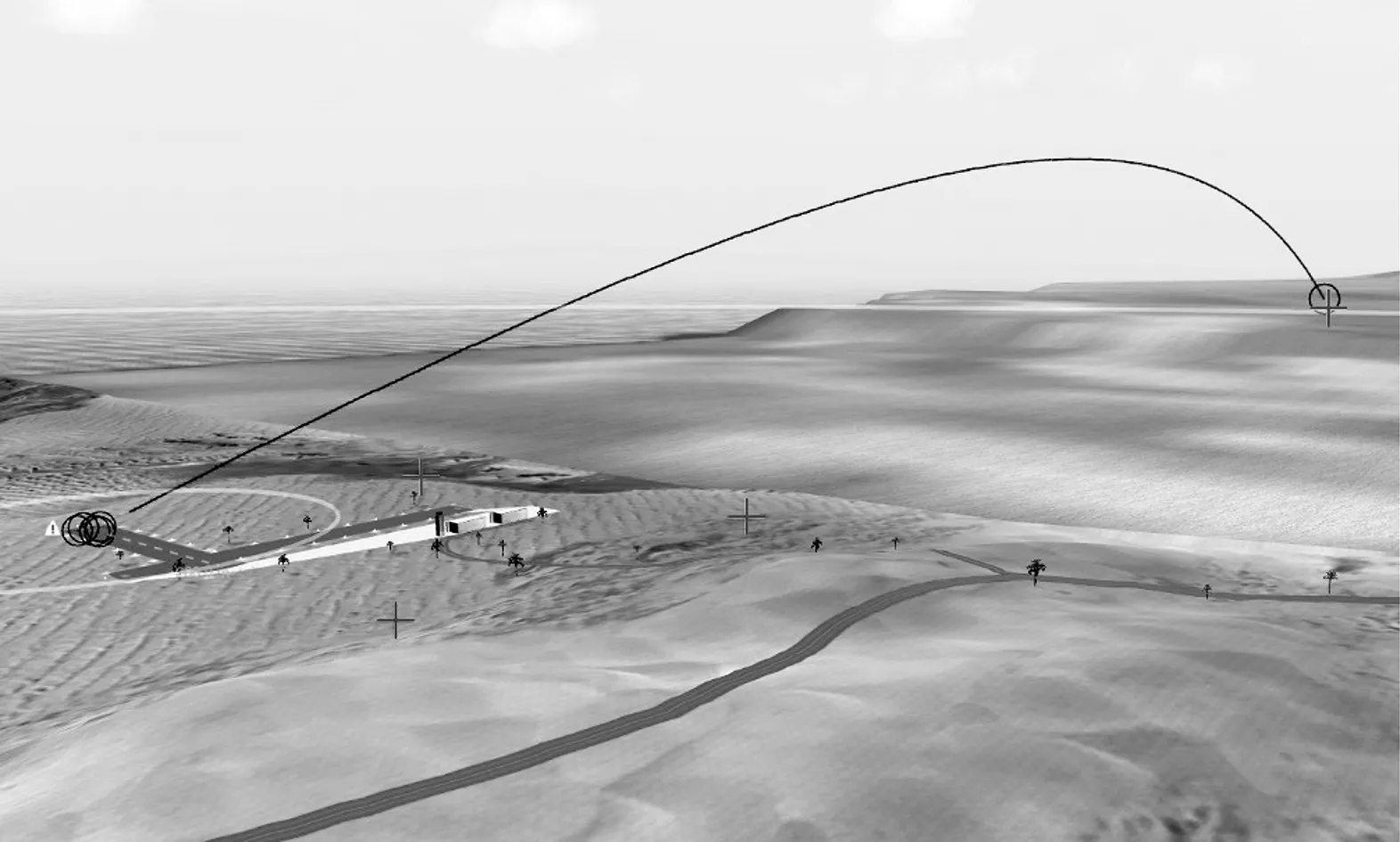
圖7 靶彈彈道仿真Fig.7 Ballistic simulation of target projectile
5) 靶彈與導彈任務分配. 通過以上步驟已經建立了虛擬訓練仿真的基本場景,現通過想定編輯模塊分別為靶彈和導彈編寫Entity Plans,然后通過設置Task向實體分配任務,為導彈設置雷達探測范圍并開啟自主攻擊模型,使導彈可以在發現靶彈目標后自主攻擊.
3 系統功能驗證
為了驗證靶彈任務規劃與虛擬仿真的各項功能,本文選取便攜式地空導彈供靶指標進行仿真分析,各項供靶指標見表 1. 為了方便訓練使用,任務規劃軟件搭載于軍用便攜式平板之上,如圖8 所示,可供訓練人員靈活操作.
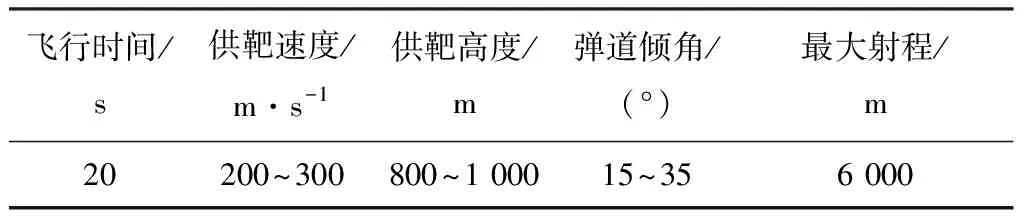
表 1 供靶指標Tab.1 Indicators of target

圖8 硬件平臺Fig.8 Hardware platform
3.1 彈道及射表計算驗證
選定最大射程范圍為5 km~6 km進行射表計算,計算結果如圖9 所示,由此可得滿足供靶指標的靶彈射角應處于32.1°~36.74°之間,此時飛行時間大于26 s,射程小于6 km,靶彈供靶段飛行速度為206 m/s~280 m/s,滿足供靶指標要求.
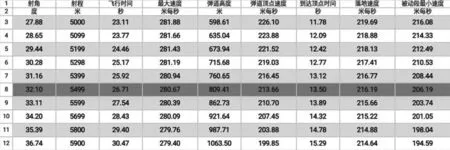
圖9 射表計算結果Fig.9 The result of firing table calculates
3.2 發射任務規劃驗證
任務規劃系統是依據導彈的工作過程及性能指標制定相應的靶彈發射策略和方案,用戶可在地圖上選點,以確定靶彈發射位置和落區,也可直接輸入經緯度坐標來實現選點,選點完成后通過解算給出導彈航路捷徑、 發射位置、 攻擊方式(迎攻或尾追)等參數,并在地圖上展示,以供用戶選擇使用. 在地圖上進行一次任務規劃操作結果如圖10 所示,分別確定靶彈和導彈發射點以及靶彈落區,會自動解算得出任務規劃結果,其中,白線為靶彈彈道,黑線為導彈航路捷徑,圖上還會標記相關訓練信息方便查看.

圖10 任務規劃結果Fig.10 Task planning results
3.3 VR-Forces的虛擬仿真驗證
通過彈道計算和任務規劃確定導彈防空訓練方案后,可在虛擬仿真模塊中進行訓練預演和方案評估,靶彈訓練虛擬仿真場景如圖11 所示,進行虛擬仿真時首先分別布置靶彈發射陣地和導彈陣地,然后分別為靶彈和導彈配置仿真參數及任務計劃,開始仿真后會根據靶彈和導彈飛行路徑預先繪制出運動軌跡如圖中防空訓練場景所示.
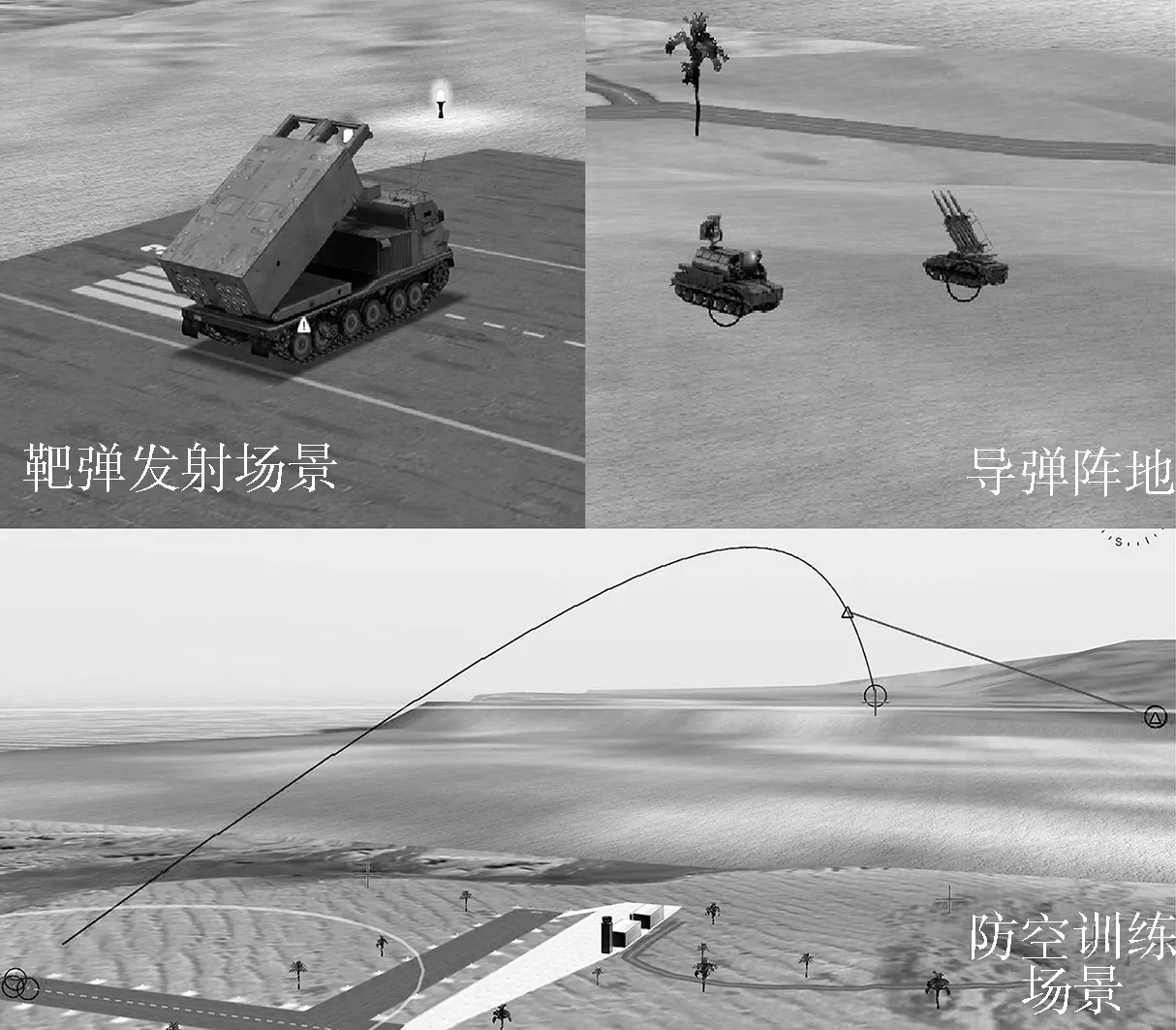
圖11 虛擬仿真場景Fig.11 Virtual simulation scenario
4 結 論
本文針對地空導彈訓練中高速靶彈任務規劃問題,提出了一種基于安卓平臺的高速靶彈任務規劃系統,采用彈道快速解算與混合編程技術實現了彈道與射表的快速計算,使用OSMDroid開發了基于地圖的發射任務規劃模塊; 基于VR-Forces仿真平臺設計和實現了高速靶彈虛擬訓練仿真系統,可進行多種任務場景下高速靶彈與地空導彈的訓練過程,并對仿真態勢進行實時展示; 完成了高速靶彈任務規劃系統開發,經過測試驗證,系統運行穩定,滿足任務規劃要求,可以極大提高地空導彈的訓練次數與質量,有效縮短戰斗力生成周期,降低常規訓練成本.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41