基于SIMULINK的輪轂電機電子差速旋轉控制系統設計仿真
2021-06-10 23:31:34田字
粘接 2021年2期
田字

摘要:基于輪轂電機驅動電動汽車可單獨控制驅動輪,所以在保障靈活性時,進一步提高了電機電子控制要求。據此文章基于SIMULINK設計了輪轂電機電子差速旋轉控制系統,以特殊試驗工況檢驗了控制系統具體效果,即以Matlab軟件設計構建Simulink仿真模型,以此針對仿真結果與系統實際控制效果做了對比。得出結論,電子差速旋轉控制系統可快速有效辨別路面狀況與行駛工況,在直線行駛于對接路面狀態是,系統可控制兩驅動車輪滑轉率于理想范圍,從而切實發揮汽車驅動力;系統可實現汽車轉向時兩驅動輪差速控制,兩輪轂電機轉速與轉向模型的轉速要求相符,誤差可控制于要求標準內。
關鍵詞:SIMULINK;輪轂電機;電子差速旋轉控制
中圖分類號:U469.72 文獻標識碼:A 文章編號:1001-5922(2021)02-0142-04
0引言
在車輛直線運行狀態下,車輪沒有出現打滑現象時,左側與右側輪胎轉矩相等。機械差速控制系統可有效解決車輛轉向時的內輪與外輪轉速不一致,然而此轉向系統存在一定缺陷。電動汽車中縮減大量不必要機械裝置,且驅動輪可基于電機進行獨立控制,實現不同轉速狀態。而以輪轂電機驅動為載體的電動汽車集中電機于車輪,在懸架固定電機主軸,通過外轉子電機帶動車輪旋轉。所以本文面向電動汽車,進行了電子差速旋轉控制系統設計。
1電子差速旋轉控制系統總框架
在車輛行駛時,都會經過直線行駛與轉彎行駛,就直線行駛有效發揮汽車驅動力,轉彎行駛保障車身轉向穩定作為目標,同時顧及車輛行駛時的橫擺運動特征,設計了變滑轉率與橫擺運動相結合控制的電子差速旋轉控制系統。其中基于模糊控制算法設計變滑轉率控制系統,基于PI控制算法設計橫擺運動控制系統。電子差速旋轉控制系統總框架具體如圖1所示。
變滑轉率控制系統通過辨別路面參數,獲取車輛行駛兩驅動輪目標滑轉率于地面縱向峰值附著系數,內控系統就行駛工況、路面狀況、驅動輪行駛形態為依據,面向滑轉率作出正確決策以控制車輪,且以模糊控制器為載體進行車輪轉矩調節量計算;橫擺運動控制系統通過車輛二自由度理想模型進行車輛行駛理想橫擺角速度計算,對比角速度與整車模型所反饋橫擺角速度,基于PI控制算法獲得所需增加于質心的橫擺控制力矩,以適度調整橫擺運動;差動驅動控制系統有機結合前兩者系統,通過特制轉矩分配算法合理分配驅動輪轉矩,促使所輸出驅動轉矩滿足車輛行駛差速不滑轉要求,并保障車輛行駛平穩性,從而確保了車輛操縱穩定性與可靠性。
2電子差速旋轉控制系統結構設計
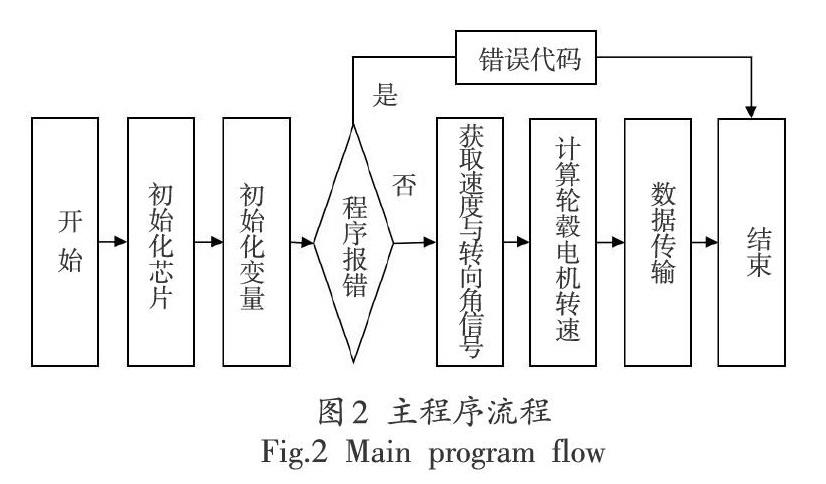
控制系統結構主要為上位機一下位機,基于傳感器總線進行通信。系統主程序初始化處理器,即處理器引腳設置、初始化芯片與變量、獲取速度與轉向角信息、數據傳輸處理。主程序流程具體如圖2所示。
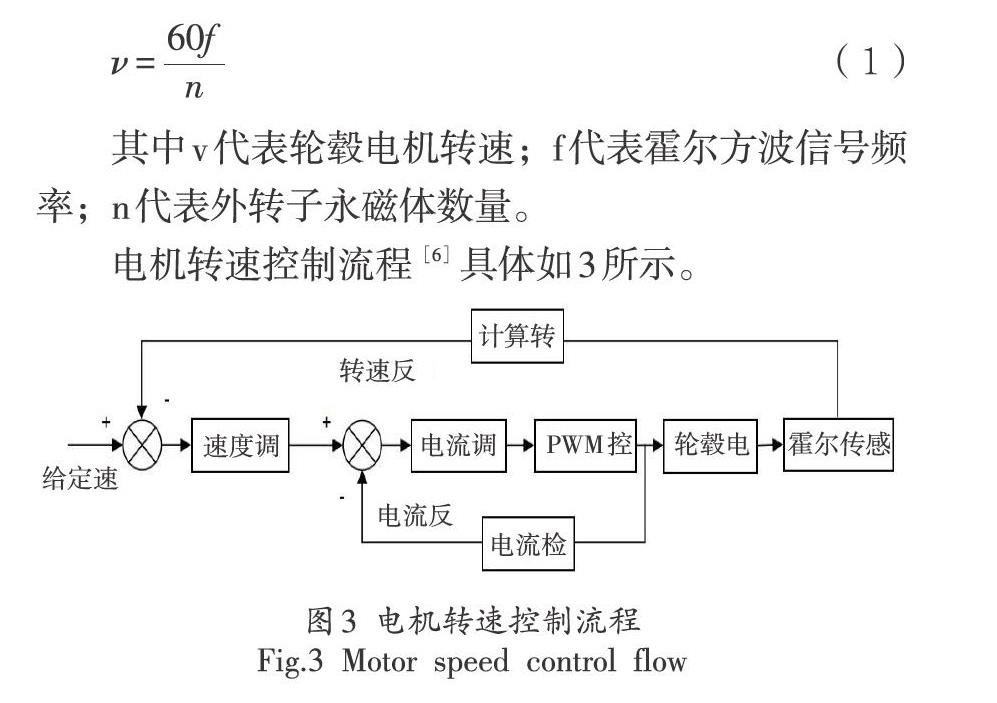
在程序運行初始階段,先初始化芯片與變量。一旦程序發生錯誤則快速報錯,而程序無誤時則持續獲取變量,即行駛速度與方向盤轉向角,以模糊規則表為輔助模糊化變量,基于模糊控制算法對輪轂電機轉速進行計算,就傳感器總線傳送所獲處理之后的數據于下位機。下位機負責就系統主程序所傳輸數據信息,調節輪轂電機轉速。通過調節輸入于功率電路的PwM波占空比,實現電機輸入電流與電機轉速調整。在車輛轉向時,上位機就車輛速度、方向盤轉向角,計算驅動輪所需轉速,同時傳輸于下位機實施。下位機以雙閉環控制模式加以調節電機轉速。基于霍爾傳感器方波信號頻率進行電機轉速計算,即:
3系統仿真分析
3.1構建仿真模型
電子差速旋轉控制系統包含變滑轉率控制系統、橫擺運動控制系統、差動驅動控制系統3模塊。變滑轉率控制系統與差動驅動控制系統基于Matlab Fcun.tion模塊進行程序代碼編寫;橫擺運動控制系統PI控制器環節基于Simulink Liabray模塊庫的PID控制器構建。
3.2結果分析討論
3.2.1突變路面識別與響應能力試驗
設定對接路面為工況,進行突變路面識別與響應能力試驗。所謂對接路面即車輛由高轉到低附著系數路面行駛,以此工況試驗電子差速旋轉控制系統的突變路面快速識別與響應能力。其中,高附著系數路面最大縱向附著系數即0.9;低附著系數路面最大縱向附著系數即0.3;車輛先于高附著系數路面啟動,直線行駛,在2.5s時,突然轉入低附著系數路面;仿真時間為5s。仿真結果具體如圖4、圖5、圖6所示。
由于直線行駛時,驅動輪轉矩變化一致,所以只分析一個驅動輪。由圖可知,在系統不發揮作用時,車輛從高附著系數路面突然轉向低附著系數路面的時候,車輪滑轉率快速變化,車輪瞬時滑轉,這時一旦側向擾動出現,就會導致車輛方向失穩,極易造成側滑甩尾現象。在系統充分發揮作用時,車輛從高附著系數路面突然轉向低附著系數路面的時候,在2.5s時車輪滑轉率突然出現巨大浮動,然而大概在0.5s之后,浮動幅度緩緩縮減,且快速將其穩定于理想范圍。
由圖可以看出,在系統不發揮作用時,路面發生突然變化,其中地面的縱向附著系數明顯迅速下降,這就代表驅動力沒有得到有效發揮。在系統充分發揮作用時,在大約2.5s時,地面縱向附著系數出現較大的明顯低谷期,這主要是因為行駛時路面驟然改變,車輪行駛力超過地面附著力,車輪滑轉率迅速增大,導致車輪實際滑轉率與目標滑轉率出現過大誤差,造成系統輸出過大轉矩調節量,使得驅動輪轉矩迅速下降,但是系統同時快速調節車輪轉矩,在大約0.5s之后,地面縱向附著系數穩定于最大系數區域內,短時間有效調節,所以對于車輛穩定性能影響并不突出。
由圖可知,系統未控制時,右驅動輪轉矩為輸入轉矩的一半。在系統加以控制時,在2.5s路面驟變時,系統開始減量控制驅動輪轉矩,只耗費了1s便實現了調節向系統穩定的轉變,這就說明系統可有效辨別外界路面變化狀況,可迅速調節車輪滑轉率,響應能力良好。
在轉向角是常數時,驅動輪轉速在車速影響下呈現線性增加趨勢。在汽車轉向時,驅動輪實際轉速與理論轉速誤差較小,這就表明系統與設計要求相符。
4結語
綜上所述,文章基于sIMuuNK設計了輪轂電機電子差速旋轉控制系統,并以Matlab軟件為載體進行了仿真分析,結果表明,電子差速旋轉控制系統可快速有效辨別路面狀況與行駛工況,在直線行駛于對接路面狀態是,系統可控制兩驅動車輪滑轉率于理想范圍,從而切實發揮汽車驅動力;系統可實現汽車轉向時兩驅動輪差速控制,兩輪轂電機轉速與轉向模型的轉速要求相符,誤差可控制于要求標準內。