考慮城市不同功能區的電動汽車負荷時空分布建模方法
2021-06-10 02:02:50范磊陳良亮羅雯茜董曉霄袁越
電力建設 2021年6期
關鍵詞:模型
范磊, 陳良亮,羅雯茜,董曉霄,袁越
(1.國網江蘇省電力有限公司,南京市 210016;2.國網江蘇省電力有限公司蘇州供電分公司, 江蘇省蘇州市 215004;3.國電南瑞南京控制系統有限公司,南京市 211106;4.南瑞集團有限公司(國網電力科學研究院有限公司),南京市 211106;5.河海大學能源與電氣學院,南京市 211100)
0 引 言
在能源日益緊缺、環境污染問題顯著加重的當下,電動汽車(electric vehicle,EV)在節約能源、環境保護等方面具有無可比擬的優勢。在可以預見的未來,接入電網的電動汽車負荷必將持續增加。然而,大規模的電動汽車接入將給電力系統的規劃與運行帶來多種挑戰。由于電動汽車充電負荷具有一定的隨機性和聚集性,充電負荷接入電網的位置和容量不同,將會給電網帶來不同程度的影響[1]。因此,明確電動汽車充電負荷空間分布,對研究電動汽車負荷接入電網的影響具有重要意義。
當前對電動汽車空間分布的移動特性的研究,大多數是通過追蹤電動汽車的行車軌跡。傳統方法是應用源點-終點(origin-destination, OD)矩陣。但在車輛和路網規模擴大后,OD矩陣維度將急劇增長,難以實現大規模應用,因此多用各種數學模型[2-6]或出行鏈理論[7-10]得到大區域下的行車軌跡。文獻[2]考慮交通網絡特征,通過多代理技術得到電動汽車負荷的時空分布。文獻[3]與文獻[4]利用最短行駛距離算法確定車輛的行駛路徑。文獻[5]通過聚類分析與歷史數據,提出了一種電動汽車時間和能耗最優的路徑選擇算法。文獻[6]利用非齊次馬爾科夫模型描述電動汽車的行駛模型。文獻[7-9]均以出行鏈為基礎,擬合電動汽車充電負荷的時空特性。文獻[10]建立基于隨機出行鏈和馬爾可夫決策過程的電動汽車負荷時空模型。由于電動汽車的充電特性與城市各區域的地理位置及職能范圍息息相關,而上述文獻使用的模型均以電動汽車的出行特性為視角,未從城市的角度進行宏觀考慮。
近年來計及城市功能區劃分的研究通常只涉及某個具體的場景,例如居民區[11-13]、高速公路快充站[14]等,缺乏對城市內不同功能區的區域特性的綜合考慮,導致預測結果具有局限性。重力模型有利于衡量城市范圍內路網和土地利用對交通分布的影響,可從城市的角度將不同功能區的特性納入電動汽車負荷時空分布的考量范圍,適用于城市規劃清晰、功能類別明確的現代化城市。
基于此,本文提出一種基于改進重力模型的電動汽車負荷時空分布建模方法。首先,對電動汽車進行分類,并根據現有的研究調查結果確定電動汽車的行駛特性,得到電動汽車出行里程分布與充電模式;其次,將城市區域網格化,對城市功能區進行劃分,再依據改進的重力模型獲取城市各時段各區域的出行矩陣,從而得到電動汽車的時空間分布;最后,結合電動汽車充放電的荷電狀態模型,獲得電動汽車負荷的時空分布模型。
1 電動汽車行駛特性與荷電狀態模型
1.1 電動汽車的出行特性與充電模式分析
車輛的出行特性包括車輛離開起始地的時間、車輛到達終點的時間以及車輛的日行駛里程,這些因素會影響車輛的充電負荷。通過對各類型電動汽車(電動私家車與電動公交車)行駛特性的研究,分析處理可得各類車行駛數據并用于計算。
1)私家車用戶行駛特性。2009年美國交通部對美國家庭旅行進行調查研究,最終的統計數據顯示[15],私家車的入網時刻分布、離網時刻分布、行駛里程分布存在一定規律。其中,私家車的單次行程的出行時間及出行起止點與出行矩陣相關(在后文詳述),私家車的日行駛里程服從對數正態分布[7]。
(1)
式中:x代表各時刻;f(x)為概率密度函數;μ是均值;σ是標準差。
電動私家車一般在家、工作地點停留時間較長,在其他區域停留時間較短,因此電動私家車所采用的充電模式由行程終點所在區域決定。若行程終點為居民區、辦公區、工廠等,則進行慢充,否則均為快充。
2)公交車用戶行駛特性。公交車的出行時間比較規律,一般在06:30 開始出發工作,到23:00結束工作才返回。為保障行程的安全性,一般每日進行2次充電[16],因此可認為電動公交車在10:00至13:00的換班期間進行1 h的快充,在 23:00至次日06:30的夜間進行慢充。電動公交車的行駛路程相對固定,其日行駛里程滿足正態分布,充電場所均為公共設施(充電)區。
1.2 電動汽車的荷電狀態模型
以主流的鋰電池為例,對單輛電動汽車的充放電特性進行分析。由于鋰電池的充電過程以恒功率充電階段為主,預充電階段和恒壓充電階段的時間非常短[17],本文近似認為電動汽車的充放電過程中功率恒定。
電動汽車動力電池的荷電狀態(state of charge,SOC)與已行駛距離成反比,隨著行駛距離的增加線性下降。
(2)
式中:SSOC,t0為入網時刻t0電池電量c與電池容量cmax的比值,即為入網時刻電池SOC;d為上次充電后已行駛的路程;dm為電動汽車的標準續航里程。
單輛電動汽車接入充電樁后,首先判斷是否需要充電。若電動汽車行駛終點為居民區,則開始進行慢速充電;若行駛終點為其他區域且電量在60%以上,則無需充電。若需充電,其充電需求S與入網時刻電池荷電狀態SSOC,t0、電池容量cmax的關系可以表示為:
S=(1-SSOC,t0)cmax
(3)
電池t時刻的SOC值SSOC,t與充放電功率P、充放電效率η的關系可以表示為式(4),其中充放電功率P由所采用的充電模式(快充/慢充)決定。
(4)
為滿足車主的出行需要,認為電動汽車每次充電均充滿。由于電動汽車的充放電過程中功率恒定,因此充電時長ts可以由下式表示:
(5)
2 基于改進重力模型的電動汽車時空分布模型
電動汽車一般在停泊位置進行充電,因此電動汽車負荷的時空分布與各地區各時刻的流量息息相關。本文綜合考慮不同城市功能區的特性、路網和土地利用以及交通阻抗對交通分布的影響,依據改進的重力模型對電動汽車的空間分布進行預測。
2.1 城市功能區劃分
城市用地類型主要包括居住用地、公共設施用地、工業用地、倉儲用地、對外交通用地、道路廣場用地、市政公用設施用地等。本文主要對預測城市進行商業區、居民區、工業區、辦公區、公共設施區、公園的劃分,具體分為不同的交通區。
引入出行矩陣來描繪各交通區各時刻的到達率(以該區域為終點的概率)。設定該交通區的出行矩陣為:
(6)

2.2 傳統重力模型
重力模型又稱引力模型,由Casey提出,它考慮了交通阻抗對出行分布的影響。傳統重力模型主要有簡單重力模型法、單約束重力模型法和雙約束重力模型法。重力模型法的優點在于直觀且容易理解,并考慮了路網和土地利用對交通分布的影響,對基年出行量為0的地區也可以進行估算。
根據重力模型,交通區i、j之間的出行量與交通區i的產生量和交通區j的吸引量的乘積成正比,與交通區i、j之間的交通阻抗成反比。其基本公式如下:
(7)
式中:βij為交通區i、j之間的出行量;α為調整系數;Zi為交通區i的交通產生量;Qj為交通區j的交通吸引量;Fij為交通區i、j之間的交通阻抗。
2.3 基于改進重力模型的出行矩陣計算
各交通區的到達率與該交通區的特性相關,并滿足重力模型思想,即與各交通區之間的交通出行量成正比關系,與交通阻抗成反比關系。而傳統重力模型的缺點在于其采用集計模型分析交通出行,其道路交通阻抗、交通產生量、交通吸引量均為恒定不變的,無法針對一天中的不同時段進行動態分析,由此造成與實際情況存在一定的偏差。因此,本文設置隨時間變化的交通區出行力與地區吸引力參數,以此替代傳統重力模型中的交通區的交通產生量和交通吸引量,從而規避傳統重力模型參數為靜態的缺點,建模思想如圖1所示。
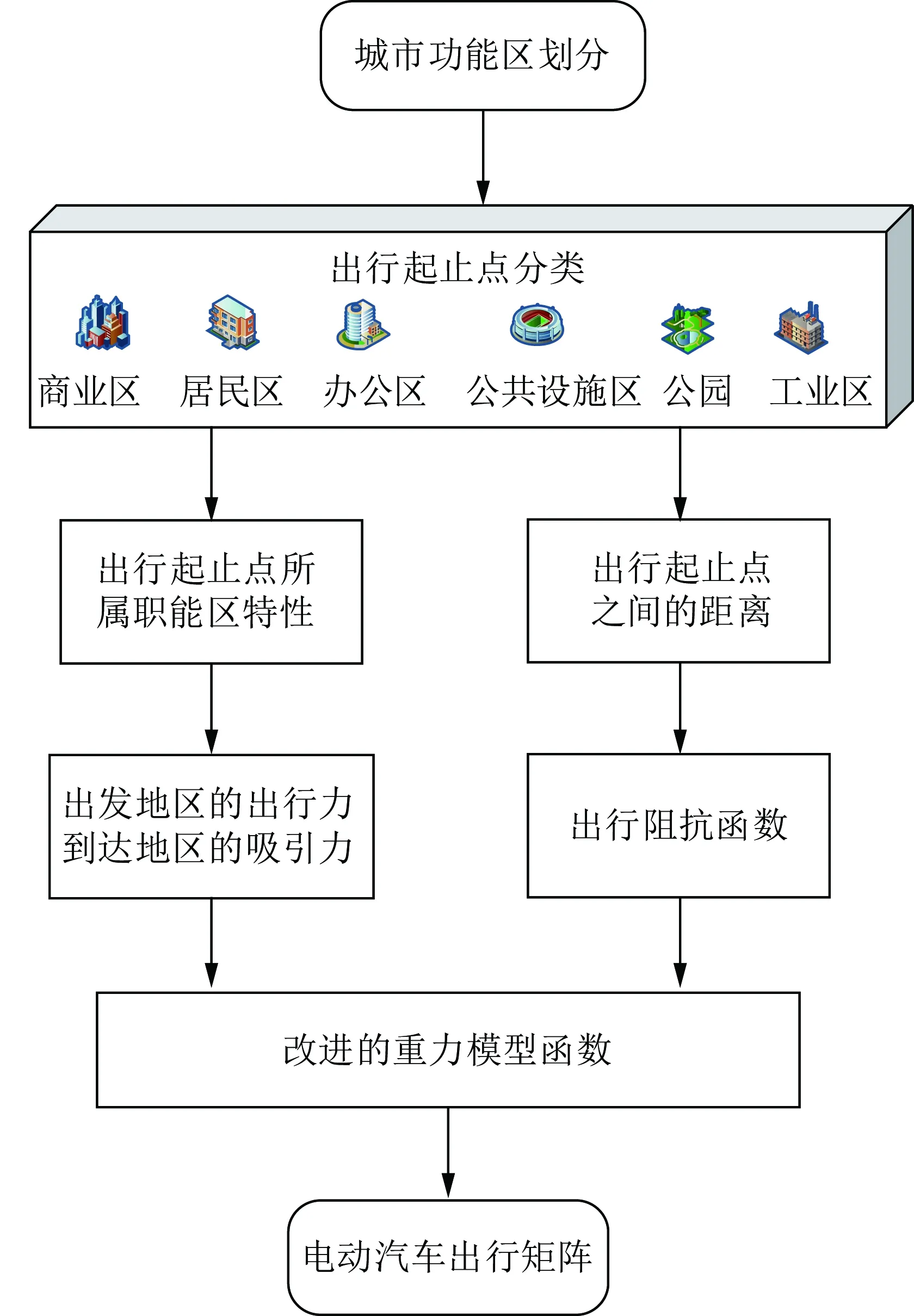
圖1 電動汽車出行分布預測建模思想Fig.1 Modelling idea of EV travel distribution prediction
首先根據土地使用情況,將城市進行功能區劃分,再根據地理位置劃分為不同交通區,由出行起止點所屬區域確定出發地的出行力與到達地的吸引力。其次,由兩地之間的距離確定出行阻抗函數,代入改進的重力模型函數即可求取電動汽車出行矩陣。具體步驟如下:
電動汽車行駛里程分布滿足對數正態分布,地區之間的阻抗由兩地之間的距離決定,因此各交通區之間的交通阻抗Fij用式(8)表述:
(8)
式中:f2(·)為概率密度函數;μ2是均值;σ2是標準差;lij為交通區i到交通區j的距離。本文中μ2=2.78,σ2=0.82。

(9)


(10)
由式(10)可以計算出待定的調整系數θt的值。
(11)
2.4 充電負荷計算及仿真流程
根據上述理論分析,設計電動汽車充電負荷預測的仿真流程,如圖2所示。
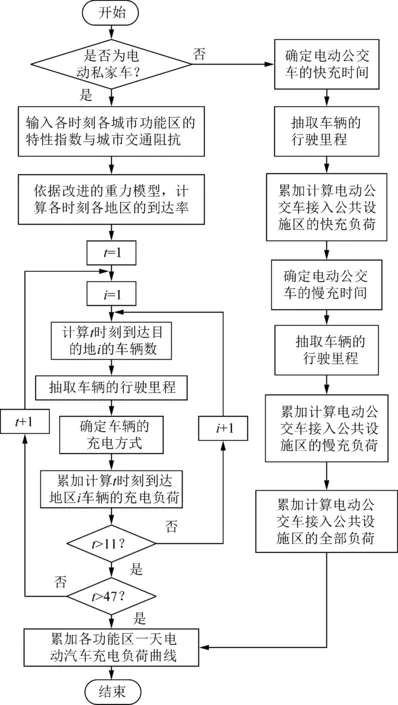
圖2 電動汽車充電負荷預測流程圖Fig.2 Flow chart of EV charging load prediction
本文將城市分為N個交通區,將一天分為48個時段(每個時段為0.5 h),并將電動汽車分為電動私家車與電動公交車進行分析計算。電動公交車的出行路徑、充電方式、充電時間地點固定,抽取車輛的出行里程,結合車輛的荷電狀態模型,即可求出當日的充電負荷曲線。電動私家車的出行矩陣則由各時段各類區域的特性指數(地區出行力與地區吸引力)確定。區域的特性指數由該區域所屬的城市功能區的類別決定,是隨時間變化的已知量,根據滴滴大數據平臺(https://gaia.didichuxing.com)提供的出行數據統計分析得到[18]。由出行矩陣確定該城市t時刻到達目的地的汽車數量Vt,由式(3)抽取該時段每個車輛的日行駛里程以確定該車輛入網的初始SOC,根據t時刻各個區域的出行矩陣確定每個車輛的入網位置,結合式(4)—(8)計算出t時刻的充電負荷時空分布。
3 算例分析
3.1 算例參數
本文以A市作為對象進行研究,該城市區域模型構架以文獻[19]中的算例模型作為樣本。A市的用地規劃如圖3所示,共分為6個功能區類別、A1至A12共12個區域。
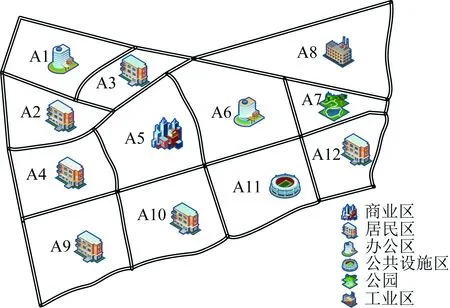
圖3 A市的功能區劃分Fig.3 The urban functional area division of city A
表1展現了A市各區域編號所對應的類別,能夠更為直觀地對各區域的類別進行一一對應。
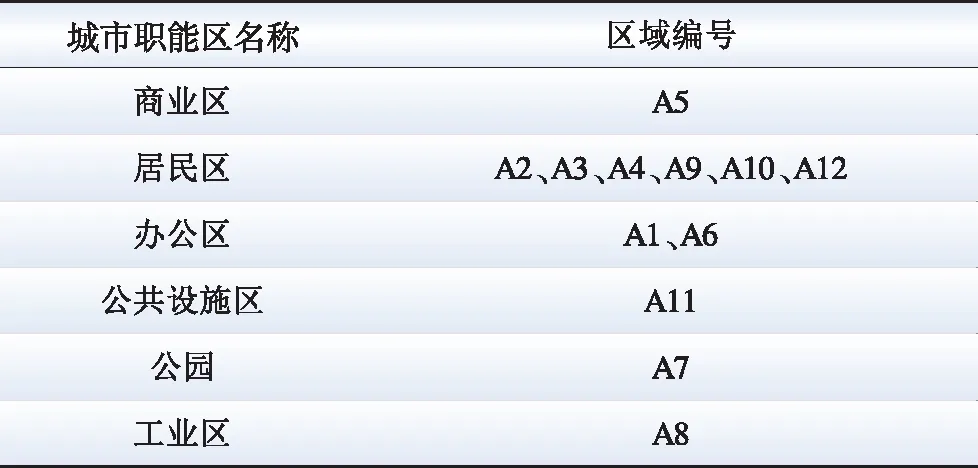
表1 A市各區域所屬的城市功能區名稱Table 1 Names of the urban functional area of each region in city A
假設A市日均產生10 000條電動私家車上路行程和200條電動公交車上路行程。將一天24 h分為48個時段,每個時段為0.5 h,第一個時段結束時刻為當日00:30,最后一個時段結束時刻為第二日00:00。
A市各地區之間的距離指各個地區地理中心點之間的距離,具體數值見附錄表A1。根據各地區之間的距離,代入式(8),可計算出各地區之間的阻抗Fij,具體數值見附錄表A2。阻抗函數可衡量各區域之間市民的出行意愿,兩地之間的數值越高,則表示兩地市民往來的交通流量越小,阻抗函數分布如圖4所示。
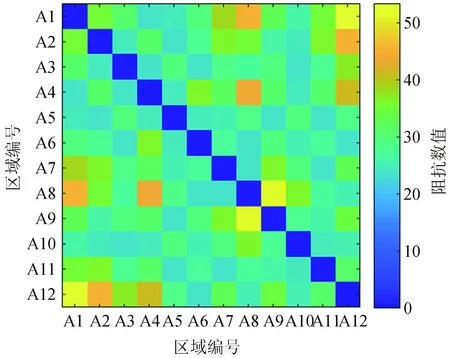
圖4 A市的各區域之間的阻抗函數Fig.4 The travel intention between different regions in city A
需要特別說明的是,地區出行力及地區吸引力由各地區的類型特性決定,且隨時間動態變化,具體數值如附錄圖A1與A2所示。
由于電動汽車的型號與類型種類繁多,根據實際情況,本文分別參考比亞迪E6型電動汽車與比亞迪K9型電動公交車的車輛參數[16],設置A市的電動汽車電池參數均值,如表2所示。
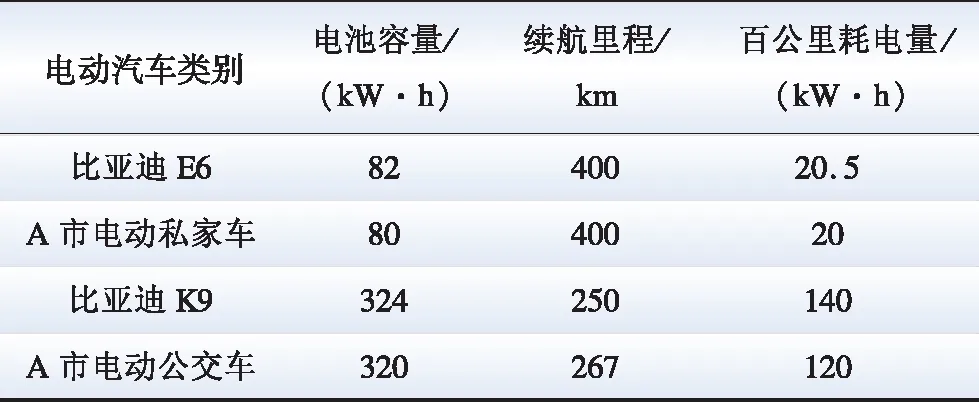
表2 電動汽車的參數Table 2 Parameters of electric vehicles
如式(1)所示,電動汽車的行駛里程呈對數正態分布,選取μ=2.78,σ=0.82。一日內電動公交車的行駛里程呈正態分布,選取均值為100 km。
考慮適用性與普遍性,本文采取鋰電池進行充電模式建模。電動汽車的充電模式主要有常規模式、快速充電模式和更換電池模式。結合實際情況,本文電動私家車在到達地點為居民區、辦公區、工廠時進行慢充,其余地區則進行快充;電動公交車在10:00至13:00的換班期間進行1 h的快充,在 23:00至次日06:30的夜間進行慢充。鋰電池的充電過程具有近似恒功率特性,因此將充電功率P視為常數,在慢充情況下充電功率為8 kW,在快充情況下充電功率為60 kW[20]。由于鋰電池具有能量密度大、自放電小等優點,其充電效率通常可達到95%及以上,為方便計算,本文取充電效率η為100%。
3.2 電動私家車負荷的時空分布建模結果
A市各時段入網電動汽車的行駛里程分布如圖5所示。由圖5可知,在城區內市民的行駛里程基本在30 km以內,大部分車主選擇在早晨出發與傍晚結束行程,出行高峰出現在清晨上班與傍晚下班返程這2個時段,符合人們的日常作息習慣。
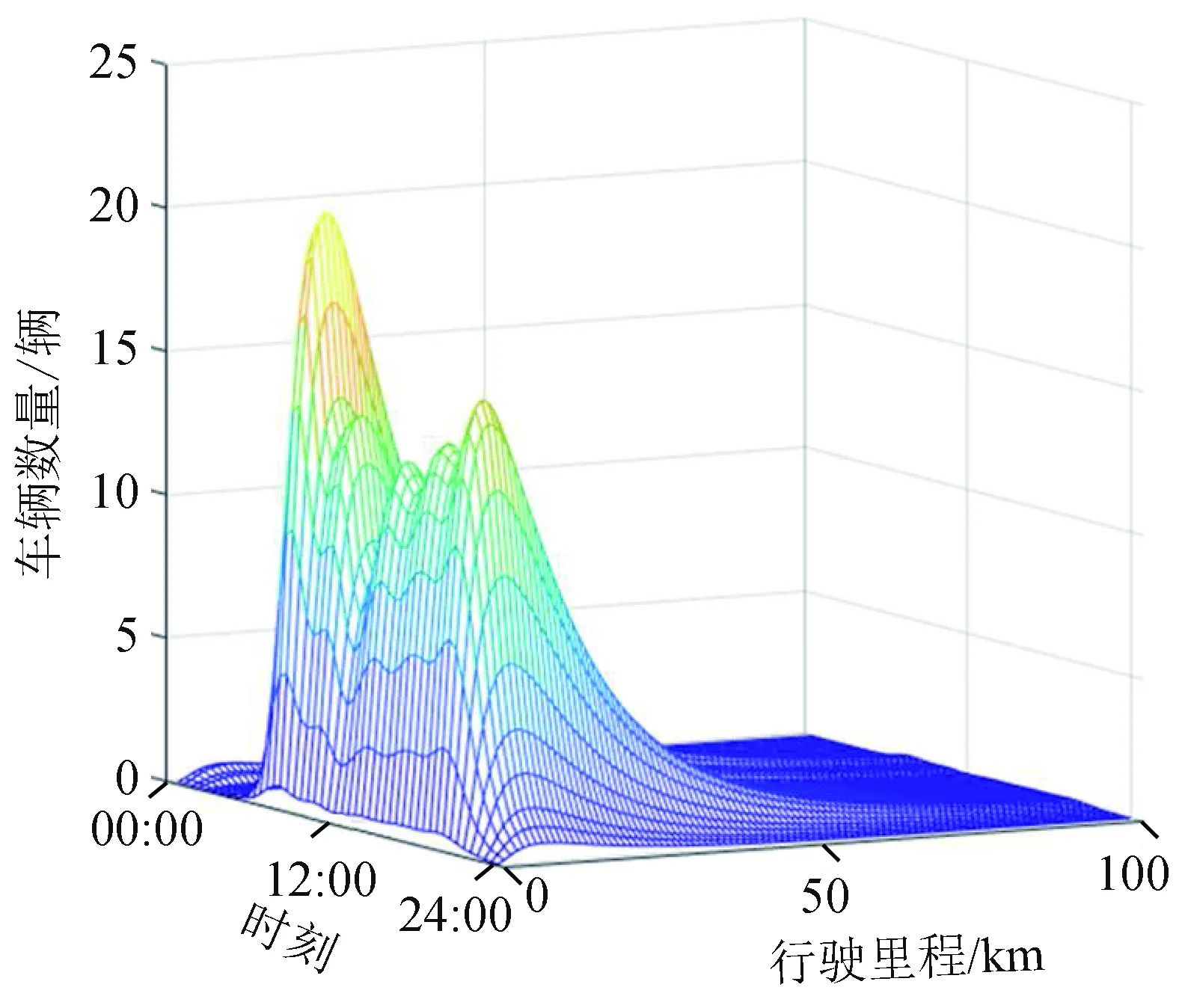
圖5 各時刻入網電動汽車行駛里程分布Fig.5 Distance distribution of EVs integrated into power gird at each moment
本文首先選取同一功能區類別但坐落在不同位置的區域進行橫向對比。A市居民區各時刻的充電功率如圖6所示。通過對比得知,各區域的充電功率變化趨勢大致相同,但數值略有差異。由于所處的空間位置不同,A2、A4、A9、A12地區的充電功率比A3與A10更低。相較于其他居民區,A3與A10的位置更為中心,道路阻抗更小,因此更容易被選為出行終點。
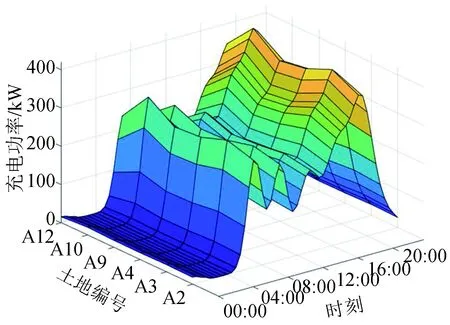
圖6 各時刻居民區的充電功率Fig.6 Charging power of different regions of residential areas at each moment
此外,本文將傳統重力模型與改進重力模型的充電功率仿真結果進行對比,如圖7所示。
圖7(a)中各區域的充電功率變化趨勢一致,僅有數值大小上的差異,表明傳統重力模型不能很好地描述一天中各功能區充電功率的動態特性,仿真結果不準確。圖7(b)中改進的重力模型可刻畫不同類別的城市功能區之間充電功率曲線的動態差異:工業區與辦公區充電功率峰值時段大致相似,均為上午上班時刻,公園與公共設施區充電負荷主要集中在午后及傍晚的休閑時段,商業區在午休及夜間時段迎來充電高峰,居民區的充電負荷主要集中在傍晚至夜晚的返家時段。
3.3 不同場景下仿真結果的對比分析
為進一步驗證所提模型的準確性與普遍適用性,本文設置以下3種場景進行對比分析。
場景1:加入電動公交車的城市充電負荷。除電動私家車外,電動公交車由于其噪音小、行駛平穩、無排放等特性,被逐步運用在了各大城市的公共交通上。
由于電動公交車充電地點唯一,為公共設施區下屬的公共充電區,因此本文對比加入公交車負荷前后的公共設施區的充電功率,分析結果如8所示。
由圖8可以看出,在中午換班前后的快充階段,電動公交車接入電網的充電負荷較大,易對電網產生較大的沖擊。
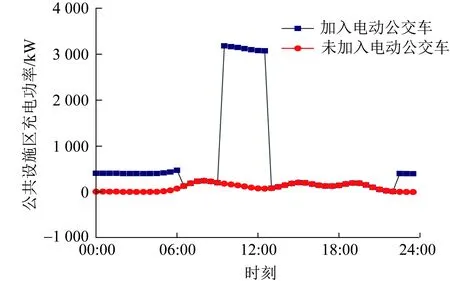
圖8 公共服務區有無電動公交車的充電功率Fig.8 Charging power of public service area with or without the charging power of electric buses
場景2:城市商業區擴建后的充電負荷。近年來,人們外出購物、品嘗美食、觀看電影等一系列娛樂活動的需求不斷增多,原有商業區的規模可能無法滿足人們的需求,因此將城市商業區覆蓋范圍進行擴大。本文分別對比商業區擴建前后城市的商業區與公共設施區的充電功率,分析結果如9所示。
由圖9可得,在商業區擴建后,商業區自身的充電功率曲線趨勢與未擴建時的大體一致,但充電功率數值有了較大的增長。擴建后的商業區服務設施更加完善,能同時容納更多市民。由于商業區(A5)與公共設施區(A11)距離較近,擴建后的商業區帶動了周邊的公共設施區,因此該區的充電功率數值也有了一定的提升。與此同時,居民區充電功率曲線有了一定程度的時延,在商業區擴建后娛樂項目增多的情況下,部分市民返家的時間有所延后。
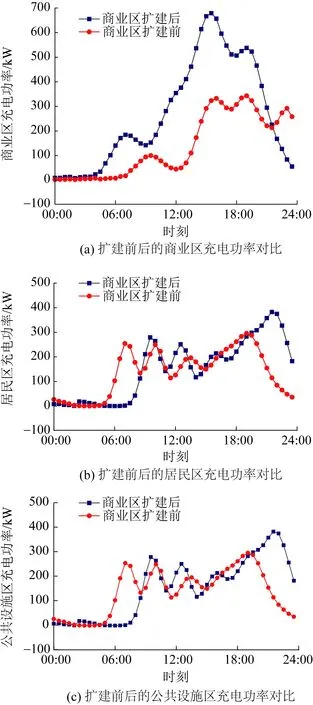
圖9 城市商業區擴建前后城市的充電功率Fig.9 Charging power of the city with or without the expansion of urban business district
場景3:市民辦公時長增加后的充電負荷。在年底等工作量增加的時段,市民的工作時間可能延長。現將A市市民的上班時間提前、下班時間往后順延,市民辦公時間增加前后的充電功率對比如圖10所示。
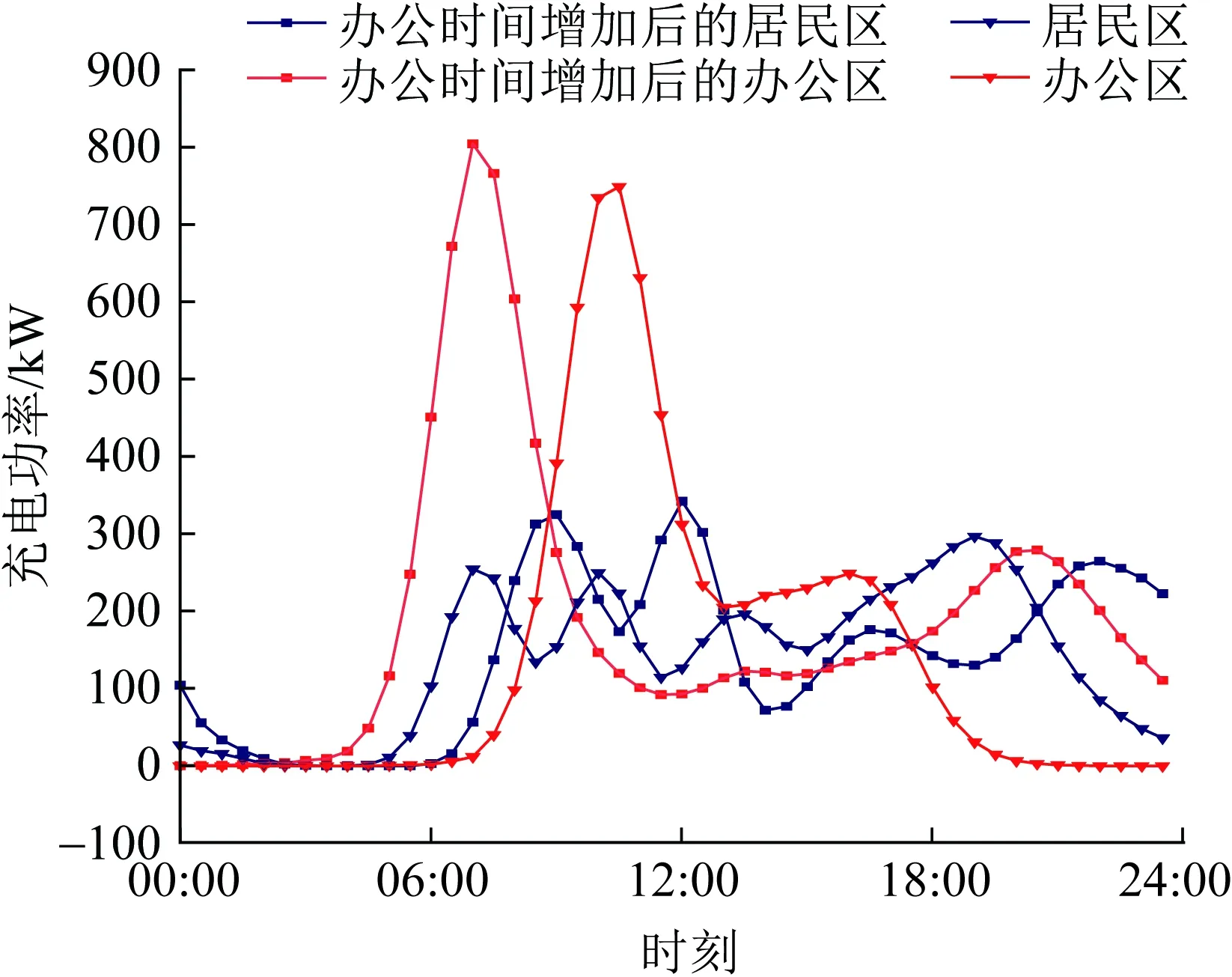
圖10 辦公時間增加前后城市的充電功率Fig.10 Charging power of the city with or without the increase of working hours
在市民辦公時長增加后,早間時段辦公區的充電負荷峰值前移,晚間時段充電負荷峰值后移,同時居民區充電功率峰值后移且數值略微下降。在工作時長增加后,選擇在辦公區進行充電的車主增多,且返家的時間明顯后延。
4 結 論
本文依據重力模型思想,考慮了不同城市功能區的特性以及電動汽車的種類與充電方式,對電動汽車負荷時空分布進行了研究。本文提出的方法規避了傳統重力模型僅采用靜態參數的缺點,地區產生力和地區吸引力不再是一成不變的參數,其數值隨著各個時刻動態變化。分析結果表明,不同類別的城市功能區之間負荷分布差異較大且與各區域吸引力相關;屬于同一類別但處于不同地理位置的地區之間的負荷分布也略有差異,位于城市中心地區的負荷較高。在城市功能區擴建、市民生活節奏改變后,各地區的功率曲線將發生相應變化。
依據本文算例的結果,可進行換電站的規劃、交通規劃、電網規劃以及運行調度控制的影響等后續研究。有助于電動汽車作為虛擬儲能在城區內進行合理調度,從而達到削峰填谷、消納可再生能源的目的。此外,本文在仿真中忽略了一些影響因素,例如電池使用的損耗、真實路況對耗電量的影響,駕駛員主觀行為等,后續可針對以上因素對各地區進行更為精細化的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19