兩關節繩驅式欠驅動手爪設計與仿真分析
2021-06-05 07:03:14王遠行劉玉旺朱樹云楊尚奎
機械設計與制造 2021年5期
王遠行,劉玉旺,朱樹云,楊尚奎
(1.中國科學院沈陽自動化研究所機器人學國家重點實驗室,遼寧 沈陽 110016;2.中國科學院機器人與智能制造創新研究院,遼寧沈陽 110016;3.中國科學院大學,北京100049)
1 引言
欠驅動機構即是機構的驅動源少于機構自由度一種機構,因而在欠驅動機構抱持物體的過程中,存在未被控制的自由度,抱緊機構未被驅動的自由度能夠很好的適應物體形狀,達到自適應的效果[1-2]。同時欠驅動機構具有結構簡單,控制方便,驅動源較少,因而其應用范圍越來越廣泛。
欠驅動手爪按照傳動方式的不同可以分為連桿機構、腱—滑輪機構,齒輪鏈傳動機構,每種機構都具有各自的優缺點和應用范圍[3-4]。選擇腱—滑輪傳動形式的欠驅動手爪作為攀爬機器人的抱持機構。此抱持機構是采用兩指兩關節的結構形式,是一種擬人靈巧手的結構,每個手指均有一根鋼絲繩進行驅動,因而很容易實現抱持機構的欠驅動形式。除了繩驅式欠驅動機理所帶來的自適應性,由于鋼絲繩本身具有一定的彈性,在受力時會產生一定程度的彈性變形,從而帶來了更好的自適應性。因而此機構作為攀爬機器人的抱持機構能夠滿足機器人本體對抱持機構的性能要求。
對繩驅式欠驅動手爪進行運動學和動力學的仿真,能夠驗證兩指兩關節手爪抱持的可行性,從仿真的角度驗證繩驅式欠驅動手爪作為攀爬機器人抱持機構的可行性。傳統的鋼絲繩的建模仿真方法包括離散柔體建模、宏命令建模,模態中性文件建模。上述三種方法在繩驅式欠驅動手爪的仿真中,均具有一定的局限性,并且建模過程相對復雜。采用了多體動力學軟件ADAMS 中的Cable 模塊對繩驅式的欠驅動手爪進行運動學和動力學的仿真。具有仿真效率高,仿真過程簡便的特點,為繩驅式欠驅動手爪的仿真研究提供了一種新的研究思路。
2 繩驅式欠驅動輪手模型建立
2.1 原理構思
繩驅式欠驅動手爪作為攀爬機器人的抱持機構,使攀爬機器人在攀爬的過程中能夠附著在桿件上。因而手爪在抱持桿件過程中,必須使機器人本體與桿件之間有一個正壓力,正是此正壓力提供了攀爬機器人攀爬的驅動力。正是由于攀爬機器人抱持機構所具有的抱持特點,提出一種繩驅式欠驅動手爪的構思[5],如圖1 所示。
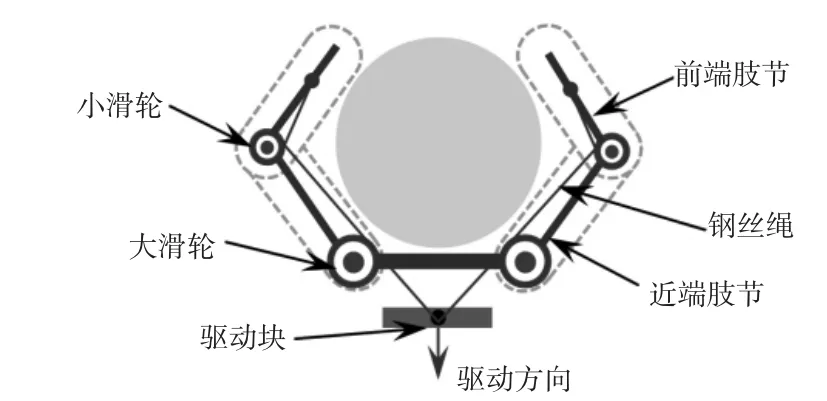
圖1 欠驅動手爪原理示意圖Fig.1 Schematic Diagram of Underactuated Gripper
2.2 模型建立
由圖2 可知攀爬機器人的抱持機構由兩個手指組成,每個手指上具有兩個肢節,每個關節處安裝有半徑大小不同的滑輪,鋼絲繩的一端固定在前段肢節上,然后纏繞在小滑輪上,并在同一方向纏繞在大滑輪上,最終固定在滑塊上,當滑塊朝一個方向移動時,鋼絲繩收縮,從而使手爪完成抱持動作,能夠滿足攀爬機器人對于抱持機構的性能要求。以此原理圖建立的攀爬機器人抱持機構的簡化模型,如圖2 所示。
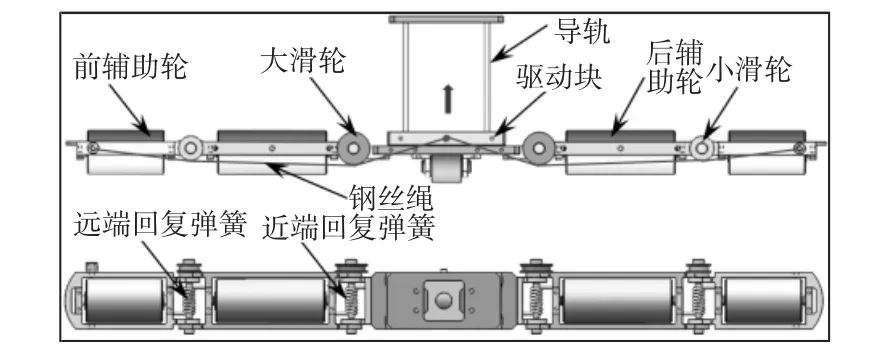
圖2 繩驅式欠驅動手爪的三維模型Fig.2 Three-Dimensional Model of Rope-Driven Underactuated Gripper
此欠驅動手爪是攀爬機器人的抱持機構,為了輔助手爪在抱持桿件的過程中能夠輔助機器人爬行,因而每個肢節上裝有輔助輪,為了能使手爪按照預先設定的抱持動作,在兩個關節中間裝有剛度不同的回復彈簧,以使手爪能夠按照預先設定的形狀抱持桿件。
3 靜力學模型建立
在繩驅式欠驅動機構中,手指與物體的接觸力除了與自身的設計參數如肢節長度、回復彈簧的剛度、滑輪的半徑、被抓取物體的形狀及尺寸等因素有關系外,還直接由鋼絲繩的驅動力決定[6]。當欠驅動輪手在抱持圓形桿件時,穩定狀態時的受力狀態,如圖3 所示。
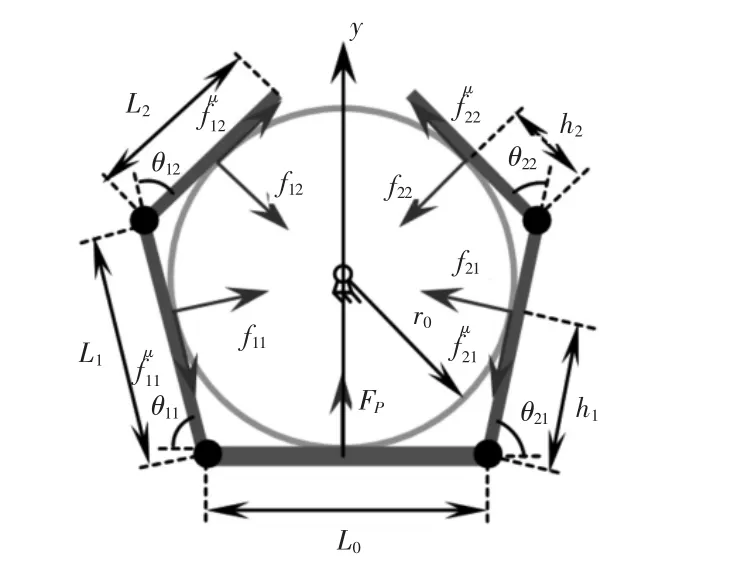
圖3 抱持穩定時手爪的受力狀態Fig.3 The Force State of the Gripper in Grasping Stability
根據虛功原理可以得到驅動力矩和各肢節接觸力的關系式:

式中:t—由驅動器和兩指節間彈性元件產生的輸入轉矩矢量;wa—相應關節的角速度矢量;ξi—指節i 上接觸點的運動螺旋(假設每直接只有一個接觸點);ζi—指節i 上接觸點的力螺旋;運算符*—指運動螺旋和力螺旋在平面內的互逆積。因而對于兩肢節繩驅式欠驅動機構可以得到:
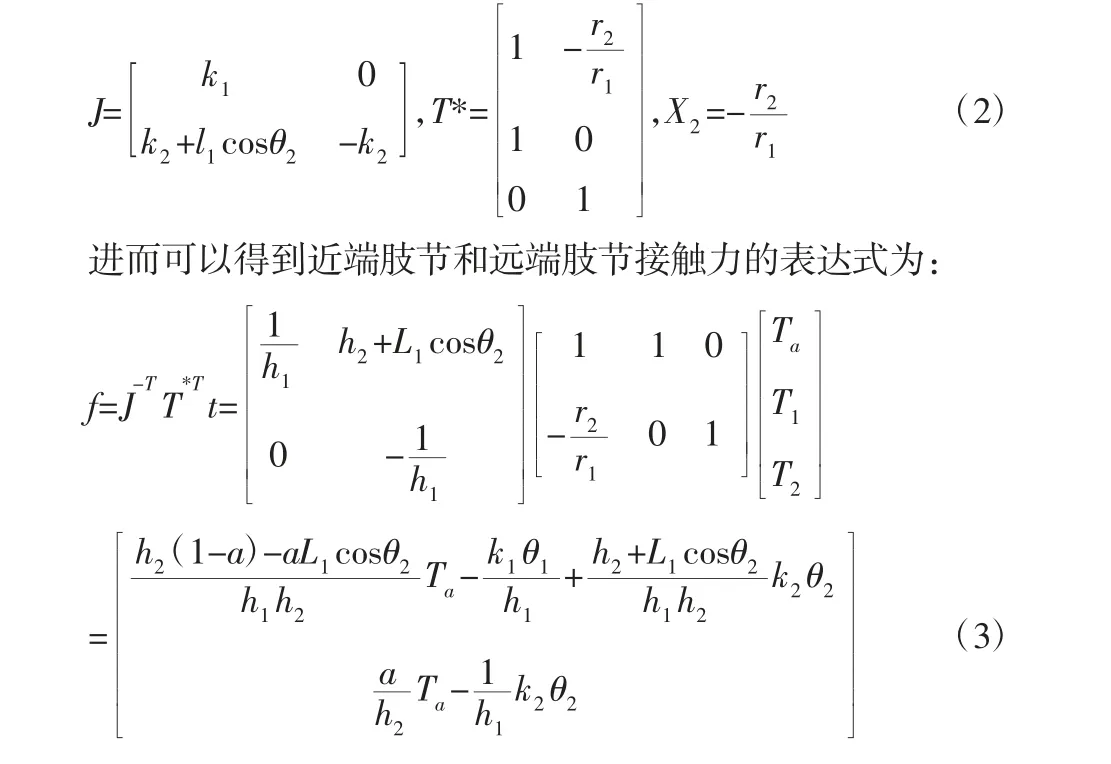
式中:Ta—驅動扭矩;T1=k1θ1—回復彈簧1 產生的扭矩;T2=k2θ2—回復彈簧2 產生的扭矩;θ1,θ2—關節1、2 的轉角;k1,k2—回復彈簧1、2 的剛度;h1,h2—各肢節與物體肢節的接觸力;α—兩關節處滑輪的半徑比。
因為設計的繩驅式欠驅動手爪是對稱式的結構,在穩定抱持桿件以后,左右手指對應肢節上的接觸力和摩擦力是對應相等的,因而根據靜力分析可以得到攀爬機器人本體與桿件之間的接觸力為:

此節建立了欠驅動抱持機構的靜力學模型,從此靜力學模型中可以得出抱持穩定時各肢節、中間輔助輪與桿件之間的接觸力與各參數之間的關系。對于本設計的欠驅動手爪而言,所有的量都是固定的,因而在抱持過程中,手爪的接觸力只由被抱持桿件的半徑r0和驅動力決定。
靜力學模型的建立,為欠驅動抱持機構的設計提供了理論上的支持,并且所涉及的桿件與輔助輪之間的正壓力Fp的大小是攀爬機器人攀爬能力的一個重要體現,因而此模型的建立又為攀爬機器人的整體設計提供了理論支持。
4 基于ADAMS 的仿真分析
對欠驅動手爪進行仿真分析不僅能夠驗證手爪作為攀爬機器人抱持機構抱持桿件的可行性,同時也可以驗證在抱持穩定以后手爪接觸力模型的正確性。這些參數對于攀爬機器人整體的研究所具有非常重要的作用。由于設計的手爪是采用鋼絲繩進行驅動的,屬于柔順體仿真的范疇,傳統的鋼絲繩建模方法比較復雜,同時仿真的時間較長,并且不容易實驗鋼絲繩對于滑輪的纏繞,因而不能完全反應鋼絲繩實際的物理狀態。為了能更好更真實的模擬鋼絲繩在驅動欠驅動手爪時的真實狀態,采用了多體動力學仿真軟件ADAMS/Cable 進行仿真分析[7-10],具有仿真高效和仿真過程簡單的特點。
4.1 虛擬樣機建模
本欠驅動輪手是利用Solidworks 進行參數化三維建模的,將欠驅動輪手導入至ADAMS 并進行定義各零件的質量屬性,添加零件的約束條件以及驅動。欠驅動輪手的虛擬樣機模型,如圖4所示,各部件之間的約束關系,如表1 所示。
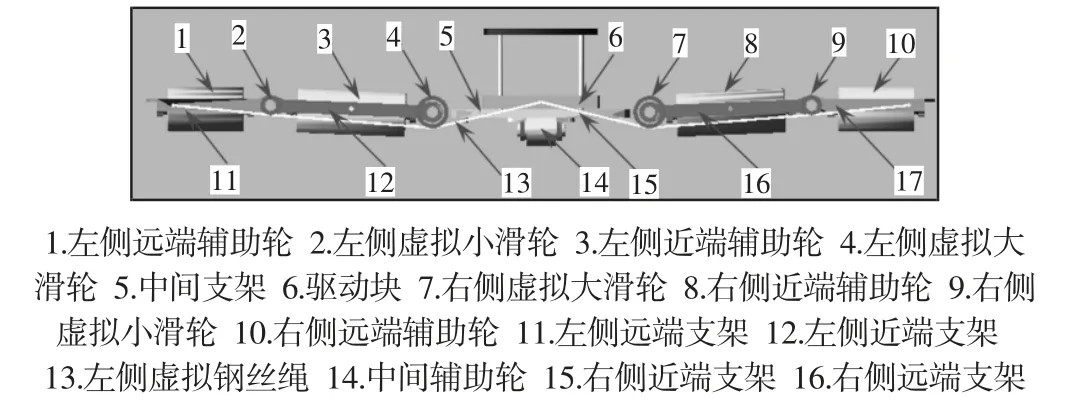
圖4 欠驅動輪手虛擬樣機模型Fig.4 Virtual Prototype Model of Underactuated Wheelhand
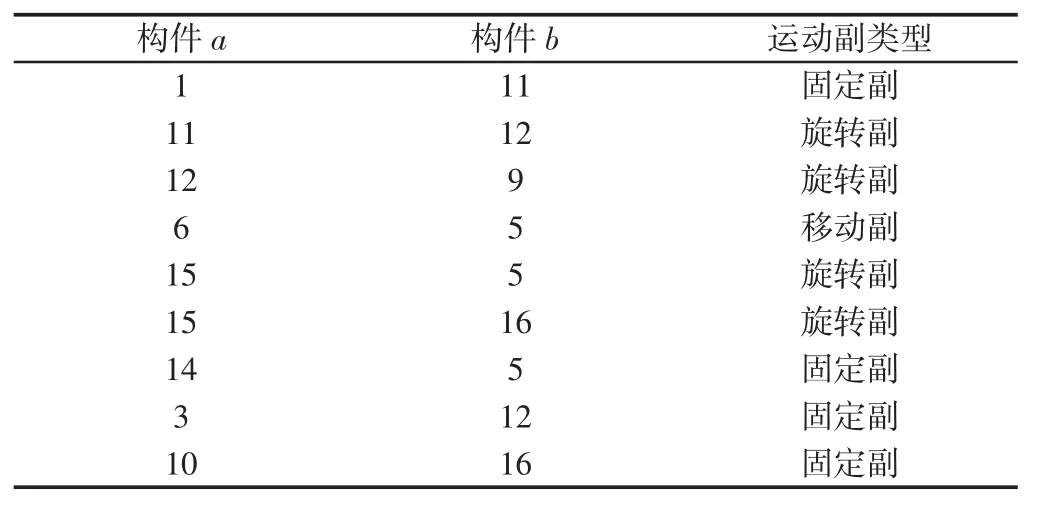
表1 欠驅動輪手主要部件約束關系Tab.1 Constraint Relation of Main Components of Underactuated Wheelhand
4.2 鋼絲繩驅動系統建模過程
利用ADAMS Machinery 模塊中Cable 工具激活鋼絲繩系統創建向導,采用簡化方法創建由Anchor、Pulley 及Cable 組成的欠驅動輪手鋼絲繩驅動系統參數化模型。仿真的目標強調在鋼絲繩的驅動下手指的運動效果以及穩定狀態下接觸力和關節轉角,因而是此鋼絲繩驅動系統忽略了鋼絲繩的力量以及與滑輪和其他部件的摩擦力。Cable 的鋼絲繩建模過程如下:
(1)建立錨固Anchor,主要是設置鋼絲繩的錨固位置,鋼絲繩錨接的部件以及錨固的位置和數量。
(2)創建滑輪Pulley:此功能是用來創建滑輪布局的和接觸參數的,其中滑輪的布局包括滑輪的安裝位置、滑輪的旋轉方向、滑輪的直徑以及滑輪的屬性;接觸參數主要包括連接類型和連接部件,連接類型是滑輪和連接部件連接的運動副類型,為旋轉副。本鋼絲繩驅動系統包括4 個滑輪,分別位于各關節旋轉中心處。
(3)鋼絲繩創建:此模塊用于設置鋼絲繩驅動系統中鋼絲繩的錨接位置和纏繞滑輪的順序,以及設置鋼絲繩本身所具有的參數,以及仿真的方法和求解器。其錨接位置和纏繞順序,如圖4 所示。在仿真過程中鋼絲繩要始終與滑輪處于不脫離的狀態,采用簡化仿真的方法,使用自動求解器進行求解。
4.3 載荷施加
接觸力的施加:在肢節與桿件之間施加接觸力,就可以仿真出每個肢節與桿件之間的接觸力變化。關節的扭轉力:在兩個關節之間添加扭轉彈簧,就是替代欠驅動手爪結構中回復彈簧的作用,不僅能夠仿真出關節轉角與扭轉力的關系,并且可以測的關節轉角隨仿真時間的變化關系。驅動力:驅動力是施加在驅動塊上的力,正是由于驅動力的作用使鋼絲繩收縮,最終驅動手爪的完成抱持。并且此驅動力采用STEP(time,0,0,1,270)函數進行控制。
4.4 仿真結果分析
在完成模型的建立,各構件約束關系的添加,鋼絲繩驅動系統的建立,載荷的施加以后,就可以進行整個仿真過程了。通過仿真可以得到手爪的運動過程,如圖5 所示。手爪肢節的接觸力,關節轉角隨時間的變化關系,如圖6、圖7 所示。
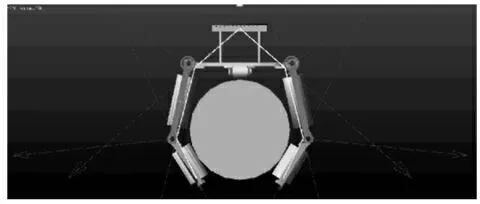
圖5 ADAMS 仿真運動過程Fig.5 ADAMS Simulation of Motion Process
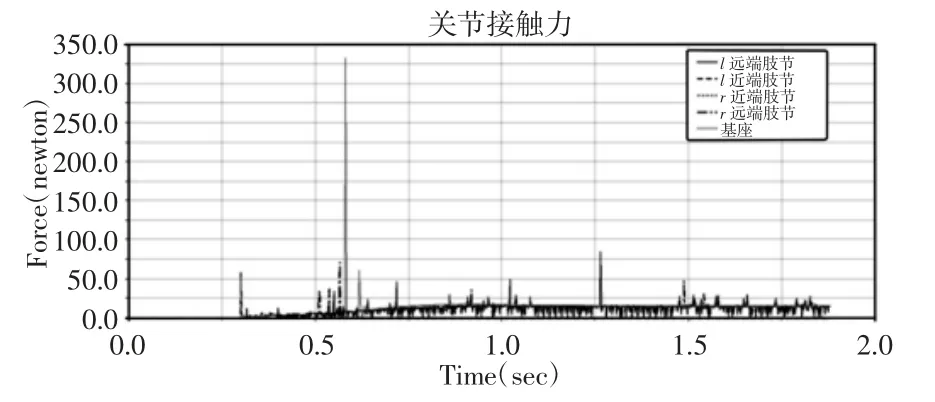
圖6 肢節與桿件接觸力變化關系Fig.6 The Change of Contact Force between Joints and Bars
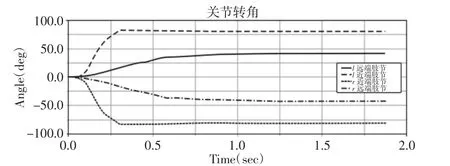
圖7 關節轉角變化關系Fig.7 Change of Joint Rotation Angle
從仿真的結果可以得出,繩驅式欠驅動手爪在驅動力的作用下可以完成預期的抱持動作,并且能夠達到抱持穩定狀態。并且在抱持穩定狀態下,肢節與桿件之間的接觸力和關節轉角也達到了恒定。該仿真驗證了欠驅動手爪作為攀爬機器人抱持機構的可行性,并且能夠提供攀爬機器人攀爬時所需要的正壓力,從而驗證了繩驅式欠驅動手爪模型在結構設計原理的正確性。
4.5 仿真方法實驗驗證
在欠驅動抱持機構關節處安裝電位計,對其關節轉角進行實時測試。在每個輔助輪支架的壓塊下安裝有金屬應變片,對抱持過程的接觸力進行測量。通過抱持實驗可以得出抱持機構在抱持過程中各個肢節的運動與仿真過程一致,從而驗證仿真方法的正確性,如圖8 所示。

圖8 抱持機構抱持實驗Fig.8 Holding Mechanism Experiment
5 結論
(1)利用繩驅式欠驅動原理,為攀爬機器人設計了一種兩指兩肢節的欠驅動抱持機構,具有結構簡單,自適應性強的特點。
(2)利用虛功原理,得到抱持穩定時各肢節和桿件之間接觸力關系,建立欠驅動抱持機構的靜力學模型。為研究欠驅動抱持機構和攀爬機器人提供理論支持。
(3)利用ADAMS/Cable 插件對繩驅式欠驅動抱持機構進行運動學和動力學仿真,為繩驅式欠驅動手爪提供了一種新的仿真方法。
