自動駕駛車輛行進參數有限時間估計方法研究
2021-06-05 07:02:52郭其濤
機械設計與制造 2021年5期
郭其濤
(1.長春汽車工業高等專科學校,吉林 長春 130013;2.第一汽車集團公司教育培訓中心,吉林 長春 130013)
1 引言
自動駕駛車輛在保證車輛行駛安全性的前提下,能夠大幅減少人為操控失誤、提高現有道路的車輛通行效率[1],并在一定程度上降低運送單位質量貨物的能源消耗,減少污染物排放。為了確保行車安全,要求對車速的控制要非常精準,而車速控制不僅與自主車本身的參數相關,還與道路的起伏情況密切相關,因此準確獲取這些參數是車輛在復雜環境中自適應路面附著變化并進行安全行駛的關鍵[2]。現有環境感知方案中,單一傳感器很難應對復雜多變的行駛環境,因此無人車系統大多通過將激光雷達與其他多種不同類型的傳感器數據融合來進行復雜場景的處理和判斷,以實現準確高效地環境感知[6],但其傳感器設備花費不菲,使得成本問題成為了制約自動駕駛技術普及的瓶頸。因此,在一定硬件基礎上,結合參數估計實現自動駕駛車輛高效環境感知,是有效、可行的途徑之一。
車輛自身的參數估計對自動駕駛控制系統至關重要。文獻[7]利用龍伯格觀測器設計了系統擴張狀態觀測器,對汽車發動機的轉速等參數進行了有效估計,從而實現發動機轉速的有效控制。針對自動駕駛車輛環境感知問題,文獻[5]采用最小二乘方法對車道曲率參數進行了數值估計。文獻[3]采用帶遺忘因子遞推最小二乘法對自動駕駛汽車行駛過程中的附著系數和滑動率以及相關運動學參數進行了在線估計。文獻[4]分別采用擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)和雙UKF 方法對智能車輛的狀態信息進行了估計。上述方法雖取得了一定成效,但仍有值得商榷之處。傳統觀測器方法通常要求輸入信號滿足持續激勵條件,以保證待估計參數收斂,且存在著時間延遲的問題。而最小二乘方法、神經網絡方法以及卡爾曼濾波算法對于參數初始值的選取則異常敏感,初始參數選擇不當致使模型產生超調甚至失穩的問題,需要復雜的優化算法篩選初始值,不便于在線使用。針對上述問題,提出了一種有限時間收斂的自動駕駛車輛自適應參數估計方法。所提方法采用一階濾波實現系統信號降噪,利用并行學習技術放寬了自適應觀測器收斂的持續激勵條件,并基于有限時間收斂理論設計了汽車質量以及路況信息的參數更新律,以期獲得更高的收斂速度與穩定性。
2 行駛車輛力學分析
對于自動駕駛車輛,對其主要受力情況進行動力學分析,如圖1 所示。
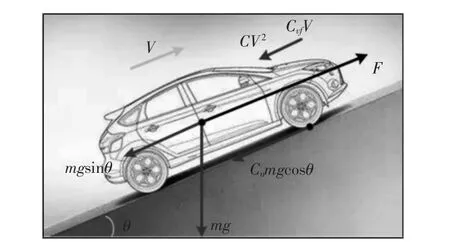
圖1 行駛車輛的受力分析圖Fig.1 Force Analysis Diagram of Moving Vehicle
由圖1 分析可知,車輛在行駛過程中主要受到自身重力、動力裝置牽引力、輪胎與地面接觸產生的抓地力以及快速行駛所帶來的風阻力。根據牛頓第二定律,其縱向運動方程如下[7-8]:
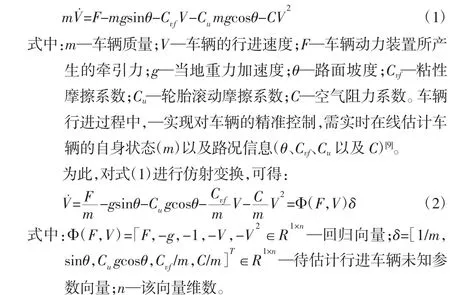
針對上述自動駕駛車輛的未知參數估計問題,將行進參數有限時間估計方法詳述如下。
3 行進參數有限時間估計方法
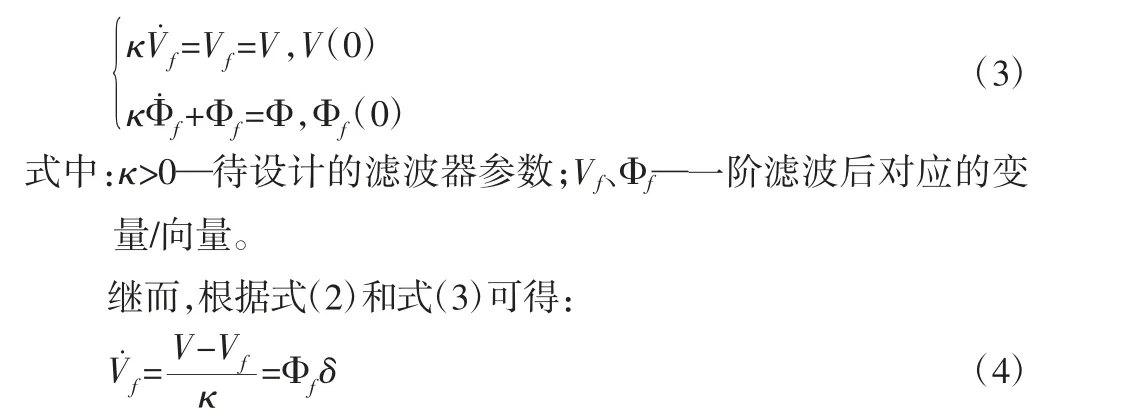
3.1 低通濾波
采用低通濾波思想,引入下列車輛狀態變量及回歸向量的一階濾波變量:
3.2 直接參數估計誤差構建
根據上述推導,定義以下輔助回歸矩陣Wcl(t)和輔助向量Fcl(t):
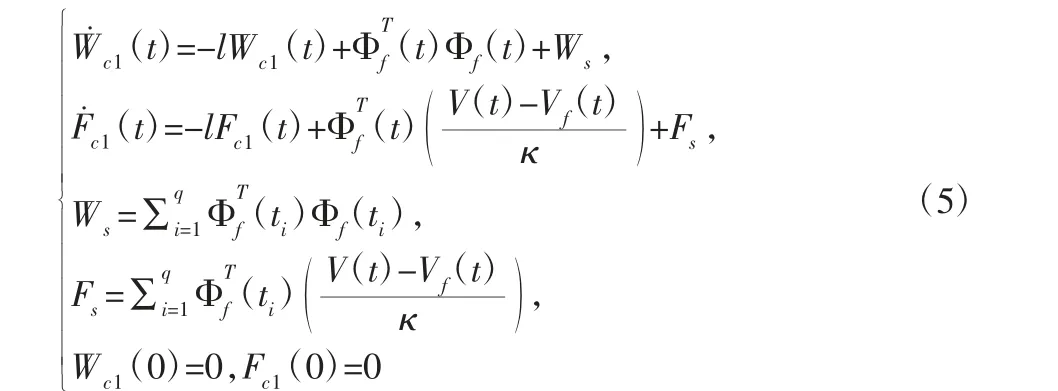
式中:l>0—待設計參數,表示參數的衰減速率;Wcl(t)、Fcl(t)—回歸矩陣和向量表達式,其中包含了當前時刻的數據和歷史數據,即并行學習[10-11]。Ws和Fs為歷史數據所構建的對應回歸矩陣/向量。由式(5)可知:

式中:參數估計誤差向量定義為δ~=δ-δ^。
3.3 參數估計律設計
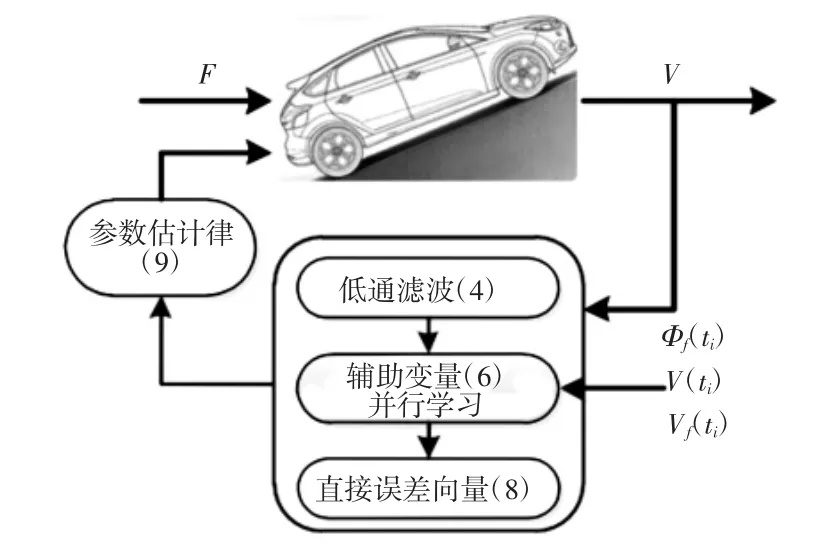
圖2 所設計方法概覽Fig.2 Full Scope of the Proposed Method
根據梯度下降規則,可設計參數估計律如下:

其中,Γ=Γ>0∈R—增益矩陣,表征參數估計的更新速率。對比式(7)和式(8)可見,上述參數估計律直接由參數估計誤差直接驅動故障估計過程,這與常規狀態跟蹤誤差驅動的間接方式截然不同,突出了所設計方法的優勢所在。為便于讀者對所設計方法具有整體直觀地理解,特給出這里方法的框架圖,如圖2 所示。
4 穩定性分析
為從理論上給出這里方法的收斂性證明,利用李雅普諾夫穩定性理論分析如下。
定理1 對于動態行進車輛(1),若滿足條件1,則所設計參數估計律(8)能夠保證未知參數誤差向量δ~的全局有限時間收斂。

通過并行學習技術放寬了參數估計的持續激勵條件,無需向系統注入激勵信號。簡化了系統設計途徑,節省了系統運行成本,優化了參數估計效果,這將在仿真部分得以驗證。
5 仿真分析
為驗證所提方法的有效性,采用Matlab/Simulink 平臺在PC機上進行仿真實驗,引入某型號車輛的參數,如表1 所示。參數更新律(9)的相關設計值給定為:Γ=10I5,I5為5 階單位矩陣,l=1,κ=0.001,q=10。為說明這里方法在非持續激勵條件下的仿真效果,車輛動力F 選取為階躍信號(階躍信號為一種非持續激勵信號)[13]。這里方法對車輛本身參數的仿真結果,如圖3 所示。

表1 車輛行駛參數Tab.1 Vehicle Driving Parameters
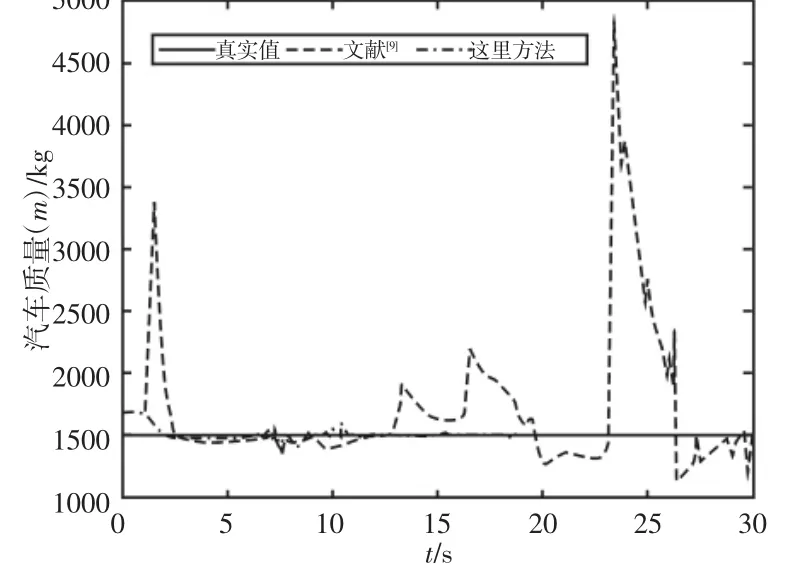
圖3 行進車輛質量估計Fig.3 Estimation of Mass of Moving Vehicle
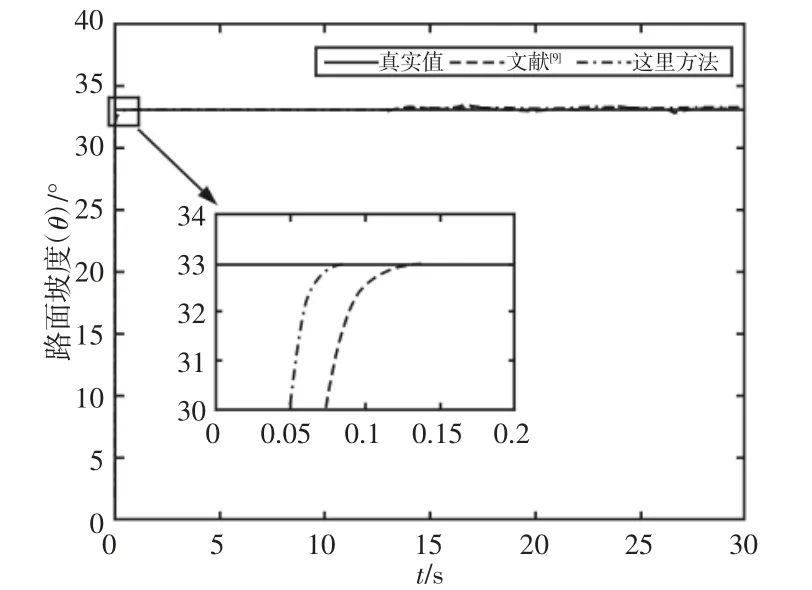
圖4 路面坡度估計Fig.4 Estimation of Road Slope
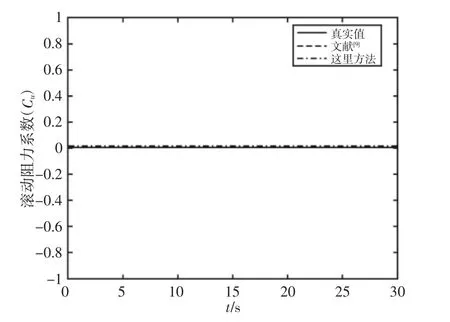
圖5 輪胎滾動阻力系數估計Fig.5 Estimation of Rolling Friction Coefficient
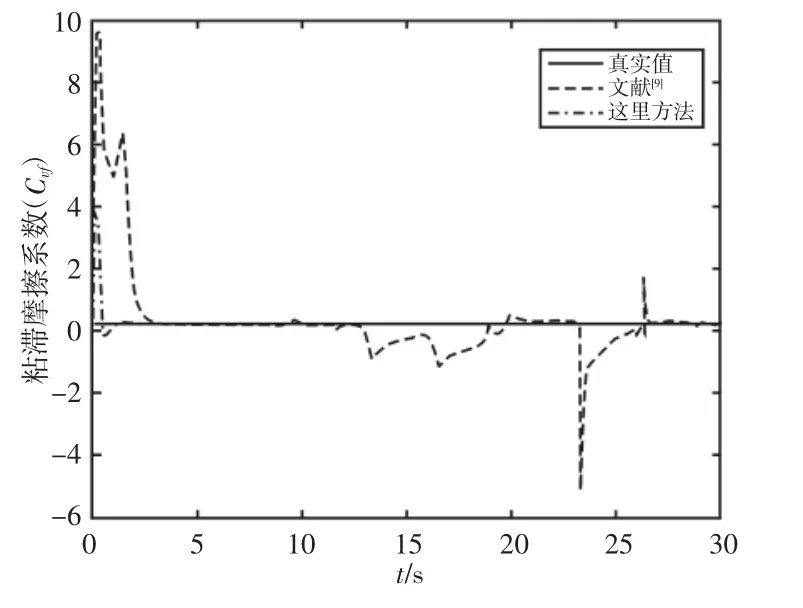
圖6 粘滯摩擦系數估計Fig.6 Estimation of Viscous Friction Coefficient
觀察圖3 可知,所提方法能夠實現行進車輛質量的快速、高效估計。對比文獻[9]的方法,這里方法在參數收斂之后,仍能夠保證估計結果的持續一致收斂,估計效果穩定性好。該收斂效果在后續仿真結果圖中也得到了相應體現。對于路況信息的估計結果,如圖4~圖7 所示。
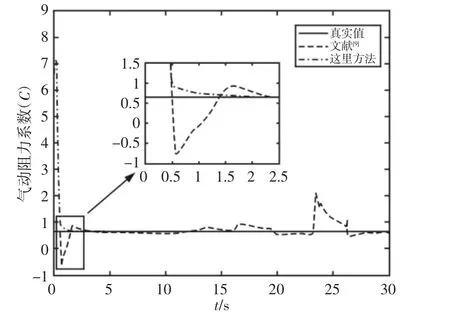
圖7 氣動阻力系數估計Fig.7 Estimation of Air Drag Coefficient
由圖4 可知,這里方法能夠快速、準確地估計路面坡度,收斂時間<0.1s,充分體現了有限時間估計算法的優勢所在。對比現有方法,這里方法有效提升了快速性,其原因將在后續仿真結果中進行詳細解釋。
由于車輛抓地力來自于強勁的動力總成和輪胎的良好維護,故輪胎滾動阻力系數相對較小。觀察圖5 可知,這里方法能夠對其實現有效估計。
由于空氣粘滯對行進車輛的動力學特性影響較大,故對其進行在線估計尤為重要。從圖6 可以看出,在估計初期,曲線存在較大振蕩,但很快就實現了有效收斂。特別地,若將存在參數突變的路況估計結果反饋給自動駕駛系統,將會帶來不可估量的災難。對比現有方法,這里方法在參數收斂之后,不存在未知突變,表現較佳,更為穩定、可靠。
空氣對車輛行進帶來的不僅是空氣粘滯效應,更重要的是形成了氣動阻力,這也是車輛(或跑車)多設計成流線型或近流線型的原因所在。觀察圖7 可知,氣動阻力系數C 的估計結果在初期也存在與Cvf估計類似的大幅振蕩情形,但從局部放大圖可以看出,所提方法能夠在一次振蕩后快速收斂,收斂效果快又穩,進一步驗證了其優越性能。
根據參數更新律的穩定性證明式(12)可知,系統激勵水平σ 決定了參數更新的收斂速率,激勵水平越高,則參數收斂越快。由于并行學習技術加持,這里方法能夠在整個估計過程中始終保持其激勵水平,從而確保了參數收斂的快速、準確、可靠,如圖8所示。而對比現有方法,由于系統在初始激勵之后不再持續激勵,其激勵水平呈現持續下滑趨勢,這也是其在估計后期無法保證參數更新持續穩定的根本原因。
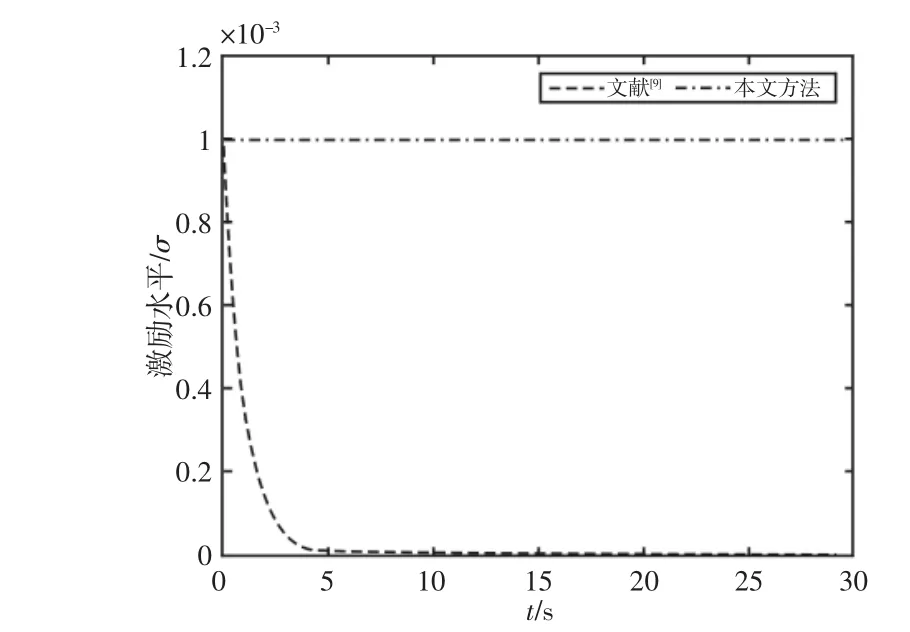
圖8 激勵水平Fig.8 Excitation Level
進一步觀察圖9 可知,這里方法在歷史數據篩選方面也能夠做到快速、穩定。在初期激勵之后,就形成了穩定的回歸向量歷史數據矩陣集合,保證了條件1 成立,確保了參數更新的持續激勵。
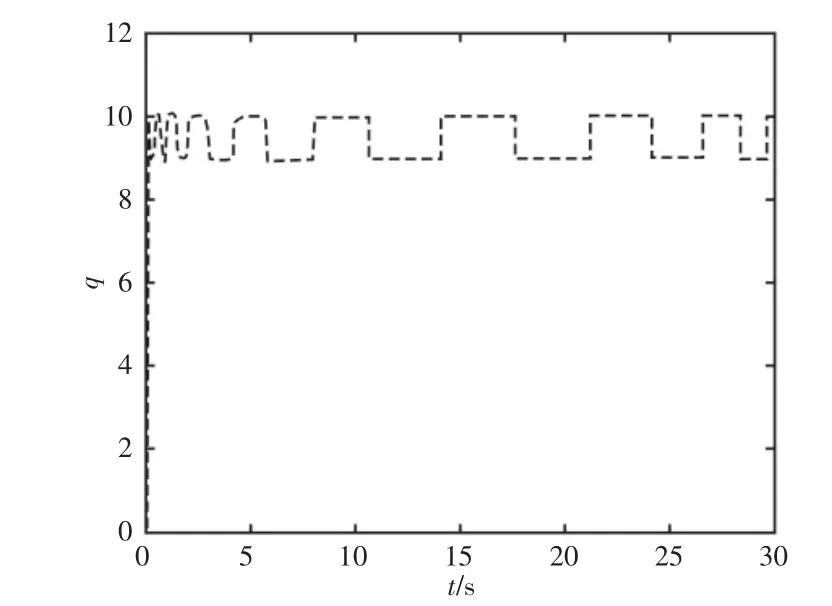
圖9 存儲數據更新次數Fig.9 Iteration Time of Stored Data
6 結論
針對自動駕駛車輛行駛過程中車輛和路況信息估計存在問題,結合并行學習技術,提出了一種有限時間自適應參數估計方法,并通過仿真驗證得到以下結論:
(1)通過構建辨識參數的仿射參數模型,推導了參數估計誤差向量,并基于有限時間收斂理論設計自適應參數的更新律。
(2)研究結果表明,所提方法能夠對行駛車輛和路況信息進行及時有效地估計,且收斂速度快,更加穩定、可靠。同時,與現有方法相比,本方法放寬了持續激勵條件,更適合車輛行駛過程中參數的實時變化,有利于系統長時間安全可靠地運行。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
