基于電控空氣懸架的車輛ACC系統(tǒng)姿態(tài)控制研究
2021-06-04 07:50:56徐柱曹占勇
汽車實用技術 2021年10期
關鍵詞:系統(tǒng)
徐柱,曹占勇
(1.貴陽職業(yè)技術學院,貴州 貴陽 550081;2.法國魯昂國立應用科學學院,法國 里昂 76000)
1 引言
隨著先進駕駛輔助技術的發(fā)展,ACC系統(tǒng)逐漸成熟并被廣泛應用在普通家用車[1]。此外,空氣懸架在中高級車型中配備來提高駕乘舒適性[2]。然而 ACC系統(tǒng)一旦設計完成裝配,其工作時的車輛縱向加速度只能算法所決定,當汽車急加速或者制動時,為保持跟車性,ACC系統(tǒng)會以較大的加速度跟隨前車。由于瞬間產生較大的縱向載荷轉移,車輛將出現(xiàn)“低頭”或“抬頭”現(xiàn)象,影響駕乘舒適性以及車輛操縱穩(wěn)定性。而電控空氣懸架可通過調節(jié)空氣彈簧內部氣體壓力實現(xiàn)懸架力的主動調節(jié)。因此,開展 ACC系統(tǒng)巡航工況下電控空氣懸架實現(xiàn)車身姿態(tài)的主動控制,可提高車輛平順性,具有廣泛應用前景。
因此,本文分析并建立了與實際相符的電控空氣懸架的機理模型,通過設計滑模控制器決策所需附加俯仰力矩,并對力矩進行分配,同時采用邏輯控制策略對電磁閥開度進行調節(jié)。通過在ACC巡航工況急加和制動工況進行仿真分析,對模型及算法有效性進行了驗證。
2 電控空氣懸架系統(tǒng)及整車建模
為實現(xiàn)電控空氣懸架系統(tǒng)車身姿態(tài)的控制,需建立空氣彈簧及其充放氣過程的機理模型和整車動力學模型。通過控制開關電磁閥的開閉來調節(jié)充入和放出空氣彈簧的空氣質量,使得空氣彈簧內的氣壓和體積發(fā)生改變,進而調節(jié)空氣懸架提供的附加力,實現(xiàn)車身姿態(tài)的穩(wěn)態(tài)調節(jié)控制。
2.1 電控空氣懸架系統(tǒng)機理模型
電控空氣懸架系統(tǒng)的簡化結構示意圖如圖1所示,該系統(tǒng)主要包括儲氣罐、空氣壓縮機、管路、電磁閥組、電控單元、減振器和空氣彈簧組成[3]。
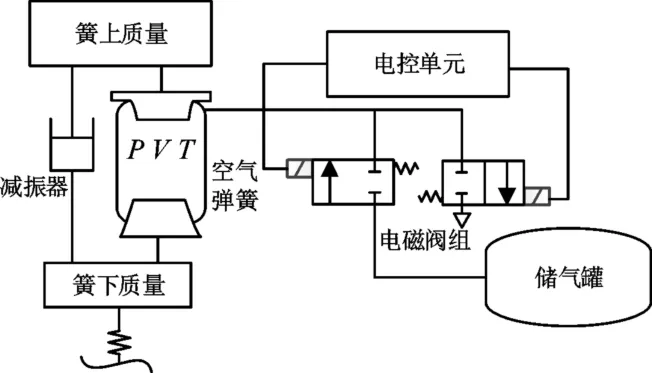
圖1 電控空氣懸架系統(tǒng)
空氣彈簧工作過程中,其內部氣體處于多變狀態(tài),由理想氣體的狀態(tài)方程有:

式中,P0為靜態(tài)狀態(tài)時空氣彈簧內部的絕對壓力,V0為靜止狀態(tài)時空氣彈簧的有效容積,Pe為任意時刻空氣彈簧內部的相對壓力,Ve為任意時刻空氣彈簧的有效容積,κ為氣體多變指數(shù),通常取為1.33,Pa為標準大氣壓。
空氣彈簧運動過程中,其有效承載面積及容積均為變量,對于膜式空氣彈簧,近似有如下關系:

式中,A0為靜止時空氣彈簧的有效承載面積,Ae為任意時刻空氣彈簧的有效承載面積,zs和zu分別為簧上和簧下質量位移,α為空氣彈簧有效容積變化率,β為空氣彈簧有效承載面積變化率。由力和壓強之間的關系可得到空氣彈簧產生的主動力Fas為:

空氣彈簧的充放氣屬于變質量充放氣過程,由熱力學第一定律推導得到重過期過程的機理模型為:

式中qin和qout分別為流入和流出空氣彈簧的空氣流量。管路在充放氣時同樣可視作變質量充放氣系統(tǒng),但其體積在充放氣過程中保持不變,由式(4)可推導出管路的動態(tài)機理模型為:

式中,Pp為管路內氣體壓力,p為管路體積,qin_p和qout_p分別為流入和流出管道的氣體質量流量。氣體流經開關電磁閥所形成的氣體質量流量主要受到上下游氣壓及其機構參數(shù)的影響,其機理模型可抽象為一個等效節(jié)流小孔來計算:
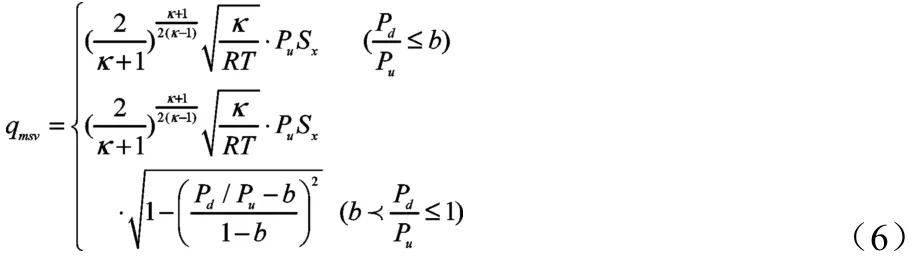
式中,Sx—為電磁閥等效面積,b為臨界壓力比,其值通常為0.528,Pu為電磁閥上游氣壓,Pd為電磁閥下游氣壓。
2.2 整車動力學模型
為研究巡航狀態(tài)下車輛運動規(guī)律,加入電控空氣懸架系統(tǒng)建立了整車7自由度動力學模型,如圖2所示,包括四個簧下質量的垂向運動,以及簧載車身的垂向、側向以及俯仰運動。
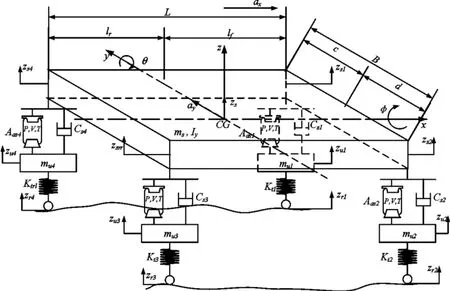
圖2 整車動力學模型示意圖
由牛頓第二定理可得車身簧載質量的運動為:
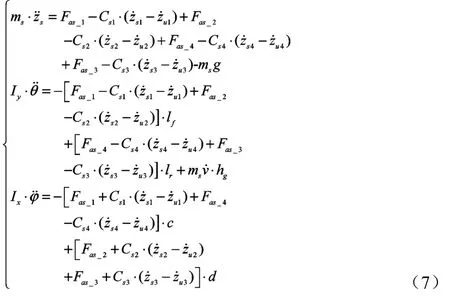
式中,zs為車身質心處的垂向位移,θ和φ分別為車身俯仰角和車身側傾角,ms、Ix、Iy分別為車身質量、車身俯仰轉動慣量和車身側傾轉動慣量,F(xiàn)as_i(i=1,2,3,4)為四個空氣彈簧的垂向作用力,Cs_i(i=1,2,3,4)為四個減振器的阻尼系數(shù),zs_i(i=1,2,3,4)為車身四角處的垂向位移,zu_i(i=1,2,3,4)為四角處非簧載質量的垂向位移,lf和lr為質心到前后軸的水平距離,c、d分別為左右輪距值的一半。同理可得簧下質量的運動為:
式中,Kt(i=1,2,3,4)為四個車輪的剛度系數(shù),由集合關系近似有簧載質量垂向位移和簧下質量垂向位移關系:

2.3 道路激勵模型
車輛巡航過程中車身俯仰姿態(tài)不僅與縱向加速時載荷轉移有關,還與道路的輸入激勵有關[4]。前輪所受路面激勵為:

式中,u0為車輛縱向行駛車速,nc為路面空間下截止頻率,n0為參考空間頻率,Gq(n0):參考空間頻率 n0下的路面功率譜密度值,W1(t)為白噪聲。以式(10)為前軸左右輪輸入,則后軸車輪的輸入與其相差一個時間延遲,可定義為:

3 姿態(tài)控制及控制分配策略設計
ACC系統(tǒng)工作時,車輛根據(jù)雷達系統(tǒng)所采集的與前方車輛的間距以及速度信息,通過預設算法決策出所需縱向加速度。當前車急加速或制動時引起 ACC車輛產生同步跟隨的加速度信號,導致車姿俯仰失衡。由分析知,可通過設計控制算法計算得出所需附加俯仰力矩,在前后軸進行力的分配,調節(jié)空氣彈簧內部空氣質量流量,進而改變空氣彈簧內部有效壓力,使得車輛空氣懸架系統(tǒng)產生相應的抗俯仰力矩,實現(xiàn)穩(wěn)定的車身姿態(tài)。
3.1 滑模姿態(tài)力矩控制
滑模控制屬于一種變結構控制方法,被廣泛應用于車輛的各種控制系統(tǒng),如主動懸架控制、主動轉向控制以及差動制動控制等[5]。
根據(jù)公式(7)的車輛模型,采用無抖動滑模控制,利用電控空氣懸架系統(tǒng)作為車身姿態(tài)的執(zhí)行設備。系統(tǒng)輸入為附加俯仰力矩Map,輸出為車輛俯仰角θ。因此,滑模面可定義為:
同時選擇滑模的比例趨近率作為趨近條件,即:

聯(lián)立式(13)和(14)可得姿態(tài)控制的附加俯仰力矩為:

為消除抖振,利用飽和函數(shù)替換原來的符號函數(shù)sat(s/b)替換原有的符號函數(shù)sgn(s),即:

式中,系數(shù)b表示滑模面的邊界厚度。
3.2 懸架垂向力分配及電磁閥邏輯控制
由于車輛懸架系統(tǒng)不能直接施加附加俯仰力矩,所以需對力矩在前后軸的附加垂向力進行分配,并通過控制前后軸電磁閥PWM波信號來實現(xiàn)附加俯仰力矩的跟隨作用。根據(jù)前后軸載荷分配可得前后軸懸架附加力為:
式中,l為車輛軸距,Pe_i和Pe_j分別為前后軸左右空氣彈簧內部有效壓力,Aas_i和Aas_j分別為前后軸左右空氣彈簧的有效面積。由充放氣熱力學過程可得所需理想的沖入或放出空氣質量為:

式中,P0i和 P0j分別為前后軸左右空氣彈簧初始壓力,V0i和V0j分別為前后軸左右空氣彈簧的初始體積。由于附加俯仰力矩是一個時變變量,使得對電磁閥組PWM波的控制也時瞬態(tài)的。因此,由實時電磁閥所能提供的空氣質量流量qsv和理想空氣質量mdes可得電磁閥的占空比信號為:

因此,通過占空比信號在一個周期內的開關信號控制電磁閥的動作,最終流入空氣彈簧的有效空氣質量為:

4 ACC工況仿真及分析
為了驗證電控空氣懸架模型及其控制算法的有效性,模擬車輛在 ACC工況下遇到前車急加或急減速行駛,本車為了保持良好的跟車性以同等加速度跟隨行駛工況下進行仿真。車輛及電控空氣懸架仿真參數(shù)見表1。

表1 車輛主要參數(shù)
如圖3所示,自車從遠處接近前車,并最終緊急制動停車。ACC車輛以80km/h的初始速度在B級路面巡航行駛,先加速從遠處接近前車,之后緊急制動至減速度為-5.7m/s2,并最終停車。
由圖4所示,緊急制動工況下,電控空氣懸架由于系統(tǒng)時滯和進氣量較少,初段作用效果不是很明顯,但之后系統(tǒng)能保證車身姿態(tài)俯仰角在期望值0附近波動,且幅值較空氣懸架有所降低。由圖5和6可知,緊急制動時車身的垂向和俯仰方向的振動均得到有效抑制,顯著改善了車輛運行時的平順性和舒適性。由表2進一步分析知,垂向和俯仰方向的加速度均方值分別降低了14.89%和17.60%。
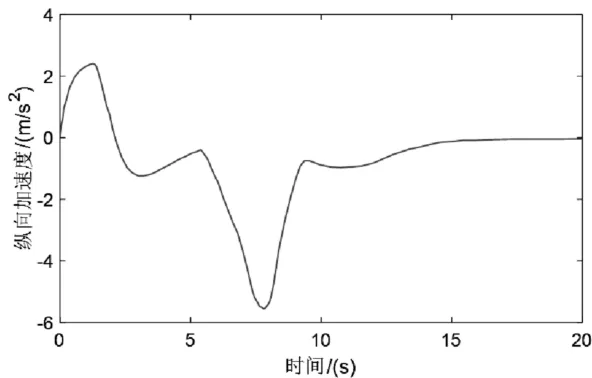
圖3 ACC系統(tǒng)制動工況加速度
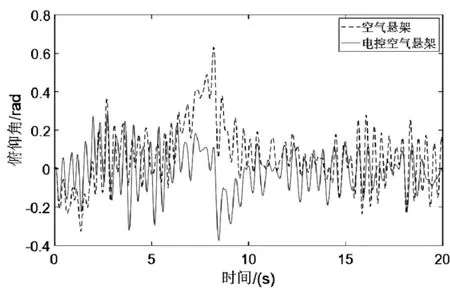
圖4 車身俯仰角
如圖7所示為車輛前軸懸架PWM波控制信號,緊急制動時,通過前軸充氣,后軸放氣來實現(xiàn)滑模控制所需附加俯仰力矩的跟隨作用。

表2 制動工況車身姿態(tài)指標加速度均方值
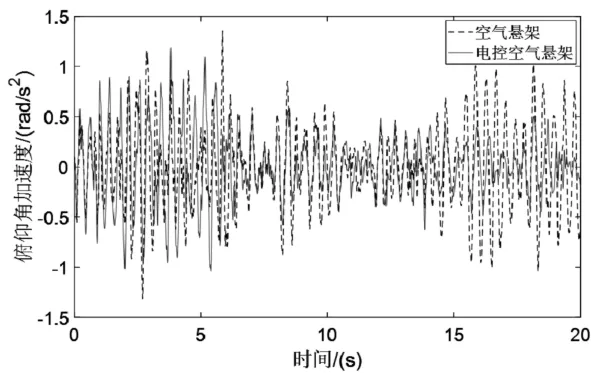
圖5 俯仰角加速度
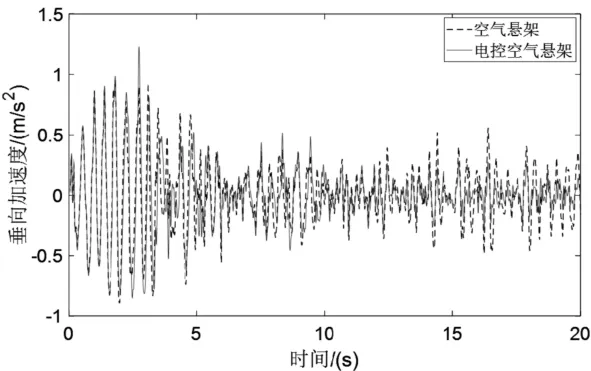
圖6 車身垂向加速度
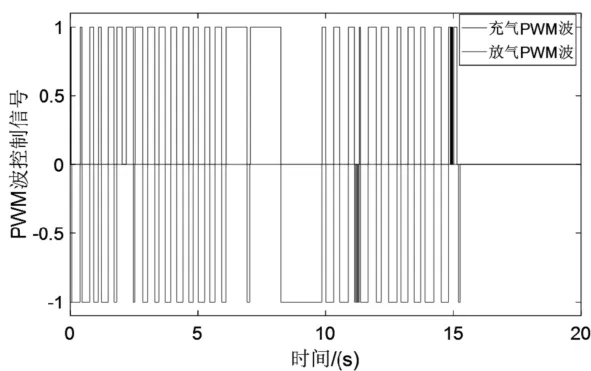
圖7 前軸電磁閥PWM波脈沖信號
5 結論
本文應用滑模控制理論和開關電磁閥邏輯控制策略設計了整車電控空氣懸架在 ACC系統(tǒng)巡航工況下的車身俯仰姿態(tài)控制器,通過電磁閥充放氣實現(xiàn)期望附加俯仰力矩的跟隨作用。仿真結果表明,提出的基于電控空氣懸架的車輛在ACC系統(tǒng)巡航急加速和制動工況下均能夠有效地改善車輛俯仰姿態(tài),車姿加速度均方值優(yōu)化達到10%以上,同時將車身振動抑制在合適范圍內。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
