基于卷積神經網絡的傾角域彈性波逆時偏移噪聲壓制方法
2021-06-01 09:00:46馮興強王曉毅蘆永明
石油物探 2021年3期
關鍵詞:方法
張 浩,馮興強,付 昌,孫 輝,王曉毅,蘆永明
(1.中國地質科學院地質力學研究所,北京100081;2.自然資源部古地磁與古構造重建重點實驗室,北京100081;3.中國石油集團東方地球物理公司遼河物探處,遼寧盤錦124010;4.中國科學院地質與地球物理研究所,北京100029;5.南方科技大學地球與空間科學系,廣東深圳518055)
隨著油氣地震勘探技術的發展,基于雙程波方程的逆時偏移技術(RTM)成為對日益復雜的地質構造進行準確成像的有力工具[1-6]。近年來,隨著多分量采集技術和計算能力的進步,疊前彈性逆時偏移(ERTM)越來越受到重視。與常規聲波成像相比,ERTM在儲層監測、油氣檢測和巖性識別方面具有很大優勢,是近年來地震成像的研究熱點[7-11]。
然而,由于彈性波場中P波和S波在垂直和水平方向的不解耦性和波場分離的不徹底性導致成像過程中往往伴隨著串擾噪聲等非物理噪聲,使得成像分辨率顯著降低[12-15]。近年來,為了減輕這種噪聲的影響,提高ERTM的成像質量,許多學者討論了在傾角域壓制噪聲的應用。如KLOKOV等[16]提出了在傾角域利用反射波和繞射波在形態上的差異將兩者進行分離;XU等[17]直接在傾角域將不平的部分從道集中去掉,在菲涅爾帶內疊加完成反射波成像;ZHANG等[18]在各向異性疊前時間偏移中輸出傾角道集,并在其上解析地近似估計菲涅爾帶,完成最優疊加,提高成像的信噪比。以上這些應用都是在Kirchhoff型積分偏移中完成的,在彈性波逆時偏移(ERTM)領域還沒有相關研究。
深度學習是一種人工智能(AI)技術,它可以讓計算機像人類一樣從經驗中學習,并模擬人類處理數據的方式[19-21]。近年來,深度學習的應用也成為地震學研究的一個活躍領域。在勘探地球物理領域中,學者們提出了一些基于深度神經網絡的方法,如層析成像、數據插值、鹽丘邊界識別等[22-24]。深度學習方法的一個顯著特點在于能發現隱藏在高維數據中的特征,并且具有一定泛化能力,能夠讓機器自動大批量地完成很多復雜的工作[25]。前人研究了通過在傾角域生成偏移道集,并利用手動拾取傾角范圍來控制成像疊加的方式壓制偏移過程中的噪聲,但這類方法主要是通過手動拾取來實現這一過程[26-27]。本文介紹了在ERTM生成的傾角道集上利用一種深度學習方法——卷積神經網絡(CNN)[28-30]實現自動拾取該傾角疊加范圍,從而實現壓制偏移噪聲的方法,即,基于CNN的傾角域彈性波逆時偏移噪聲壓制方法,可以節約大規模三維成像的人工拾取工作量。最后給出數值算例,驗證了該方法的可行性和實用性。
1 技術方法
本文方法對彈性波矢量逆時偏移成像結果進行噪聲壓制的思路簡要概括為:在具備準確的速度模型等參數模型前提下,采用彈性波逆時偏移方法對彈性波數據進行成像,這一過程中關鍵技術是利用波印廷矢量進行波場分離并計算角度,實現彈性波逆時偏移生成多套以地層傾角為索引的成像道集(矢量道集)。在傾角道集上,可以清楚觀察到對成像貢獻最大的有效部分和噪聲部分,各自按照傾角范圍分布在道集上,所以可以通過在傾角道集上拾取適當的傾角范圍,即疊加孔徑,然后在疊加孔徑內對有效信號進行疊加成像,從而實現噪聲壓制。由于成像點處構造情況變化劇烈,單一參數無法滿足去噪要求,因此逐點進行傾角范圍手動拾取的工作量非常大。基于此,本文應用CNN算法,將部分道集手動拾取的疊加孔徑函數作為目標輸出,即標簽數據,使用CNN來實現自動預測,從而實現噪聲壓制的同時節約大量手動拾取的工作量,該方法適用于大規模的道集傾角范圍拾取。
1.1 利用波印廷矢量生成傾角道集
二維彈性波方程[10-12]如下:
(1)
式中:i,j,k=1,2;ρ表示密度;vi表示x方向上的質點速度;vj表示y方向上的質點速度;τij表示應力張量;δij表示Delta函數;λ,μ表示拉梅常數。我們采用了基于非結構網格的格子法求解方程(1)[29],在輸出傾角道集時,本文使用坡印廷矢量[30-31]計算傾角,波印廷矢量表示為:
si=-τijvj
(2)
式中:i和j分別表示彈性波波印廷矢量的水平和垂直分量。我們使用波印廷矢量來計算傾角(圖1)[32-33],公式如下:
β=α-γ
(3)
式中:α表示入射波與z方向的夾角;γ表示反射波與z方向之間的夾角;β表示傾角。在波場外推過程中,α可由炮點的波印廷矢量計算得到,γ可由檢波點的波印廷矢量計算得到。對于每個成像點,在每個時間步長內用公式(3)計算傾角。然后,存儲每個成像點每個時間步的傾角總和。在獲得每個炮點的傾角后,在每個成像點處疊加所有炮的結果,生成傾角道集。這一過程可表示為:
(4)
式中:I表示傾角道集;D表示傾角;Psrc,Srec分別表示炮點和檢波點的波場,nshot表示參與成像的總炮數。
1.2 基于CNN的傾角道集自動拾取
1.2.1 CNN介紹
CNN是一類特殊的人工神經網絡,區別于神經網絡的其它模型,其主要特點是卷積運算操作[19-21]。卷積是一種特殊的線性運算。卷積網絡是指那些至少在網絡中的一層中使用卷積運算替代一般的矩陣乘法的神經網絡。CNN在諸多領域特別是圖像相關任務處理的應用中表現優異,如圖像分類、圖像語義分割、圖像檢索、物體檢測等計算機視覺問題[25,28,30]。此外,隨著CNN研究的深入,如自然語言處理中的文本分類,軟件工程數據挖掘中的軟件缺陷預測等問題都在嘗試利用CNN解決,并取得了相比于傳統方法甚至其它深度網絡模型更優的預測效果[25]。
1.2.2 用于傾角道集自動拾取的網絡結構
對于彈性波逆時偏移方法生成的傾角道集,我們選擇拾取每個深度切片的傾角值作為CNN的輸入,范圍為-90°~90°,間隔為3°。因此CNN網絡的輸入層節點數為61。對于CNN的輸出,采用歸一化處理,使輸出在(0,1)范圍內變化。CNN用卷積和匯聚層代替了傳統的全連接神經網絡。此外,CNN使用共享權值和稀疏連接,因此可以顯著降低需要訓練的參數個數。
在本文研究中,傾角拾取可概括為一個一維目標檢測問題。考慮到CNN的輸出值是連續的,此處的CNN架構應該是回歸型網絡。我們遵循Alexnet架構,構建了一個8層的CNN。該CNN的網絡架構如圖2所示。對于前4層,使用卷積核大小為3的卷積層和大小為2的池化層。卷積層的通道數分別為64,128,256,512。之后,對最后4層使用全連接輸出。致密層的深度分別為64,32,16和2。注意,最后一層深度為2,輸出標準化傾角的預測值。該網絡可訓練參數為620402,輸出文件大小約7.6MB。
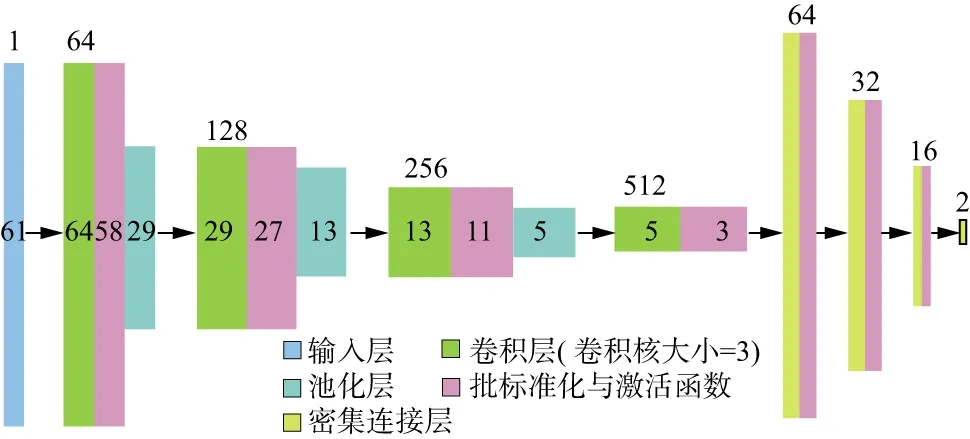
圖2 本文采用的CNN結構
1.2.3 目標函數與優化方法選擇
神經網絡可看作一種反演問題求解器,因此訓練神經網絡需要定義一個目標函數,它代表了預測值和真實期望值之間的差異[34-35]。我們認為過切和選取不足的傾角拾取結果是不同的。一方面,如果拾取的預測孔徑過窄(過切),則會削弱反射波成像的貢獻,降低最終疊加結果的成像分辨率,甚至丟失成像信息。另一方面,過大的預測孔徑(欠切)會將串擾噪聲包括進來。過窄孔徑的損失大于過寬孔徑估計的損失。因此,對過切情況進行額外處理,目標函數可表示為:
(5)
如果超參數α太大,基于CNN的方法將給出太寬泛的拾取結果。為了獲得合適的參數,需經過測試選擇適當的超參數,測試結果表明α應該小于1。在本文中,α的值是0.8。
有了目標函數之后,選擇恰當的優化方法對于成功拾取至關重要[36],我們選用了小批量梯度下降方法(MBGD)[37],通過一小批訓練樣本計算梯度。在MBGD方法里選擇的批處理量參數值為64。
2 數值算例
2.1 BGP鹽丘模型數據
利用BGP鹽丘模型數據來驗證基于CNN的傾角域成像孔徑自動拾取方法的有效性。圖3為P波速度、S波速度與密度的模型數據。使用準確的速度模型進行偏移輸出傾角道集。輸出傾角道集后,使用的帶標記的CDP傾角道集的總數為837個。將它們隨機地分成訓練集、驗證集和測試集,其大小分別為600,138和99。CDP號的范圍為70~1200,傾角變化范圍為-80°~80°,傾角間隔為1°。每個道集時間方向的采樣點數為4051個,采樣間隔為0.002s。首先將訓練集輸入到搭建好的訓練集數據上對網絡進行訓練,獲得合適的網絡權值系數和偏置,然后輸入測試集數據,輸出預測結果,將由網絡預測出的傾角域成像孔徑結果與傾角道集疊合顯示,如圖4所示。圖中,白線是手工拾取結果;綠線是自動拾取結果;黃線是自動拾取結果平滑后作為CNN自動拾取的最終結果。
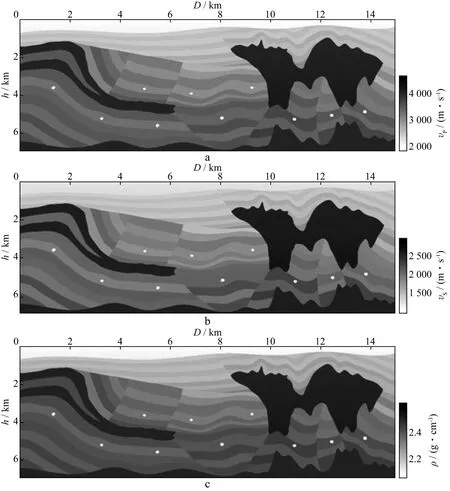
圖3 BGP鹽丘彈性波模型a P波速度; b S波速度; c 密度
由圖4可以看出,經過訓練的CNN對傾角疊加范圍(孔徑)函數具有良好的估計。首先,對于數據大部分區域,使用CNN得出的傾角疊加范圍比手動選取的傾角疊加范圍緊湊,這表明所設計的損失函數符合初衷。第二,我們認為CNN揀選和手動揀選之間的差異是由標簽的差異引起的。標注工作受人為因素影響較大。第三,相鄰時間片之間的波動較小,表明CNN預測的結果具有一定的穩定性。最后,采用CNN方法拾取傾角疊加范圍,對于大數據量特別是三維情況下,比手動拾取要節約許多時間,這是該方法最主要的優勢。實際操作中,在沒有反射波同相軸等異常情況的道集上做一個很寬松的標注或者不拾取。采用這樣的標簽數據訓練網絡后,一旦驗證集數據是沒有反射波同相軸的情況,將不做拾取或者給一個很寬的拾取結果,相當于全孔徑疊加。圖5顯示了原始未經傾角疊加范圍切除得到的成像結果,可以觀察到明顯的串擾噪聲等。圖6顯示了在經過成像孔徑切除后的PP波和PS波逆時偏移疊加成像結果,與圖5對比可以看出,有效部分得到了加強,并且消除了一些成像噪聲,而主要的同相軸沒有被損傷。
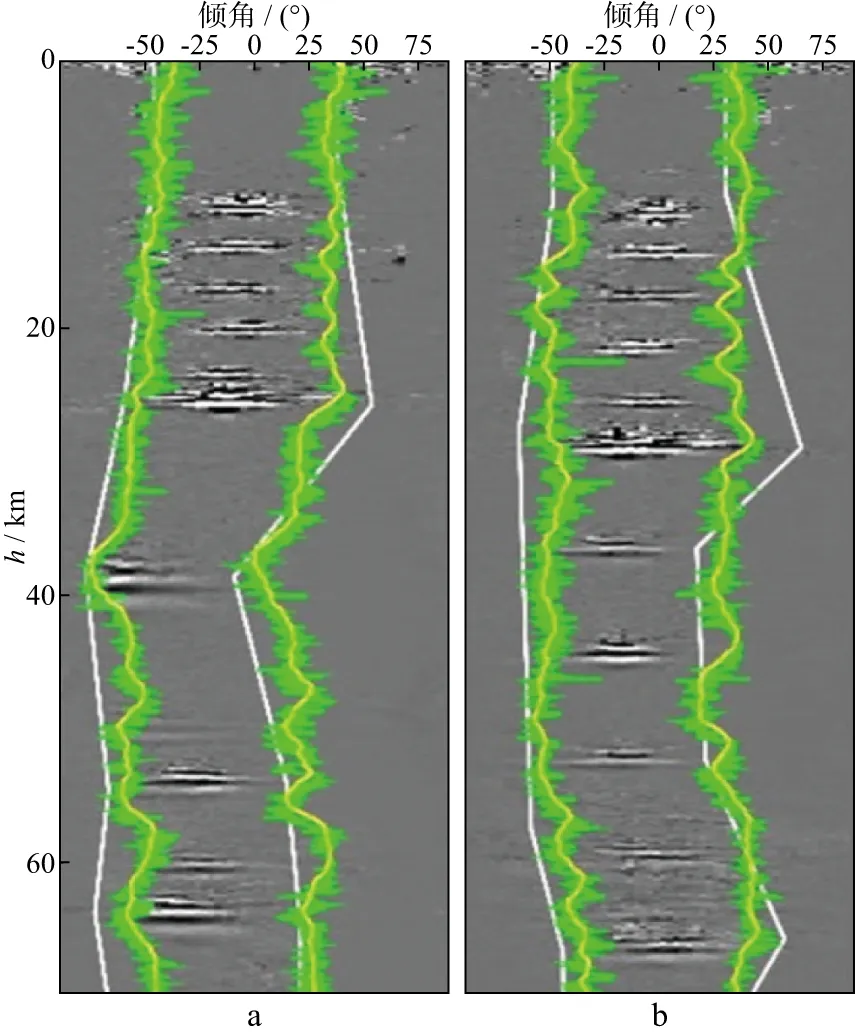
圖4 CNN在彈性波傾角道集上的疊加傾角范圍拾取結果a 傾角道集1; b 傾角道集2
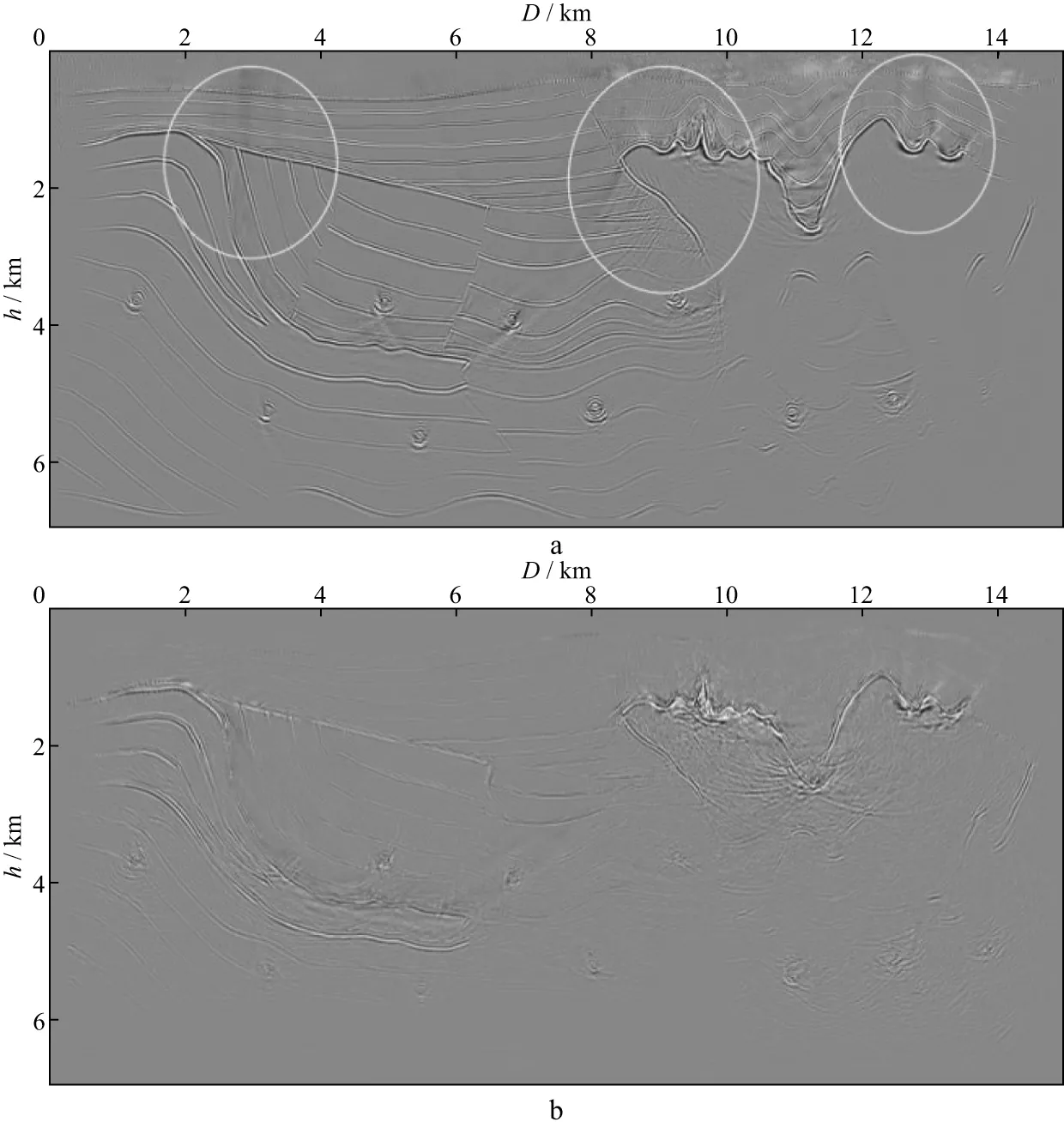
圖5 原始未經傾角疊加范圍切除得到的成像結果a PP波; b PS波

圖6 基于自動拾取傾角疊加范圍進行疊加的彈性波成像結果a PP波; b PS波
2.2 起伏地表模型數據
深度學習類方法的一個特點是在一類數據上訓練好的網絡參數,可以很快地應用到其它類似的數據上,即泛化能力。在本節中,我們使用SEG起伏地表模型來進一步檢測本文方法的泛化能力。圖7為SEG起伏地表P波速度模型。該模型在x方向上包含1668個樣點,在z方向上包含1000個樣點。網格間距:x方向為15m,z方向為10m,時間步長為0.5ms,記錄時間長度為6s,采用主頻20Hz的Ricker子波激發。沿著崎嶇的地形表面共設計277炮,震源間隔為90m。每次激發由480個檢波器以15m的間隔進行記錄。
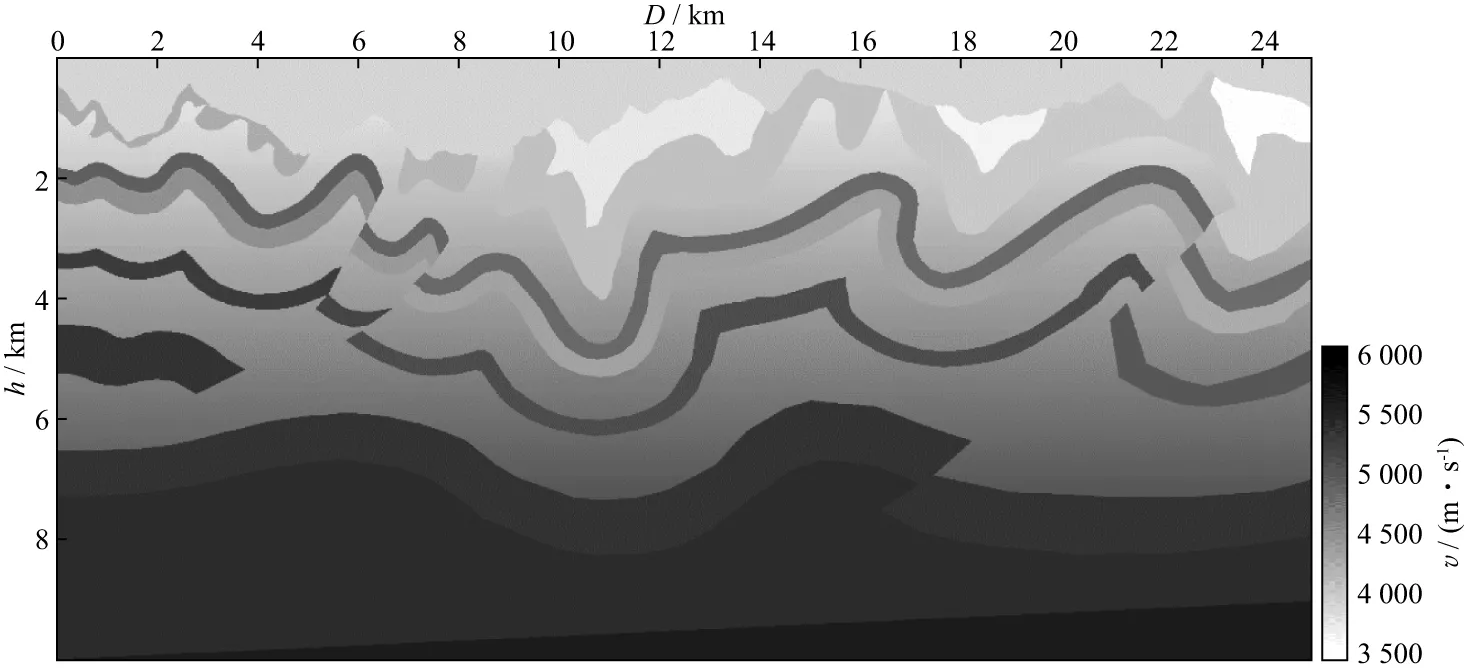
圖7 SEG起伏地表速度模型
為了獲得更高質量的成像結果,采用前文訓練好的網絡參數,對基于CNN自動拾取的傾角域限定函數進行約束。在該數據成像道集上直接使用訓練好的CNN網絡來預測傾角道集約束函數的左右邊界。隨機抽取一些傾角道集和網絡預測的結果疊加,結果如圖8所示,圖中綠線是原始自動拾取結果;黃線是自動拾取結果平滑后的曲線,將其作為CNN自動拾取最終結果。對比了圖9的成像細節,圖9a和圖9c是復雜構造不同位置處未加疊加傾角范圍成像結果,可見偏移噪聲對成像細節的影響;圖9b和圖9d是經自動拾取疊加孔徑的疊加成像結果,偏移噪聲得到較好壓制,成像質量明顯提升。在SEG起伏地表模型上的數值算例表明,本文方法很容易泛化并推廣應用到不同的數據集上。
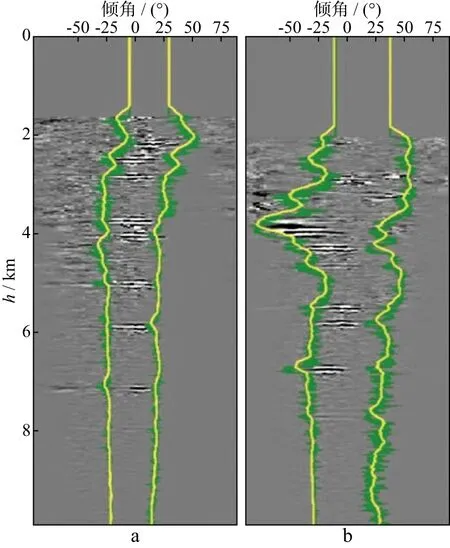
圖8 CNN在SEG起伏地表數據傾角道集上的自動拾取結果a 傾角道集1; b 傾角道集2
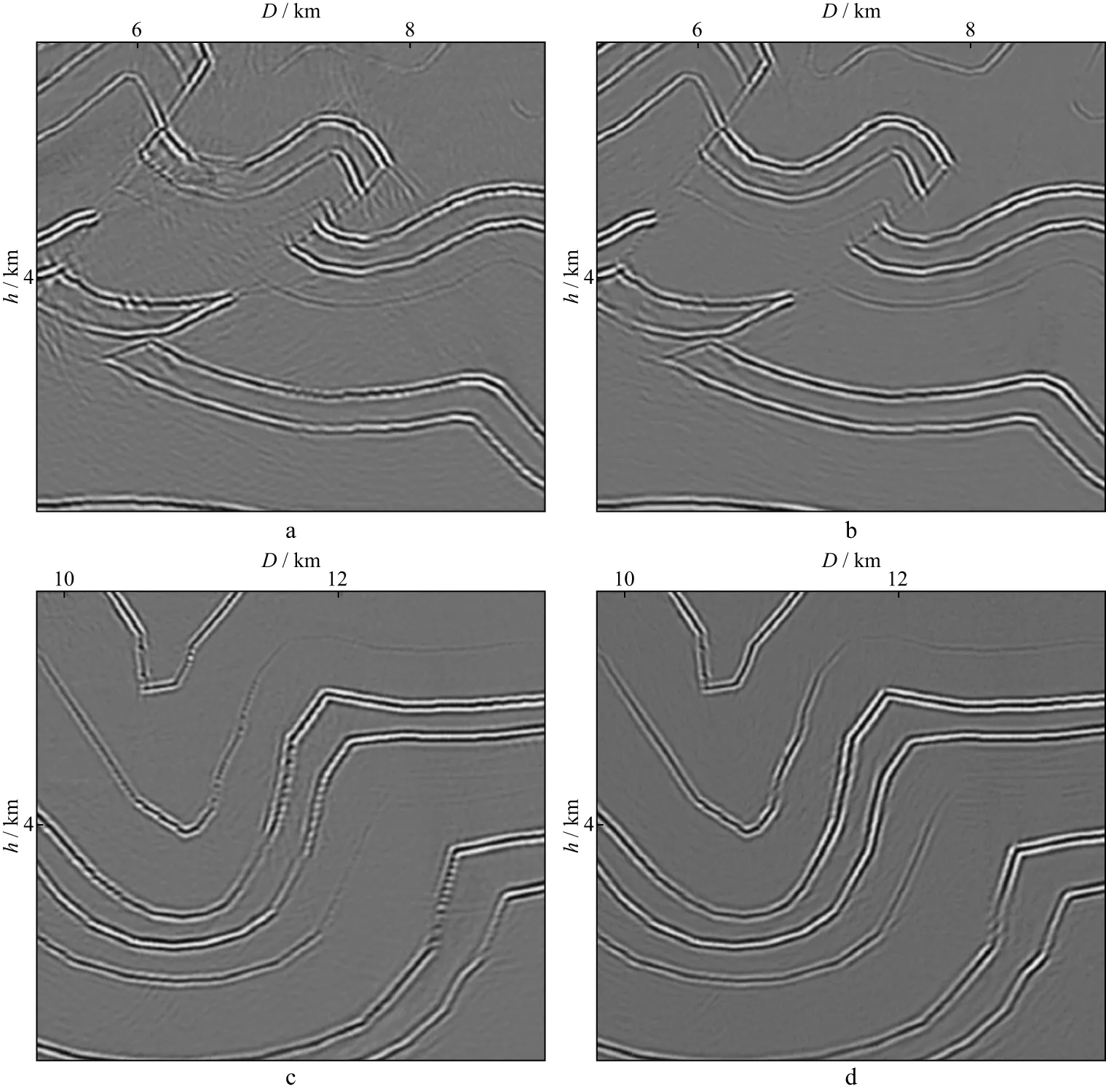
圖9 起伏地表模型數據成像結果細節對比a 復雜構造位置1處未加傾角疊加范圍成像結果; b 位置1處經自動拾取傾角疊加范圍疊加成像結果; c 復雜構造位置2處未加傾角疊加范圍成像結果; d 位置2處經自動拾取傾角疊加范圍疊加成像結果
3 結論
彈性波逆時偏移(ERTM)是地震成像研究的前沿領域。本文通過偏移輸出傾角道集,在傾角域可以有效地分離反射信號和成像噪聲,進而可對噪聲進行壓制從而提高成像質量。為了有效地輸出傾角道集,本文采用了在波場外推過程中使用坡印廷矢量的方法實現波場有效分離。然后,采用一種基于卷積神經網絡(CNN)的傾角域自動拾取方法拾取有效傾角疊加范圍,在該范圍內實現反射波最優疊加,從而抑制串擾噪聲的影響。數值算例驗證結果表明,該方法可以實現海量道集的自動拾取,通常從成像道集中隨機挑選出約10%的道集進行人工標注,即可訓練出對整體有效的神經網絡;并且該方法除了極大降低手動拾取工作量外,其拾取質量不受道集信噪比的影響,而僅僅與人工標注質量與網絡訓練參數有關,這對于低信噪比數據很有意義。相比于傳統方法,該方法計算主要集中在使用標簽數據對神經網絡訓練上,由于目標函數是兩個一維的孔徑函數,訓練的時間相比于成像運算時間較短。一旦網絡模型訓練完成,就可以對數據進行快速預測,這個特點對于三維情況下海量道集的拾取很有意義,雖然訓練需要花費一部分時間,但對海量道集進行快速自動拾取,反而能節約計算時間。最后,該方法若使用較典型的數據進行訓練,可以用小規模理論數據訓練,對大規模實際數據進行預測,從而解決同一類型拾取問題,具有一定的泛化能力,可較容易應用到其它類似的數據體上。文中數值算例證明了本文方法的有效性和實用性。接下來的工作是將本文方法拓展到散射成像領域。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
