回轉型綠籬修剪機動力學分析及虛擬樣機仿真
2021-06-01 06:46:44闞延鵬陳玉張新陽趙轉哲韓波
甘肅農業大學學報 2021年2期
關鍵詞:模型
闞延鵬,陳玉,張新陽,趙轉哲,韓波
(安徽工程大學機械工程學院,安徽 蕪湖 241000)
隨著國家倡導綠化生活的要求越來越嚴格,以及人們追求綠色舒適的生活環境,綠籬作為城市生活的點綴,起到美化環境、防塵降噪、隔離視線等作用.綠籬植物是季節性生長植物,任其生長,不僅影響道路交通安全,且美觀度不一.所以需要定期修剪維護,而人工修剪存在費時費力、工作效率低等缺點.
國外園林式綠籬修剪設備出現較早,到如今已有幾十年的發展歷史[1],由最初的手動式剪刀發展到便攜式綠籬修剪機,再到車載式綠籬機.一般便攜式修剪機采用人工手持的方式,采用往復式或旋刀式的切割刀具,動力源主要是電動機或者汽油機.自20世紀70年代開始,美國等發達國家接連研制并推廣車載懸掛式綠籬修剪機,以適應高速公路的發展以及園林養護的需求.車載式綠籬修剪機結合了往復式切割和運送機構,通過對機構的調控,可使其在不同高度、不同平面完成修剪工作,適應于工作量大、行程遠的工作環境,并能保證較高的修剪效率和質量.德國目前在綠籬機械技術方面處于領先地位,德國公司生產的綠籬修剪機,將機械臂安裝在卡車或拖拉機的前部,由液壓驅動實現伸縮和升降功能,并將綠籬修剪刀具放置在機械臂的末端.由液壓馬達進行驅動,這種設計存在自動化控制相對復雜,不易操作控制、多采用車載一體式,造價昂貴等缺點.
國內綠籬機相對于國外發展起步較晚,直到上個世紀70年代末,國內才出現了一些園林綠化機械,并于90年代得到迅速發展.如長安大學某課題組研究設計出一個車載式雙臂綠籬修剪機[2],該設備由兩組臂架組成,采用液壓動力系統,該機械主要可以同時對高速公路中央綠化帶及邊坡進行修剪,實現功能多樣化;濟南恒越機械設備有限公司設計了一款主要針對當前高速公路中央隔離帶人工修剪效率不足而進行改進的車載式綠籬修剪機[3],該設備的液壓操縱裝置是由人工操縱在駕駛室儀表臺上的控制手柄,使設備能夠靈活完成升降、水平收縮等動作,有效地提高修剪質量、節省勞動力、提高工作效率,但其功能單一,只能實現頂部和側面修剪,對于具有一定幾何曲面形狀的綠籬尚不能修剪.
因而車載式綠籬機成為當下國內城市道路綠化的首選[4].本研究結合國內外綠籬機的優缺點設計并提出一種不僅可以自動實現常規橫面、側立面綠籬的修剪,還可以通過末端軌跡運動完成多種幾何造型修剪工作的回轉型綠籬修剪機,以降低人工手持式綠籬造型修剪的勞動強度,提高工作效率,降低成本,達到全面自動化修剪.
本研究在綠籬機模型方案的基礎上,對其動力學模型進行分析計算,探究物體運動與受力之間的關系,對已建立好的綠籬機模型,簡化處理后導入虛擬樣機仿真軟件ADAMS中,通過添加約束和設置相關驅動函數對修剪系統完成軌跡運動仿真,第一可以分析修剪機設計方案的可行性,并檢查運動干涉問題,第二可以驗證機構運動是否合理,檢驗綠籬機整機機構是否存在運動干涉及“死點”問題,第三可以根據仿真模型模擬綠籬機真實運動空間的球形軌跡,得到各關節驅動的速度、加速度、位移與關節驅動力之間的關系.
1 動力學概述
在機器人操作臂的領域中,動力學研究的核心就是機器人臂桿的運動和所需要的驅動力或驅動力矩之間的關系,即當機器人的臂桿承受一定的載荷時,以一定的速度和加速度按照規定的軌跡進行運動,再根據機器人臂桿的運動過程來確定各驅動關節所需要的驅動力或驅動力矩[5].本研究根據回轉型綠籬修剪機的結構特性采用拉格朗日動力學方法對其進行動力學理論分析[6],建立拉格朗日動力學方程,為接下來對綠籬修剪機進行動力學仿真分析提供理論依據[7-8].
1.1 回轉型綠籬機的結構
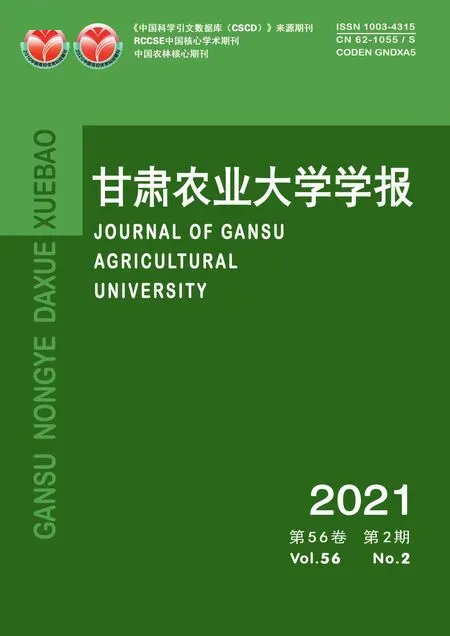
設計的六自由度回轉型綠籬修剪機,原理是通過綠籬機各機構之間的升降、伸縮、回轉等裝置的聯動實現末端圓盤修剪刀具在空間上的螺旋軌跡運動,完成修剪任務,結構如圖1所示.
1:電動移動平臺;2:固定方架;3:回轉平臺;4:伸縮電機;5:升降裝置;6:升降電機;7:絲桿滑塊;8:頂層伸縮外臂;9:旋轉電機;10:底層伸縮內臂;11:刀具旋轉馬達;12:角度調節裝置.1:Electrically moving platform;2:Fixed square frame;3:Rotary platform;4:Extension electric machine;5:Lifting and mounting;6:Up and down electric machine;7:Screw slider;8:The top layer extends the outer arm;9:Rotary electric machine;10:Bottom stretch inner arm;11:The knife and tools to turn the horse;12:Angle adjustment section mounting.圖1 回轉型綠籬機主體結構示意圖Figure 1 Schematic diagram of the main structure of the transformed hedgerow
1.2 綠籬機系統動力學建模分析
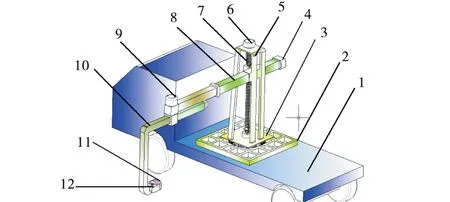
由于該綠籬機具有多個移動關節和轉動關節,若進行整體動力學析,計算分析較為復雜,所以本研究將綠籬機模型拆分為兩個系統.如圖2和圖3所示.
選取豎直升降關節和水平移動關節作為機構的兩個連桿,作為系統1進行動力學分析,如圖1所示,分別用m1和m2來表示兩個連桿的質量,用q1和q2來表示兩關節的位移量.因為未涉及到轉動關
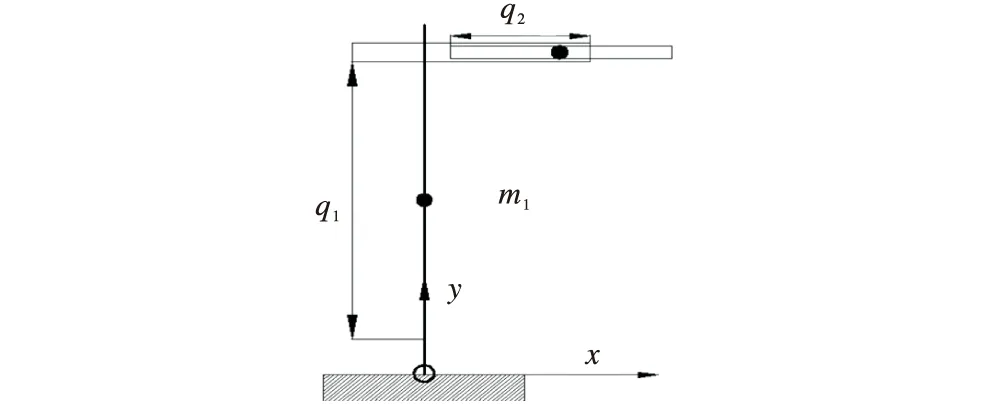
圖2 系統模型Figure 2 System model 1
圖3 系統模型3Figure 3 System model 3
節,因此不需要考慮轉動動能和轉動勢能.
由于q1和q2用來表示系統的廣義坐標,因此該系統動能可用如下公式表達:
(1)
式中:mij:n×n的質量矩陣的第(i,j)各元素;qi,qj:系統的廣義坐標和廣義速度,=1,2,…,n.
由于該綠籬修剪機的兩個關節只有位移沒有旋轉,所以角速度ω的雅克比系數為0,該系統的動能只與移動關節的位移速度有關,可知:
(2)
根據機器人拉格朗日動力學方程分析步驟對所選取綠籬修剪機的兩個移動關節進行動力學方程建立,具體如下:
(1)連桿速度
由矢量積雅可比矩陣關系可知,兩連桿重心的線速度分別為:
(3)
又因該綠籬機的兩關節運動分別為豎直移動和水平移動,則根據式(3)及在兩個方向上坐標關系可求出這兩關節的雅可比矩陣,具體如下所示:
(2)系統的動能
該系統的總動能可表示為:
(4)
將上述求出的雅可比矩陣代入式(4)得:
(5)
(3)系統的勢能
根據綠籬修剪機的結構可以發現,所選取的兩個移動關節的質量m1和m2勢能只與q1有關,可以得到該結構系統的總勢能為:
P=gT(m1+m2)q1
(6)
式中:gT:重力加速度矢量,g=[gx,gy,gz].
(4)拉格朗日函數
首先根據上述求得的系統動能和勢能以及拉格朗日定義可寫出拉格朗日函數,繼而根據拉格朗日函數寫出系統的動力學方程.
由于已知該系統的拉格朗日函數為:
L=Ek-Ep
(7)

(8)
將上述求得的動能(5)與勢能(6)代入式(8)得:
(9)
(5)拉格朗日動力學方程
由于已知該系統的拉格朗日動力學方程[9-10]為:
(10)
式中:L:拉格朗日函數(又稱拉格朗日算子);n:連桿數目;qi,qi:系統的廣義坐標和廣義速度;τi:作用在第i個坐標上的廣義力或力矩.
(11)
對上式關于時間求導得該系統最終動力學模型為:
(12)
同理系統2由綠籬修剪機末端后三個自由度組成,包含兩個轉動關節和一個移動關節.由于旋轉馬達(關節1)與底層伸縮臂固定連接,即設傳動比為1,旋轉馬達的轉動慣量為J1,馬達轉動角度為θ1,馬達扭矩為T,旋轉馬達相對于底層伸縮臂及其末端裝置之阻尼為B,定義廣義坐標為θ和r.
(6)系統總動能:
(13)
式中:Jv:底層伸縮臂線速度雅可比矩陣;r1:關節2的廣義位移,r1為變量;r3:關節3的廣義坐標,r3為常量.
(7)系統總勢能
由于綠籬機回轉馬達在進行旋轉時,質心不會變動,所以旋轉馬達的勢能不會發生變化,則其他兩個關節勢能為:
關節2勢能:
P2=gm1r1sinθ1
(14)
關節3勢能:
P3=m2g(r3cosθ3+r2)
(15)
系統總勢能為:
P=P2+P3=gm1r1sinθ1+m2g(r3cosθ3+r2)
(16)
式中:g:重力加速度.
(8)拉格朗日函數.
根據表達式(13)、(16),可以得到拉格朗日函數:
[gm1r1sinθ1+m2g(r3cosθ3+r2)]
(17)
(9)系統動力學方程.根據方程式(18),首先計算旋轉關節1的力矩τ1:
(18)
則同樣,計算綠籬機移動關節2上的作用力F2:
(19)
計算綠籬機末端角度擺動關節3上的力矩τ3:
(20)
2 綠籬機ADAMS動力學仿真
2.1 仿真模型的建立與導入
ADAMS軟件具有很強的仿真分析能力[11-15],但實體建模較困難,須通過三維建模軟件如SolidWorks模塊接口實現數據交換[16],如圖4為完成建模并導入的綠籬機模型.
2.2 施加運動副約束
為使導入的不同實體構件模型組成一個完整的機械系統,在設置好導入模型相關參數后,需要對綠籬修剪機模型利用添加約束來限制兩個構件之間的相對運動[17-18].根據實際需要,本研究所設計綠籬修剪機主要用到移動副、固定副和旋轉副,如圖5所示,具體這三種運動副約束在ADAMS綠籬修剪機模型中添加的位置情況如下:
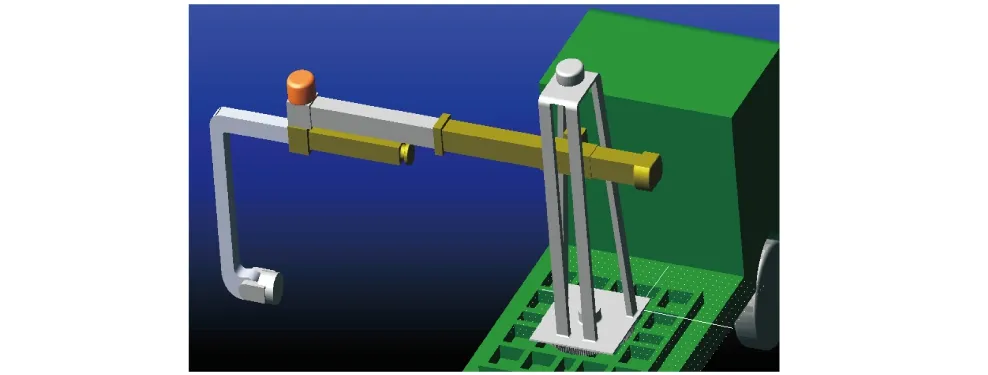
圖4 導入ADAMS中的綠籬機模型Figure 4 Import the hedgerow machine model in ADAMS
(1)固定副.根據對所設計綠籬修剪機模型的分析,由于路基和移動底盤車之間、路基與大地之間、旋轉電機與伸縮臂之間以及固定方架與移動底盤車之間沒有相對運動,需要在兩構件之間設置固定副,因此綜上共建立4個固定副.
(2)移動副.由于整個綠籬修剪機系統具有多個移動關節,包括豎直升降關節、兩個水平移動伸縮臂關節,因此在豎直升降關節與伸縮臂之間、兩個伸縮外臂與內臂之間設置移動副,共需要3個移動副.
(3)旋轉副.所設計的綠籬修剪機具有3個旋轉關節,包括回轉平臺與固定方架之間、旋轉電機與底層伸縮臂之間以及角度調節裝置的角度擺動,總計需要3個旋轉副.
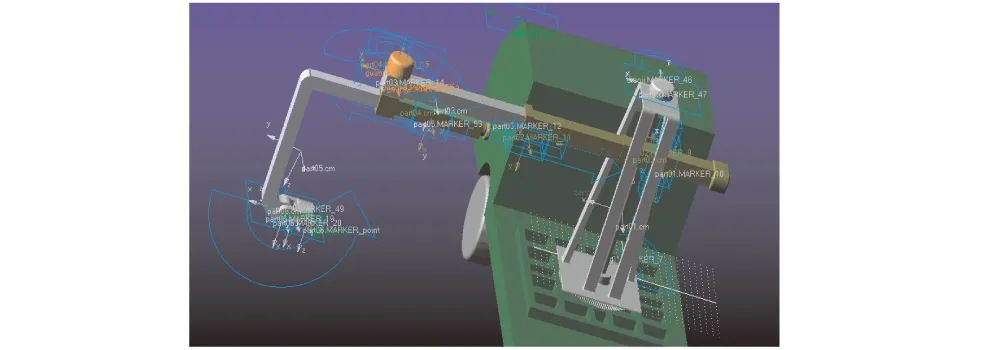
圖5 添加約束后的綠籬修剪機模型Figure 5 Model of the hedgerow trimmer after adding constraints
2.3 施加驅動及設置驅動函數
在ADAMS/View中,在模型上定義的驅動就是對運動副上未約束的自由度繼續進行約束,再按照規劃好的軌跡進行運動,一般是在運動副上添加驅動[18-19],本研究在綠籬修剪機模型上已經添加的運動副約束的基礎上施加驅動,當完成指定軌跡運動時,需要通過施加的驅動上設置各活動關節驅動函數來控制關節運動軌跡.
以修剪成半徑600 mm的球狀綠籬作為仿真目標,使末端修剪刀具通過各個關節的聯動從而在球形表面上完成運動軌跡.如上圖6所示為選取的一段1/4圓弧軌跡,設O為末端刀具修剪圓弧起始點坐標(0,0),L為旋轉中心軸線,P為末端刀具修剪圓弧終止點坐標(-600,600),則刀具的末端軌跡運動可表示為圓的軌跡:
(x+600)2+y2=6002-600≤x≤0,0≤y≤600
(21)

圖6 圓弧軌跡運動示意圖Figure 6 Schematic diagram of arc trajectory motion
由上式(6~22)圓弧軌跡可分別表示x、y方向上也就是伸縮和升降關節的位移關于時間的函數方程為:
(22)
式中:t:初設完成球形軌跡的仿真時間.
其中,圓弧軌跡可分別表示x、y方向上也就是伸縮和升降關節的位移關于時間的函數方程.由上式(22)的軌跡曲線隨著仿真時間t的變化可分別求出底層伸縮臂和升降裝置的水平及豎直位移變化量.對于末端角度調節裝置的驅動函數方程求解方法,則先求出圓軌跡方程曲線的斜率為:
(23)
將上述x(t)代入上式(6-24)中可得:
(24)
接著,再求該斜率的反正切,原因是刀具末端始終與圓弧面相切,角度調節關節角度與圓弧面斜率所對應的角度在0°~90°變化,由此得到所對應的角度變化值為:
Δθ=arctan(y(t))0≤t≤15
(25)
通過上式(25)可以得到擺動關節的角度變化值,當t=0時,Δθ≠0,則需要用90deg漸變的角度去調和,使它從0開始變化.
由于采用ADAMS軟件在完成實際球形軌跡仿真過程中,回轉平臺和上層伸縮臂分別起到定位和使末端修剪裝置到達待修剪綠籬中心位置的作用,所以在這兩個活動關節所添加的運動副約束上不施加驅動.只需施加4個關節的驅動函數.根據上述圓弧驅動函數方程式的理論推導在ADAMS中輸入關于時間的驅動函數.以下是進行球形軌跡運動仿真的各關節驅動函數.設置各關節的驅動函數如下所示.
(1)豎直升降裝置的驅動函數.abs((600+211.366 082 571 8)*sin(pi/30*time))-700
(2)回轉關節的驅動函數.3 600d*time
(3)底層伸縮臂的驅動函數.(600+211.366 082 571 8)*cos(pi/30*time)-600-211.366 082 571 8+(600-309.136 489 083 2)
(4)角度擺動關節的驅動函數.-arctan(-(600*cos(pi/30*time))/(sqrt(600**2-(600*cos(pi/30*time))**2)))-90d
3 綠籬機末端球形軌跡仿真
設置各關節驅動函數后,開始進行仿真控制[20],設置仿真時間為t=15 s,運行通過各關節的聯動完成球形技術指標的螺旋軌跡運動如下圖7所示.
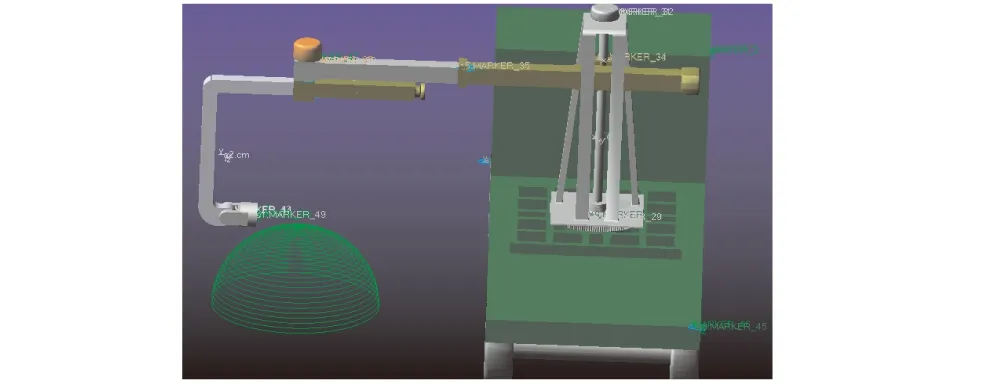
圖7 球形螺旋軌跡仿真示意圖Figure 7 Schematic diagram of spherical spiral trajectory simulation
ADAMS有針對仿真后處理的相應模塊,在對綠籬機末端球形軌跡仿真計算之后,就可以對各運動副上的位移、速度、加速度、作用力和作用力矩等數據進行處理.
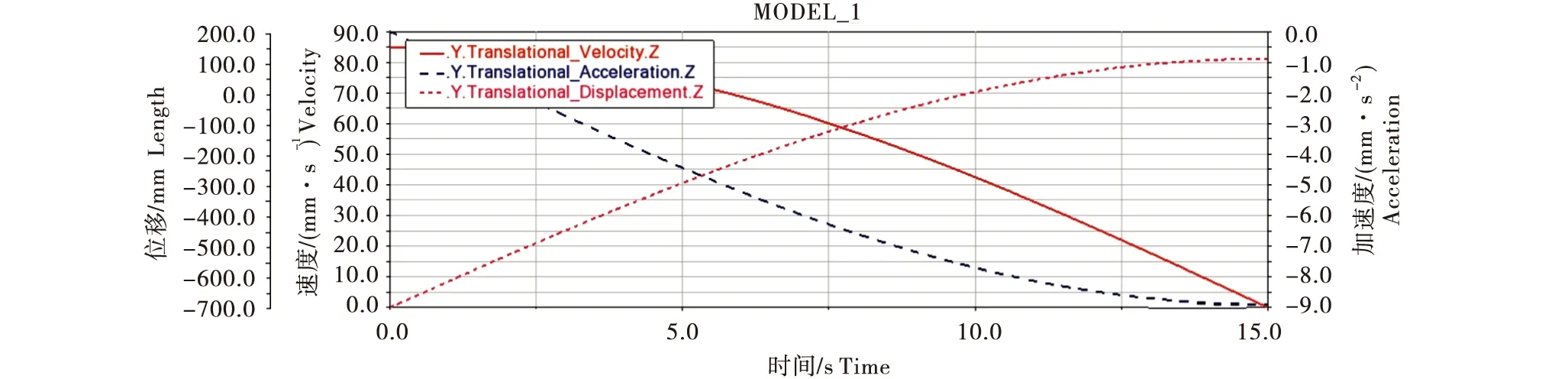
圖8 豎直升降關節驅動時間-速度、加速度及位移曲線Figure 8 Driving time-velocity,acceleration and displacement curves of vertical lifting joint
豎直升降關節主要由絲桿、電機驅動、絲桿滑臺等裝置組成.升降裝置末端連接處承受主要載荷,在實際綠籬修剪工作過程中主要作用是對綠籬植物螺旋運動修剪時,調節上下高度的變化.如上圖8所示.在整個仿真運行過程中,自底向上沿著+Z方向進行移動,升降關節的最大速度為85 mm/s,隨著時間變化,其升降速度逐漸變慢,但最后幾秒進行頂部修剪時速度保持恒定直到修剪結束;升降關節加速度隨著修剪時間的推移,逐漸變小,在最后頂部修剪時的加速度為-9 mm/s2;修剪機在修剪綠籬時自下而上,由圖可知升降關節的位移從下到上,最后修剪頂部時的位移達到接近100 mm.
底層伸縮臂是當在修剪半徑不一的曲面綠籬時,起到調節半徑大小的作用.如圖9所示為底層伸縮臂關節的驅動時間-位移曲線變化圖,伸縮機構做變幅變周期的往復運動.0~8 s表示為Y軸負方向位移變化;當仿真進行到8秒時,位移變化為0,表示伸縮位移回到導入ADAMS中模型的初始位置;8~15 s表示伸縮臂的位移量沿著Y軸正方向不斷增加.
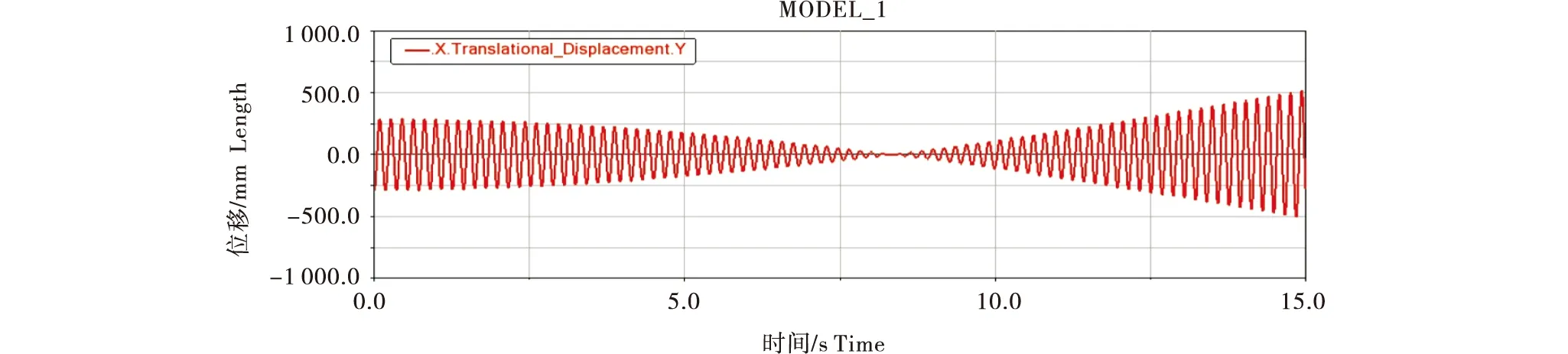
圖9 底層伸縮關節驅動時間-位移曲線Figure 9 Driving time-displacement curve of the bottom telescopic joint
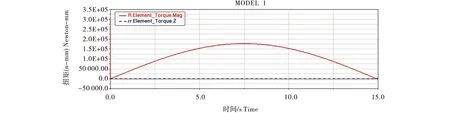
圖10 旋轉關節及角度擺動關節驅動時間-扭矩變化曲線Figure 10 Driving time-torque variation curves of rotatory and angular swing joints
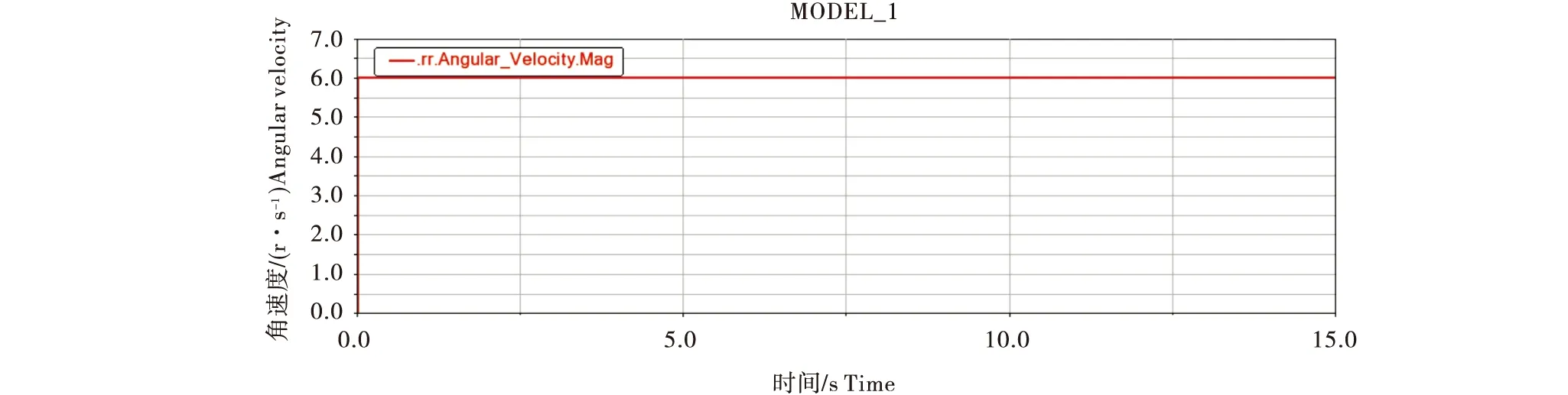
圖11 角度擺動關節驅動時間-角速度變化曲線Figure 11 Variation curve of driving time and angular velocity of angular swing joint
4 結論
對設計的回轉型綠籬機結構的動力學模型理論進行分析,并在ADAMS軟件中進行虛擬樣機的仿真分析.首先,將綠籬機結構拆分為兩個系統結構,采用拉格朗日動力學建模方法對其進行動力學研究,構造拉格朗日函數,再將其帶入拉格朗日方程式得出動力學方程,可以計算出旋轉關節的力矩、移動關節的作用力、末端角度擺動關節的力矩,可根據各關節驅動力或力矩,求解計算機構的運動位移、速度及加速度曲線關于時間函數的曲線關系.最后,以修剪成半徑600 mm的球狀綠籬作為仿真目標,仿真時間為15 s,設置各關節的驅動函數,通過ADAMS實現虛擬樣機球形軌跡運動,從得出的曲線圖中可知升降關節的最大速度為85 mm/s,速度隨著時間的增長逐漸變慢,在修剪頂部時則保持恒定,在最后頂部修剪時的加速度為-9 mm/s2,位移達到接近100 mm,伸縮機構做變幅變周期的往復運動.驗證綠籬機的運動可行性,檢查運動并無干涉問題,測量觀察各驅動關節的曲線數據.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19