一種基于鍵合圖模型的未知輸入觀測器設(shè)計
2021-05-21 01:50:40楊大鵬馬付建劉宇張生芳沙智華
大連交通大學(xué)學(xué)報 2021年2期
楊大鵬,馬付建,劉宇,張生芳,沙智華
(大連交通大學(xué) 機械工程學(xué)院,遼寧 大連 116028)*
隨著控制系統(tǒng)結(jié)構(gòu)和操作的日益復(fù)雜化,尤其是系統(tǒng)時變(time-varying LTV)、非線性(non linear)等特性越發(fā)明顯,經(jīng)典的線性定常系統(tǒng)(linear time-invariant system LTI)理論已經(jīng)不能很好地適用于控制系統(tǒng)的特性分析及綜合問題[1].系統(tǒng)的復(fù)雜化也帶來了系統(tǒng)干擾問題,而干擾的存在會誘發(fā)系統(tǒng)故障.能否在故障發(fā)生時及時地識別故障狀態(tài),確定故障位置及故障嚴重程度對于故障診斷及消除顯得尤為重要.由于建模的簡化處理,且系統(tǒng)存在一些未知的輸入干擾及環(huán)境噪聲, 各方因素都會直接影響到系統(tǒng)性能,會導(dǎo)致誤報.近幾十年以來,學(xué)者針對故障診斷問題在航空、機電及能源等系統(tǒng)做了大量的研究[2-4].
在解耦干擾方面, 未知輸入方法已發(fā)展出了很多方法, 如頻域方法、未知輸入觀測器方法、幾何方法等[5].其中未知輸入觀測器(unknown input observer UIO)是系統(tǒng)故障解耦重構(gòu)的有效方法.其基本思路是通過系統(tǒng)輸出的測量來實現(xiàn)系統(tǒng)的重構(gòu), 將觀測器與系統(tǒng)的輸出之差作為殘差來判斷系統(tǒng)是否存在干擾[6].在進行未知輸入觀測器設(shè)計時,需要對系統(tǒng)結(jié)構(gòu)特性進行分析.其中,系統(tǒng)的不變零點特性對應(yīng)觀測器的存在條件.而通過研究有限結(jié)構(gòu)特性,殘差方程的固定極點特性對系統(tǒng)穩(wěn)定性影響至關(guān)重要[7].針對線性時不變系統(tǒng),未知輸入觀測器的主要研究方法有幾何法[8]、代數(shù)法[9]、鍵合圖方法[10-11]等.由于時變特性帶來的系統(tǒng)有限結(jié)構(gòu)尤其是不變零點特性的改變,模論方法結(jié)合系統(tǒng)鍵合圖模型方法可有效解決線性時變系統(tǒng)未知輸入觀測問題[11-12].目前,滑模控制[13-14]、線性矩陣不等式[15]、自適應(yīng)[16]等方法已在非線性系統(tǒng)UIO設(shè)計中得到較多的應(yīng)用.
本文主要針對線性定常與線性時變系統(tǒng)的未知輸入觀測問題進行研究.在建立系統(tǒng)鍵合圖模型并進行系統(tǒng)特性分析后,采用廣義逆矩陣構(gòu)建系統(tǒng)未知輸入觀測器.該觀測器的設(shè)計可以有效運用到系統(tǒng)滿足匹配條件的狀況.通過對一直線電機模型進行仿真分析,在不同系統(tǒng)及未知輸入特性狀態(tài)下可有效對未知輸入進行觀測,證明了所提出方法的可行性和有效性.
1 問題描述
考慮一類具有未知輸入的線性系統(tǒng)
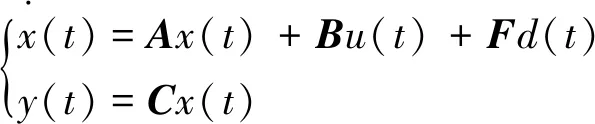
(1)
式中:x(t)∈Rn,y(t)∈Rp,u(t)∈Rm分別為系統(tǒng)的狀態(tài)、測量輸出和控制輸入;d(t)∈Rq為系統(tǒng)干擾和建模不確定性等未知輸入; 控制輸入u(t)和未知輸入d(t)有界且無限連續(xù)可導(dǎo).當不存在系統(tǒng)干擾時,線性定常模型用∑(C,A,F)表示,而∑(C(t),A(t),F(t))對應(yīng)線性時變系統(tǒng).假設(shè)矩陣B,F(xiàn)為列滿秩矩陣,矩陣C為行滿秩矩陣.
系統(tǒng)強的可探測性(strong detectability)與未知輸入觀測器的存在與否相關(guān).而強可探測性與最小相條件相關(guān),系統(tǒng)∑(C,A,F)需滿足系統(tǒng)零點δ∈(復(fù)平面)同時滿足如下條件:

(2)
當系統(tǒng)滿足強可探測性,并同時滿足rank[CF]=rank[F]=q時被稱為滿足觀測器匹配條件(observer matching condition),該條件為某些未知輸入觀測器的充要條件.但該條件不能總是得到滿足.針對不滿足匹配條件的系統(tǒng),滑模觀測器方法可有效解決該問題,并從線性系統(tǒng)擴展到非線性未知輸入觀測器問題.
2 觀測器設(shè)計
針對線性系統(tǒng),文獻[17]運用代數(shù)學(xué)方法提出如下狀態(tài)觀測器:
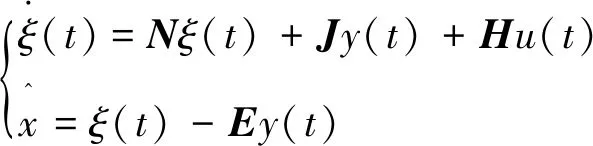
(3)

對于矩陣Am×n,如果其列為線性不相關(guān),那么矩陣ATA可逆.矩陣A的廣義逆矩陣可表示為A+=(ATA)-1AT.此時該廣義逆矩陣為矩陣A的左逆矩陣:A+A=In.
如果其行為線性不相關(guān),那么矩陣AAT可逆.矩陣A的廣義逆矩陣可表示為A+=AT(ATA)-1.此時該廣義逆矩陣為矩陣A的右逆矩陣:AA+=Im.
2.1 線性定常系統(tǒng)觀測器設(shè)計
針對式中的線性定常系統(tǒng)∑(C,A,F),根據(jù)假設(shè)條件未知輸入矩陣F滿足列線性獨立.所以矩陣F的廣義逆矩陣F+為其左逆矩陣,即F+F=Iq.式中的狀態(tài)方程可以表達為:
(4)

(5)
(6)
式中矩陣N,J,H,E的計算方法及步驟可通過文獻[18]查得.通過廣義逆矩陣結(jié)合代數(shù)學(xué)方法得到的系統(tǒng)及未知輸入觀測器系統(tǒng)框圖如圖1所示.
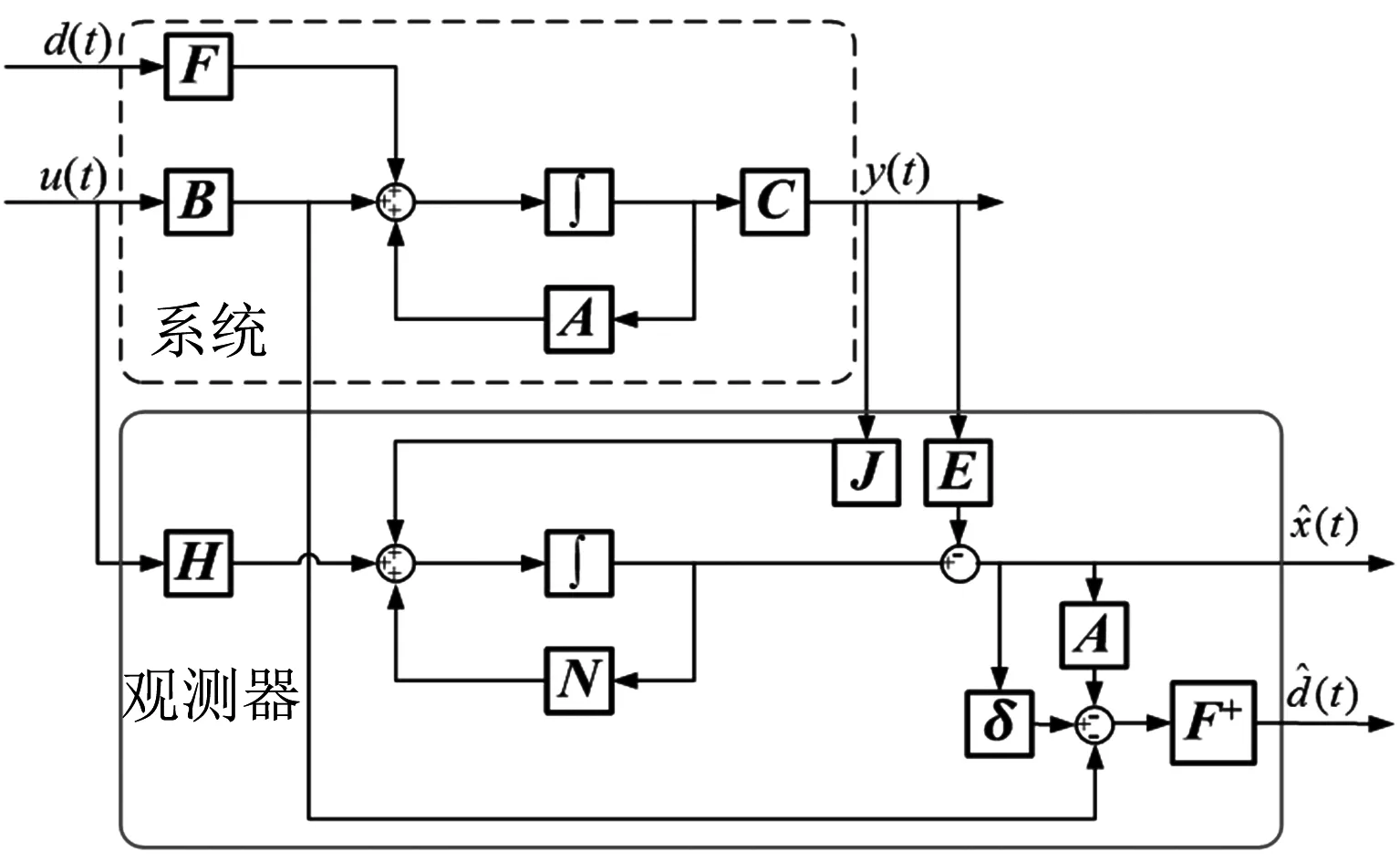
圖1 系統(tǒng)及未知輸入觀測器系統(tǒng)框圖
2.2 線性時變系統(tǒng)觀測器設(shè)計
線性時變系統(tǒng)∑(C(t),A(t),F(t))通過廣義逆矩陣構(gòu)建狀態(tài)及未知輸入觀測器的方法及步驟與上述對線性定常系統(tǒng)∑(C,A,F)類似.區(qū)別主要在各矩陣參數(shù)具有時變特性,進而影響系統(tǒng)特性,尤其是不變零點.而不變零點與系統(tǒng)的逆系統(tǒng)的極點相關(guān)聯(lián),從而影響系統(tǒng)穩(wěn)定性.線性時變系統(tǒng)的狀態(tài)及未知輸入觀測器如下式所示:
(7)
令P(t)=I+E(t)C(t),線性時變系統(tǒng)∑(C(t),A(t),F(t))存在全階觀測器的條件為:
(1)N(t)為Hurwitz矩陣;

(3)P(t)F(t)=0;
(4)H(t)=P(t)B(t).
(8)
(9)
2.3 鍵合圖方法確定系統(tǒng)強可探測性
如上所述,設(shè)計系統(tǒng)狀態(tài)及未知輸入觀測器的第一步便是確定系統(tǒng)是否滿足強可探測性.這一過程主要分為兩步:一是判定匹配條件rank[CF]=rank[F]是否滿足,二是系統(tǒng)可探測性是否滿足.對于一般系統(tǒng),此條件的判定過程較為復(fù)雜.
鍵合圖是針對多種系統(tǒng)的一種圖形化的建模工具,在系統(tǒng)分析過程中有獨特的優(yōu)勢.對于單輸入輸出系統(tǒng)∑(C,A,F),當其鍵合圖模型中僅存在一條因果路徑(causal path)時系統(tǒng)即滿足匹配條件.而系統(tǒng)的可探測性與系統(tǒng)的不變零點屬性相關(guān). 對于線性定常系統(tǒng)∑(C,A,F),是否存在零值的不變零點可通過鍵合圖模型進行快速判斷.而零值的不變零點的存在不滿足強可探測性條件.所以對于系統(tǒng)鍵合圖模型的分析,首先應(yīng)確定是否存在零值的不變零點.鍵合圖模型可以根據(jù)系統(tǒng)分析目的的不同采用不同的因果關(guān)系(causality)設(shè)置.采用積分因果關(guān)系的鍵合圖模型(BGI)可以確定是否存在不變零點.而具有微分因果關(guān)系的鍵合圖模型(BGD)可用來確定是否存在零值的不變零點.進一步通過采用雙向因果關(guān)系的鍵合圖模型(BGB)來確定不變零點的值,當不變零點的實部小于零,強可探測性即得到滿足.
3 實驗仿真
本節(jié)通過一個直流電機系統(tǒng)來驗證本文方法的有效性,該系統(tǒng)建模后得到如圖2所示的鍵合圖模型,其數(shù)學(xué)模型如式所示.
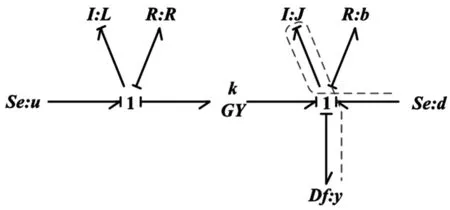
圖2 系統(tǒng)鍵合圖模型(積分因果關(guān)系)
(10)
通過對系統(tǒng)鍵合圖模型在不同因果關(guān)系下的因果路徑進行分析,可知該系統(tǒng)可觀可控.系統(tǒng)參數(shù)如表1所示.

表1 直流電機系統(tǒng)各參數(shù)值
通過對系統(tǒng)BGI、BGD及BGB鍵合圖模型分析可知,系統(tǒng)存在一不為零的負值不變零點(δ= -500),所以系統(tǒng)滿足匹配條件及強可探測性條件.由此可見,系統(tǒng)存在如式的未知輸入觀測器.
3.1 線性定常系統(tǒng)仿真
通過計算可得式中各參數(shù)矩陣的具體數(shù)值:


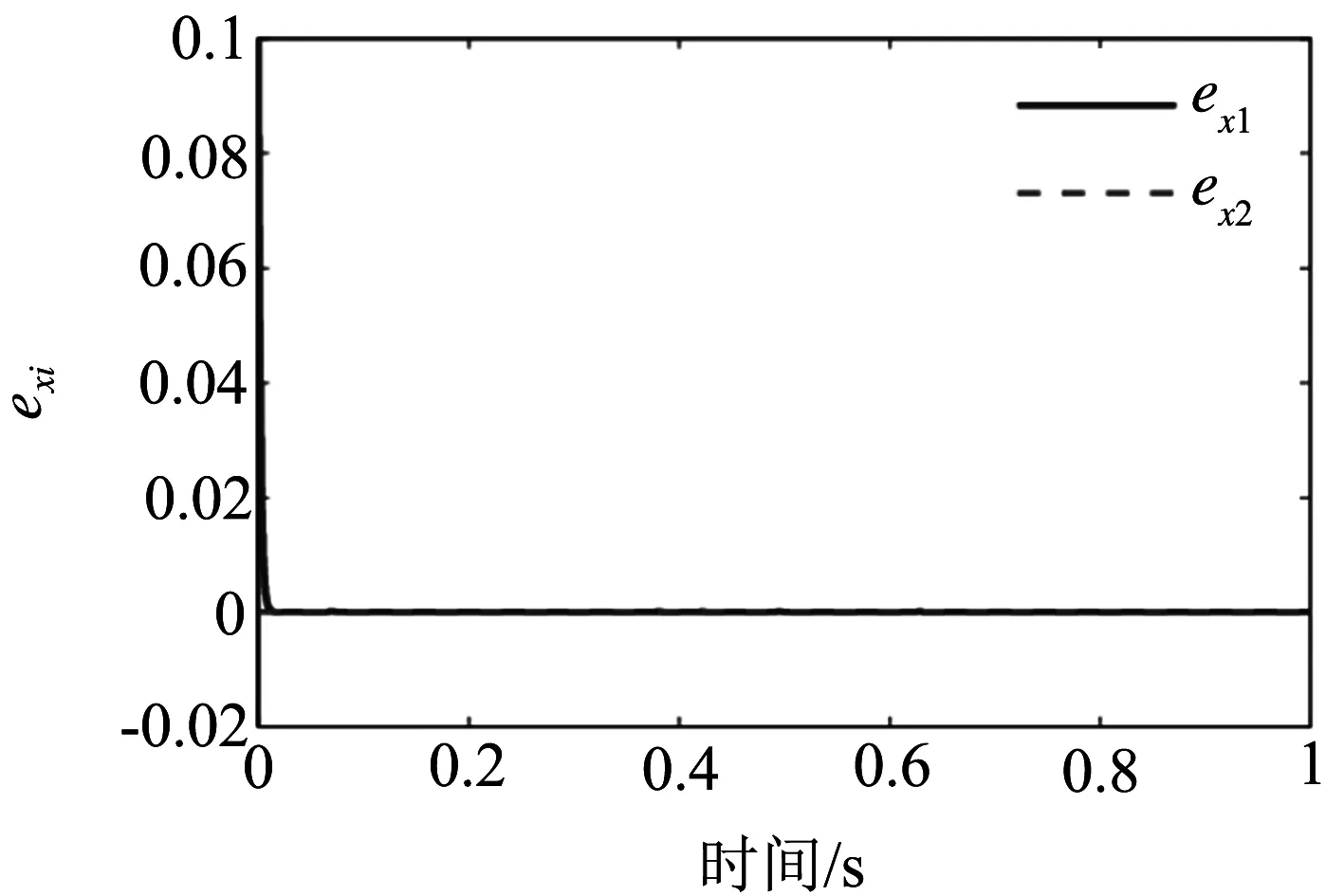
圖3 系統(tǒng)∑(C,A,F)狀態(tài)觀測殘差分析
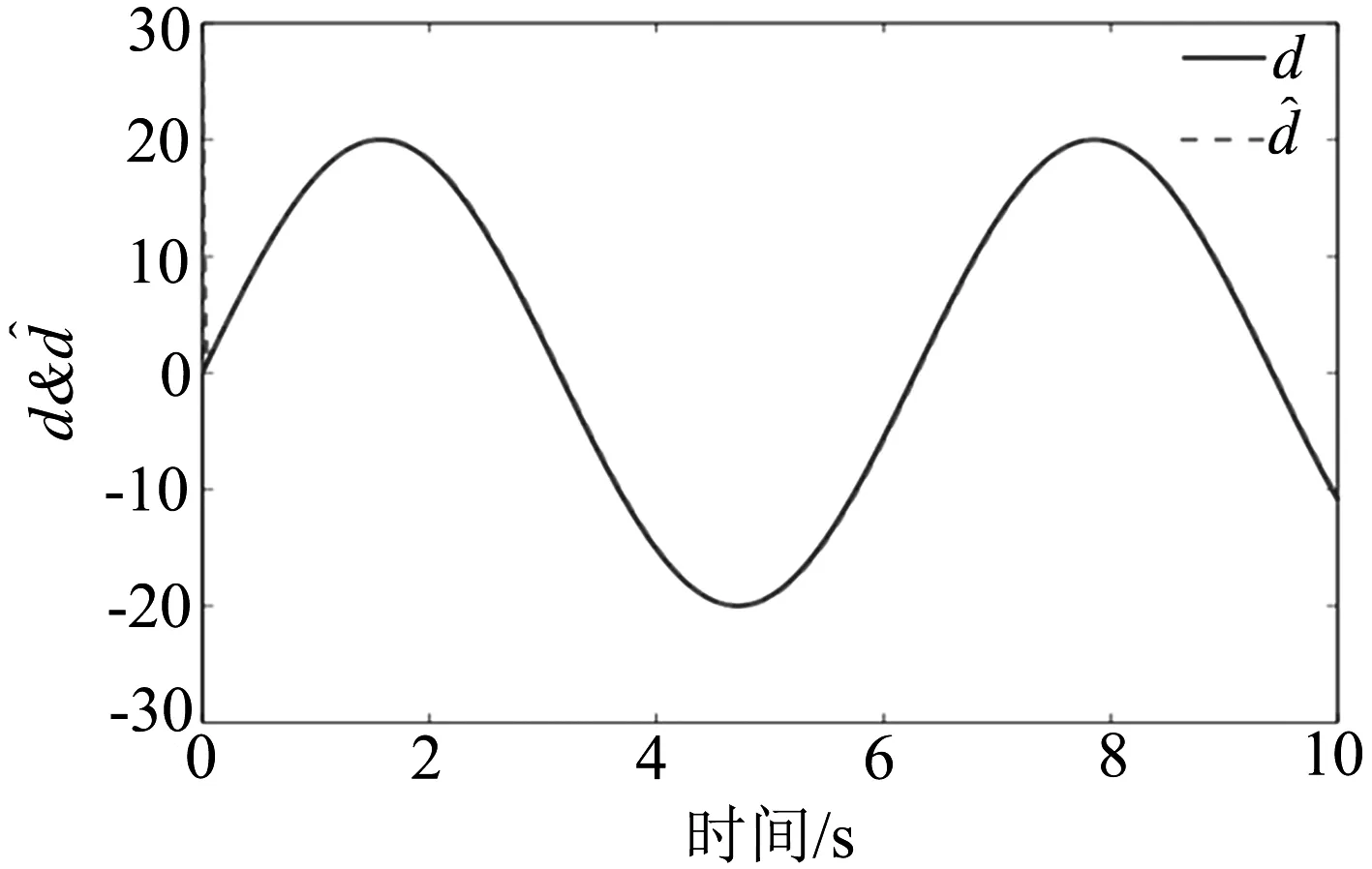
圖4 系統(tǒng)實際未知輸入變量與未知輸入觀測量對比
通過圖3和圖4的仿真結(jié)果可以看出,所構(gòu)建的系統(tǒng)狀態(tài)及未知輸入觀測器可以快速準確的對系統(tǒng)∑(C,A,F)的狀態(tài)及干擾輸入變量進行觀測.
3.2 線性時變系統(tǒng)仿真
針對線性時變系統(tǒng)仿真,令表1中的參數(shù)k=cos(t)+1.2,系統(tǒng)∑(C,A(t),F)變?yōu)闀r變系統(tǒng),即矩陣A(t)具有時變參數(shù).因為時變特性引起的系統(tǒng)零極點屬性的改變,時變系統(tǒng)的難點在于極點配置.通過矩陣計算,時變系統(tǒng)∑(C,A(t),F)的不變零點仍滿足δ= -500.系統(tǒng)∑(C,A(t),F)具有式形式未知輸入觀測器,通過矩陣計算各參數(shù)矩陣為:


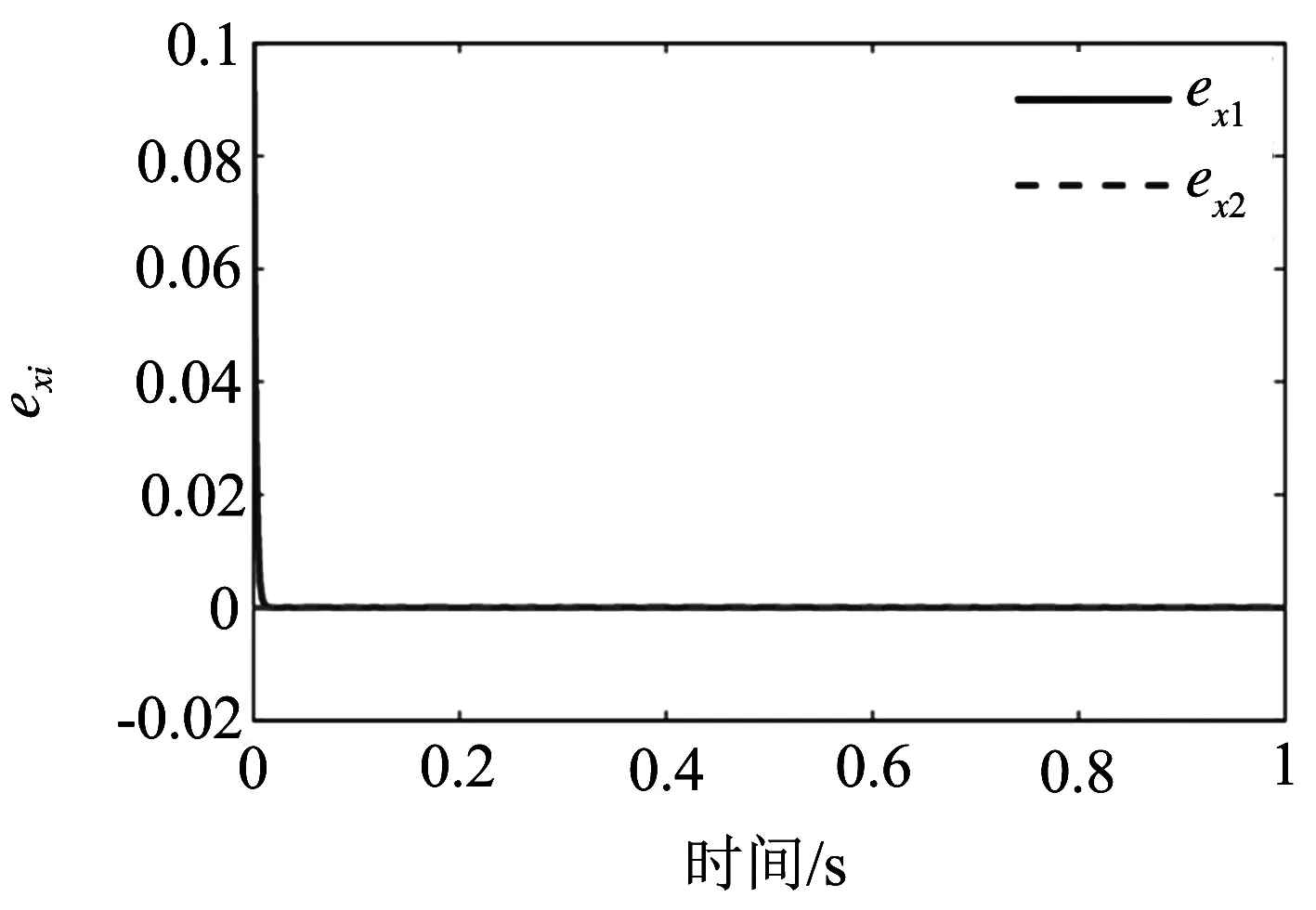
圖5 系統(tǒng)∑(C,A,F)狀態(tài)觀測殘差分析
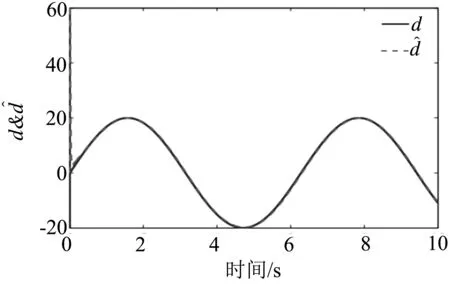
圖6 時變系統(tǒng)未知輸入實際與觀測量對比
通過圖5和圖6的仿真結(jié)果可以看出,對時變系統(tǒng)∑(C,A(t),F)所構(gòu)建的系統(tǒng)狀態(tài)及未知輸入變量觀測器也可以快速準確的對的狀態(tài)及干擾輸入變量進行觀測.
4 結(jié)論
本文提出了一種針對滿足匹配條件的線性定常和線性時變系統(tǒng)狀態(tài)變量及未知輸入變量觀測器設(shè)計方法.該方法利用廣義逆矩陣結(jié)合代數(shù)學(xué)方法構(gòu)建未知輸入觀測器.針對系統(tǒng)是否滿足匹配條件,利用線性系統(tǒng)鍵合圖模型給出了圖形化判定方法.同時給出了利用鍵合圖模型對線性定常和時變系統(tǒng)不變零點及觀測器極點配置的方法.本文所提未知輸入觀測器方法不需要復(fù)雜的計算,適用范圍更廣. 最后,將本文設(shè)計的未知輸入觀測器應(yīng)用到直流電機系統(tǒng)的未知輸入重構(gòu)中,仿真結(jié)果表明了本文所提方法的可行性和有效性.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
