部分模糊度固定方法在GNSS/INS緊組合中的應(yīng)用研究
2021-05-18 12:07:36鄂盛龍童夢想羅穎婷許海林
導(dǎo)航定位與授時 2021年3期
關(guān)鍵詞:環(huán)境
鄂盛龍,周 剛,儲 超,童夢想,羅穎婷,許海林
(1. 廣東電網(wǎng)有限責(zé)任公司電力科學(xué)研究院,廣州 510620;2.武漢大學(xué)GNSS技術(shù)研究中心,武漢 430072)
0 引言
全球衛(wèi)星導(dǎo)航定位(Global Navigation Satellite System,GNSS)技術(shù)是室外車載導(dǎo)航的重要手段,但在衛(wèi)星信號缺失或遮擋嚴(yán)重情況下無法進(jìn)行有效導(dǎo)航,融合慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)可解決上述問題,因此GNSS/INS組合導(dǎo)航定位技術(shù)是導(dǎo)航領(lǐng)域的研究熱點(diǎn)。GNSS/INS組合導(dǎo)航包括松組合和緊組合,緊組合可有效利用原始信息輔助GNSS整周模糊度的固定,具有更突出的優(yōu)勢。基于載波相位差分(Real-Time Kinematic, RTK)的緊組合通常分為分散式濾波和集中式濾波兩種方法,分散式濾波先將INS預(yù)測的位置信息作為虛擬觀測方程輔助GNSS-RTK進(jìn)行模糊度固定[1-2],然后通過獨(dú)立的GNSS-RTK解算模塊輸出的位置對INS濾波器進(jìn)行量測更新,此方法的優(yōu)點(diǎn)是模塊化方式、獨(dú)立性好,缺點(diǎn)是需要兩個濾波器[3]。
GNSS模糊度固定依然是GNSS/INS緊組合中的難點(diǎn)。目前,模糊度固定大致可以分為以下三類,一類是根據(jù)信噪比[4]、高度角[5]、最優(yōu)解及次最優(yōu)解是否一致[6]進(jìn)行選星;第二類是將各頻段的模糊度分為寬巷和窄巷模糊度,優(yōu)先固定寬巷模糊度,再固定窄巷模糊度,從而得到位置固定解[7];第三類則是P.J.Teunissen在1999年提出的直接選取模糊度子集進(jìn)行固定[8-10],從而得到位置固定解。在降相關(guān)后的搜索空間內(nèi),根據(jù)成功率選取模糊度的最優(yōu)子集,進(jìn)而提高模糊度的固定率。
隨著全球衛(wèi)星導(dǎo)航系統(tǒng)的快速發(fā)展,可視衛(wèi)星數(shù)大大增加,為用戶定位提供了更多冗余觀測,能顯著提升定位精度和可靠性。但是隨著衛(wèi)星數(shù)增加,模糊度個數(shù)也隨之增多,模糊度固定難度加大,尤其是在動態(tài)環(huán)境下難以固定全部的模糊度,而固定部分模糊度能到達(dá)更好的效果。
本文對部分模糊度固定算法在RTK/INS(下文統(tǒng)一用RTK/INS來表述GNSS RTK/INS)緊組合中的定位性能進(jìn)行了分析,該方法可以有效地解決模糊度個數(shù)偏多與模糊度浮點(diǎn)解方差差異明顯的問題,有效地提升了模糊度固定率和組合導(dǎo)航定位精度,在此基礎(chǔ)上對實(shí)測車載動態(tài)數(shù)據(jù)進(jìn)行了分析,驗(yàn)證了基于部分模糊度固定的RTK/INS緊組合的定位性能。
1 GNSS RTK/INS緊組合模型
1.1 RTK觀測方程
RTK/INS緊組合Kalman濾波使用接收機(jī)的原始觀測值,分別在站間和星間求差,并構(gòu)建雙差方程,作為Kalman濾波的觀測量。
對于短基線,可以通過雙差較好地消除對流層和電離層誤差,其對應(yīng)的載波相位和偽距雙差觀測方程為
(1)

1.2 RTK/INS分散式濾波框架
2016年,李團(tuán)提出了模糊度獨(dú)立解算的RTK/INS緊組合框架,該方法依然擁有兩個濾波器,分別為組合濾波器和GNSS解算濾波器[11]。與傳統(tǒng)的松組合不同之處在于,此模式依然采用GNSS原始觀測值,只是將INS提供的先驗(yàn)信息作為虛擬觀測方程參與GNSS的測量更新中,避免了由于擴(kuò)充GNSS模糊度帶來的待估參數(shù)的增加,穩(wěn)定性好;并且因?yàn)槔昧薎NS提供的先驗(yàn)位置信息,可以有效地縮小待估模糊度參數(shù)的搜索空間,從而提高了模糊度固定率,該緊組合框架如圖1所示。
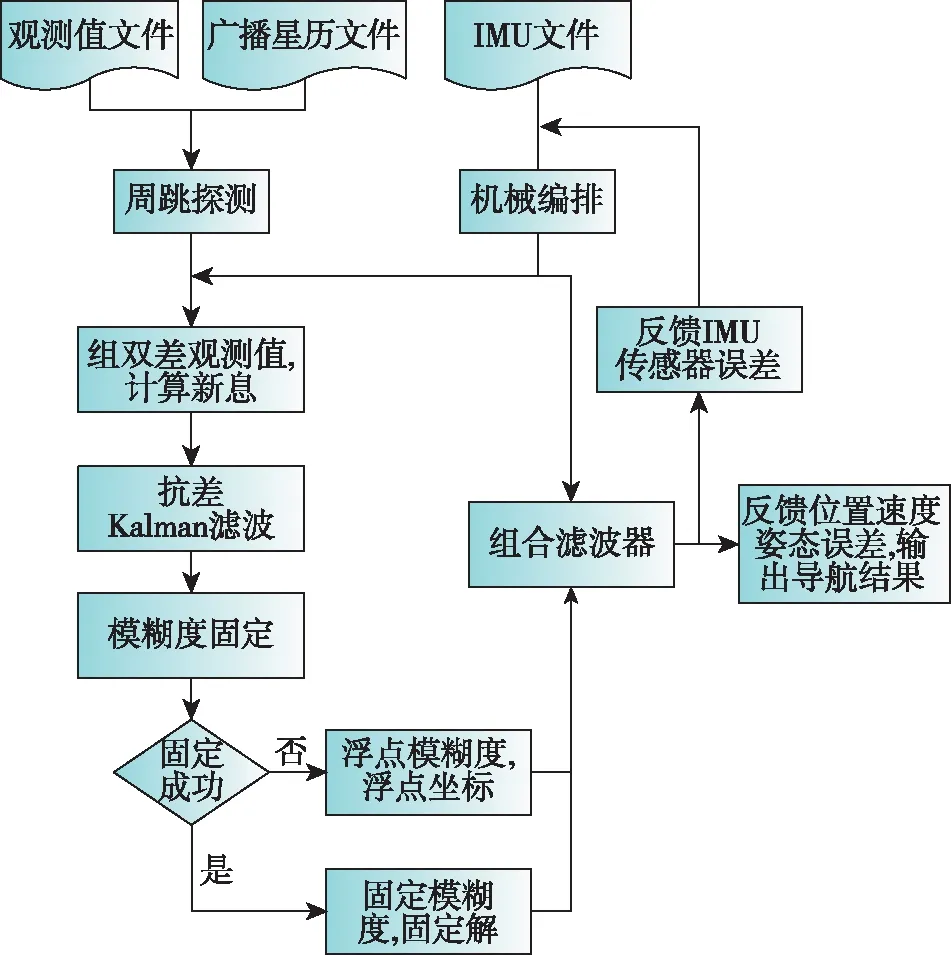
圖1 分散式的RTK/INS緊組合框架
1.3 RTK/INS組合濾波器
為了實(shí)現(xiàn)RTK/INS緊組合必須建立相應(yīng)的誤差狀態(tài)模型,首先需要建立慣性導(dǎo)航系統(tǒng)在地心地固(Earth-Centered, Earth-Fixed, ECEF)坐標(biāo)系(E系)下的誤差狀態(tài)模型。建模如下
(2)

(3)

(4)
式中,xINS為與慣導(dǎo)相關(guān)的誤差狀態(tài)量;F為系統(tǒng)矩陣;G為驅(qū)動噪聲陣;w為驅(qū)動白噪聲。
再利用GNSS解算的位置更新INS狀態(tài)量,濾波的觀測量為INS推算的位置與GNSS解算的位置之差。
1.4 INS輔助模糊度固定方法
由于INS在短期導(dǎo)航中具備較高的定位精度,且具有連續(xù)定位的能力,通過加入INS提供的先驗(yàn)位置信息,以約束方程的方式提高模糊度的浮點(diǎn)解精度,從而提升定位精度。
從INS機(jī)械編排模塊可以得到位置、速度和姿態(tài)的信息,再通過桿臂將INS處的位置推導(dǎo)GNSS天線相位中心處的位置及其方差,對應(yīng)的公式如下

(5)
(6)

由INS推導(dǎo)得到GNSS天線相位中心處的位置參數(shù)及其方差,則對應(yīng)的虛擬觀測方程可以表示為
(7)
2 部分模糊度固定策略
對于短基線解算而言,可以將未知參數(shù)分為兩類:基線坐標(biāo)和雙差模糊度[13]。線性化后的雙差觀測方程簡寫成如下的形式
y=Bb+Aa+e
(8)
式中,y表示觀測值與計(jì)算的雙差載波相位觀測值或者雙差偽距之差(Observations Minus Calculations,OMC),y∈Rm;b表示基線向量的坐標(biāo)增量矩陣;a表示n個雙差模糊度參數(shù);B表示基線坐標(biāo)前的設(shè)計(jì)矩陣;A表示模糊度參數(shù)項(xiàng)前的設(shè)計(jì)矩陣;e表示模型計(jì)算的殘余誤差和測量噪聲。
根據(jù)式(8)可以解算得到模糊度參數(shù)和其他參數(shù)的浮點(diǎn)解X及其對應(yīng)的方差協(xié)方差矩陣
(9)
通過式(9)可以獲得原空間的浮點(diǎn)模糊度及其方差,將原空間的浮點(diǎn)模糊度的方差作為輸入,利用LAMBDA算法將原始空間的模糊度及其方差轉(zhuǎn)換為新空間內(nèi)的模糊度矢量和對應(yīng)的方差-協(xié)方差矩陣
(10)

(11)
其中
(12)
式(12)只計(jì)算一個模糊度成功率。在部分模糊度算法中,先預(yù)設(shè)一個成功率閾值,據(jù)此來挑選相關(guān)后的模糊度子集的最優(yōu)解。依次選擇最小方差的模糊度參數(shù),計(jì)算相應(yīng)的累積成功率,直到小于成功閾值或者所有的模糊度參數(shù)都滿足要求
(13)

(14)
(15)
(16)
再通過模糊度反饋即可獲得部分模糊度固定對應(yīng)的坐標(biāo)固定解。
如果所挑選的模糊度子集無法通過Ratio Test時,則依次剔除該子集中方差最大的模糊度參數(shù),再進(jìn)行模糊度檢驗(yàn),直到ratio test成功或者所挑選的模糊度的個數(shù)小于給定閾值,若模糊度個數(shù)小于給定閾值時則判定為模糊度固定失敗。
3 實(shí)驗(yàn)分析
3.1 開闊環(huán)境下的實(shí)驗(yàn)驗(yàn)證
數(shù)據(jù)采集于2018年1月19日,移動站GNSS接收機(jī)為Trimble NetR9,采用的慣性器件參數(shù)如表1所示。采集地點(diǎn)為湖北省武漢市江夏區(qū)的郊區(qū),如圖2所示,觀測環(huán)境較佳,高樓、高架和樹木遮擋區(qū)域較少。GNSS接收機(jī)的采樣率為1Hz,雙頻觀測值,觀測衛(wèi)星數(shù)較多,包含靜態(tài)和動態(tài)兩種場景。本組數(shù)據(jù)的采集時長大約150min,基線長度在12.4~14.9km范圍波動,慣導(dǎo)的輸出頻率為200Hz,本文以商用軟件GINS的輸出作為參考結(jié)果,以測試本論文算法的可行性。本文組合導(dǎo)航相關(guān)的實(shí)驗(yàn)除了模糊度處理策略不同外,其余算法均一致。
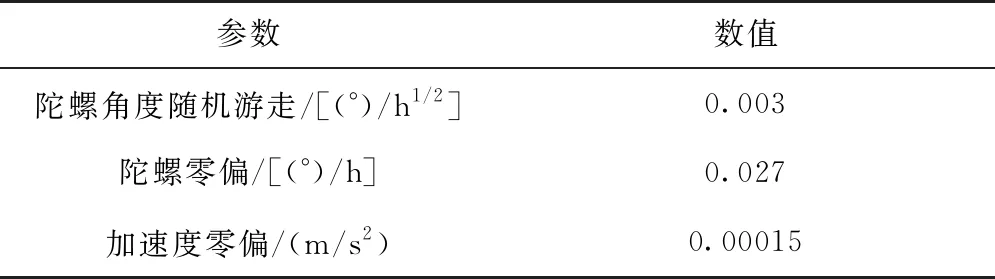
表1 慣性器件參數(shù)表
第一組數(shù)據(jù)的采集環(huán)境如圖2所示。

圖2 車載實(shí)驗(yàn)數(shù)據(jù)采集路線
該區(qū)域位于郊區(qū),視野開闊,觀測環(huán)境較佳,適合驗(yàn)證本算法在開闊環(huán)境下的定位性能,圖3所示為該天數(shù)據(jù)采集階段的可視衛(wèi)星情況。
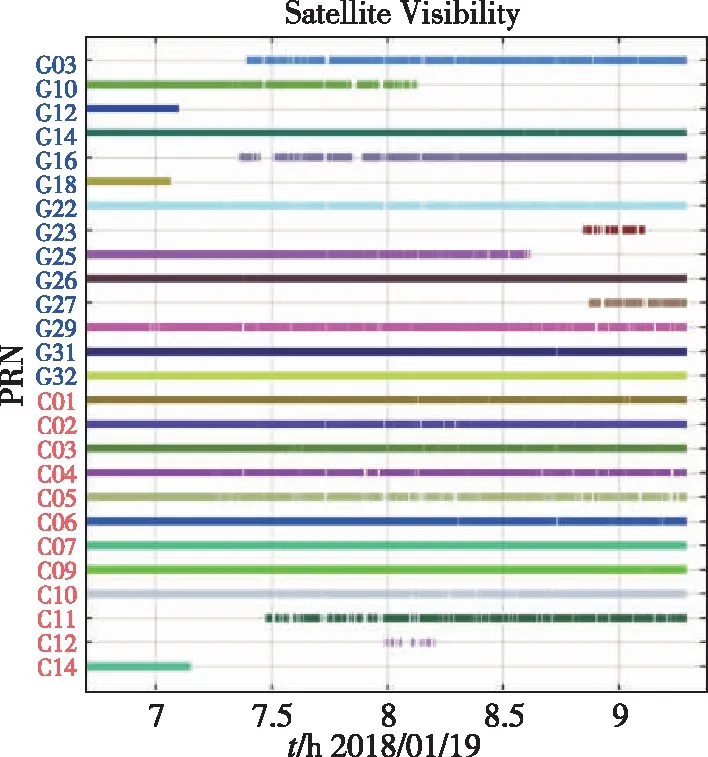
圖3 移動站可視衛(wèi)星圖
為了驗(yàn)證基于部分模糊度固定的RTK/INS緊組合算法,本文擬從以下四個實(shí)驗(yàn)思路進(jìn)行分析:1)全模糊度固定的RTK算法;2)基于部分模糊度固定的RTK算法;3)基于全模糊度固定的RTK/INS緊組合算法;4)基于部分模糊度固定的RTK/INS緊組合算法。對應(yīng)的定位結(jié)果如圖4~圖7所示,其對應(yīng)的定位精度及模糊度固定率如表2所示。
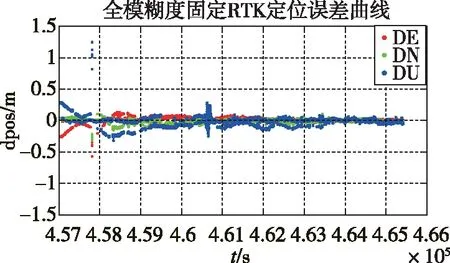
圖4 全模糊度固定RTK定位誤差曲線
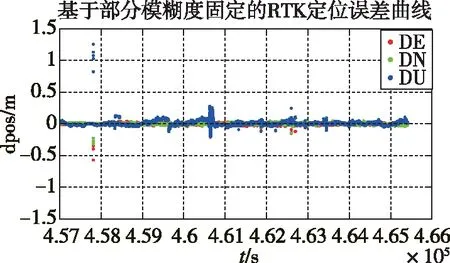
圖5 部分模糊度固定RTK定位誤差曲線

圖6 全模糊度固定RTK/INS定位誤差曲線
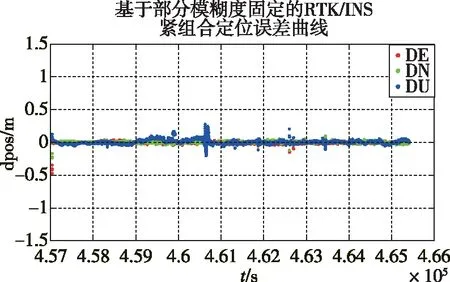
圖7 基于部分模糊度固定RTK/INS定位誤差曲線
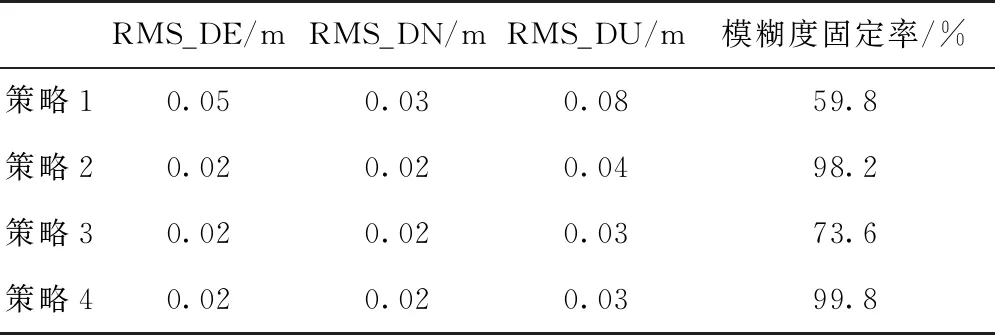
表2 開闊環(huán)境下不同解算策略對應(yīng)的定位精度及模糊度固定率
上述的結(jié)果顯示,在開闊環(huán)境下,基于全模糊度固定的定位精度大約是基于部分模糊度固定算法的一半,可以看出部分模糊度能夠有效地提升模糊度的定位精度。同時部分模糊度的模糊度固定率高于全模糊度固定的RTK/INS緊組合算法的模糊度,但是RTK/INS的定位精度與其保持一致,說明INS能夠有效地提升定位精度及其有效性。策略3和策略4的模糊度固定率相差了26.2%,因而部分模糊度固定算法對于開闊環(huán)境這種衛(wèi)星數(shù)較多的場景,可以有效地提升其模糊度固定率。定位的精度與固定的模糊度個數(shù)有關(guān),相同歷元全模糊度固定成功的定位精度比部分模糊度固定成功的定位精度及可靠性高。也可以看出加入了INS后,定位精度提升了50%以上,并且模糊度固定率也提升了13.8%。
從圖4可以看出,其中有部分的定位結(jié)果出現(xiàn)了米級的異常,該部分的原因是因?yàn)榘l(fā)生了真實(shí)的周跳,而對于發(fā)生了周跳的衛(wèi)星,在接下來的5個歷元內(nèi)不固定其模糊度。如圖8所示,以G31衛(wèi)星為例可以看出,在該歷元MW組合發(fā)生了較大的突變,本文只畫出了G31衛(wèi)星的MW組合圖,其他衛(wèi)星在該歷元也均發(fā)生了周跳。
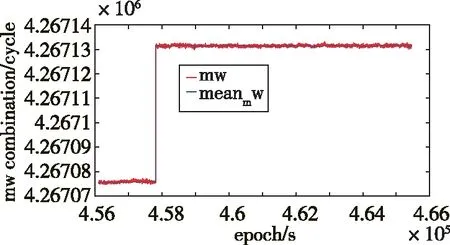
圖8 G31衛(wèi)星的MW組合單歷元MW模糊度及平滑后的MW模糊度
并且從圖4和圖5可以看出,兩個誤差曲線在61min左右出現(xiàn)了相同的突刺,并且從表2可知,基于部分模糊度固定的RTK/INS緊組合的模糊度固定率達(dá)到了99%,所以不難得出該處出現(xiàn)了錯誤的模糊度固定。模糊度確認(rèn)在RTK及RTK/INS的組合導(dǎo)航中均發(fā)揮著重要的作用,后期應(yīng)該對此進(jìn)行相應(yīng)的研究,以提升模糊度確認(rèn)的可信度。
對比全模糊度固定和部分模糊度固定的結(jié)果可以看出,在開闊環(huán)境下,部分模糊度固定RTK/INS緊組合算法與全模糊度固定RTK/INS緊組合算法的性能相當(dāng),并且當(dāng)選擇部分模糊度固定策略時,應(yīng)該對最少固定的模糊度個數(shù)閾值進(jìn)行測試。當(dāng)選擇固定越少的模糊度參數(shù)時,其模糊度固定率越高,但是因?yàn)槟:葏?shù)太少,其對位置的修正效果越不明顯,并且存在模糊度固定失敗的風(fēng)險(xiǎn)。
3.2 城市環(huán)境下的實(shí)驗(yàn)驗(yàn)證
第二組測試數(shù)據(jù)采集于從佛祖嶺到武漢大學(xué)的復(fù)雜城區(qū),該區(qū)域?yàn)槲洳齾^(qū)內(nèi)的城市環(huán)境,包含多條隧道,包括東湖隧道等較長的隧道,因而較多時段均存在衛(wèi)星信號失鎖的情況,觀測到的衛(wèi)星數(shù)較少,經(jīng)常出現(xiàn)無法滿足差分解算的衛(wèi)星個數(shù)的現(xiàn)象。在此觀測環(huán)境下,觀測衛(wèi)星的質(zhì)量較差,定位性能受到了較大影響。本次實(shí)驗(yàn)采用的慣導(dǎo)與第一組一致,采集時間為2018年7月20號,數(shù)據(jù)采集時長約2h,基線長度為0.1~13.2km,圖9~圖13所示為一些具體的測試環(huán)境,圖14和圖15所示為復(fù)雜環(huán)境下衛(wèi)星可視情況。
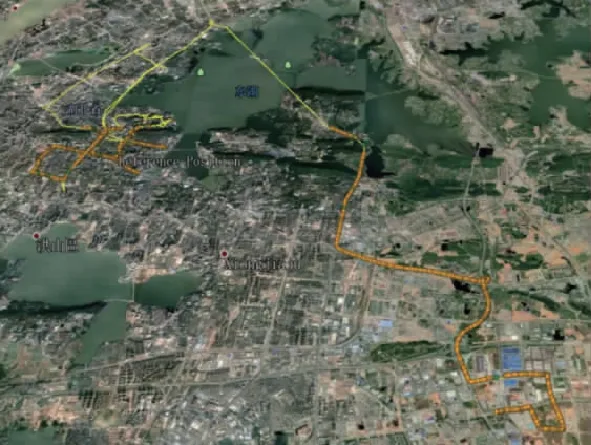
圖9 20180720復(fù)雜場景路線

圖10 樹木遮擋區(qū)域

圖11 隧道

圖12 高架
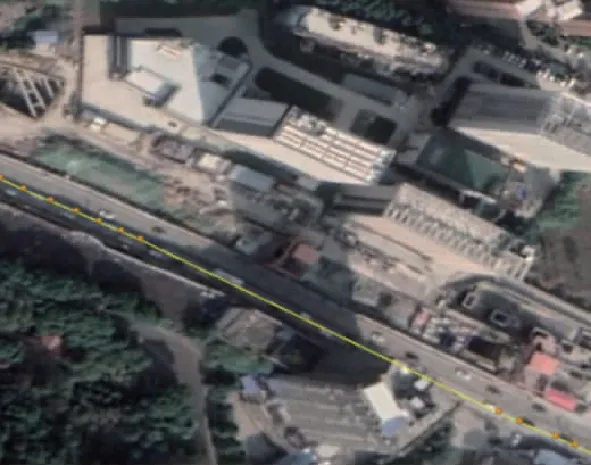
圖13 高層建筑
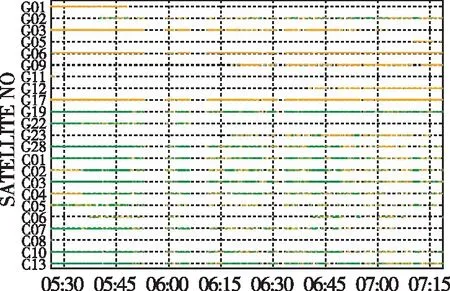
圖14 20180720復(fù)雜場景測試數(shù)據(jù)的衛(wèi)星可視圖
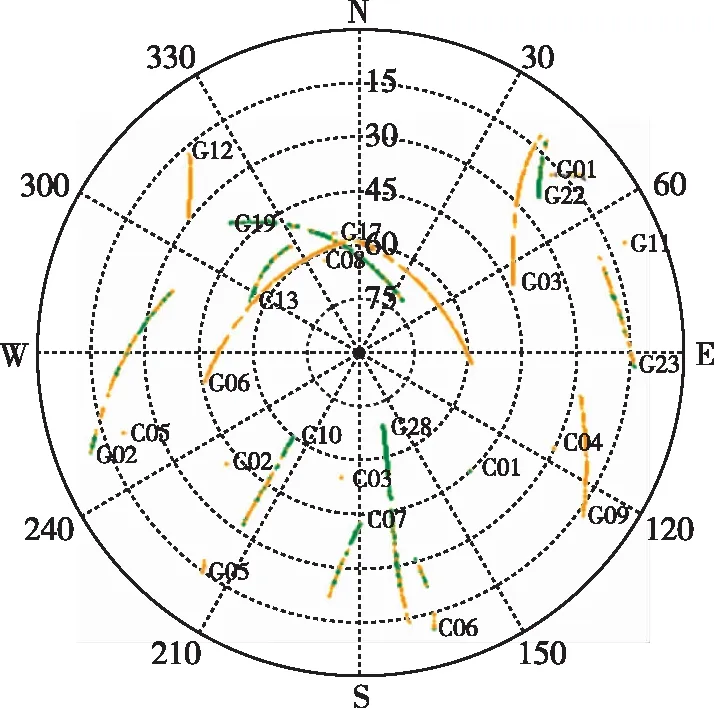
圖15 20180720復(fù)雜場景測試數(shù)據(jù)的天空圖
為了驗(yàn)證基于部分模糊度的RTK/INS緊組合算法,本文擬從以下四個實(shí)驗(yàn)思路進(jìn)行分析:1)全模糊度固定的RTK算法;2)基于部分模糊度固定的RTK算法;3)基于全模糊度固定的RTK/INS緊組合算法;4)基于部分模糊度固定的RTK/INS緊組合算法。對應(yīng)的定位結(jié)果如圖16~圖19示,其對應(yīng)的定位精度及模糊度固定率如表3所示。
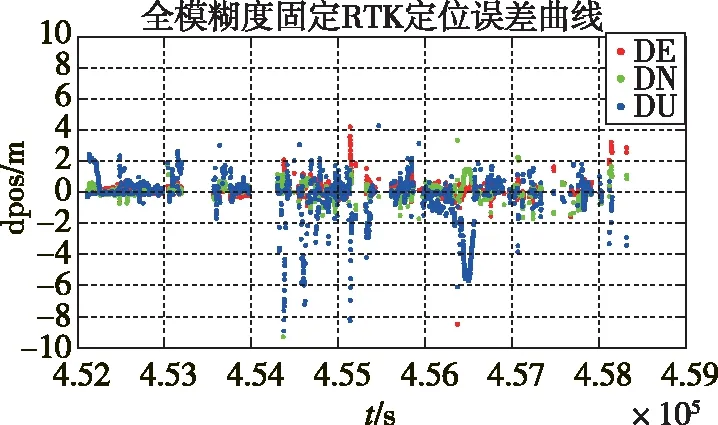
圖16 全模糊度固定RTK定位誤差曲線
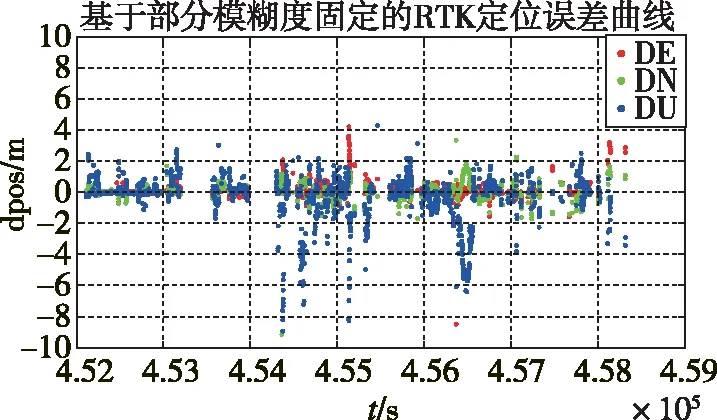
圖17 基于部分模糊度固定RTK定位誤差曲線
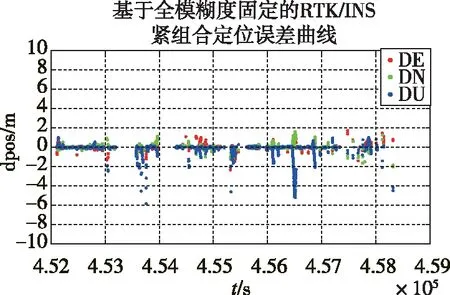
圖18 基于全模糊度固定的RTK/INS緊組合定位誤差曲線
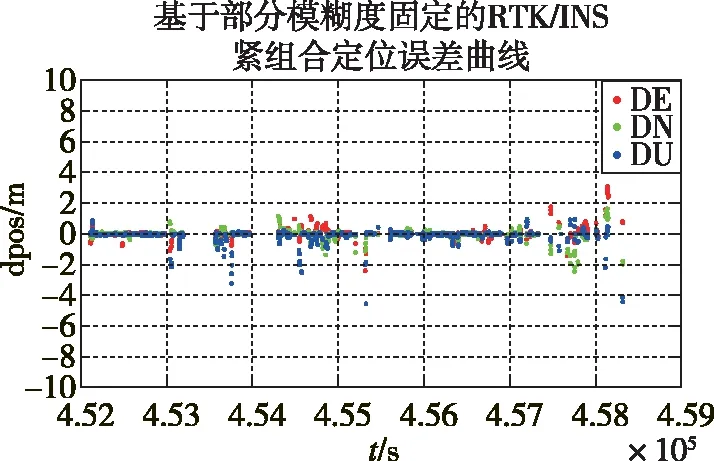
圖19 基于部分模糊度固定的RTK/INS緊組合定位誤差曲線
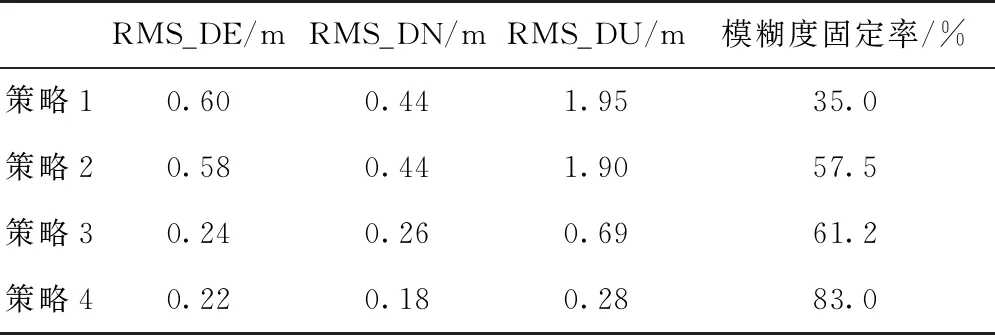
表3 城市環(huán)境下不同解算策略對應(yīng)的定位精度及模糊度固定率
對比圖16和圖17可以看出,雖然通過部分模糊度提升了整體的模糊度固定率,但是隨著參與解算的模糊度越少,相位觀測值對整體定位精度的影響也相應(yīng)降低。加入了INS后,在U方向有較大的提升,提升效果大于50%,在純RTK狀態(tài)下,E、N的誤差為0.6m和0.44m,而U方向達(dá)到了1.95m,可以看出加入INS之后,E、N方向的定位誤差穩(wěn)定在0.3m以下,U方向的定位誤差減小至0.7m以下。策略3和策略4相較于策略1分別提升了1.26m和1.67m,模糊度固定率也提升了1.74倍和2.34倍,定位結(jié)果的曲線相較其他幾種模式定位誤差變化更加平緩。對比圖16和圖18、圖17和圖19可以看出,RTK/INS緊組合可以有效地改善GNSS模糊度未固定條件下的位置精度,有效地修正了對應(yīng)的位置誤差,在復(fù)雜環(huán)境下的定位效果較佳,但是面對長隧道和GNSS信號失鎖過長的情況,其定位精度依然較差。
從圖18和圖19可以看出,加入了INS后,在圖20第四處GNSS數(shù)據(jù)中斷時,有部分的組合后結(jié)果低于非組合的結(jié)果,由分析數(shù)據(jù)可以看出,第四處中斷最長時長為50多秒,且該處出現(xiàn)了數(shù)次衛(wèi)星失鎖,導(dǎo)致無法利用GNSS解算位置。以第四處數(shù)據(jù)中斷為例,查看策略3中在沒有GNSS衛(wèi)星環(huán)境下的INS位置誤差曲線。
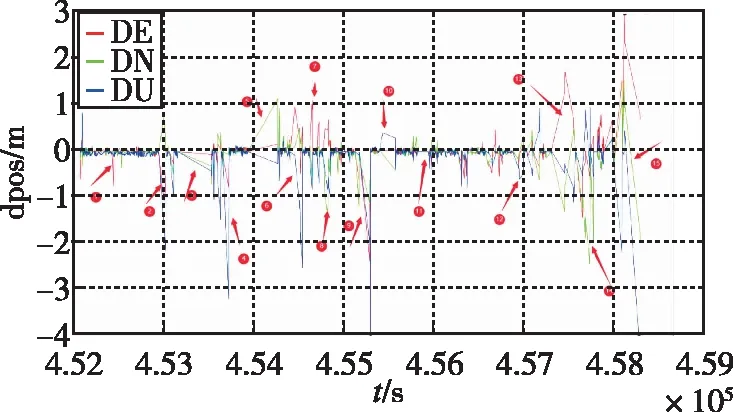
圖20 長時段的數(shù)據(jù)中斷區(qū)域
對比圖16和圖18可以看出,在部分衛(wèi)星連續(xù)失鎖的環(huán)境下,GNSS觀測值首次符合差分定位條件時,INS輔助下的RTK定位精度低于常規(guī)RTK的定位精度,如圖18中的第一次長時間失鎖以及整個數(shù)據(jù)的最后一個部分,這與GNSS衛(wèi)星信號失鎖時長有關(guān)。從圖21可以看出,330s的純慣導(dǎo)INS推算,N方向發(fā)散了2.8m,U方向發(fā)散3.4m,E方向發(fā)散了0.1m,隨著時間的推移,E、N、U方向的誤差積累更快。故在GNSS信號滿足定位要求時,GNSS的定位結(jié)果可以有效地抑制INS誤差的發(fā)散,但是也存在INS結(jié)果拉偏GNSS觀測值的風(fēng)險(xiǎn),這與本文采用的Kalman濾波中的Q陣設(shè)置有關(guān),導(dǎo)致INS推導(dǎo)得到的方差信息與RTK解算的位置方差之間不匹配。
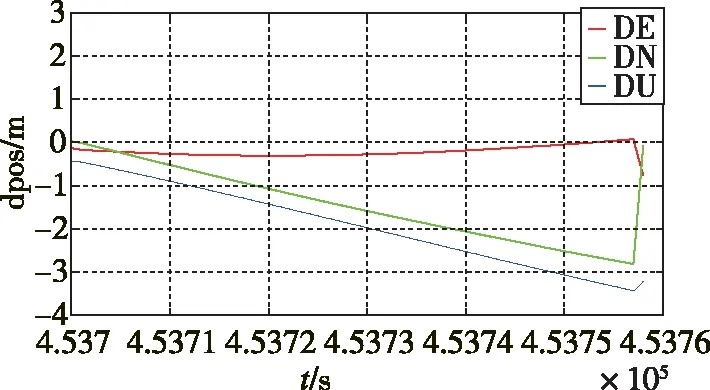
圖21 長時段數(shù)據(jù)中斷區(qū)域的ENU發(fā)散情況
對比圖18和圖19可以看出,在城市環(huán)境下,部分模糊度固定RTK/INS緊組合算法性能明顯優(yōu)于全模糊度固定RTK/INS緊組合算法,并且當(dāng)選擇部分模糊度固定策略時,其模糊度固定率大大提升,定位結(jié)果也得到了明顯提高。因?yàn)榘殡S著衛(wèi)星的失鎖與周跳,不同衛(wèi)星模糊度的精度也不一樣,如果固定所有衛(wèi)星的模糊度參數(shù),則很可能固定不成功,故固定部分模糊度參數(shù)可以有效提升定位精度。從定位精度上看,部分模糊度算法較全模糊度固定算法的E方向提升了8%、N方向提升了31%、U方向提升了60%,且模糊度固定率提升了21.8%,從而證明了部分模糊度固定算法的有效性。
4 結(jié)論
本文針對RTK/INS緊組合中模糊度固定問題,提出了基于部分模糊度固定的緊組合算法,分析了RTK、RTK/INS緊組合和采用了部分模糊度算法的RTK/INS緊組合在不同實(shí)驗(yàn)場景下的定位能力。
1)在開闊環(huán)境下,RTK本身的E、N、U方向均可達(dá)到cm級,在加入了INS后,其定位精度、定位穩(wěn)定性及模糊度固定率有所提升,但是對整體的定位精度的提升不是特別明顯,E 方向提升了3cm,N方向提升了1cm,U方向提升了5cm。但是從整體上看,定位誤差曲線趨于平緩,具有更好的魯棒性,同時對比部分模糊度固定和全模糊度固定方法的定位精度,兩者并無明顯差異。
2)在城市環(huán)境下,由于移動站所處的觀測環(huán)境受到高層建筑、樹木等城市峽谷環(huán)境的影響,導(dǎo)致觀測的衛(wèi)星數(shù)量減少,也可能存在長時間的衛(wèi)星信號失鎖等問題,這些都會對整體的模糊度固定帶來不利影響。實(shí)驗(yàn)結(jié)果表明,在觀測數(shù)據(jù)較少的情況下,INS輔助下的模糊度固定率提升了26.1%以上,三方向的定位精度的提升均超過了40%,但是整體的定位精度依然是分米級,這與整體的觀測環(huán)境有關(guān),后續(xù)可能加入多源傳感器,以增加冗余觀測,進(jìn)而提升定位的精度和可靠性。并且部分模糊度固定RTK/INS緊組合算法性能明顯優(yōu)于全模糊度固定RTK/INS緊組合算法。
總之,在城市環(huán)境下,基于部分模糊度固定的RTK/INS緊組合算法整體優(yōu)于傳統(tǒng)全模糊度固定算法,E、N、U方向分別提升了8%、31%和60%;在開闊環(huán)境下,兩者精度相當(dāng)。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(bào)(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
