新能源汽車對主驅電機特性的敏感性研究*
2021-05-17 14:59:02李忠雨劉宏鑫李紅雨王國鋒
汽車實用技術 2021年8期
關鍵詞:效率
李忠雨,劉宏鑫,李紅雨,王國鋒
(珠海英搏爾電氣股份有限公司 研發中心,廣東 珠海 519000)
引言
隨著國家能源發展戰略向低碳、節能型轉移,純電動新能源汽車近年得到了快速發展,不僅可以有效緩解我國能源與環境壓力,還可以大幅度減少國民出行問題。汽車主驅電機作為電動汽車的核心部件,與整車的動力性能、運行經濟密切相關[1-2],良好的整車動力匹配方案不僅要滿足整車動力性需求,還要使得電機外特性、效率MAP、車輛運行工況三者深度耦合,才能使整車動力更充沛,能耗更經濟。
文獻[3]根據整車參數利用汽車動力匹配解析法計算出了電機的峰值功率、峰值轉矩以及峰值轉速,并通過advisor對整車進行了仿真,佐證了電機的選型、電池的容量及整車參數特性匹配是合理的,文獻[4]指出了以往對改裝車動力仿真計算的缺乏,提出了電動汽車改制的設計方法,通過電機外特性的選擇匹配,對被改制車型進行了最高車速、加速能力、爬坡性能和續航里程的仿真研究,分析表明,改制車型動力匹配是合理的;文獻[5]根據外廠提供的三款電機MAP圖,并以一輛長度為2558mm的電動汽車為研究對象,對速度特性、加速特性以及爬坡性能進行了一系列的仿真分析,得出可以通過調整傳動比來獲得良好的動力性能等結論。
綜上所述,在現有的文獻中,多數學者關于電機匹配的研究大都集中在電機對整車動力性能影響,而隨著新能源汽車數量的激增,能耗問題越來越被重視,然而關于效率MAP對整車運行的經濟性影響及其匹配的文獻少有報道。
1 動力性能匹配分析
主驅電機作為新能源電動汽車的關鍵動力部件,其運行特性直接影響著整車的加速性能、爬坡性能、最高車速、能耗等性能,對電動汽車的動力性及舒適性有著重要意義,一套好的動力系統,不僅要求電機一側要有充沛的動力輸出,更要與整車的物理參數形成深度的配合,才會全面地發揮出電機的動力潛能。本文以一臺8.5m純電動公交車為研究對象,使用由美國再生能源實驗室(NREL,National Renewable Energy Laboratory)開發的高級車輛仿真系統ADVISOR(ADvanced VehIcle SimulatOR)對其性能匹配進行深入地分析。
1.1 數學模型
Advisor采用了后向仿真為主,前向反饋為輔的前、后雙向仿真技術,如圖1所示,其整個能量流動是從道路行駛工況發起,然后依次傳遞到整車、車輪、減速器、變速器、電機、電池,然后逐級向前傳遞反饋,形成閉環仿真系統,所以具有非常高的車輛仿真精度。
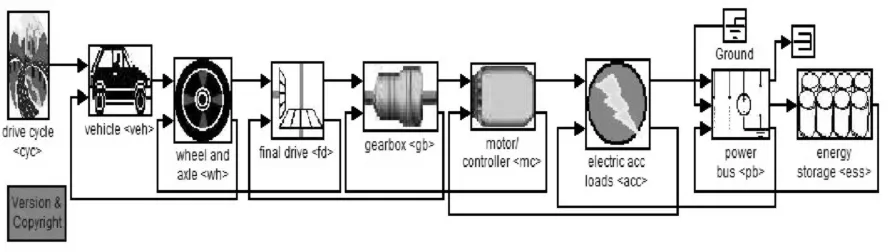
圖1 純電動車仿真系統架構
整車邏輯算法是以上一級車速請求作為系統的輸入,通過力學平衡方程(1)計算得到整車需要的牽引力和速度,并將求解得到的牽引力和速度輸出到車輪,車輪會將計算出的牽引力和極限反饋到整車作為判定,整車邏輯算法如圖2所示:

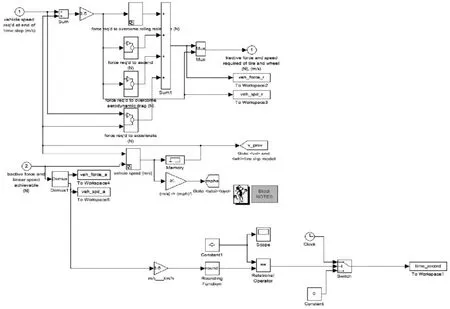
圖2 整車邏輯算法
電機邏輯算法模塊是以減速器模塊輸出的轉速和轉矩作為請求輸入,電機算法針對預置電機MAP及其外特性進行查表計算,并計算出需求的功率傳遞至電池模塊,電池模塊會依據電池實際的放電情況,計算出實際可以提供功率,并向前反饋到電機模塊處理,最終得到實際的轉矩和轉速輸出,電機邏輯算法如圖3所示。
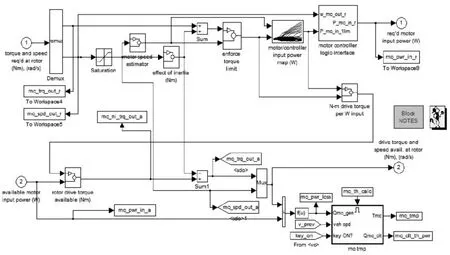
圖3 電機邏輯算法
1.2 整車物理參數
整車物理參數對于動力系統的選擇及其匹配是非常重要的參考依據,動力匹配時需要準確地列出其整車物理參數以便電機的選型和匹配,詳細參數如表1所示:
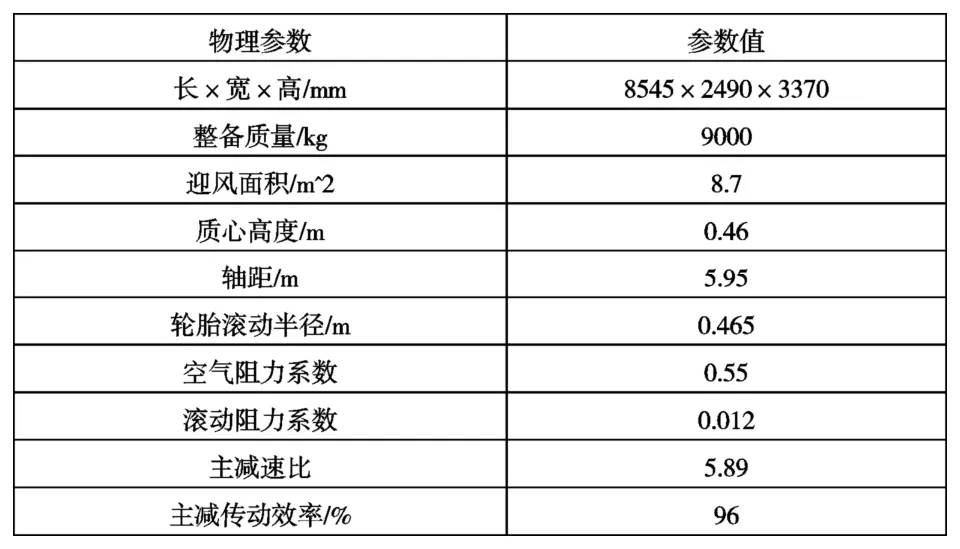
表1 整車物理參數
1.3 整車性能需求
整車性能需求是衡量動力系統是否滿足整車設計的重要指標,也是動力系統選擇的重要參考,本文中整車性能需求表如表2所示:
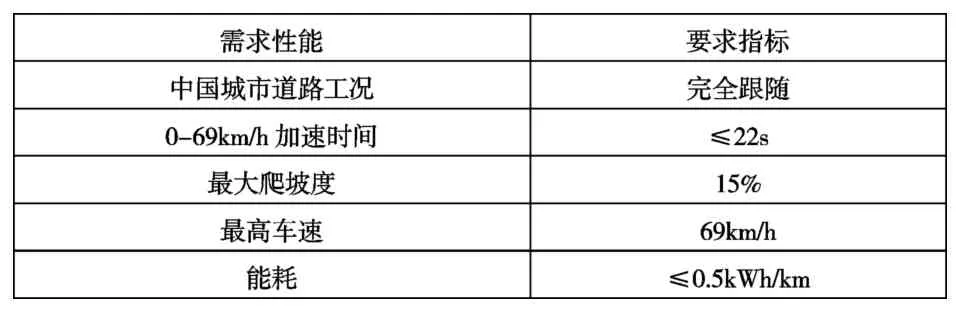
表2 整車性能需求表
NEDC工況雖然具有國際普適性,但是與我國道路交通還有較大的區別,由于我國車流量密集程度高、剎車制動頻繁、車速相對較低,所以中國城市道路工況更好地反映出我國的道路實際工況,如圖4所示。
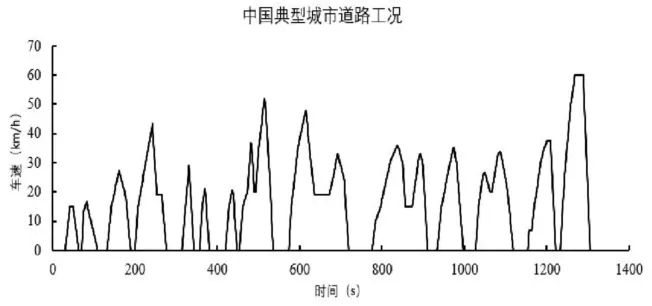
圖4 中國城市道路工況
1.4 適配電機參數
通過以上整車的物理參數及整車性能需求,選擇了一款永磁同步電機,其具體參數如下表3所示:
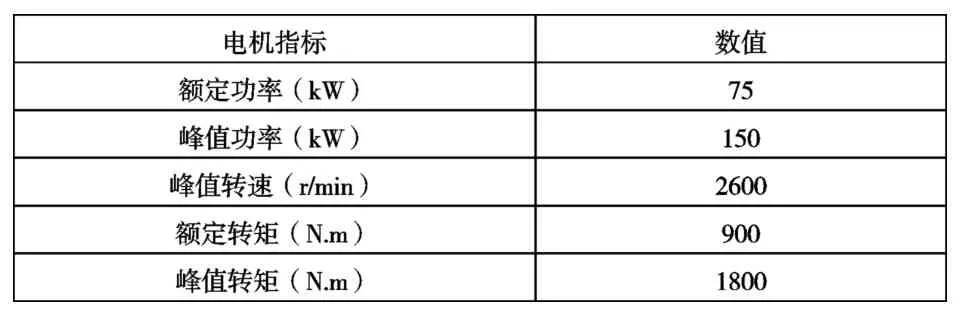
表3 電機特性
為了明確上述適配電機的各項指標能否滿足表2中對整車性能的需求,利用高級車輛仿真系統ADVISOR,對整車動力系統進行了全面地分析。
1.5 仿真結果
根據以上整車物理參數、電機特性參數及中國典型城市道路工況,利用高級車輛仿真系統ADVISOR,對整車動力性能進行了仿真計算,得到了以下運行結果。
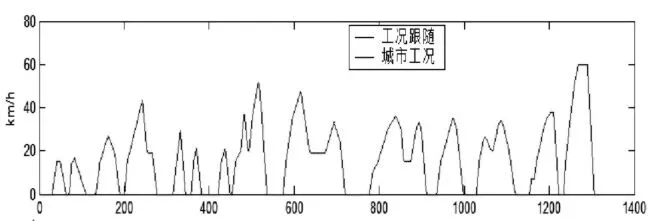
圖5 整車工況跟隨狀態
整車要求實際運行工況曲線需要與道路工況完全跟隨,不允許有延時跟隨及速度偏差現象。從圖5中可以看出,工況跟隨曲線與城市工況曲線完全重合,說明整車所適配的電機很好地滿足工況曲線跟隨,滿足匹配要求。
通過仿真結果圖6可以看出,0-69km/h加速時間計算結果為17.2s,滿足整車22s的性能需求;最高車速計算值為76.4km/h,滿足整車69km/h的車速需求,最大爬坡度計算后為15%,達到設計標準。
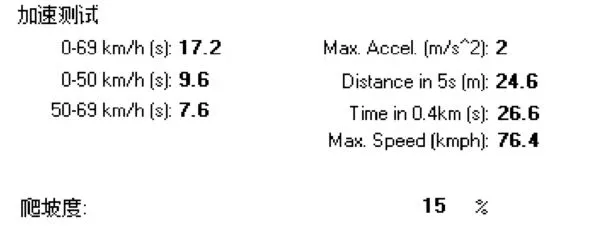
圖6 整車性能計算結果
2 能耗對電機效率MAP敏感性研究
通過以上計算結果可以看出,適配電機滿足動力性需求,但是由于新能源汽車搭載的電池數量有限,且其能量密度遠遠低于燃油車,所以對能耗及行駛里程等信息更加敏感,針對以上問題,對比分析了兩款外特性指標參數相同,但效率MAP分布不同的電機,通過兩款電機的能耗和里程的不同貢獻值,判斷出兩款電機的優劣。
2.1 不同方案下的工況分布
為了分析電機能耗及行駛里程對電機效率MAP的敏感性,分別對兩款繞組匝數、永磁體用量及MAP分布不同的電機帶入ADVISOR模塊,進行了中國典型城市道路工況的仿真,得到了工況對應的效率分布落點,如圖7、8所示。
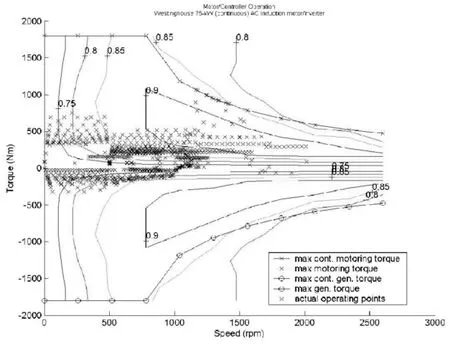
圖7 方案一效率MAP
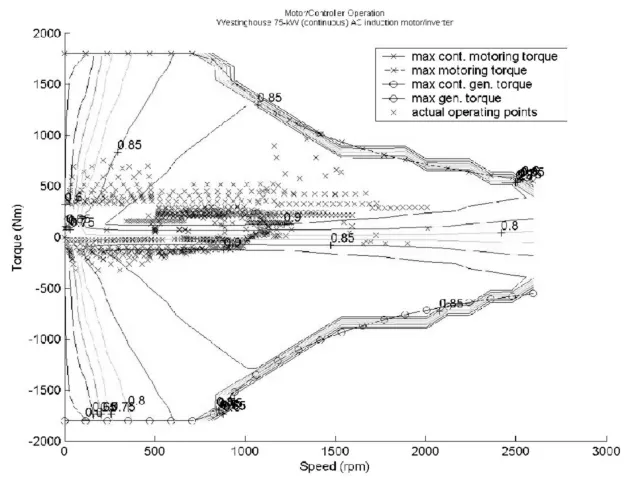
圖8 方案二效率MAP
2.2 結果分析
通過兩方案MAP分布可以看出,方案二高效區域較廣且相對靠前, 且大部分工況點落在了高效區里面,工況與電機效率MAP的高效區耦合程度更深,使得整車能耗更加經濟,兩款電機方案最終的能耗及行駛里程結果如表4所示:

表4 能耗及行駛里程對比結果
通過表4可以看出,電機方案一能耗為0.42kWh/km,電機方案二能耗為0.38 kWh/km,相差10.5%,行駛里程相差9.1%,可以看出方案二的經濟表現明顯優于方案一,更加適合中國典型城市道路工況,能耗更經濟,續航里程更遠。
3 結論
本文以一臺8.5m新能源公交大巴為例,通過搭建完整的車輛仿真模型,并對其關鍵的仿真模塊進行了細致的闡述,且在中國典型城市道路工況的基礎之上,對適配電機進行了全面的動力性能分析以及能耗分析。在動力性能方面,通過高級車輛仿真平臺ADVISOR計算結果可以看出,適配電機的峰值轉矩、峰值轉速、峰值功率及額定功率等參數的選取是合理的,滿足整車設計需求;在能耗方面,通過對比兩款參數相同而效率MAP分布不同的電機發現,整車能耗及續航里程對效率MAP分布和道路工況有很強的敏感性,佐證了驅動電機的機外特性、效率MAP、車輛運行工況三者深度耦合的重要性,為新能源汽車驅動電機的設計,提供了一定的參考。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
