深海潛浮式提升艙的結構設計及水力學計算①
2021-05-16 14:31:02黎宙
礦冶工程 2021年2期
黎 宙
(長沙礦冶研究院有限責任公司 深海礦產資源開發利用技術國家重點實驗室,湖南 長沙410012)
在深海采礦系統中,水下輸送是一個十分重要的環節。目前,常用的水下輸送方式包括連續輸送和非連續輸送兩種類型[1],其中連續輸送主要是指礦物通過管道直接從采礦車輸送至水面母船上,一般有水力、氣力提升等;非連續輸送則將礦物置于儲料倉中,通過有纜或者無纜形式輸送至水面[2]。連續輸送效率高,但布放和回收復雜,受海況條件影響較大,且幾千米長的管道對水面母船提出了很高的要求。非連續輸送則對海況的適應性高,布放和回收操作簡單,且可通過增加多個運輸艙的形式提高運輸效率。
本文以商業開采為背景,基于非連續輸送的思想,提出了一種無人無纜式的潛浮式提升艙,通過對輸送系統功能分析,提出了一種單運輸主體+多附體的結構,并對提升艙水平和豎直運動狀態下的流體力學性能進行了仿真分析。
1 總體方案設計
1.1 功能需求分析
潛浮式提升艙作為一種從深海水下作業平臺至水面母船的礦物運輸工具,其主要性能如圖1所示。

圖1 潛浮式提升艙系統功能構成簡圖
1.2 總體結構設計
根據潛浮式提升艙的功能需求和相關分析,得到其總體輸運方法如圖2所示。

圖2 潛浮式提升艙總體設計
潛浮式提升倉整體外形為流線型,盡量減小其在運動過程中所受的水阻力;前端具有流線形整流罩,具有調節浮力的功能;料倉為透水結構設計,分別與進料口和排料口相連,可避免受海底高壓環境影響;電池倉和控制倉通過連接構件分別連接于主體側下方,均具有調節浮力的功能,同時為主體提供支撐,其上布有接地壓力傳感器,用于感知提升艙的接地和物料裝載狀態;主體上方布置有導航引導倉,為提升艙水下的運動和水下對接提供指引;提升艙尾部均布有4個螺旋推進器,為物料向海面運輸提供動力,側面推進器主要用于布放回收和水下進料口對接時姿態的調整[3-4]。
1.3 作業模式
潛浮式提升艙的功能是由水下作業平臺至水面母船之間的物料運輸,如圖3所示,其作業過程可分為如下4個階段:甲板布放,水下運輸,物料裝載和甲板回收。其中水下運輸包括提升艙在甲板布放后由海面到水下平臺的運動過程以及提升艙裝載物料完成后返回水面的過程。水下運輸過程中,提升艙保持豎直向上的運輸姿態,有利于減小其所受的水阻力。在海底和海面,基于布放、回收以及水下對接的要求,提升艙還需要有水平運動的要求。
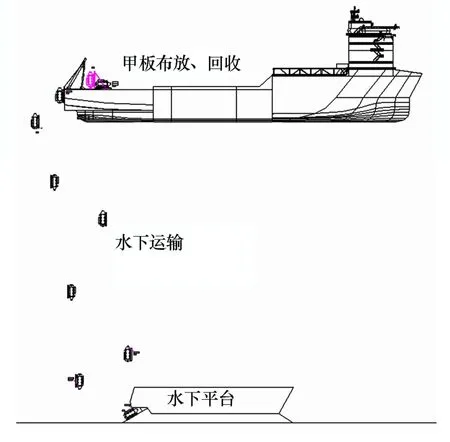
圖3 潛浮式提升艙作業模式
2 水力學計算
相對于其他水下載人或者觀測型潛水器,潛浮式提升艙更側重于承載能力和運動速度的功能,而對于其水下作業和操作性能要求相對較低,故綜合考慮潛浮式提升艙在水中的力學行為關系到提升艙在水中的運動阻力、運動過程中的穩定性、運動控制的策略選擇和控制算法的實現,有助于實現提升艙的最大運輸效率。
潛浮式提升艙在水下工作時面臨著惡劣的海底環境、復雜的海底地形地貌和激烈的深海海流,需要完成諸如水下平臺對接、原地回轉等靈活操縱運動,這都要求潛浮器具有良好的操縱性能和控制能力。從水動力角度看其主要特點是:①深海海底條件復雜,海流和海底地形條件難以預測,出于安全性考慮,操縱運動和控制上需要更為準確的水動力支持;②不同于一般潛水器,潛浮式提升艙體積和質量較大,為提高輸運效率,需保持一個穩定經濟的航速,且不能太低,故提升艙總阻力中的黏性阻力和慣性阻力均需進行詳細分析。
2.1 計算模型
在數值計算中,物體結構越復雜,體積越大,所需網格數量就越多,且網格質量難以保證;同時對計算機硬件要求也越大,所需計算時間也越久。因此,為了提高計算精度、提高網格劃分質量、加快數值計算的速度,將結構復雜的提升艙進行簡化建模,按照1∶1的比例于深海流場中進行數值模擬,通過對提升艙結構和功能進行分析后,將簡化模型定義為如下3個部分:主體、連接附件和附體部分(見圖4)。由于提升艙在水下進行物料運輸時,其作業姿態為豎直向上或向下,且在深海中,海流速度很小,基本可忽略,故對此種情況不同運動速度下的水阻力進行數值分析[5]。

圖4 提升艙計算模型
2.2 計算域的劃分
由于提升艙為左右對稱結構,為節省計算資源、提高計算速度和精度,采用1/2模型進行計算,所建立的提升艙計算域如圖5所示,設定其長、寬、高分別為L、B和H,則計算模型到速度入口距離為2L,到壓力出口距離為4L,到上下壁面距離為2H,到側面壁面距離為2B,使流場能在此計算域內充分發展,以保證計算準確性。

圖5 提升艙計算域
2.3 網格劃分
由于連接附件外表相對較復雜,存在曲面等特征,故采用非結構網格的劃分方法。為獲得精確的計算結果,模型外表面采用邊界層網格結構,層數為8;計算域內采用自動六面體網格生成方式,生成的網格如圖6所示,網格數量約為340萬,網格質量最小為0.6,平均網格質量達到0.9以上。整個計算域采取多重網格加密的形式,在網格基本尺寸0.1 m條件下,分別按基本尺寸的50%、150%和250%作為3個加密區域的網格尺寸,使從模型表面到外邊界層的網格由密到疏,實現網格大小逐步過渡,在達到良好的計算精度的同時節約計算資源、加快計算速度。同時在后處理過程中,模型附近密集的網格點分布有利于更好地觀察其周邊流場變化情況。
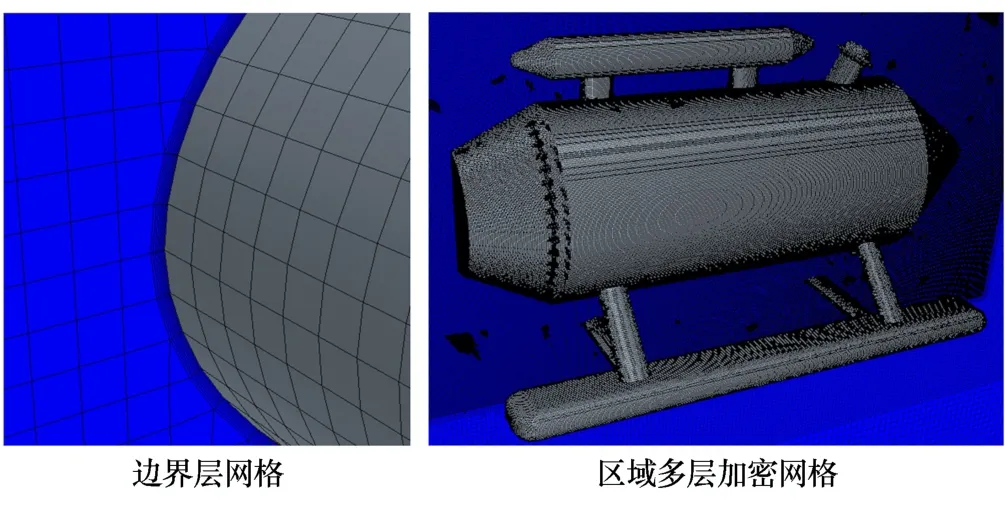
圖6 網格劃分
2.4 邊界條件及計算模型選定
對計算域設置邊界條件如下:
速度入口:模型向前2.5B,設定速度大小值為提升艙運動時的運行速度V,通過設定湍流強度與特征長度識別;
壓力出口:模型尾部向后4B為壓力出口,P=1.01×105Pa;
壁面條件:模型外表面,無滑移;外場為滑移壁面;
對稱面:垂直于對稱面的速度分量Vn=0,平行于對稱面的速度分量的法向導數為零;
外場:距離模型表面高約2H,長為3L,速度為受擾動的主流區速度。
物理模型選用分離求解器,選用realizablek?ε湍流模型和雷諾平均湍流模型[6]。選取海水密度為1 010 kg/m3,動力黏度為1.3131×10-3Pa·s。
2.5 計算結果分析
提升艙在水中運動受海流速度、提升艙承載物料質量和浮力等因素影響,其速度在不同運動階段不為一定值,故綜合考慮提升艙整體作業情況,參考現有海洋勘探調查水下裝備的運動速度,選擇其速度計算范圍為0.2~1.5 m/s。采用對稱面的計算方法,邊界入口速度分析分別設定為0.2、0.4、0.6、0.8、1.0、1.2、1.5 m/s,研究提升艙在不同速度下的水阻力變化。
圖7 為提升艙運動速度1 m/s時對稱面和底面的壓力變化云圖。可見提升艙前端壓力呈梯度變化,壓力隨著與壁面距離減小而逐漸增大,最大可達555.9 Pa,物料接口處存在壓差分離現象,提升艙的前方、本體部分及后方分別處在3個不同的壓力環境下。
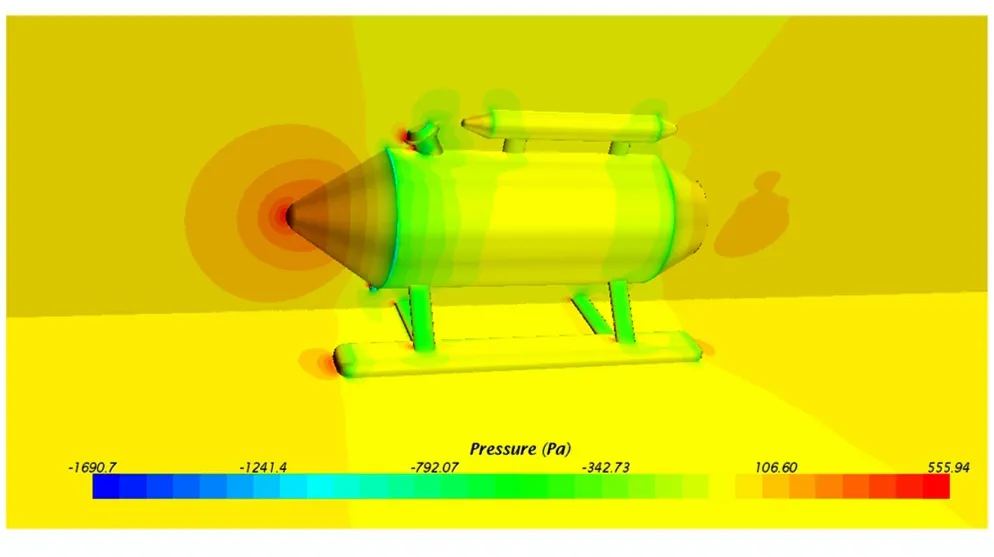
圖7 提升艙對稱面及底面壓力變化云圖
圖8 為提升艙運動區域湍流黏度變化情況。可見在提升艙尾部存在很明顯的湍流黏度變化,物料進口存在一定的湍流情況,電池倉和控制倉相對于主體湍流變化不明顯。
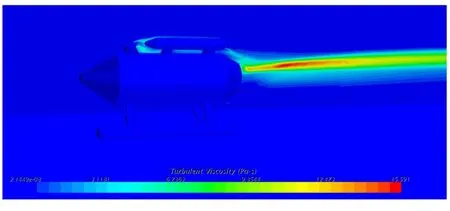
圖8 提升艙湍流黏度變化云圖
圖9 為流場域內提升艙周圍的速度場分布。可見流體在經過主體后,產生明顯的速度分離現象;料倉出口端存在明顯的低速區域。
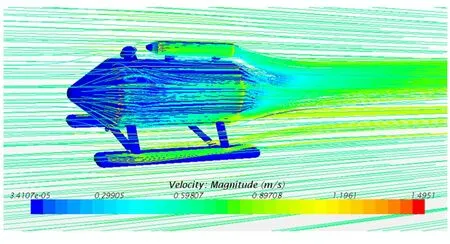
圖9 提升艙周圍速度流線圖
圖10 為提升艙主體阻力分布情況。可見提升艙阻力隨速度增大而增大;在阻力組成中,以壓差阻力為主,因為提升艙主體所占迎水面較大,黏性阻力在主體阻力中只占很小的一部分。
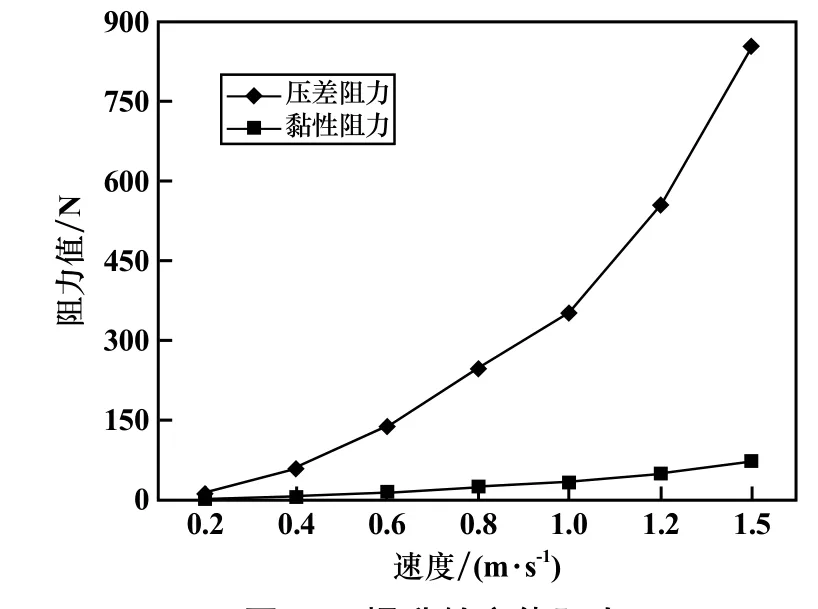
圖10 提升艙主體阻力
圖11 為附體在不同速度下的阻力變化情況。可見附體阻力組成中,黏性阻力和壓差阻力所占比重基本一致。對附體的機體結構分析可知,附體主要包括電池倉、控制倉和聲學倉,均為細長的圓和條狀,所占迎水面積不大,但與流體接觸面積較大,故會產生較大的黏性阻力,且隨著運動速度增加,兩者均逐漸增大。
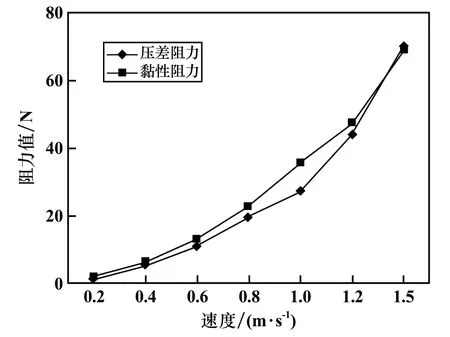
圖11 提升艙附體阻力
連接附體的阻力主要指主體與附體之間連接部分結構的水阻力,如圖12所示,連接附件的阻力以壓差阻力為主,由于采用橢圓形的外形設計,在速度1.5 m/s時,壓差阻力為192.78 N,黏性阻力為35.42 N。
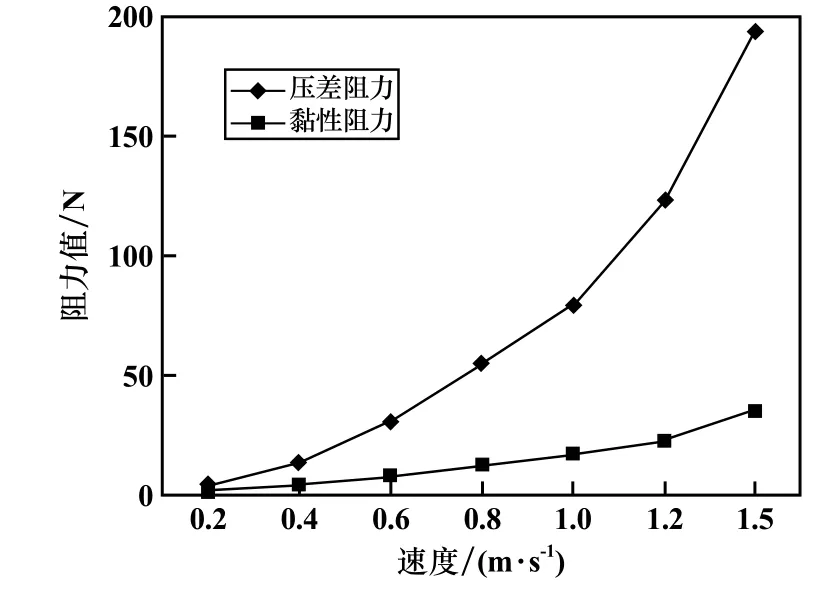
圖12 提升艙連接附件阻力
提升艙的總阻力隨速度的變化曲線如圖13所示。分析可知,主體阻力是提升艙總阻力的主要來源,附體阻力所占比重最小,在速度1.5 m/s時,總阻力可達1 295.82 N。
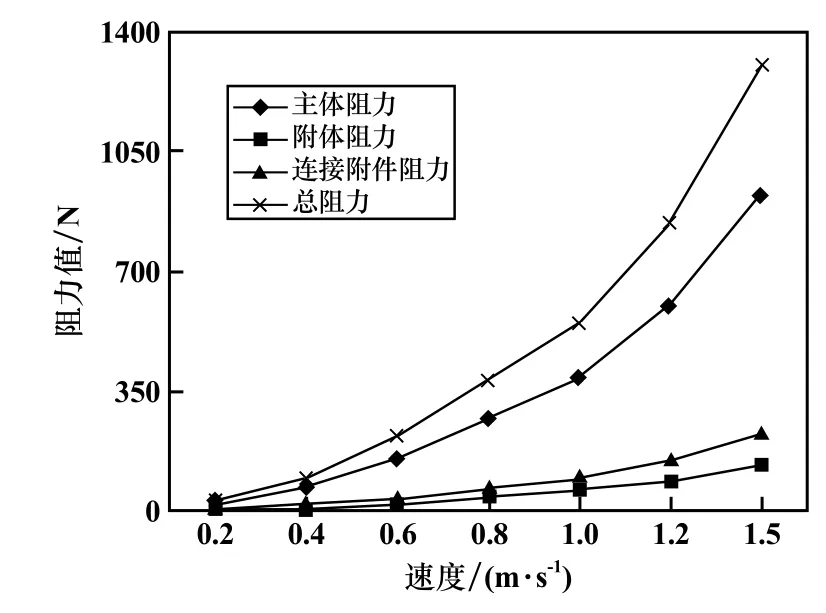
圖13 提升艙總阻力變化
3 布放姿態仿真分析
提升艙在從海面往下運動和往上運動接近海面時都不可避免地會受到海面海流的影響,故分析提升艙在運動時如何調整提升艙姿態使其受海流的影響最小,對于提升艙的控制和節約能源具有重要意義。圖14為提升艙下放過程受海流影響示意圖,圖中所畫來流方向為+X方向,提升艙運動方向為+Z方向,海流方向假定為與提升艙運動方向垂直,即處于XY平面內。
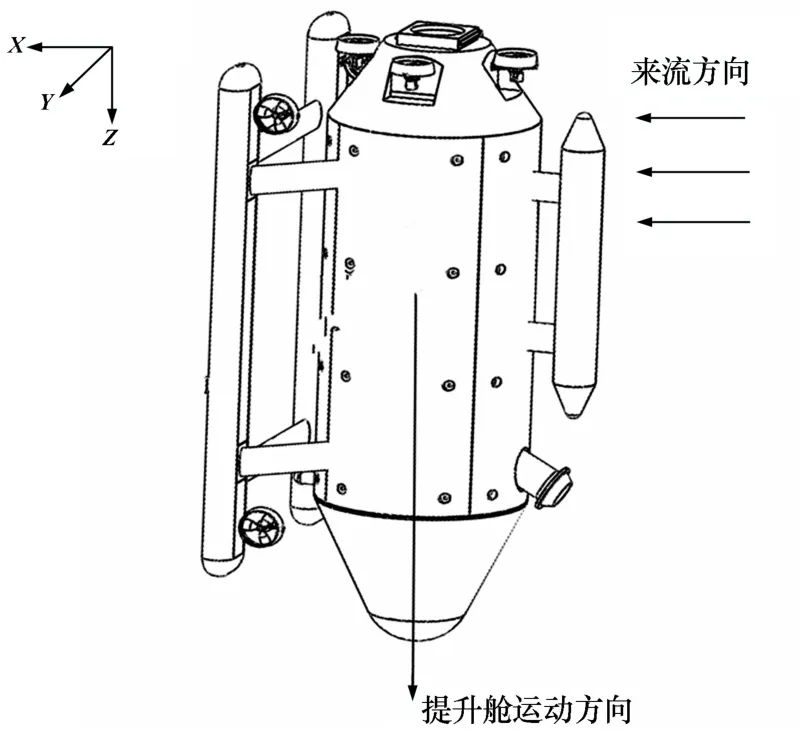
圖14 提升艙下放時受海流影響示意圖
采用完整的計算域進行計算,在海流速度設定為1 m/s的情況下,對以下幾種工況進行分析:
工況1:來流方向為+X,提升艙運動方向為+Z;
工況2:來流方向為-X,提升艙運動方向為+Z;
工況3:來流方向為+Y,提升艙運動方向為+Z;
工況4:來流方向與+X,+Y夾角為45°,提升艙運動方向為+Z;
工況5:來流方向與+X,-Y夾角為45°,提升艙運動方向為+Z。
3.1 計算條件設置
流體域依然采用六面體網格,網格數量為304萬,模型外表面采用邊界層網格結構,層數為8;網格質量最小為0.7,平均網格質量達到0.9以上。整個計算域采取多重網格加密的形式,在網格基本尺寸0.5 m條件下,分別按基本尺寸的50%、20%和100%作為3個加密區域的網格尺寸,使從模型表面到外邊界層的網格由密到疏,實現網格大小逐步過渡,在達到良好計算精度的同時節約計算資源,加快計算速度(見圖15)。同時在后處理過程中,模型附近密集的網格點分布有利于更好地觀察其周邊流場的變化情況。

圖15 計算域及網格劃分
由于海底海流速度一般比較平穩,約為0~3 cm/s,且隨著水深增加,海流速度逐漸變小。所以分別模擬計算連接附件在0.2、0.4、0.6、0.8、1.0、1.2和1.5 m/s下的運動情況,通過數值計算得出所受的水阻力大小,并對計算域內流場及模型表面各部分的壓力分布情況進行分析。
3.2 計算結果對比分析
分別對以上5種工況進行流體計算分析,結果如表1所示。
根據表1中的提升艙表面流線及壓強分布,結合所得的阻力數據可以看出,工況1和工況2條件下,提升艙主要阻力為X方向,工況1阻力相對較小;工況3、4和5條件下,X方向和Y方向均受到較大水阻力,不利于提升豎直方向運動和姿態的控制。因此,從提升艙便于控制和阻力最小的原則來看,工況1更有利于提升艙的水下運動。故建議在提升艙下放和回收過程中,調整提升艙的姿態以聲學倉的方向迎流,更有利于礦物的運輸。
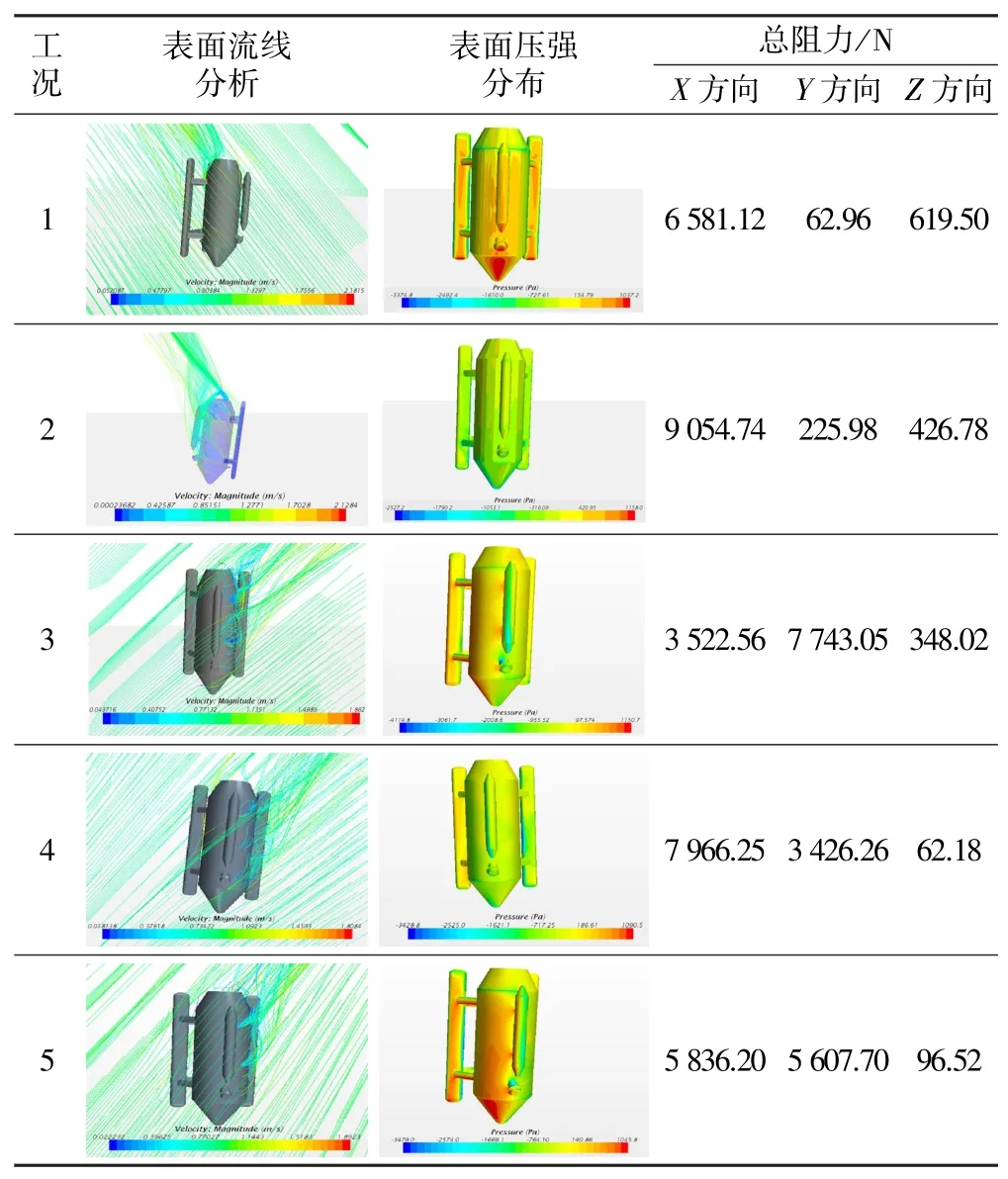
表1 不同布放姿態仿真分析
3.3 工況1條件下不同速度阻力分析
在工況1條件下對不同海流速度作用下的水阻力進行分析。根據資料統計,大洋表面的流速一般為1~2節,約為0~1 m/s[7],故分別在邊界條件速度入口設置中設置X方向流速為0.2、0.4、0.6、0.8和1.2 m/s,Z方向速度保持為1 m/s,進行數值計算,結果如表2所示。分析表2數據可知,隨著海流速度增大,提升艙X方向受力顯著增大,呈正相關關系;Y方向由于提升艙結構的對稱性,兩邊流場相似,故計算阻力較小;Z方向由于提升艙的運動速度為恒定值,受力較為穩定,在600 N左右波動。因此,在此種工況下,受海流影響時,應著重考慮X方向的受力,以達到穩定控制提升艙。
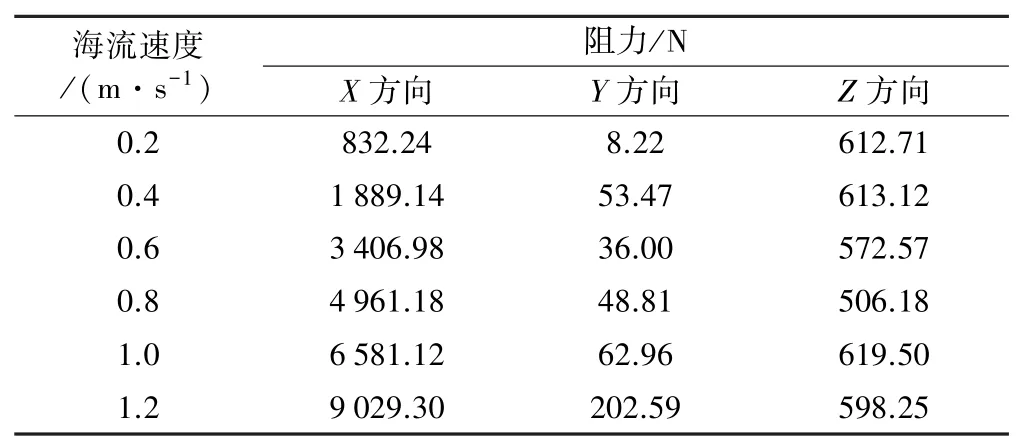
表2 不同海流速度下提升艙水阻力
4 結 論
1)針對深海采礦提升系統中難以應對惡劣海況的問題,提出了一種非連續輸運模式——潛浮式提升艙,根據其功能需求,綜合利用浮力調節、導航定位控制和水下接口技術等,對潛浮式提升艙進行了結構設計。
2)通過流體力學仿真軟件對提升倉在水平運動和豎直運動的水力學進行了分析,計算結果表明,提升艙水平運動時,隨運動速度增加,水阻力以壓差阻力為主,黏附阻力相對較小。通過對提升艙不同迎流方向的計算表明,以聲學倉正面迎流時,所受的流體阻力相對較小,且主要表現在X方向。在此工況下分別對不同海流速度下的阻力情況進行了分析,結果表明,隨著運動速度增加,X方向阻力變化明顯增大,Y和Z方向受力情況變化較小。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19