智能化交通視頻目標(biāo)車輛提取的數(shù)學(xué)模型分析
2021-05-15 04:23:06常天興
寧夏師范學(xué)院學(xué)報(bào) 2021年4期
常天興
(晉中職業(yè)技術(shù)學(xué)院 機(jī)電工程學(xué)院,山西 晉中 030600)
隨著智慧化交通視頻監(jiān)測(cè)技術(shù)的發(fā)展,需要構(gòu)建優(yōu)化的智能化交通視頻目標(biāo)車輛提取模型,根據(jù)對(duì)智能化交通視頻特征分布式融合和圖像處理結(jié)果,提取智能化交通視頻目標(biāo)車輛,提高車輛的實(shí)時(shí)監(jiān)控和識(shí)別能力.研究智能化交通視頻目標(biāo)車輛提取技術(shù),在促進(jìn)道路交通的智慧化信息管理方面具有重要意義,相關(guān)的智能化交通視頻目標(biāo)車輛提取技術(shù)研究在交通信息化管理中發(fā)揮重要作用,故研究智能化交通視頻目標(biāo)車輛提取技術(shù)受到人們的極大關(guān)注[1].
對(duì)智能化交通視頻目標(biāo)車輛提取技術(shù)設(shè)計(jì)是建立在對(duì)智能化交通視頻目標(biāo)車輛圖像的特征信息融合和模糊度識(shí)別基礎(chǔ)上,構(gòu)建智能化交通視頻目標(biāo)車輛提取的線性參數(shù)識(shí)別模型,通過(guò)模糊圖像辨識(shí)和邊緣特征檢測(cè),進(jìn)行智能化交通視頻目標(biāo)車輛圖像分割,實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛提取[2].當(dāng)前,對(duì)智能化交通視頻目標(biāo)車輛提取技術(shù)主要有基于相似度特征分析的智能化交通視頻目標(biāo)車輛提取方法、基于模糊特征檢測(cè)和線性分割的智能化交通視頻目標(biāo)車輛提取方法、基于統(tǒng)計(jì)特征信息處理的智能化交通視頻目標(biāo)車輛提取方法等,構(gòu)建智能化交通視頻目標(biāo)車輛提取的多維特征參數(shù)識(shí)別模型,結(jié)合聯(lián)合特征參數(shù)識(shí)別,實(shí)現(xiàn)對(duì)智能化交通視頻目標(biāo)車輛提取[3-5],但傳統(tǒng)方法進(jìn)行智能化交通視頻目標(biāo)車輛提取的精度不高,時(shí)間開(kāi)銷較大.針對(duì)上述問(wèn)題,提出基于邊緣輪廓特征檢測(cè)的智能化交通視頻目標(biāo)車輛提取數(shù)學(xué)模型構(gòu)建方法.首先采用多維視頻傳感器實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛圖像采集,對(duì)采集的智能化交通視頻目標(biāo)車輛圖像進(jìn)行邊緣輪廓特征檢測(cè)和信息識(shí)別,提取智能化交通視頻目標(biāo)車輛圖像的模糊度特征量,然后采用線性相關(guān)特征分析和圖像視覺(jué)特征融合技術(shù)實(shí)現(xiàn)對(duì)智能化交通視頻目標(biāo)車輛圖像的特征檢測(cè)和特征提取,建立智能化交通視頻目標(biāo)車輛圖像的檢測(cè)識(shí)別和視覺(jué)融合模型,根據(jù)對(duì)智能化交通視頻目標(biāo)車輛圖像的融合結(jié)果,采用邊緣輪廓特征檢測(cè)方法,實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛圖像特征提取.最后進(jìn)行仿真測(cè)試分析,展示所提方法在提高智能化交通視頻目標(biāo)車輛提取能力方面的優(yōu)越性能.
1 智能化交通視頻目標(biāo)車輛圖像采集和特征分析
1.1 智能化交通視頻目標(biāo)車輛圖像采集
為了實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛圖像采集,采用多維視頻傳感器拍攝智能化交通視頻目標(biāo)車輛圖像,并構(gòu)建智能化交通視頻目標(biāo)車輛圖像像素密度函數(shù),表示為
(1)
式(1)中,隨機(jī)樣本s的色彩深度值為p(s),a為像素點(diǎn)數(shù)目,基于細(xì)節(jié)融合方法,采用模糊粗糙集理論,進(jìn)行智能化交通視頻目標(biāo)車輛圖像分割和樣本空間融合處理
(2)
式(2)中,A為車輛像素分辨率,K為紋理值.通過(guò)迭代與低層特征合并的方法,得到視頻目標(biāo)車輛圖像層次化調(diào)度模型為
(3)
式(3)中,B為尺度因子,Ds為空間細(xì)節(jié)度,采用細(xì)化處理和模糊聚類方法[6],得到智能化交通視頻目標(biāo)車輛圖像的參量為
W=[gx1(x1,y1)+gx2(x2,y2)](x2-x2),
(4)
式(4)中,(xi,yi)為車輛圖像像素點(diǎn),gx1,gx2分別為車輛圖像像素多維尺度小波分解率,設(shè)每個(gè)層級(jí)的特征圖中,D為闕值,得到級(jí)聯(lián)融合下的智能化交通視頻目標(biāo)車輛的自適應(yīng)加權(quán)融合估計(jì)為
(5)
式(5)中,R為目標(biāo)車輛圖像的每層特征圖權(quán)重,X為每層圖像的最小化誤差,δ為車輛運(yùn)行軌道參數(shù)均方差.構(gòu)建智能化交通視頻目標(biāo)車輛圖像的多維參數(shù)采集模型為
(6)
從中間層特征復(fù)用智能化交通視頻目標(biāo)車輛圖像信息,得到灰度像素集為M×N,采用圖像語(yǔ)義分割方法,得到智能化交通視頻目標(biāo)車輛圖像采集為
α=Rsinηcosφ0≤φ≤2π,
(7)
其中,η表示智能化交通視頻目標(biāo)車輛圖像輸出粗糙集,φ表示稀疏特征分量,R表示智能化交通視頻目標(biāo)車輛圖像的模板匹配系數(shù).由此,智能化交通視頻目標(biāo)車輛圖像信息采集結(jié)束,再對(duì)其進(jìn)行特征分析.
1.2 智能化交通視頻目標(biāo)車輛圖像特征分析
為了實(shí)現(xiàn)目標(biāo)車輛圖像特征分析,對(duì)已采集的智能化交通視頻目標(biāo)車輛圖像進(jìn)行邊緣輪廓特征檢測(cè)和信息識(shí)別,通過(guò)聯(lián)合相似度特征分解方法[7],提取智能化交通視頻目標(biāo)車輛圖像的邊緣輪廓灰度序列,得到智能化交通視頻目標(biāo)車輛的灰度序列為
(8)
式(8)中,i為車輛圖像灰度值,i′為車輛圖像亮度值,S為信息深層特征灰度集,N為信息的亮度特征集,N表示智能化交通視頻目標(biāo)車輛圖像的灰度差值.智能化交通視頻目標(biāo)車輛檢測(cè)的模糊度辨識(shí)參數(shù)為
(9)
其中,a為智能化交通視頻目標(biāo)車輛圖像檢測(cè)的陰影闕值;b為智能化交通視頻目標(biāo)車輛圖像的透射率.
使用亮度特征來(lái)對(duì)智能化交通視頻目標(biāo)車輛圖像進(jìn)行深度學(xué)習(xí),得到智能化交通視頻目標(biāo)車輛檢測(cè)的圖像信息分布滿足
(10)
其中,δ為智能化交通視頻目標(biāo)車輛圖像的亮度區(qū)域分布概率,δ為智能化交通視頻目標(biāo)車輛圖像反射率.
結(jié)合多維參數(shù)識(shí)別方法,構(gòu)建智能化交通視頻目標(biāo)車輛檢測(cè)模型,得到檢測(cè)識(shí)別模型為

(11)
式(11)中,j為中心環(huán)繞值.
根據(jù)上述分析,對(duì)所采集的智能化交通視頻目標(biāo)車輛圖像完成了邊緣輪廓特征檢測(cè)和信息識(shí)別分析,為智能化交通視頻目標(biāo)車輛圖像的模糊度特征的檢測(cè)和提取提供了基礎(chǔ).
2 智能化交通視頻目標(biāo)車輛提取優(yōu)化
2.1 智能化交通視頻目標(biāo)特征檢測(cè)
為了實(shí)現(xiàn)智能化交通視頻目標(biāo)特征檢測(cè),根據(jù)智能化特征分布式融合方法[8],完成了智能化交通視頻目標(biāo)車輛圖像參數(shù)識(shí)別,得到級(jí)聯(lián)融合下,智能化交通視頻目標(biāo)車輛圖像的模板匹配度為
(12)
式(12)中,r為車輛圖像分層濾波,N為智能化交通視頻目標(biāo)車輛圖像檢測(cè)的接權(quán)值,e為車輛顏色模型的編碼權(quán)重,利用線性回歸分析方法,得到平移映射參數(shù)分布
(13)
式(13)中,k為異步辨識(shí)度,并且k≠l.
根據(jù)尺度縮放映射分布,采用統(tǒng)計(jì)分析和直方圖交集融合方法[9],得到交通視頻目標(biāo)車輛圖像解析度為
(14)
式(14)中,u為目標(biāo)車輛穩(wěn)態(tài)率,F(xiàn)為目標(biāo)車輛圖像彩色采樣點(diǎn).
采用雙線性插值方法[10],得到智能化交通視頻目標(biāo)車輛圖像的樣本圖模型為
(15)
式(15)中,?為車輛圖像的顏色數(shù)組索引值.對(duì)式(15)進(jìn)行歸一化處理,構(gòu)建智能化交通視頻目標(biāo)特征檢測(cè)模型,用Lx,y來(lái)表示(x,y)位置處像素點(diǎn)處聯(lián)合特征參數(shù),得到智能化交通視頻目標(biāo)車輛圖像的邊緣特征檢測(cè)輸出為
Vx,y=med(Lx-1,y-1,…,Lx,y,…,Lx+1,y+1).
(16)
根據(jù)上述分析,實(shí)現(xiàn)了智能化交通視頻目標(biāo)特征檢測(cè),以便對(duì)智能化交通視頻目標(biāo)車輛特征進(jìn)行提取優(yōu)化.
2.2 智能化交通視頻目標(biāo)特征提取優(yōu)化
為了對(duì)檢測(cè)到的智能化交通視頻目標(biāo)特征進(jìn)行優(yōu)化提取,基于屬性參數(shù)融合和超維像素特征分析方法[11],進(jìn)行智能化交通視頻目標(biāo)車輛特征提取過(guò)程中的灰度直方圖重構(gòu),得到智能化交通視頻圖像特征的線性方程描述為
Γ=Ix1(x1,x2)(x1-x1)+Ix2(x1,x2)(x2-x2).
(17)
若交通視頻目標(biāo)車輛圖像的統(tǒng)計(jì)特征量滿足C(x)=0,則
Q=2π[Γ·ln(x2-x1)]·U,
(18)
其中,U為車輛圖像像素特征融合度,采用特征復(fù)用的方式[12],建立智能化交通視頻目標(biāo)車輛圖像的超分辨率重建模型,超分辨重組結(jié)果
(19)
其中μ為智能化交通視頻目標(biāo)車輛圖像的超分辨率,η為智能化交通視頻目標(biāo)車輛圖像小波軟閾值,智能化交通視頻目標(biāo)車輛圖像采集時(shí)間間隔為n.對(duì)智能化交通視頻目標(biāo)車輛圖像的信息融合和濾波降噪[13],得到智能化交通視頻目標(biāo)車輛圖像特征提取的輸出參數(shù)為
ψ=(c1-a)(δ·pl-2J-δ+c2+c1).
(20)
綜上分析,完成了智能化交通視頻目標(biāo)車輛圖像提取模型優(yōu)化.實(shí)現(xiàn)了智能化交通視頻目標(biāo)車輛檢測(cè)的數(shù)學(xué)模型優(yōu)化設(shè)計(jì).
3 仿真測(cè)試與結(jié)果分析
為了驗(yàn)證所提方法在實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛檢測(cè)和特征提取中的應(yīng)用性能,采用Matlab進(jìn)行仿真測(cè)試分析,構(gòu)建智能化交通視頻目標(biāo)車輛圖像檢測(cè)模型,檢測(cè)的傳感器節(jié)點(diǎn)為200,圖像信息采集的Sink節(jié)點(diǎn)為12,交通視頻跟蹤識(shí)別的采樣頻率為24 KHz,圖像的模板匹配系數(shù)為0.25,根據(jù)上述參數(shù)設(shè)定,得到智能化交通視頻目標(biāo)車輛圖像采集結(jié)果如圖1所示.
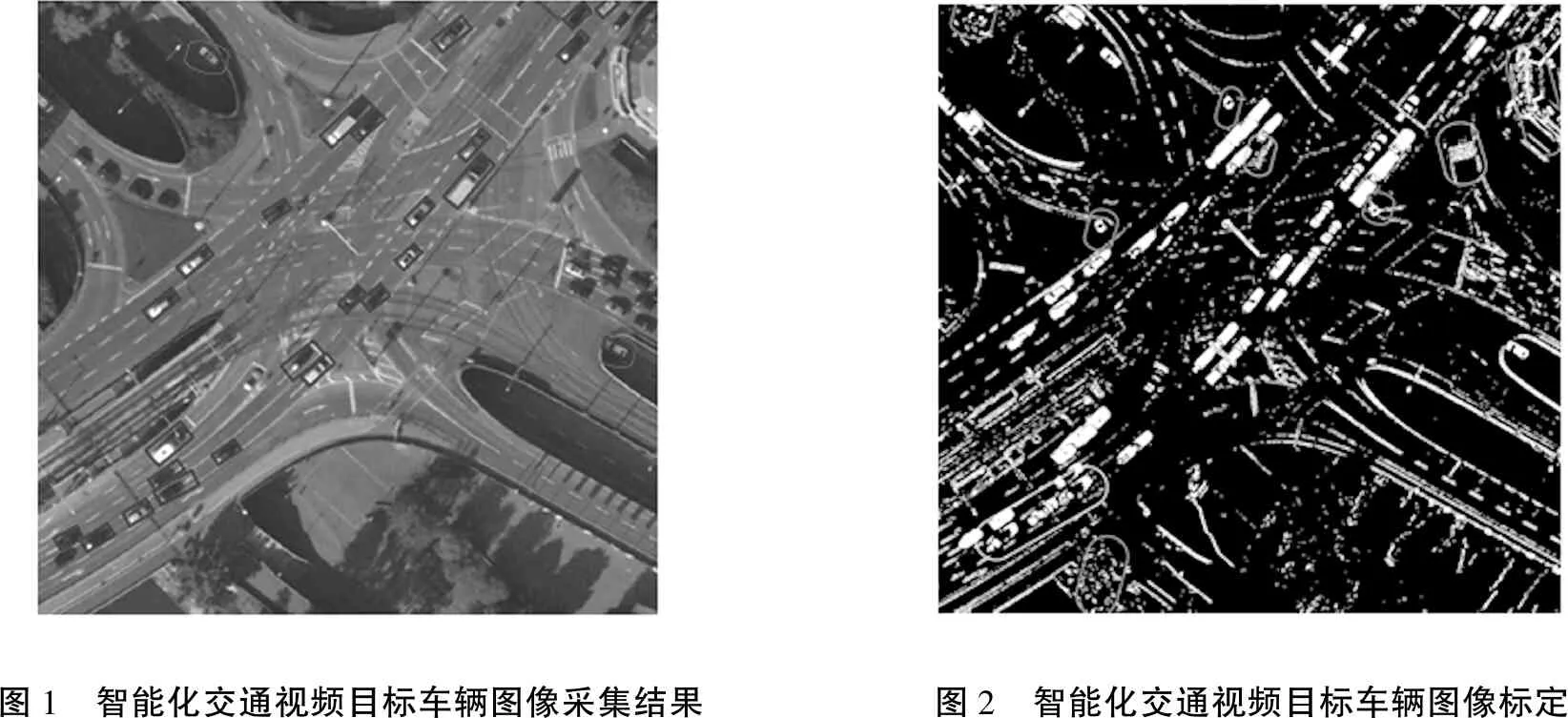
圖1 智能化交通視頻目標(biāo)車輛圖像采集結(jié)果圖2 智能化交通視頻目標(biāo)車輛圖像標(biāo)定
以圖1采集的智能化交通視頻目標(biāo)車輛圖像為測(cè)試對(duì)象,進(jìn)行智能化交通視頻目標(biāo)車輛圖像標(biāo)定,如圖2所示.
分析圖2得知,所提方法能有效實(shí)現(xiàn)對(duì)智能化交通視頻目標(biāo)車輛圖像標(biāo)定,在此基礎(chǔ)上,實(shí)現(xiàn)對(duì)智能化交通視頻目標(biāo)車輛提取.
3.1 智能化交通視頻目標(biāo)車輛圖像的辨識(shí)度測(cè)試
智能化交通視頻目標(biāo)車輛特征提取如圖3所示.
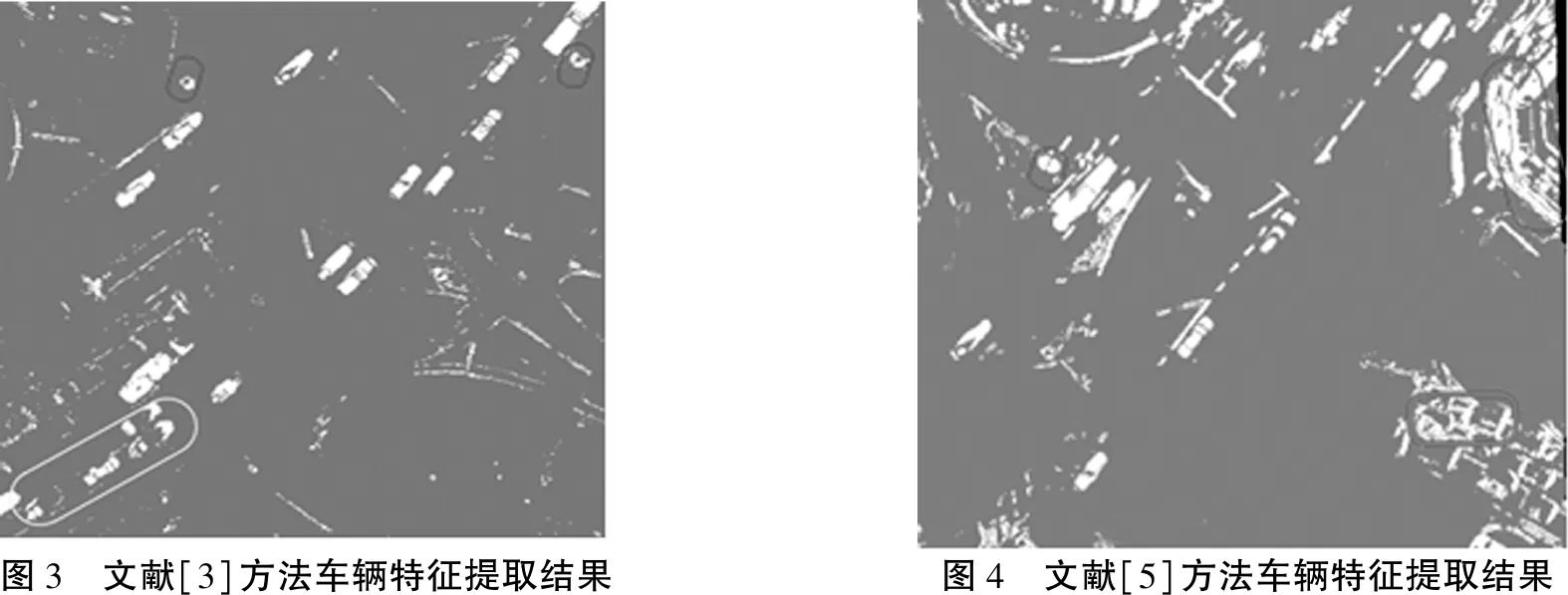
圖3 文獻(xiàn)[3]方法車輛特征提取結(jié)果圖4 文獻(xiàn)[5]方法車輛特征提取結(jié)果
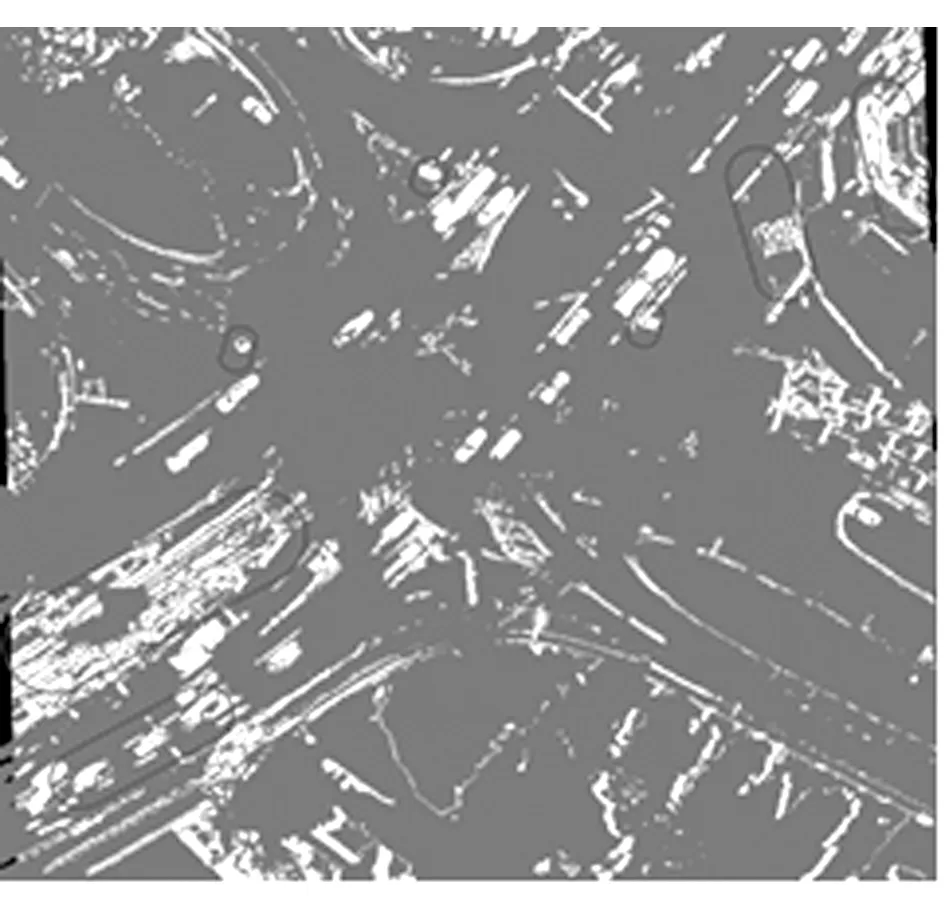
圖5 所提方法車輛特征提取結(jié)果
分析圖3-圖5得知,所提方法在提取智能化交通視頻目標(biāo)車輛特征時(shí),對(duì)車輛圖像的辨識(shí)度更高.
3.2 智能化交通視頻目標(biāo)車輛圖像的精度測(cè)試
針對(duì)不同方法進(jìn)行智能化交通視頻目標(biāo)車輛檢測(cè)定位的精度測(cè)試,結(jié)果見(jiàn)圖6.
分析圖6可知,所提方法所檢測(cè)的車輛定位誤差率維持在10%以下,與文獻(xiàn)[3]、文獻(xiàn)[4]方法相比,誤差較低,由此可知所提方法精度較高.
3.3 智能化交通視頻目標(biāo)車輛圖像的效率測(cè)試
針對(duì)不同方法進(jìn)行智能化交通視頻目標(biāo)車輛檢測(cè)定位的效率測(cè)試,結(jié)果見(jiàn)圖7.
分析圖7可知,所提方法在固定時(shí)間段內(nèi)檢測(cè)數(shù)量可達(dá)到200個(gè).在任意時(shí)間節(jié)點(diǎn)上,所提方法與文獻(xiàn)[3]以及文獻(xiàn)[5]相比,車輛檢測(cè)的數(shù)量更多.由此可知所提方法進(jìn)行車輛檢測(cè)時(shí)效率更高.
4 結(jié)語(yǔ)
構(gòu)建智能化交通視頻目標(biāo)車輛提取的線性參數(shù)識(shí)別模型,所提出的基于邊緣輪廓特征檢測(cè)的智能化交通視頻目標(biāo)車輛提取數(shù)學(xué)模型構(gòu)建方法.采用模糊粗糙集理論,進(jìn)行智能化交通視頻目標(biāo)車輛圖像分割和樣本空間融合處理,提取智能化交通視頻目標(biāo)車輛圖像的模糊度特征量,根據(jù)智能化特征分布式融合方法,構(gòu)建智能化交通視頻目標(biāo)車輛圖像參數(shù)識(shí)別模型,實(shí)現(xiàn)智能化交通視頻目標(biāo)車輛檢測(cè)的數(shù)學(xué)模型優(yōu)化設(shè)計(jì).研究得知,所提方法進(jìn)行智能化交通視頻目標(biāo)車輛提取的辨識(shí)性能較好,檢測(cè)精度和效率較高.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)交通信息化(2017年4期)2017-06-06 07:21:52
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
能源(2015年8期)2015-05-26 09:15:56
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
